5 調試
5.1 訊號傳輸
為提高抗雜訊能力,我們建議使用符合 RS-422 標準的差動訊號。以反相訊號相位的平衡訊號傳輸可以有效防止干擾。幾乎所有現代驅動控制器都支援此選項。
雙絞線用於傳輸訊號(A+、B+、R+)及對應的反相訊號(A-、B-、R-)。在接收端,通過取兩個訊號電位之差來生成訊號。
使用單端訊號傳輸時,訊號電位相對於參考電位變化。這種訊號傳輸方式更容易受到干擾。此情況下的訊號振幅為差動傳輸訊號的一半。
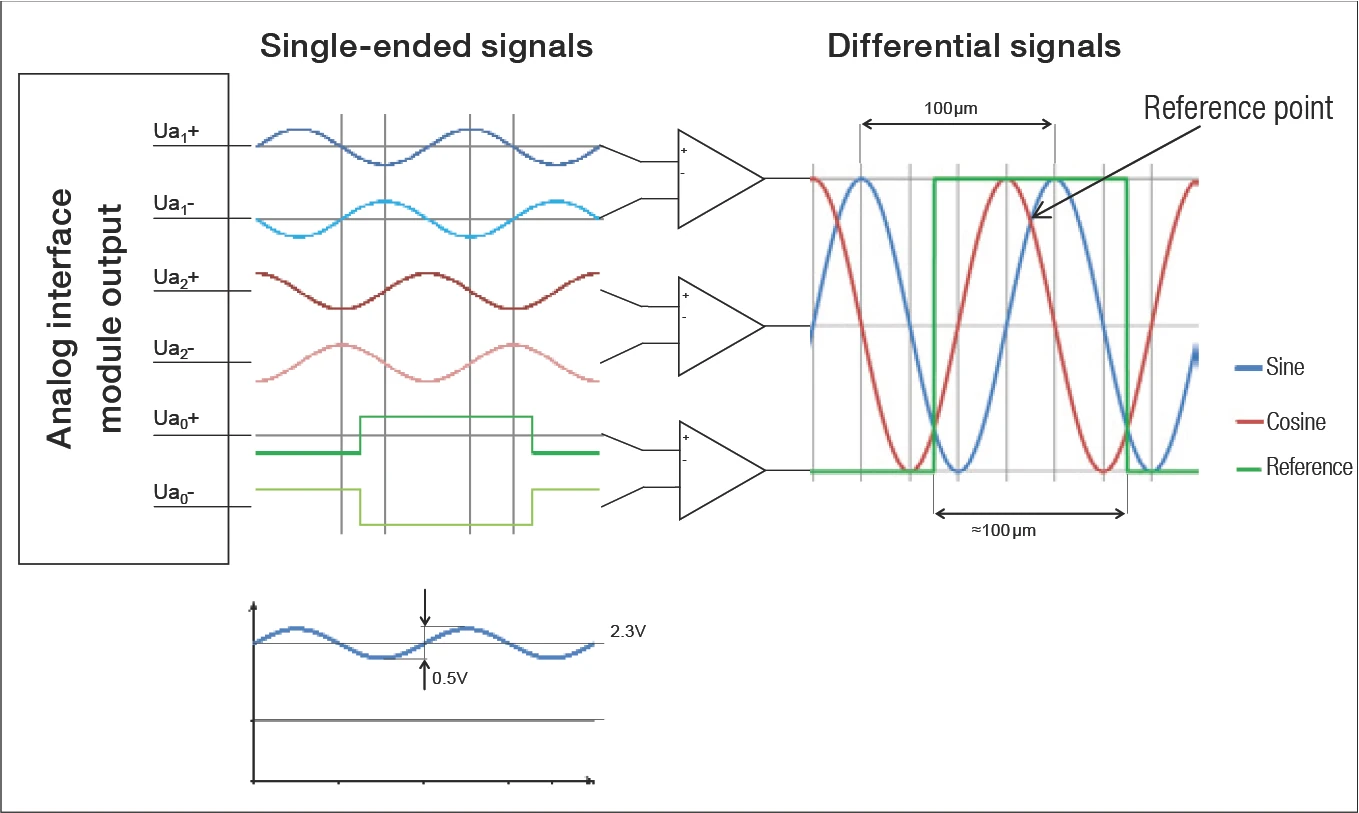
介面模組的類比輸出訊號。可以單端(參考接地)或差動方式使用。
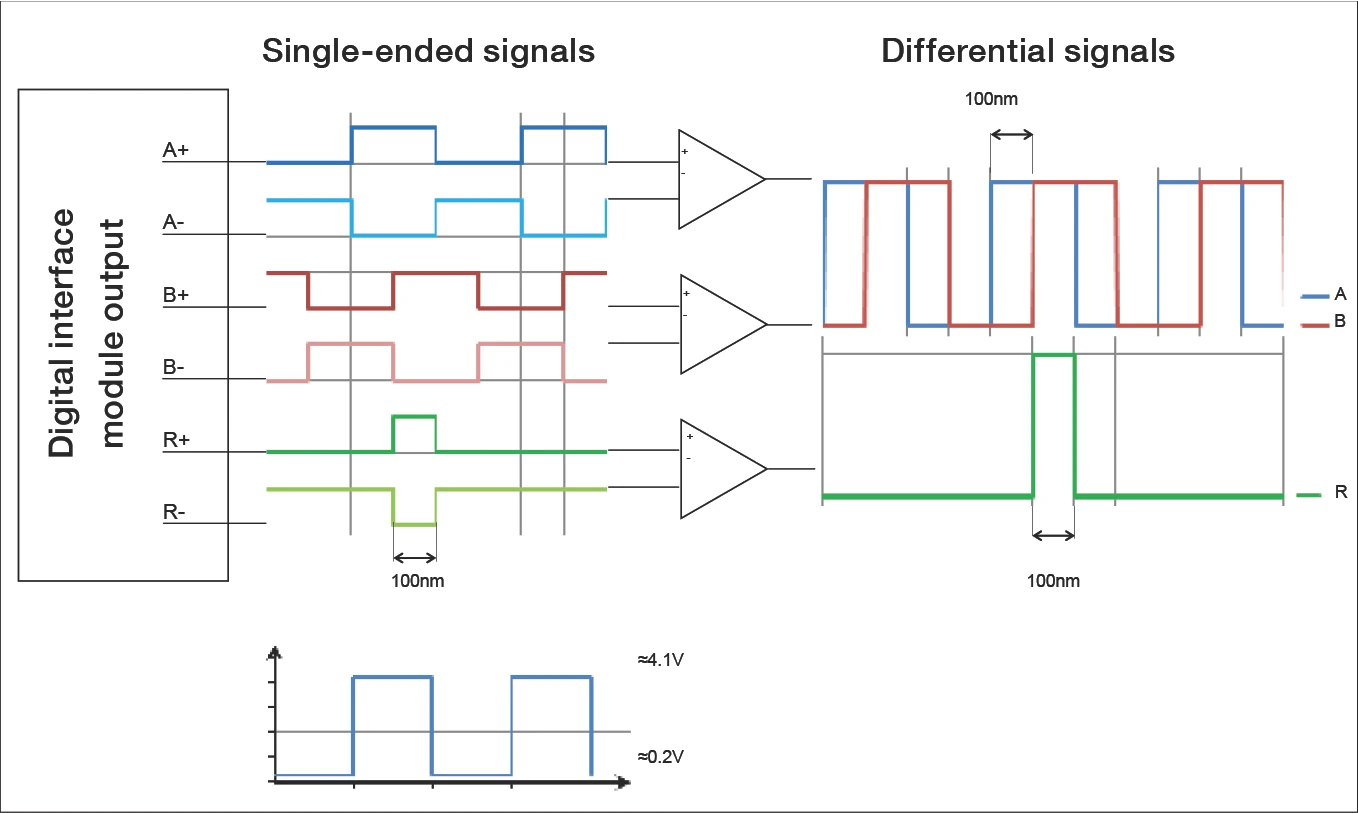
介面模組的數位輸出訊號。可以單端(參考接地)或差動方式使用。
RS 422 的匯流排終端電阻應為 120 歐姆。
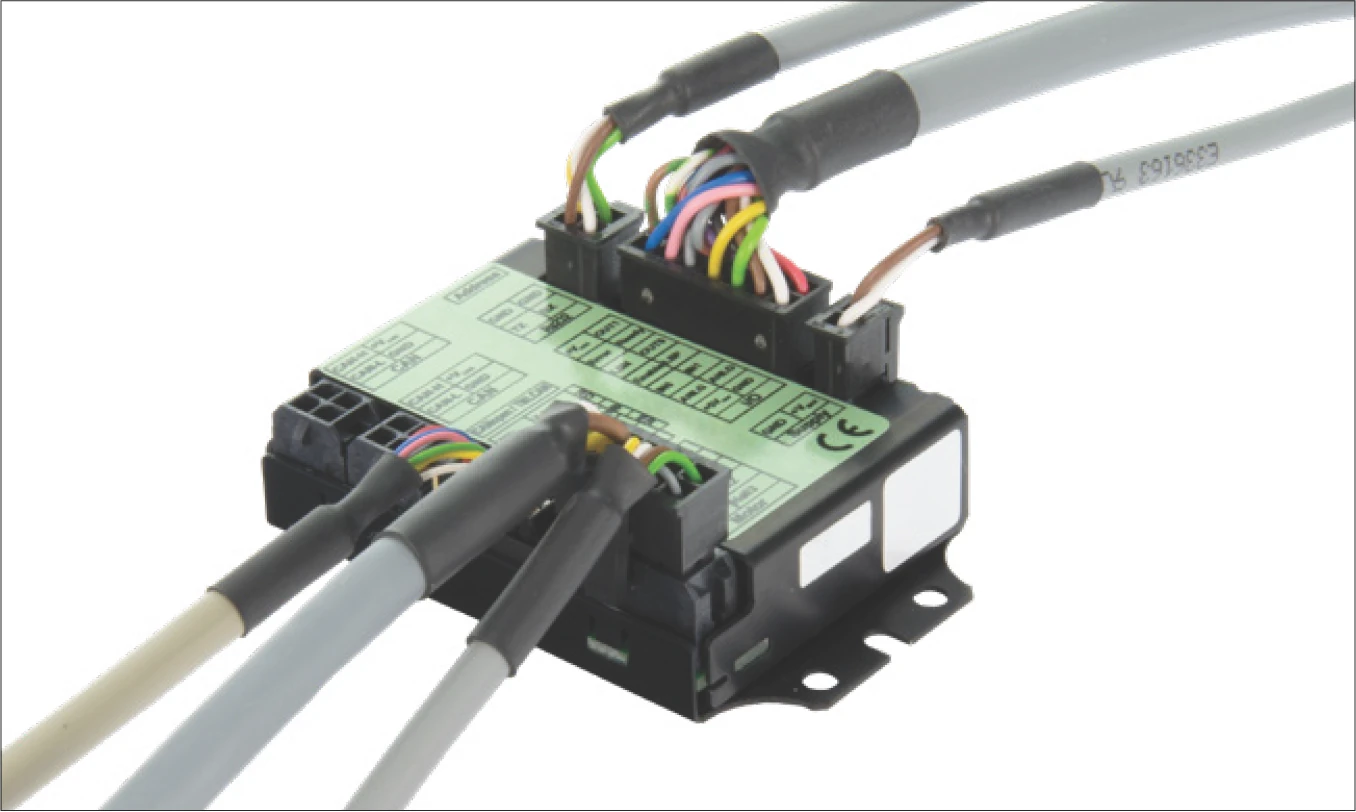
5.2 接腳定義
5.2.1 類比和數位介面模組
公型 9 腳 D-Sub 連接器或焊接端子:
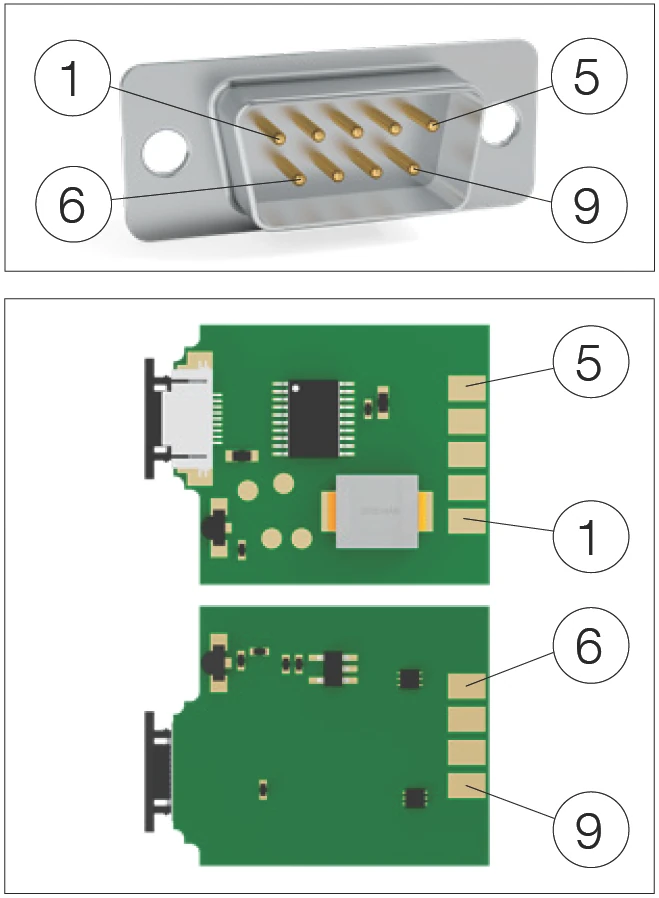
D-Sub 9 連接器腳位
| 接腳 | 類比訊號 | 數位訊號 | 說明 |
|---|---|---|---|
| 1 | Ua1- | A - | 正交訊號 |
| 2 | 0V | 0V | 接地 |
| 3 | Ua2- | B - | 正交訊號 |
| 4 | ERR NOT | ERR NOT | 錯誤訊號(Low = 錯誤) |
| 5 | Ua0 - | R - | 參考訊號 |
| 6 | Ua1 + | A + | 正交訊號 |
| 7 | + 5V DC | + 5V DC | 供電電壓 |
| 8 | Ua2 + | B + | 正交訊號 |
| 9 | Ua0 + | R + | 參考訊號 |
圖 1:介面模組 D-Sub 9 連接器的接腳連接
圖 2:帶焊接端子的介面模組接腳連接
公型 10 腳 Micro Match 連接器:
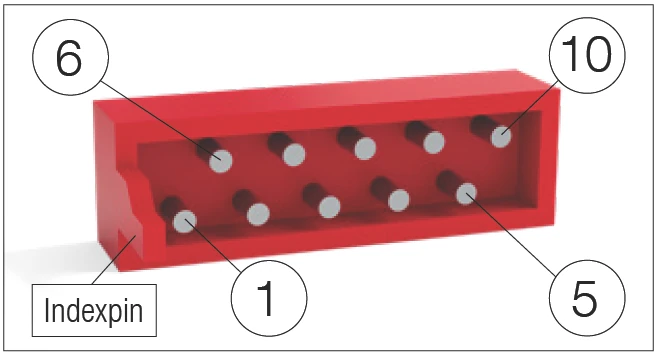
介面模組 Micro Match 連接器的接腳連接
| 接腳 | 類比訊號 | 數位訊號 | 說明 |
|---|---|---|---|
| 1 | nc | nc | |
| 2 | Ua1 + | A + | 正交訊號 |
| 3 | + 5V DC | + 5V DC | 供電電壓 |
| 4 | Ua2 + | B + | 正交訊號 |
| 5 | Ua0 + | R + | 參考訊號 |
| 6 | Ua1 - | A - | 正交訊號 |
| 7 | 0V | 0V | 接地 |
| 8 | Ua2 - | B - | 正交訊號 |
| 9 | ERR NOT | ERR NOT | 錯誤訊號(Low = 錯誤) |
| 10 | Ua0 - | R - | 參考訊號 |
5.2.2 感測排線
注意:此資訊僅與直接處理原始訊號因此不使用現有介面模組的客戶相關。
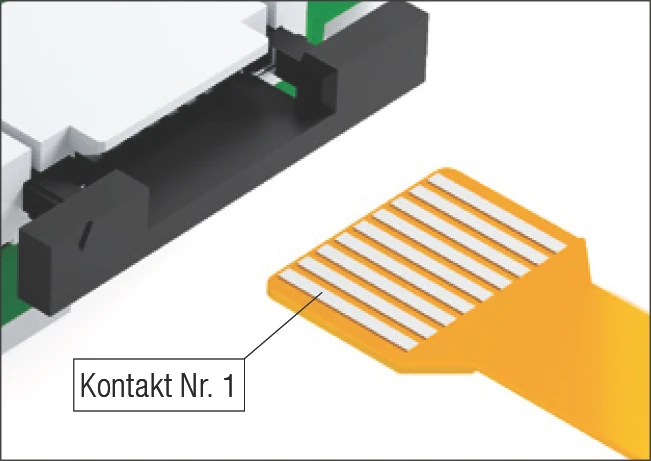
撓性感測排線的接腳連接
| 接腳 | 訊號 | 說明 |
|---|---|---|
| 1 | PZ | 原始訊號參考 |
| 2 | GND | 接地 |
| 3 | NZ | 原始訊號參考 |
| 4 | +5V DC | 供電電壓 |
| 5 | Diode | 光源供電 |
| 6 | PSIN | 原始正弦訊號 |
| 7 | NSIN | 原始正弦訊號 |
| 8 | PCOS | 原始餘弦訊號 |
| 9 | NCOS | 原始餘弦訊號 |
5.3 控制器
MINISLIDE MSQscale 與每個具有 1 Vpp 訊號(類比正弦/餘弦)增量編碼器埠或 RS-422 埠(數位 TTL)的控制器相容。MINISLIDE MSQscale 可連接到 RS-422 或 RS-485 編碼器輸入。
各主要控制器製造商提供合適的模組,包括 Siemens、Beckhoff、ACS 等。
對於簡單應用,可使用 USB 計數器(例如 Heilig & Schwab 的產品;請參見產品型錄第 5.2 節)將 MINISLIDE MSQscale 直接連接到 PC。
選擇控制器時必須考慮最大輸入頻率。根據行進速度和解析度,頻率可能高達 8 MHz。請參見第 6.4 節了解一些計算範例。
帶 1 Vpp 訊號或正交訊號編碼器埠的控制器
5.3.1 設定
類比訊號
類比訊號必須在客戶提供的設備中進行內插,以獲得適當的解析度。訊號週期對應 100 μm 的距離。
範例:訊號週期 100 μm,內插因子 250 和四邊緣評估,可得到 0.1 μm 的解析度。
數位訊號
驅動控制器中的步進大小必須根據所選解析度和邊緣評估類型進行配置。
MINISLIDE MSQscale 的標準解析度為 0.1 μm。解析度為 1 μm 或 10 μm 可作為選項訂購。
大多數控制器允許選擇邊緣評估類型。選項為四邊緣、二邊緣和單邊緣評估(參見第 6.3 節)。
5.4 功能檢查
如果 MINISLIDE MSQscale 正確供電,綠色 LED 將會亮起。
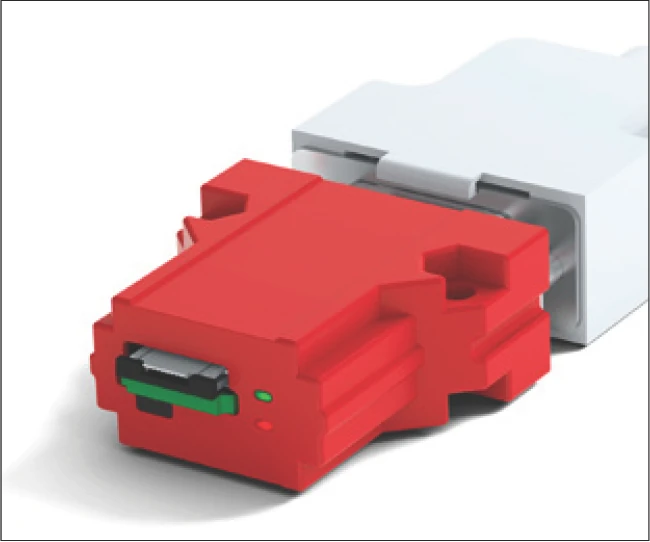
無 MINISLIDE MSQscale 撓性感測排線的介面模組。綠色和紅色 LED 均亮起。
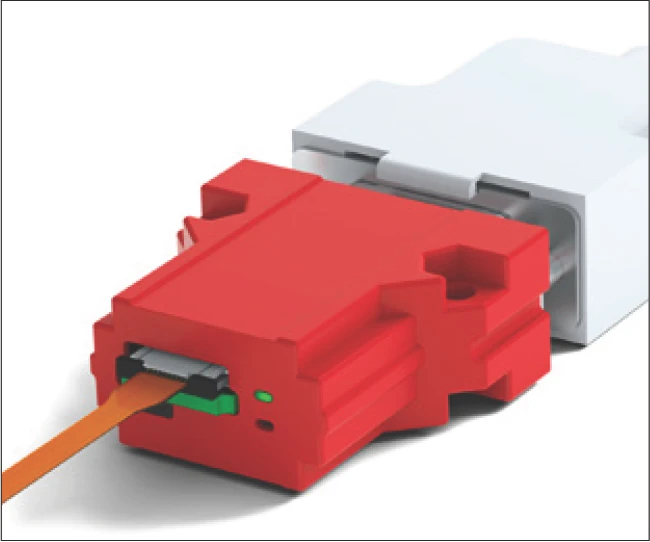
正確連接 MINISLIDE MSQscale 撓性感測排線的介面模組。綠色 LED 亮起。
如果滑塊在導軌上且儘管已插入撓性感測排線但 LED 仍亮紅色,應使用第 9.2 節「錯誤描述」的表格查找錯誤。
| LED | 未供電 | 已供電,正常運作 | 錯誤狀態 |
|---|---|---|---|
| 紅色 | 不亮 | 不亮 | 亮紅色 |
| 綠色 | 不亮 | 亮綠色 | 亮綠色 |
介面模組的狀態通過輸出(「ERR NOT」)以電子方式顯示。ERR NOT 是一個 5 伏特輸出(TTL 電位),其中「低訊號」=「待處理錯誤」,「高訊號」=「無錯誤」。
錯誤訊號應連接到高阻抗輸入。如果輸入阻抗過低,電流將流過紅色 LED,導致其發光。
6 技術原理
6.1 系統精度
6.1.1 系統精度
系統精度由長波偏差(尺度刻度的線性度)和掃描系統(感測器和介面模組)的短波偏差(如內插精度)組成。精度值參考室溫 20 °C(68 °F)。
長波偏差
尺度刻度的線性度涵蓋整個導軌長度。在此長度範圍內,相對於理想刻度,尺度刻度的偏差始終小於 +/- 3 μm。
短波偏差
所有增量式距離量測系統都受到週期偏差效應的影響。這種週期偏差,也稱為短波偏差,由於感測系統或電氣訊號處理中的微小偏差而產生。這意味著正弦和餘弦訊號偏離了數學上的精確形式。如果週期偏差僅在數位化和位置計算過程中發生,那麼我們稱之為內插誤差。
MINISLIDE MSQscale 的短波偏差始終在 +/- 0.6 μm 範圍內。
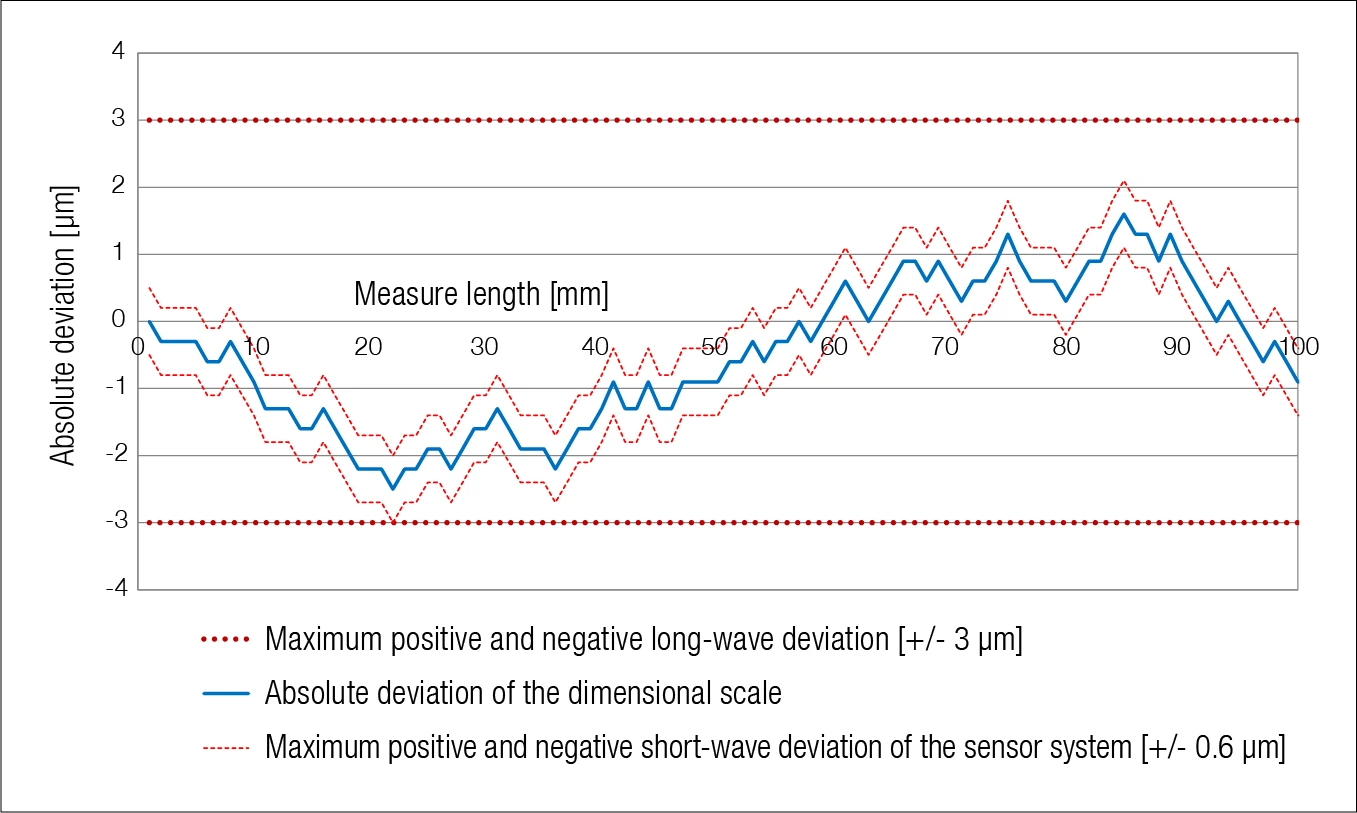
系統精度由長波偏差和短波偏差決定
每個系統都記錄了尺度刻度的線性度,可應客戶要求提供。記錄始終參考特定的導軌(參見導軌編號)。
6.2 內插
對於距離量測應用,內插意指將類比輸入訊號轉換為具有更小訊號週期的數位輸出訊號。這是必要的,因為計數讀數和/或位置讀數無法直接從類比訊號生成。
內插因子定義了類比輸入訊號到數位輸出訊號的訊號週期比。
內插過程的輸出是正交訊號,即兩個具有 90° 相位偏移的脈衝波形。解析度由正交訊號兩個邊緣之間的距離定義。
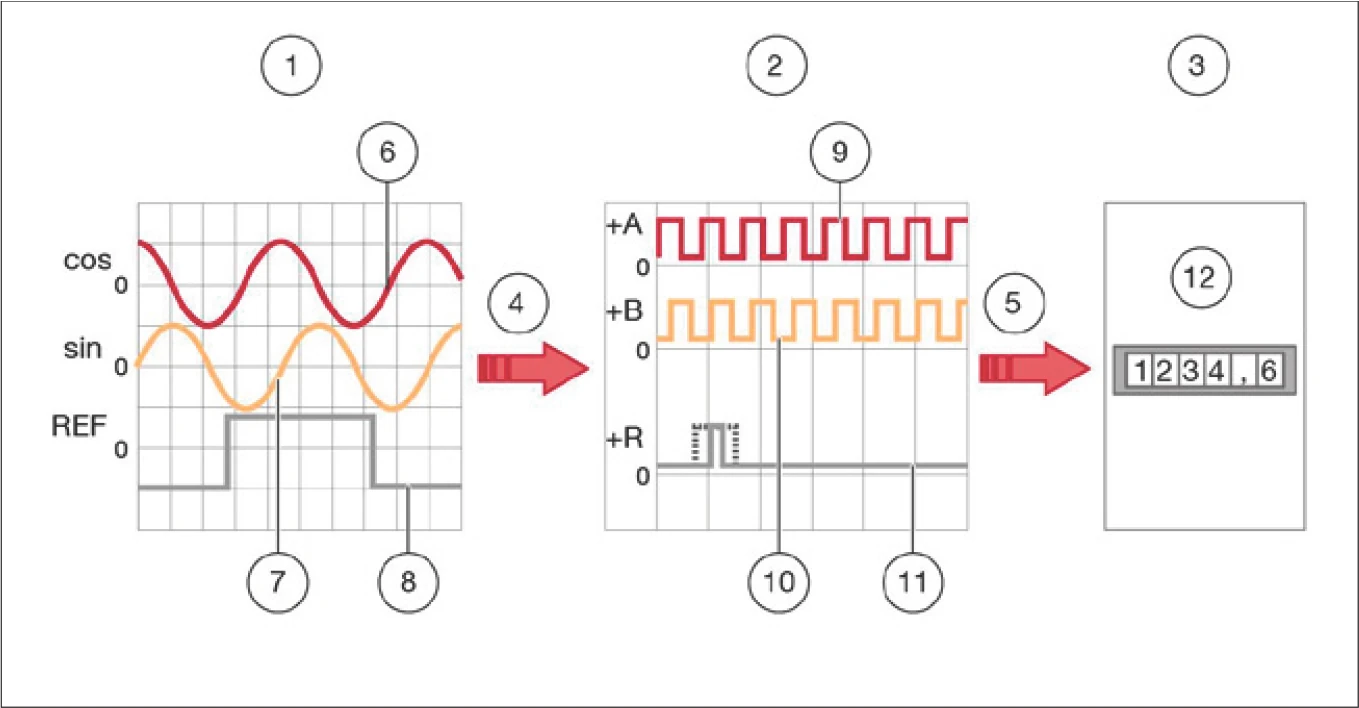
類比輸入訊號(sin、cos、REF)內插(紅色箭頭)為數位輸出訊號(+A、+B、+R)。反相訊號未表示:
1. 類比輸入訊號:sin、cos、REF
2. 數位輸出訊號:+A、+B、+Z
3. 下游電子設備
4. 內插
5. 訊號處理
6. 類比輸入訊號(cos)
7. 類比輸入訊號(sin)
8. 類比輸入訊號(REF)
9. 數位輸出訊號(+A)
10. 數位輸出訊號(+B)
11. 數位輸出訊號(+Z)
12. 量測計數器、PC、機器控制器等
6.3 數位訊號評估
數位訊號由兩個增量訊號 A 和 B 及參考訊號 R 組成,傳輸到下游電子設備。這可以是簡單的顯示單元、PC 或機器控制器。
下游電子設備通過計算訊號邊緣來確定位置值。計數方向由訊號 A 和 B 的相位關係決定。根據評估的邊緣數量,我們稱之為:
1. 單邊緣評估
每個通道僅計數一個邊緣。因此,一個量測步進對應一個數位訊號週期。
2. 二邊緣評估
計數一個通道的上升和下降邊緣。因此,一個量測步進對應數位訊號週期的一半。
3. 四邊緣評估
計數兩個通道的上升和下降邊緣。因此,一個量測步進對應數位訊號週期的四分之一。
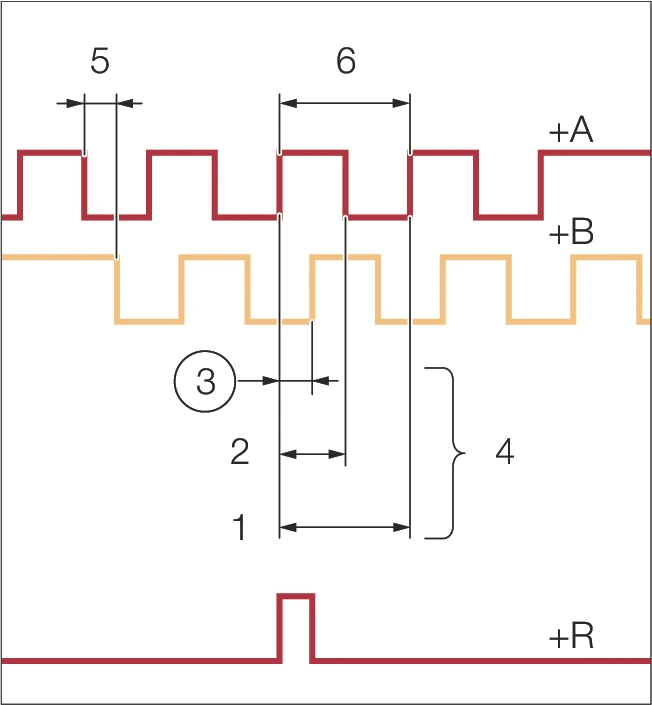
1. 單邊緣評估 2. 二邊緣評估 3. 四邊緣評估
4. 各情況下一個量測步進 5. 解析度 6. 數位訊號週期
6.3.1 解析度
解析度是量測系統可量測的最小位置變化。這對應正交訊號兩個邊緣之間的距離。解析度由類比訊號週期、內插因子和評估方式決定。
解析度計算範例 (A)
| I 內插因子(預設) | 250 |
| P 輸入訊號週期 | 100 μm |
| E 評估(4 邊緣) | 因子 = 4 |
A = PI × E = 100 μm250 × 4 = 0.1 μm
6.4 訊號頻率
介面模組輸出的訊號頻率取決於行進速度和解析度(數位模組)或尺度刻度的增量(類比模組)。為確保不遺漏步進,控制器的最大輸入頻率必須大於介面模組計算的最大輸出頻率。
f = vP
f = 頻率(Hz) v = 速度(m/s) P = 增量(m)
6.4.1 類比 MINISLIDE MSQscale 的計算範例
| v 行進速度 | 2 m/s |
| P 訊號週期(對應尺度刻度的增量) | 100 μm |
f = vP = 2 m/s100 × 10-6 m = 20,000 Hz = 20 kHz
6.4.2 數位 MINISLIDE MSQscale 的計算範例
數位介面模組的最大輸出頻率為每通道 8 MHz。這意味著 A 訊號和 B 訊號各自的最大頻率為 8 MHz。以 A/B 訊號的四邊緣評估,計數率為 32 MHz,對應解析度 0.1 μm 時的最大速度 3.2 m/s。
數位 MINISLIDE MSQscale 的最大效能
| v 最大速度 | 3.2 m/s |
| A 解析度 | 0.1 μm |
| P 數位訊號週期(4 × 解析度) | 0.4 μm |
介面模組最大輸出頻率(對應控制器所需的最小輸入頻率範圍)計算:
f = vP = 3.2 m/s0.4 × 10-6 m = 8,000,000 Hz = 8 MHz
最小所需控制器計數頻率(四邊緣評估)計算:
fcount = vA = 3.2 m/s0.1 × 10-6 m = 32,000,000 Hz = 32 MHz
速度 v 計算範例
反之,可從給定頻率(例如受所選控制器限制)計算速度或解析度。
| f 最大控制器輸入頻率 | 1 MHz |
| A 解析度 | 0.1 μm |
| P 數位訊號週期(4 × 解析度) | 0.4 μm |
Vmax = f × P = 1 MHz × 0.4 μm = 0.4 m/s