ระบบอัตโนมัติและหุ่นยนต์
การใช้งานมอเตอร์ขับเคลื่อนตรง
Automation & Robotics — Direct Drive Applications
ระบบอัตโนมัติและหุ่นยนต์ต้องการการเคลื่อนที่แบบหมุนและเชิงเส้นที่สมดุลระหว่างทอร์ก ไดนามิกและการบูรณาการ ในฐานะโมดูลพร้อมใช้งาน ระบบย่อยขับเคลื่อนตรงแบบหมุน RDDS ครอบคลุมคิเนเมติกส์ของหุ่นยนต์ แกนขนถ่ายในระบบอัตโนมัติและโต๊ะจัดตำแหน่ง Pick & Place ในการใช้งานทางการ มอเตอร์ทอร์กให้ทอร์กสูงที่จำเป็นสำหรับข้อต่อหมุนและโต๊ะหมุน ส่วนมอเตอร์เชิงเส้นจับคู่กับระบบย่อยแกน Z ช่วยให้การหยิบวางทำได้ด้วยความเร็วสูง
ความท้าทายของการขับเคลื่อนในระบบอัตโนมัติและหุ่นยนต์Drive challenges in automation & robotics
ข้อต่อหมุน แกนขนถ่ายและโมดูลหยิบวางมีความต้องการที่แตกต่างกันในด้านทอร์ก ไดนามิก การบูรณาการและความน่าเชื่อถือ
ทอร์กเพียงพอสำหรับข้อต่อหมุนSufficient Torque for Rotary Joints
ข้อต่อหมุนและโต๊ะหมุนของคิเนเมติกส์หุ่นยนต์ต้องการทอร์กและความแข็งเกร็งที่เพียงพอ ควรใช้มอเตอร์ทอร์ก (RKI, RMK/RMF) หรือระบบย่อย RDDS แบบบูรณาการ ส่วน UPR แบบแผงวงจรพิมพ์มีกำลังขับต่ำกว่าและเหมาะเฉพาะแกนหมุนที่เบาและมีความเฉื่อยต่ำ ไม่เหมาะกับการขับเคลื่อนข้อต่อที่รับโหลดสูง
บูรณาการพร้อมใช้งานReady-to-Use Integration
การบูรณาการกลไกมีความซับซ้อนและกำหนดการพัฒนาตึงตัว RDDS รวมมอเตอร์ ตลับลูกปืน ระบบวัดและระบบระบายความร้อนเข้าเป็นโมดูลพร้อมใช้งาน โดยมีการใช้งานทางการรวมถึงคิเนเมติกส์หุ่นยนต์และแกนขนถ่ายในระบบอัตโนมัติ ช่วยลดงานประกอบ ปรับตั้งและบำรุงรักษาอย่างมาก
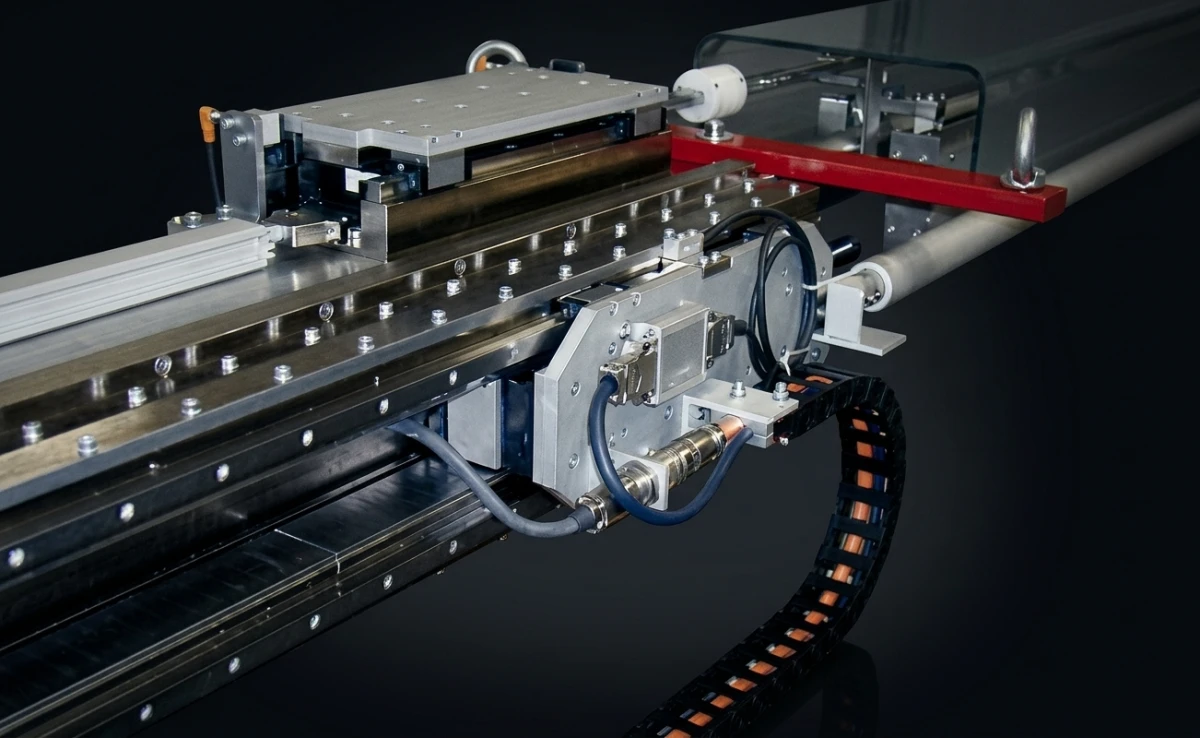
การหยิบวางความเร็วสูงHigh-Speed Pick & Place
การหยิบวางและการขนถ่ายมุ่งเน้นปริมาณงานสูงสุด มอเตอร์เชิงเส้นขับเคลื่อนแกนแนวนอนด้วยไดนามิกสูง แอกชูเอเตอร์ช่วงชักสั้นแกน Z ทำหน้าที่เป็นแกนแนวตั้งที่รวดเร็ว และ RDDS ทำหน้าที่เป็นโต๊ะจัดตำแหน่ง Pick & Place — ทั้งสามรวมกันเป็นโมดูลหยิบวางความเร็วสูงและความสามารถทำซ้ำสูง
ปลอดการบำรุงรักษาและน่าเชื่อถือMaintenance-Free & Reliable
สายการผลิตอัตโนมัติต้องการการทำงานต่อเนื่องระยะยาวไม่หยุด การขับเคลื่อนตรงไม่สัมผัส ไม่สึกหรอและปลอดการบำรุงรักษา RDDS มีแบ็คแลชเป็นศูนย์และสึกหรอต่ำ รับประกันเสถียรภาพและความน่าเชื่อถือระยะยาวของการขนถ่ายและการหยิบวางที่จังหวะสูง
โซลูชันขับเคลื่อนตรงสำหรับระบบอัตโนมัติและหุ่นยนต์Direct drive solutions for automation & robotics
ระบบย่อย RDDS เป็นแกนหมุนและแกนขนถ่าย มอเตอร์ทอร์กเป็นข้อต่อหมุน และมอเตอร์เชิงเส้น + แกน Z สำหรับการหยิบวางความเร็วสูง

ระบบขับเคลื่อนตรงแบบหมุน RDDSRotary Direct Drive Systems
โมดูลหมุนพร้อมใช้งานที่รวมมอเตอร์ทอร์ก ตลับลูกปืนความแม่นยำ ระบบวัดและระบบระบายความร้อนเข้าด้วยกัน การใช้งานทางการครอบคลุมคิเนเมติกส์หุ่นยนต์ แกนขนถ่ายในระบบอัตโนมัติ โต๊ะจัดตำแหน่ง Pick & Place และโต๊ะทดสอบ ให้บริการอุตสาหกรรมระบบอัตโนมัติ โดย RDDS-20-B เป็นชุดพร้อมใช้งานที่บูรณาการสูง
- RDDS1 Ø130 – 230, RDDS2 Ø240 – 565 mm
- แบ็คแลชเป็นศูนย์ ความแข็งเกร็งสูง ทำงานราบรื่น ประกอบง่าย
- การใช้งานทางการ: คิเนเมติกส์หุ่นยนต์ แกนขนถ่าย pick & place

มอเตอร์ทอร์ก (ข้อต่อหมุน / โต๊ะหมุน)Torque Motors for Rotary Joints
มอเตอร์โรเตอร์ภายในสมรรถนะสูง RKI ให้ทอร์กสูงสุดในพื้นที่ที่มีอยู่ เหมาะกับแกนหมุนเร็วและโต๊ะหมุน ส่วนมอเตอร์แกนเหล็กไร้ร่อง RMK/RMF เคลื่อนที่สม่ำเสมออย่างยิ่ง เหมาะกับการจัดตำแหน่งหมุนความแม่นยำสูง ทั้งสองขับเคลื่อนข้อต่อหมุนและแกนแบ่งองศาโดยตรง ด้วยแบ็คแลชเป็นศูนย์และปลอดการบำรุงรักษา
- RKI ทอร์กสูงสุด 88 – 17,670 Nm
- RMK/RMF เส้นผ่านศูนย์กลาง 70 – 2,500 mm ทอร์ก 2 – 15,000 Nm
- แบ็คแลชเป็นศูนย์ การซิงโครไนซ์ยอดเยี่ยม
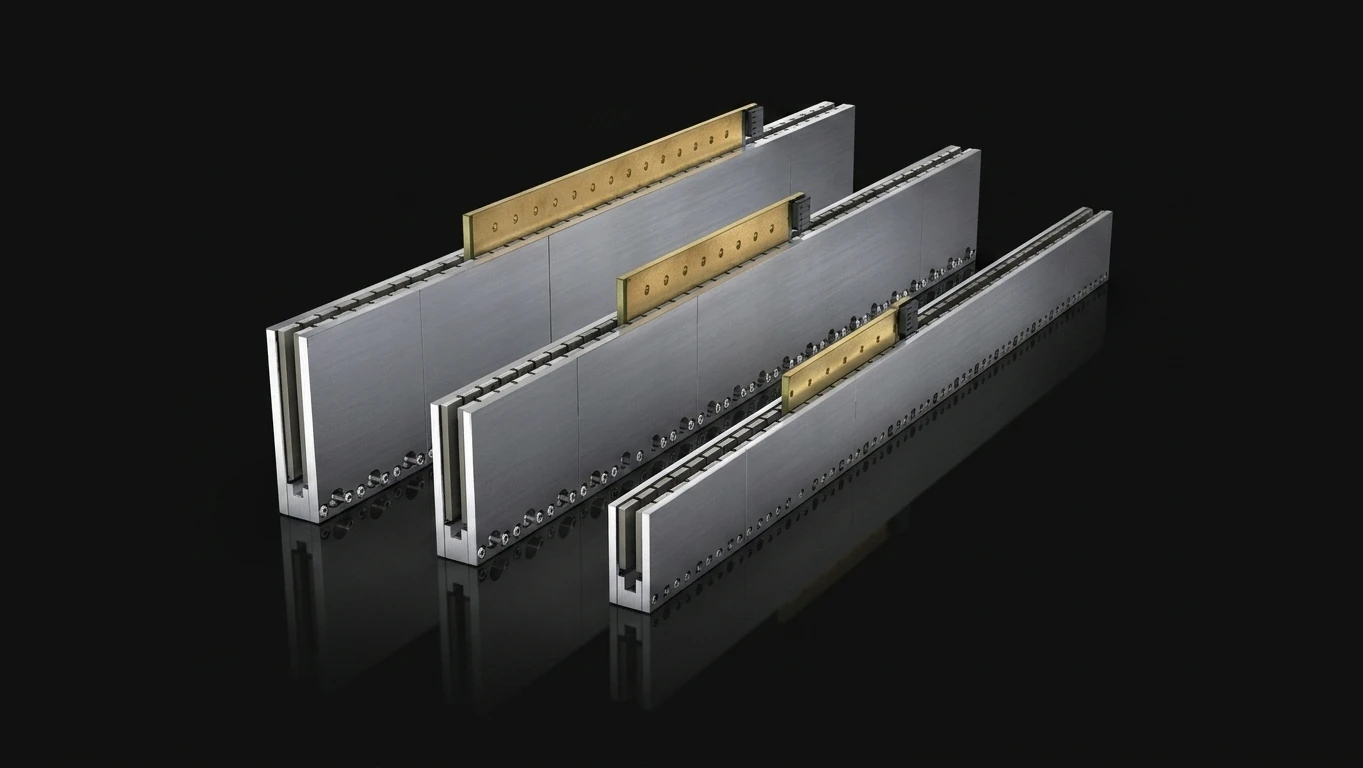
มอเตอร์เชิงเส้นและโมดูลหยิบวางแกน ZLinear Motors & Z-Axis Modules
มอเตอร์เชิงเส้นไร้แกนเหล็ก UPLplus ขับเคลื่อนแกนแนวนอนไดนามิกสูงด้วยอัตราส่วนแรงต่อมวล +42% และมวลเคลื่อนที่ต่ำ ส่วนแกน Z รุ่น LDDS-032 / LDDS-078 ทำหน้าที่เป็นแกนกดลงที่รวดเร็ว ทั้งคู่รวมกันเป็นโมดูลหยิบวางและขนถ่ายความเร็วสูงและความสามารถทำซ้ำสูง
- UPLplus แรงสูงสุด 100 – 1,300 N ความเร็วสูงสุด 30.4 m/s
- LDDS-032 แรงสูงสุด 640 N, LDDS-078 น่าเชื่อถือถึงหนึ่งพันล้านรอบ
- ไม่มี cogging ปลอดการบำรุงรักษา หยิบวางไดนามิกสูง
การใช้งานทั่วไปในระบบอัตโนมัติและหุ่นยนต์Typical applications in automation & robotics
คิเนเมติกส์หุ่นยนต์ แกนขนถ่ายและโต๊ะจัดตำแหน่ง Pick & Place สอดคล้องกับการใช้งานระบบอัตโนมัติทางการของ RDDS


เรียนรู้เพิ่มเติมเกี่ยวกับการใช้งานที่เกี่ยวข้องExplore related applications
ต้องการโซลูชันขับเคลื่อนตรงสำหรับระบบอัตโนมัติและหุ่นยนต์?
ทีมวิศวกรการใช้งานของเราพร้อมให้คำปรึกษาทางเทคนิคและคำแนะนำการเลือกผลิตภัณฑ์เสมอ