產業需求 | Requirements
自動化與機器人的驅動挑戰Drive challenges in automation & robotics
旋轉關節、搬運軸與取放模組對扭矩、動態、整合度與可靠性有不同需求。
旋轉關節需足夠扭矩Sufficient Torque for Rotary Joints
扭矩馬達 / RDDS
機器人運動學的旋轉關節與轉台需要足夠的扭矩與剛性。應採用扭矩馬達(RKI、RMK/RMF)或整合式 RDDS 子系統;印刷電路板式的 UPR 出力較低,僅適合輕量、低慣量的旋轉軸,不作為高負載關節驅動。
即用型整合模組Ready-to-Use Integration
RDDS:robot kinematics
機構整合複雜、開發時程緊。RDDS 將馬達、軸承、量測與冷卻整合為即用模組,官方應用即包含機器人運動學(robot kinematics)與自動化搬運軸(handling axes),大幅減少組裝、調整與維護工作。
高速取放週期High-Speed Pick & Place
Z 軸加速達 1,000 m/s²
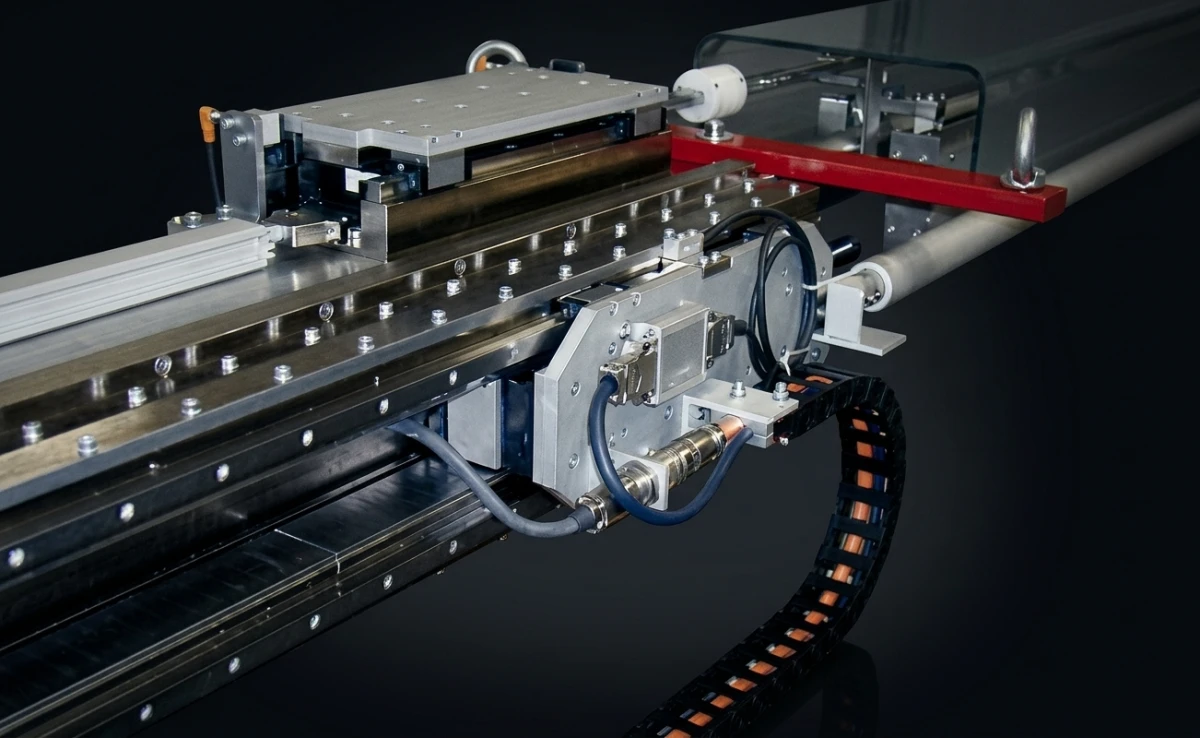
取放與搬運追求最高產能。線性馬達高動態驅動水平軸,Z 軸短行程致動器作快速垂直軸,RDDS 作 Pick & Place 定位轉台,三者構成高速、高重複性的取放模組。
免維護高可靠Maintenance-Free & Reliable
無背隙・低磨耗
自動化產線要求長期不停機運行。直驅無接觸磨耗、免維護,RDDS 無背隙、低磨耗,確保搬運與取放在高節拍下的長期穩定可靠。
Schaeffler 解決方案 | Solutions
自動化與機器人直驅方案Direct drive solutions for automation & robotics
RDDS 子系統作旋轉軸與搬運軸,扭矩馬達作旋轉關節,線性 + Z 軸作高速取放。

RDDS 旋轉直驅子系統Rotary Direct Drive Systems
整合扭矩馬達、精密軸承、量測與冷卻的即用型旋轉模組。官方應用涵蓋機器人運動學、自動化搬運軸、Pick & Place 定位轉台與測試台,服務自動化產業。RDDS-20-B 為高度整合的即用型單機。
- RDDS1 Ø130 – 230、RDDS2 Ø240 – 565 mm
- 無背隙、高剛性、運轉平穩、易於組裝
- 官方應用:robot kinematics、handling axes、pick & place

扭矩馬達(旋轉關節 / 轉台)Torque Motors for Rotary Joints
RKI 高性能內轉式馬達在安裝空間內提供最大扭矩,適用快速旋轉軸與轉台;RMK/RMF 無槽鐵芯馬達運動極均勻,適合高精度旋轉定位。兩者直接驅動旋轉關節與分度軸,零齒隙、免維護。
- RKI 峰值扭矩 88 – 17,670 Nm
- RMK/RMF 直徑 70 – 2,500 mm,扭矩 2 – 15,000 Nm
- 零齒隙、優異同步特性
應用案例 | Application Cases
自動化與機器人的典型應用場景Typical applications in automation & robotics
機器人運動學、搬運軸與 Pick & Place 定位轉台對應 RDDS 官方自動化應用。

機器人運動學 | Robot Kinematics
機器人運動學與自動化單元
機器人運動學的旋轉軸需要高扭矩、無背隙的直接驅動。RDDS 旋轉直驅子系統官方應用即包含機器人運動學(robot kinematics)與自動化搬運軸,整合式即用模組減少組裝與維護工作。

協作機器人 | Collaborative Robots
協作機器人關節直驅
協作機器人(cobot)的關節要求零齒隙、運轉極平穩、結構緊湊與精準的力控與反向驅動性。框架式(frameless)無槽鐵芯扭矩馬達 RMK/RMF 運動極均勻、無齒槽、低慣量,可作為協作機器人關節的直驅方案,消除減速機間隙、提升力控精度與安全互動性。
直角座標機器人 | Cartesian Robots
高速直角座標機器人系統
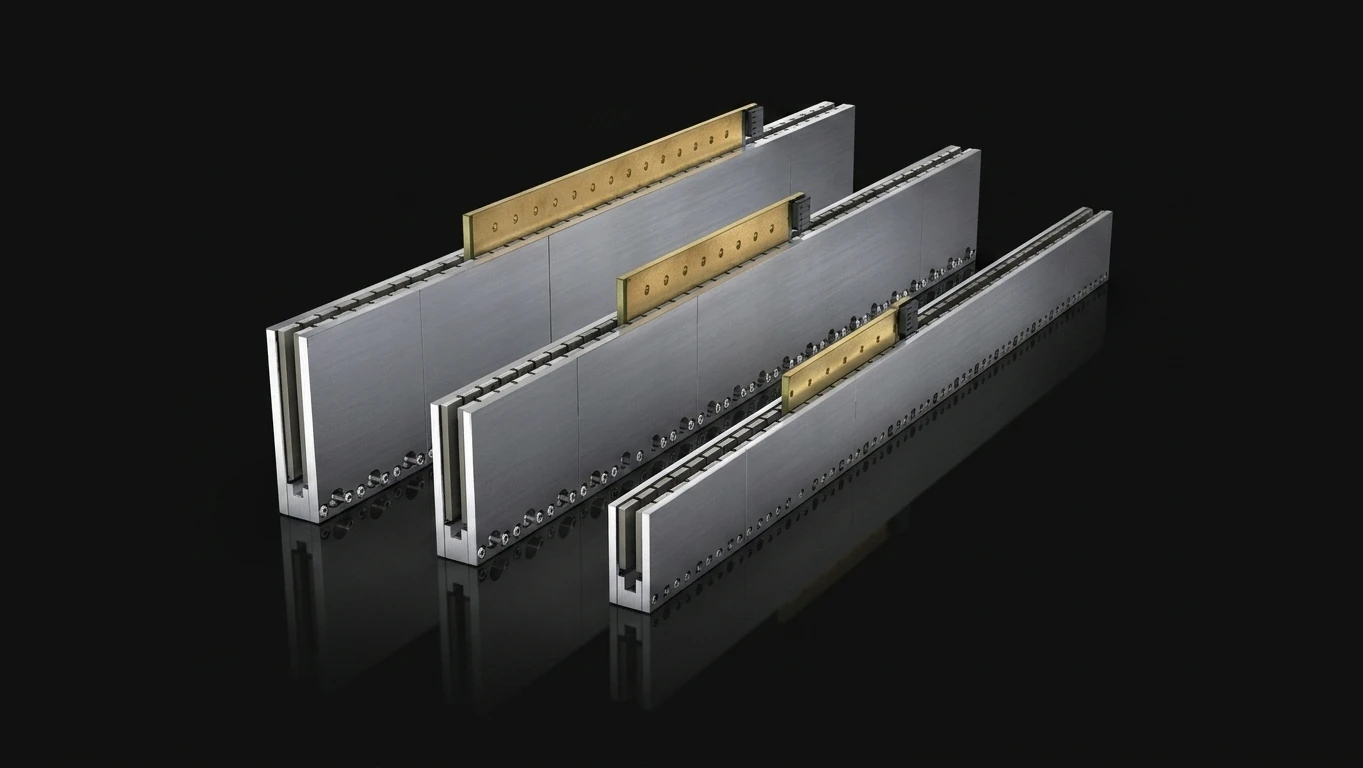
直角座標(cartesian/gantry)機器人以線性馬達取代滾珠螺桿驅動 XYZ 軸,達成更高速度、更高加速與更長壽命(無接觸磨耗傳動)。UPLplus 無鐵芯與 L1 有鐵芯線性馬達提供高動態、零齒隙的直線定位,搭配 Z 軸短行程致動器(LDDS)作快速垂直軸,大幅提升取放與搬運節拍。
需要自動化與機器人直驅方案?
我們的應用工程師團隊隨時為您提供技術諮詢與產品選型建議