产业需求 | Requirements
自动化与机器人的驱动挑战Drive challenges in automation & robotics
旋转关节、搬运轴与取放模块对扭矩、动态、整合度与可靠性有不同需求。
旋转关节需足够扭矩Sufficient Torque for Rotary Joints
扭矩电机 / RDDS
机器人运动学的旋转关节与转台需要足够的扭矩与刚性。应采用扭矩电机(RKI、RMK/RMF)或整合式 RDDS 子系统;印刷电路板式的 UPR 出力较低,仅适合轻量、低惯量的旋转轴,不作为高负载关节驱动。
即用型整合模块Ready-to-Use Integration
RDDS:robot kinematics
机构整合复杂、开发时程紧。RDDS 将电机、轴承、测量与冷却整合为即用模块,官方应用即包含机器人运动学(robot kinematics)与自动化搬运轴(handling axes),大幅减少组装、调整与维护工作。
高速取放周期High-Speed Pick & Place
Z 轴加速达 1,000 m/s²
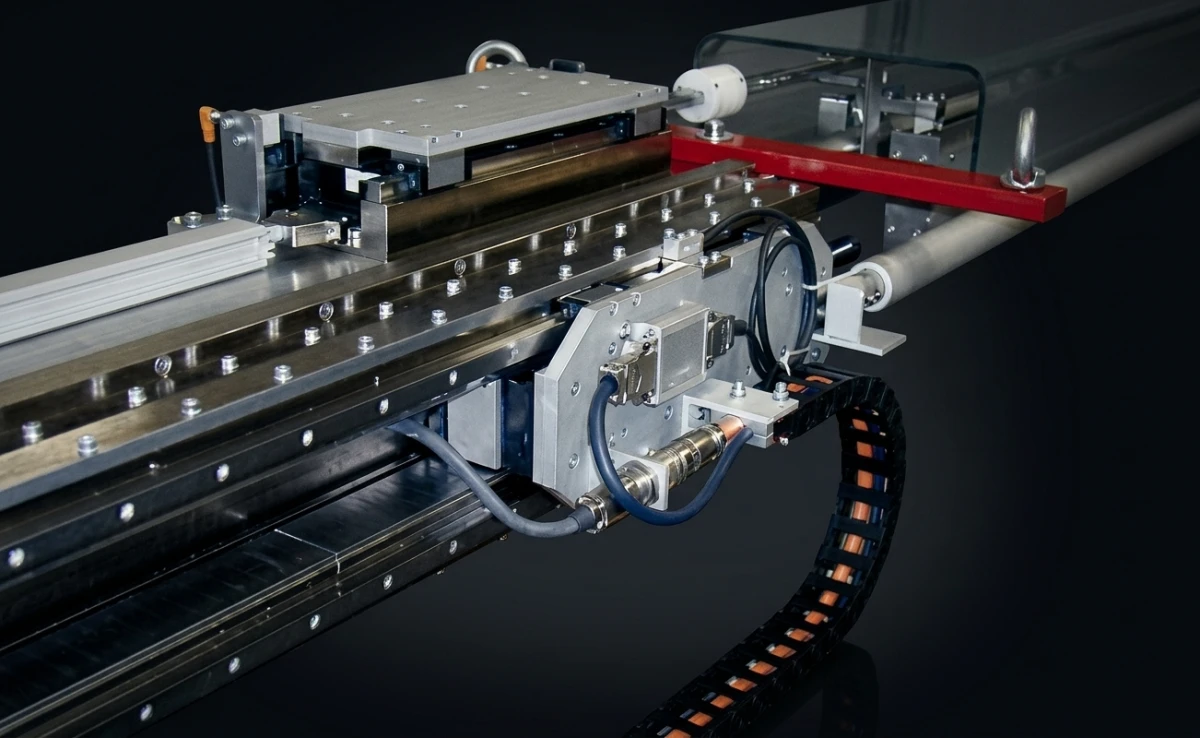
取放与搬运追求最高产能。线性电机高动态驱动水平轴,Z 轴短行程致动器作快速垂直轴,RDDS 作 Pick & Place 定位转台,三者构成高速、高重复性的取放模块。
免维护高可靠Maintenance-Free & Reliable
无背隙・低磨耗
自动化产线要求长期不停机运行。直驱无接触磨耗、免维护,RDDS 无背隙、低磨耗,确保搬运与取放在高节拍下的长期稳定可靠。
Schaeffler 解决方案 | Solutions
自动化与机器人直驱方案Direct drive solutions for automation & robotics
RDDS 子系统作旋转轴与搬运轴,扭矩电机作旋转关节,线性 + Z 轴作高速取放。

RDDS 旋转直驱子系统Rotary Direct Drive Systems
整合扭矩电机、精密轴承、测量与冷却的即用型旋转模块。官方应用涵盖机器人运动学、自动化搬运轴、Pick & Place 定位转台与测试台,服务自动化产业。RDDS-20-B 为高度整合的即用型单机。
- RDDS1 Ø130 – 230、RDDS2 Ø240 – 565 mm
- 无背隙、高刚性、运转平稳、易于组装
- 官方应用:robot kinematics、handling axes、pick & place

扭矩电机(旋转关节 / 转台)Torque Motors for Rotary Joints
RKI 高性能内转式电机在安装空间内提供最大扭矩,适用快速旋转轴与转台;RMK/RMF 无槽铁芯电机运动极均匀,适合高精度旋转定位。两者直接驱动旋转关节与分度轴,零齿隙、免维护。
- RKI 峰值扭矩 88 – 17,670 Nm
- RMK/RMF 直径 70 – 2,500 mm,扭矩 2 – 15,000 Nm
- 零齿隙、优异同步特性
应用案例 | Application Cases
自动化与机器人的典型应用场景Typical applications in automation & robotics
机器人运动学、搬运轴与 Pick & Place 定位转台对应 RDDS 官方自动化应用。

机器人运动学 | Robot Kinematics
机器人运动学与自动化单元
机器人运动学的旋转轴需要高扭矩、无背隙的直接驱动。RDDS 旋转直驱子系统官方应用即包含机器人运动学(robot kinematics)与自动化搬运轴,整合式即用模块减少组装与维护工作。

协作机器人 | Collaborative Robots
协作机器人关节直驱
协作机器人(cobot)的关节要求零齿隙、运转极平稳、结构紧凑与精准的力控与反向驱动性。框架式(frameless)无槽铁芯扭矩电机 RMK/RMF 运动极均匀、无齿槽、低惯量,可作为协作机器人关节的直驱方案,消除减速机间隙、提升力控精度与安全互动性。
直角坐标机器人 | Cartesian Robots
高速直角坐标机器人系统
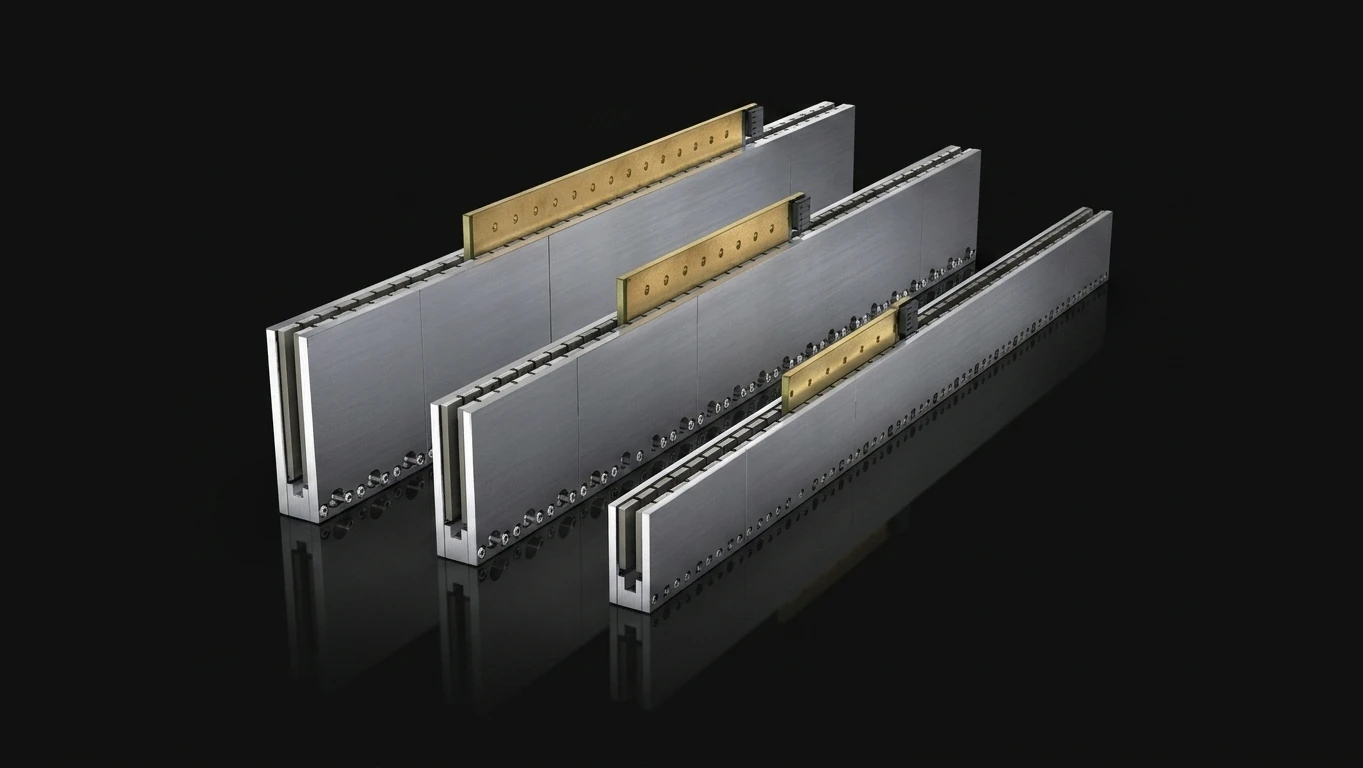
直角坐标(cartesian/gantry)机器人以线性电机取代滚珠丝杠驱动 XYZ 轴,达成更高速度、更高加速与更长寿命(无接触磨耗传动)。UPLplus 无铁芯与 L1 有铁芯线性电机提供高动态、零齿隙的直线定位,搭配 Z 轴短行程致动器(LDDS)作快速垂直轴,大幅提升取放与搬运节拍。
需要自动化与机器人直驱方案?
我们的应用工程师团队随时为您提供技术咨询与产品选型建议