1.1 公式符号图例(Legend of symbols used in formulas)
说明
下表列出本章公式与图表中使用的所有符号、单位与说明,共 58 笔。
| 符号 | 单位 | 说明 |
|---|---|---|
| I | A | 马达电流(Motor current) |
| Ic eff | A | 有效连续电流,无冷却(Effective continuous current, not cooled) |
| Ic red | A | 降额连续电流(Reduced continuous current) |
| Icw eff | A | 有效连续电流,冷却(Effective continuous current, cooled) |
| Icw2 eff | A | 高转速连续运转之有效连续电流(Effective continuous current for higher speeds in continuous operation) |
| Ip eff | A | 有效峰值电流(Effective peak current) |
| Ipl eff | A | 有效峰值电流,线性区(Effective peak current, linear range) |
| Iu eff | A | 有效极限电流(Effective ultimate current) |
| J | kg·m² | 惯性矩(Mass moment of inertia) |
| km | Nm/√W | 扭矩马达的电机常数(Motor constant for torque motors) |
| kT | Nm/A | 扭矩常数(Torque constant) |
| n | min⁻¹ | 转速(Speed) |
| nlc | min⁻¹ | Ic eff 与 UDCL 下的极限转速(Limiting speed at Ic eff and UDCL) |
| nlp | min⁻¹ | Ip eff 与 UDCL 下的极限转速(Limiting speed at Ip eff and UDCL) |
| nlw | min⁻¹ | 拐点转速(Knee speed) |
| nlw2 | min⁻¹ | Icw2 eff 与 UDCL 下的运转转速 FS(Operating speed FS at Icw2 eff and UDCL) |
| nlw3 | min⁻¹ | 连续运转中 Icw2 eff 与 UDCL 下的极限转速(Limiting speed at Icw2 eff and UDCL in continuous operation) |
| nlwS1 | min⁻¹ | 额定转速 S1,冷却(Rated speed S1, cooled) |
| nmax | min⁻¹ | 最大转速(Max. speed) |
| Pl | W | 功率损耗(Power loss) |
| Pmax S1 | N | 最大额定功率(Maximum rated power) |
| R | Ω | 欧姆电阻(Ohmic resistance) |
| t | s | 时间(Time) |
| T | Nm | 扭矩(Torque) |
| tb | s | 暂停时间(Pause time) |
| Tc | Nm | 连续扭矩,无冷却(Continuous torque, not cooled) |
| Tcw | Nm | 连续扭矩,冷却(Continuous torque, cooled) |
| Tcw2 | Nm | Icw2 eff 与 nlw2 下的扭矩(Torque at Icw2 eff and nlw2) |
| Tcw3 | Nm | Icw2 eff 与 nlw3 下的扭矩(Torque at Icw2 eff and nlw3) |
| Teff | Nm | 有效扭矩(Effective torque) |
| TF | Nm | 轴承摩擦扭矩(Bearing frictional torque) |
| tm | s | 运动时间(Movement time) |
| Tmax | Nm | 最大扭矩(Max. torque) |
| Tp | Nm | 峰值扭矩(Peak torque) |
| Tpl | Nm | 峰值扭矩,线性区(Peak torque, linear range) |
| Tsafe eff | Nm | 含安全系数之有效扭矩(Effective torque, incl. safety factor) |
| Tsafe max | Nm | 含安全系数之最大扭矩(Max. torque, incl. safety factor) |
| Tsw | Nm | 零速扭矩,冷却(Stall torque, cooled) |
| Tu | Nm | 极限扭矩(Ultimate torque) |
| TW | Nm | 加工扭矩(Processing torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
| UDCL | V | 直流汇流排电压(DC link voltage) |
| α | rad/s² | 角加速度(Angular acceleration) |
| αmax | rad/s² | 最大角加速度(Max. angular acceleration) |
| αS1 | rad/s² | S1 运转之角加速度(Angular acceleration in S1 operation) |
| ϑ | °C | 温度(Temperature) |
| ϑf | °C | 当前进水温度(Current feed temperature) |
| ϑmax | °C | 最大允许绕组温度(Max. permissible winding temperature) |
| ϑn | °C | 标称响应温度(Nominal response temperature) |
| ϑnf | °C | 标称进水温度(Nominal feed temperature) |
| φ | ° | 运动角度(Movement angle) |
| ω | rad/s | 角速度(Angular velocity) |
| ωmax | rad/s | 最大角速度(Max. angular velocity) |
1.2 扭矩马达的优势(Advantages of torque motors)
1.2.1 性能(Performance capability)
运动曲线无需转换
传动链中没有因传动或联轴器元件造成的弹性、间隙、摩擦或迟滞。
多极马达
多极设计可产生极高的扭矩。这些扭矩可从转速 > 0 起一直运用到额定转速。
薄型环状转子
薄型、环状的设计搭配大型自由内径,可降低马达惯性并达成高加速率。
直接位置测量
借由直接位置测量与刚度的机械结构,可实现高精度、高动态的定位作业。
控制器相容性
Schaeffler Industrial Drives 的扭矩马达可搭配市场上所有常见的伺服驱动器运转。
1.2.2 营运成本(Operating costs)
无额外运动零件
由于没有额外的运动零件,传动单元的组装、调整与预防性维护更为容易。
传动链磨损极低
即使在极高的交变负载下,传动链仍极为耐用。低磨损可减少机台停机时间。
高可用度
除了寿命提升与磨损降低之外,扭矩马达稳固的设计亦提升了整台机器的可用度。
能源效率
热量降至最低,以节省伺服驱动器与冷却器的能源消耗。
1.2.3 设计(Design)
空心轴
大直径的空心轴可整合或让其他组件通过,例如轴、旋转分配器与介质管路。轴承位置、力的产生与有效作用区域皆可彼此紧邻配置。
定子(定子)的安装
由于空间需求小,定子环可轻易整合到机器结构中。
低断面高度
大型、自由的内径使得高扭矩、高度紧凑且轴向短的结构成为可能。
零件数少
高度工程化的设计使马达组件更易于整合到机器组装中。零件数量少且设计稳固,可降低故障率并提升平均故障间隔时间。
1.3 扭矩马达的特性(Characteristics of torque motors)
扭矩马达由定子(primary part)与转子(secondary part)组成。定子包含主动线圈系统;转子包含永磁系统。在同心配置中,转子可为内环(内转子马达),亦可为外环(外转子马达)。通电的定子会因电磁力而产生作用于转子的力。
轴承维持定子与转子之间的气隙。此外,亦需要量测系统来侦测转子位置。由于应用需求范围广泛,马达系列已发展出多样化的定子与转子组合。
就结构设计而言,扭矩马达基本上可分为含或不含叠片铁芯的马达,或无铁芯马达。进一步的区分包括转子的位置与配置(内转子或外转子),或依磁体系统而分。例如磁体可如 RIB 系列那样黏贴于钢环表面;或者整合于叠片铁芯中——亦称为埋入式磁体(buried magnets)——如 RKIB 系列。这些马达在宽广的转速范围内可产生持续的高扭矩。扭矩由定子与转子之间的主动气隙面积以及结构决定。设计者必须依功率需求选择马达组件。传统电动马达依功率分类;相对地,扭矩马达依所需扭矩分类。
表 1:扭矩马达特性
| 马达系列 | 特性 |
|---|---|
| RIB |
高扭矩密度的内转式马达(Internal running motor with high torque density)
|
| RKI 与 RKIB |
高功率密度的内转式马达(Internal running motor with high power density)
|
1.4 一般马达特性值(General motor characteristic values)
1.4.1 效率准则(Efficiency criteria)
扭矩马达的功率损耗依绕组与尺寸列于性能资料中。虽然扭矩马达在静止时可产生高扭矩,但并不输出任何机械功率,因此没有理由标示效率。
不过,电机常数 km 可用于效率比较。电机常数 km 定义扭矩与产生此扭矩时所产生的铜损之间的关系。功率损耗会使马达升温。此外,电机常数 km 在静止状态、低转速以及室温下的线性控制范围内是准确的。
当马达受温度上升影响时,由于绕组电阻增加,其效率会下降。对于极变频率 100 Hz 或更高的转速,铜损会加上以频率相依的迟滞损与涡流损形式出现的铁损。虽然铁损未纳入电机常数 km 中,但在极限转速范围内仍具相关性,因此应加以注意。电机常数 km 仅与扭矩–电流特性曲线的线性区有关。
公式 1:功率损耗(Power loss)
Pl = ( T / km )2
| 符号 | 单位 | 说明 |
|---|---|---|
| Pl | W | 功率损耗(Power loss) |
| T | Nm | 扭矩(Torque) |
| km | Nm/√W | 电机常数(Motor constant) |
电机常数 km 取决于欧姆电阻,因此也取决于马达绕组温度。性能资料中标示的电机常数 km 是 +20 °C 时的值。特性曲线显示电机常数随温度变化的函数。
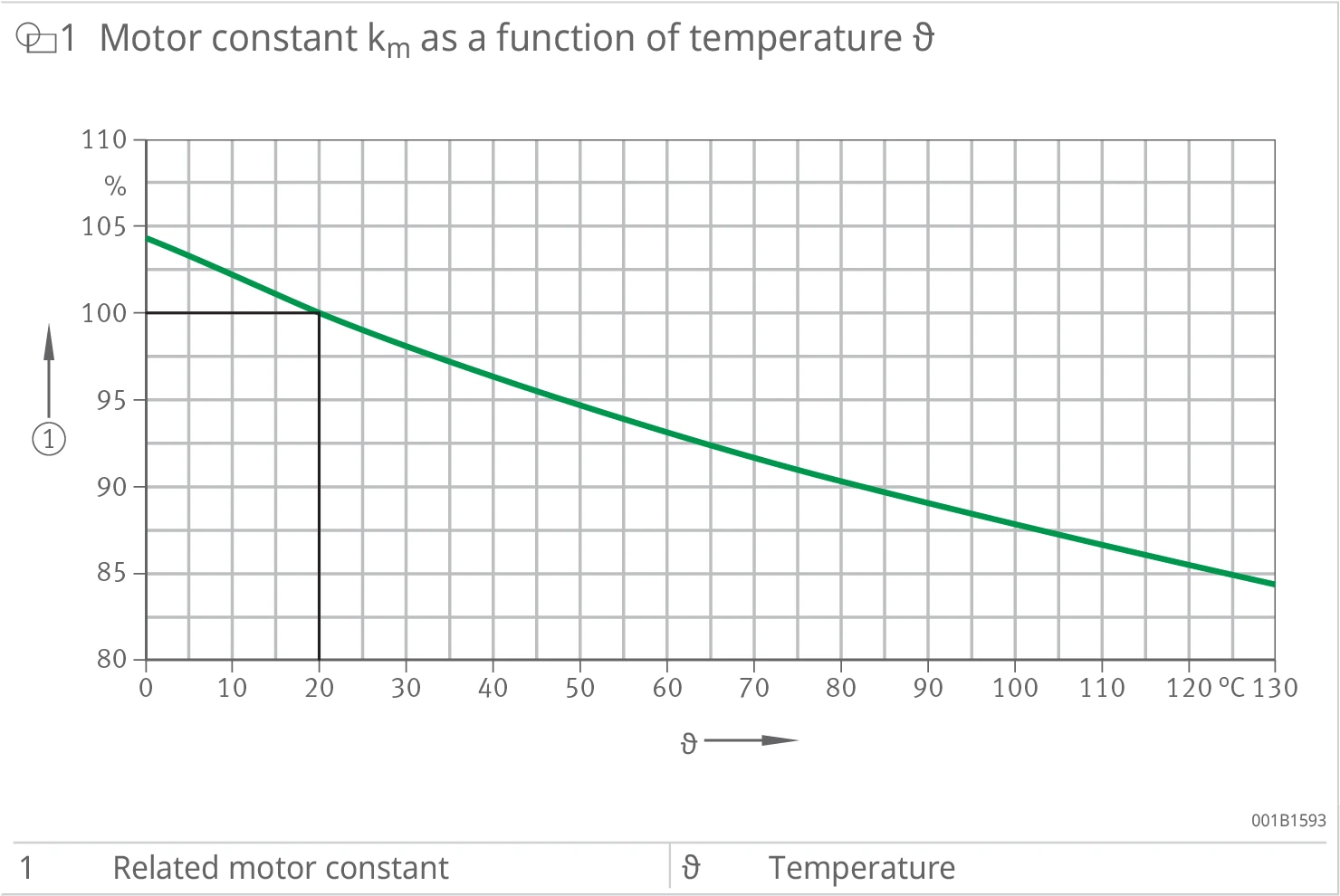
图 1:电机常数 km 随温度 ϑ 变化的函数。纵轴为相对电机常数(%),横轴为温度 ϑ(°C)。曲线于 +20 °C 为 100%,随温度上升而下降,+130 °C 时约降至 84%。①=相对电机常数,ϑ=温度。
热行为(Thermal behaviour)
温度上升会使绕组电阻增加,从而降低电机常数 km。在 +130 °C 时,电机常数 km 降至其正常值的 0.84 倍。在产生扭矩的固定电流下,受热马达的功率损耗会比冷马达更高,此功率损耗进一步使马达温度上升。
1.4.2 绕组设计与相依性(Winding designs and dependencies)
首要而言,系列决定扭矩马达的极限转速。可能的设计如下:
- RIB 扭矩马达:定子为叠片铁芯。转子的磁体黏贴于钢环上。
- RKI 扭矩马达与 RKIB 扭矩马达:定子为叠片铁芯。转子的磁体整合于叠片铁芯中。
在同一系列内,尺寸、直流汇流排电压与绕组设计皆会影响极限转速。
马达内部的电压降会随转速增加而提高电压需求。在性能资料所指定的拐点转速下,电压需求等于采用磁场导向控制(field-oriented control)的伺服转换器的直流汇流排电压,超过此转速后转速便会快速下降。直流汇流排电压愈高、且与绕组相关的电压常数 kû 愈小,可达成的极限转速便愈高。由于电压常数与扭矩常数之间存在相关性,在相同扭矩下,较高的转速需求会提高马达的功率需求。在固定直流汇流排电压 UDCL 下,会为不同的极限转速与动态需求预先定义一种或多种标准绕组。
1.4.2.1 直流汇流排电压的变化(Change in DC link voltage)
直流汇流排电压会影响绕组特定的转速限制。若直流汇流排电压变化在最大 ±10 % 之内,则可在马达预选阶段假设直流汇流排电压与转速限制之间成正比。客户特定直流汇流排电压的精确转速限制,可透过 Schaeffler Industrial Drives 的应用工程师及业务部门取得。
在较低的直流汇流排电压下,极限转速会降低。扭矩–电流特性曲线显示不同运转点下的扭矩。扭矩–转速特性曲线显示各运转点下扭矩与转速之间的关系。
扭矩–转速曲线可透过 Schaeffler Industrial Drives 的应用工程师及业务部门以资料表形式取得。联络方式:sales-sid@schaeffler.com
1.4.3 扭矩/转速特性曲线(Torque/speed characteristic curve)
RIB 扭矩马达
RIB 扭矩马达的扭矩–转速特性曲线显示在固定直流汇流排电压、无磁场弱化的条件下,绕组特定转速限制随扭矩变化的函数。此特性曲线并不描述工作周期与相关的热行为。特性曲线仅代表马达在绕组温度 +20 °C 下可达到的范围。
扭矩超过 Tcw 的运转点受时间限制,以保护定子免于过热。在 Tu 时,过高的转子输出温度可能导致退磁。
在 n > nlwS1 时,由于额外的时间限制,马达仅能运转特定时间。或者,可降低电流以进行连续运转。额定转速(S1,冷却)nlwS1 也可依马达尺寸与绕组设计等于 nlw。
Ic eff 与 Tc 下的极限转速 nlc 对于理解特性曲线很重要,但由于其相关性较小,并未列于性能资料中。
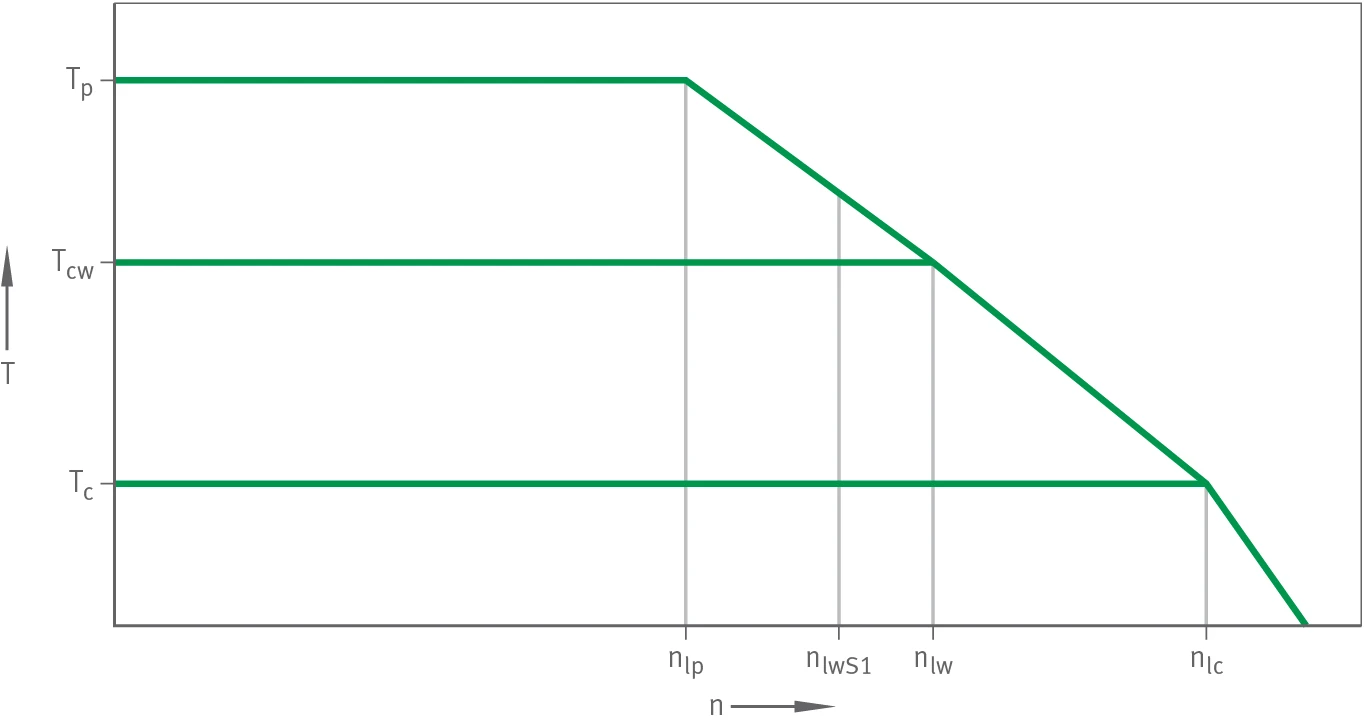
图 2:RIB 扭矩马达扭矩–转速特性曲线。纵轴为扭矩 T,横轴为转速 n。曲线显示 Tp、Tcw、Tc 三个扭矩水平与对应的转速限制 nlp、nlwS1、nlw、nlc。符号定义:T=扭矩、n=转速、Tc=连续扭矩(无冷却)、Tcw=连续扭矩(冷却)、Tp=峰值扭矩、nlc=Ic eff 与 UDCL 下的极限转速、nlp=Ip eff 与 UDCL 下的极限转速、nlw=拐点转速、nlwS1=额定转速 S1(冷却)。
RKI 扭矩马达与 RKIB 扭矩马达
连续转速的扭矩–转速特性曲线显示在高转速、固定直流汇流排电压并含磁场弱化(field weakening)的条件下,绕组特定转速限制随扭矩变化的函数。RKI 扭矩马达与 RKIB 扭矩马达可在特性曲线所示的运转点连续运转。
在连续扭矩 Tcw 下可运转至转速 nlwS1。在更高的转速直到 nlw2 之间,连续运转需要将电流从 Icw eff 降至 Icw2 eff,对应的扭矩为 Tcw2。
在 nlw2 与 nlw3 之间,最大允许连续电流亦为 Icw2 eff。对应的扭矩变化取决于绕组与转子配置。在 nlw3 与 Icw2 eff 时,对应的扭矩为 Tcw3。此运转点的机械功率为 Pmax S1。nlw2 与 nlw3 之间的精确变化只能在产品特定资料表中查得,须向 Schaeffler Industrial Drives 索取。
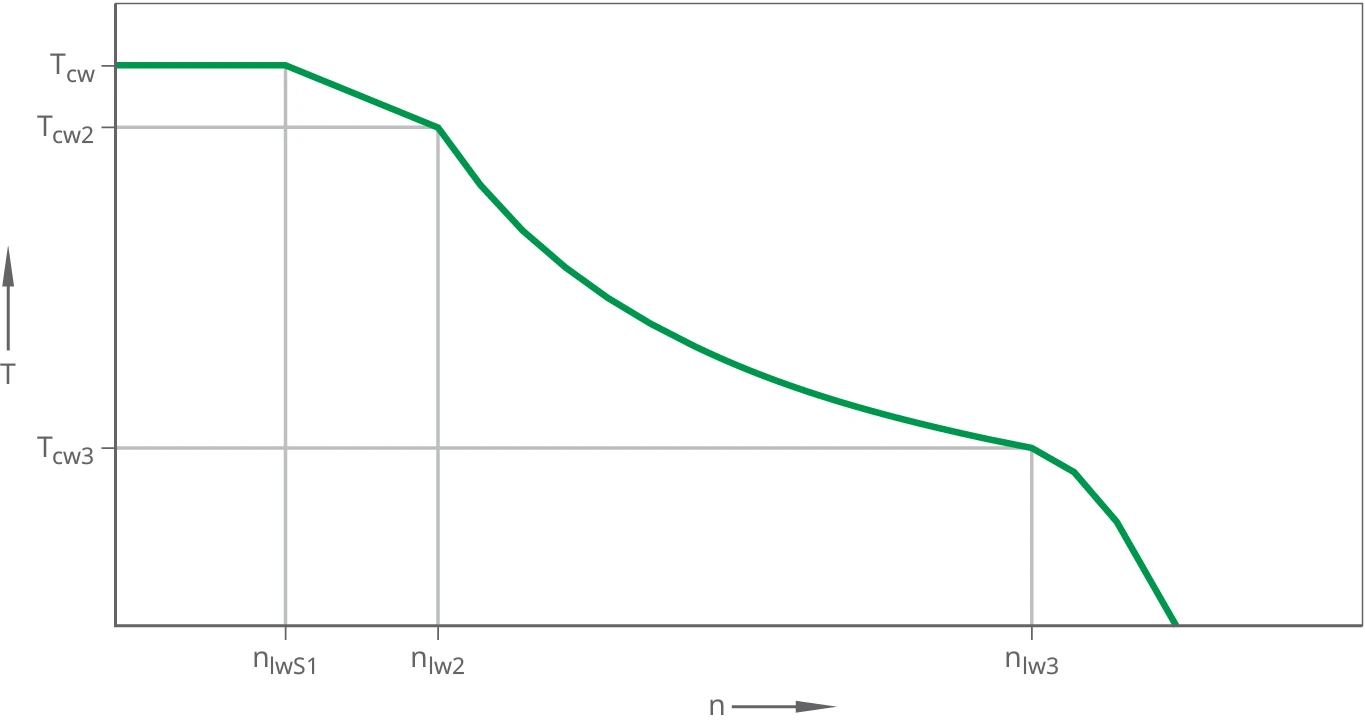
图 3:RKIB 扭矩马达连续转速的扭矩–转速特性曲线。纵轴为扭矩 T,横轴为转速 n。曲线显示 Tcw、Tcw2、Tcw3 与对应转速限制 nlwS1、nlw2、nlw3。符号定义:n=转速、T=扭矩、Tcw=连续扭矩(冷却)、Tcw2=Icw2 eff 与 nlw2 下的扭矩、Tcw3=Icw2 eff 与 nlw3 下的扭矩、nlwS1=额定转速 S1(冷却)、nlw2=Icw2 eff 与 UDCL 下的运转转速 FS、nlw3=连续运转中 Icw2 eff 与 UDCL 下的极限转速。
控制储备(Control reserve):所有指定转速皆与固定的直流汇流排电压 UDCL 相关。若使用未稳定化直流汇流排的变频器,UDCL 并非定值。因此运转点必须依直流汇流排电压波动预留控制储备。通常在使用未稳定化直流汇流排的变频器时,运转点转速不应超过该运转点马达可能转速的约 80 %。
1.4.4 扭矩/电流特性曲线(Torque/current characteristic curve)
在 0 A 与线性峰值电流 Ipl eff 之间范围内的马达电流会产生线性相依的扭矩。峰值电流 Ipl eff 产生线性峰值扭矩 Tpl。电机常数 km 适用于计算 0 A 与 Ipl eff 之间范围的功率损耗。扭矩常数 kT 用于在此范围内依电流计算扭矩,或反之。
线性峰值电流 Ipl eff 的值与温度无关。其值取决于系列与绕组设计,可能低于或高于冷却连续电流 Icw eff 的值。线性峰值电流 Ipl eff 与相关的线性峰值扭矩 Tpl 对于理解特性曲线很重要。不过,由于这些值的实际相关性甚低,并未列于性能资料中。
在 I > Ip eff 时,扭矩–电流特性曲线不再为线性。马达磁路的饱和造成此非线性。在 Ip eff 的扭矩–电流点 Tp 与 Iu eff 的 Tu 之间,特性曲线变为非线性。在此范围内,曲线的斜率为可变,且明显低于扭矩常数 kT 的值。
马达可在运转点 Tp、Ip eff 运转数秒。这是加速程序的最大运转点。由于永磁体有退磁的风险,马达不得超过极限点 Tu、Iu eff 运转。
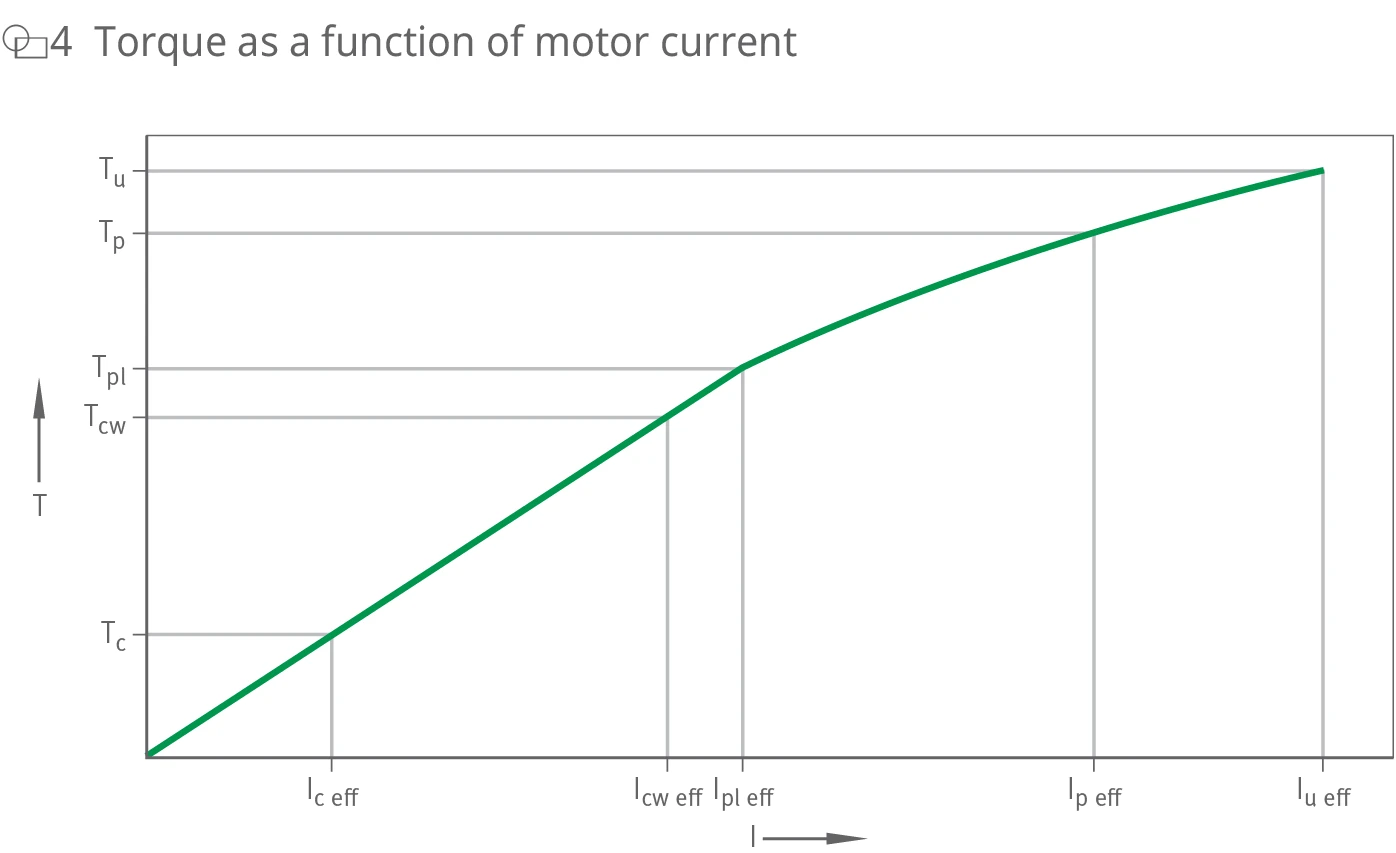
图 4:扭矩随马达电流变化的函数。纵轴为扭矩 T,横轴为马达电流 I。曲线在 0 至 Ip eff 之间为线性,超过后因磁饱和而呈非线性,至 Tu、Iu eff 为止。标示扭矩水平 Tc、Tcw、Tpl、Tp、Tu 与电流点 Ic eff、Icw eff、Ipl eff、Ip eff、Iu eff。
1.5 热保护(Thermal motor protection)
1.5.1 监控回路 I 与 II(Monitoring circuits I and II)
使用者经常在热性能极限下运转直驱马达。此外,运转中可能发生无法预期的过载。过载会造成高于允许连续电流的电流负载。在过载事件中,有效马达电流(即均方根值 I²t)不得超过允许的连续马达电流。对于短时过电流,电力电子装置必须具备 I²t 马达保护模型来控制马达电流。此间接温度监控非常快速且可靠。在马达试车期间,使用者必须确保 I²t 监控已开启。
Schaeffler Industrial Drives 的马达必须透过马达温度监控加以保护。标准版本的监控回路 I 含 3 个串联于三相绕组上的 PTC 感测器。监控回路 II 另含一个位于马达一相上的 Pt1000 感测器。此感测器可提供预警门槛。
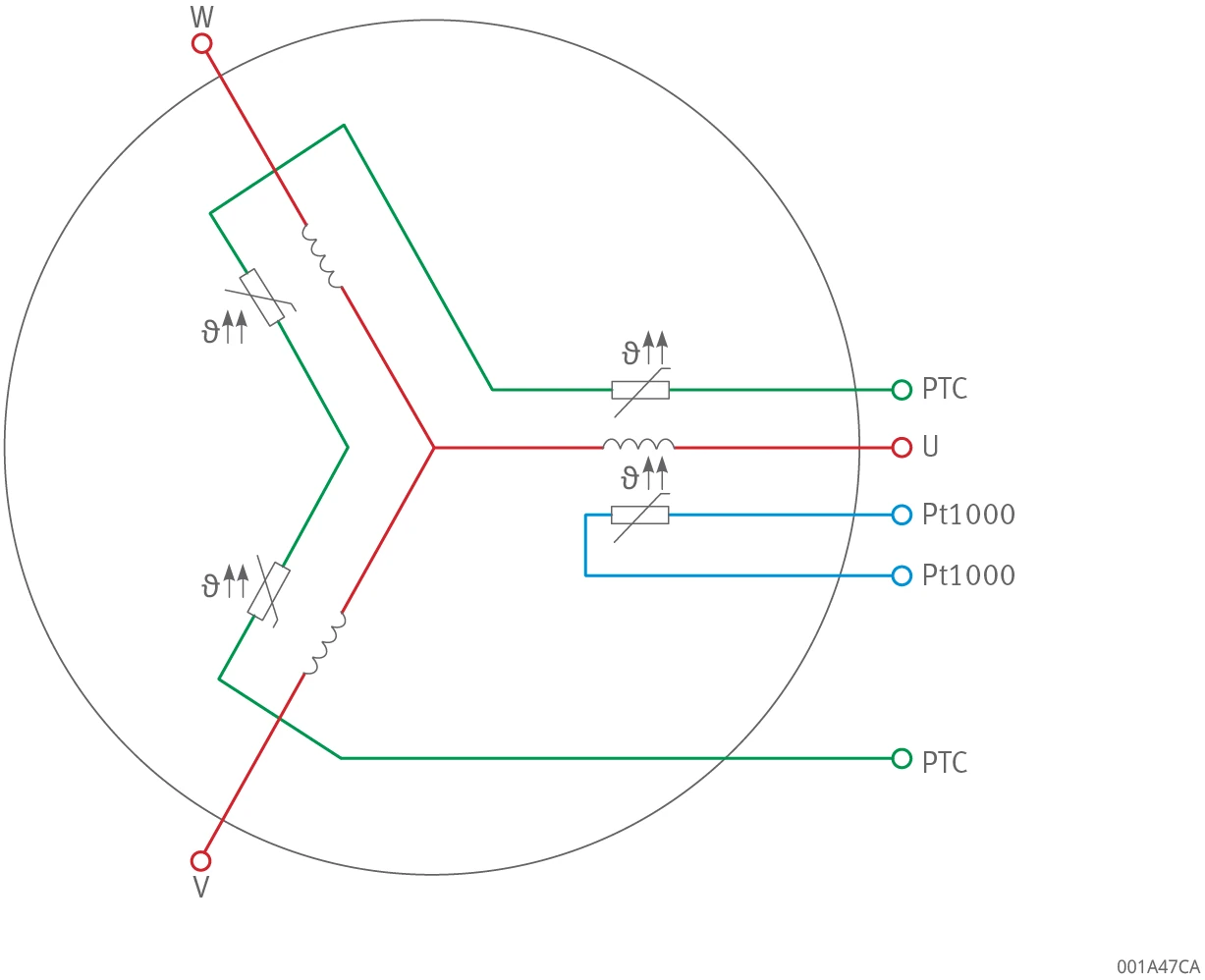
图 5:三重 PTC 与 Pt1000 的标准接线。显示马达三相 U、V、W 绕组上串联的 3 个 PTC 感测器,及一相上的 Pt1000 感测器的接线端子配置。
PTC 与 Pt1000 感测器与马达之间为基本绝缘(basic isolation)。感测器不适合依 DIN EN 61800-5-1 直接连接至 PELV 回路或 SELV 回路。
1.5.2 监控回路 I(Monitoring circuit I)
PTC 为热敏电阻。PTC 的热时间常数为数秒。与 Pt1000 不同,当超过标称响应温度 ϑn 时,PTC 的电阻会非常急遽地上升。超过标称响应温度时,电阻会增加至冷值的数倍。
使用三重 PTC(即三个串联的 PTC 感测器)时,总电阻会显著变化。即使只有一个感测器超过响应温度 ϑn,此显著变化亦会发生。使用三个 PTC 感测器可确保在不对称相负载下(例如静止时)马达仍可透过热敏电阻马达保护继电器安全关机。热敏电阻马达保护继电器通常在 1.5 kΩ 与 3.5 kΩ 之间跳脱,从而触发控制器停止。
PTC 感测器可侦测各绕组的过温,偏差仅数度。
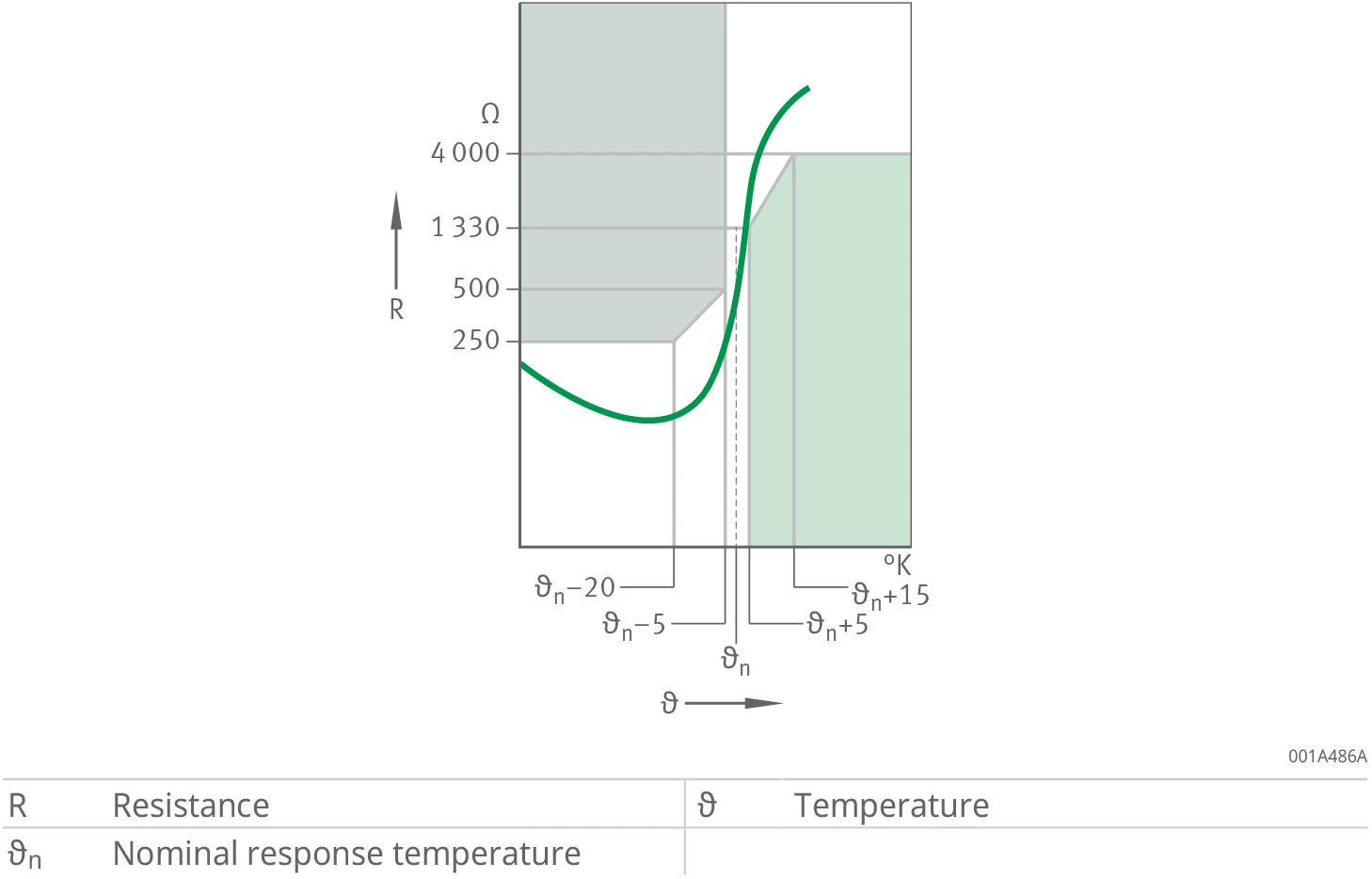
图 6:PTC 温度特性。纵轴为电阻 R(Ω),横轴为温度 ϑ。曲线在低于标称响应温度 ϑn 时电阻低,超过后急遽上升。标示电阻水平 250、500、1330、4000 Ω 与温度区间 ϑn−20、ϑn−5、ϑn、ϑn+5、ϑn+15。符号定义:R=电阻、ϑ=温度、ϑn=标称响应温度。
若 PTC 回路的电阻过低,热敏电阻马达保护继电器亦会反应。过低的电阻可能表示监控回路有缺陷。热敏电阻马达保护继电器可确保控制器与马达内 PTC 感测器之间安全的电气隔离。热敏电阻马达保护继电器不在马达的供货范围内。监控回路 I 的 PTC 感测器不适合用于温度量测。监控回路 II 适合用于温度量测。
原则上,连接至伺服转换器的热敏电阻马达保护继电器必须评估 PTC 感测器以保护马达的温度。
1.5.3 监控回路 II(Monitoring circuit II)
Pt1000 为铂量测电阻温度感测器。此感测器利用铂电阻的温度相依性。EN 60751 描述此感测器特性。
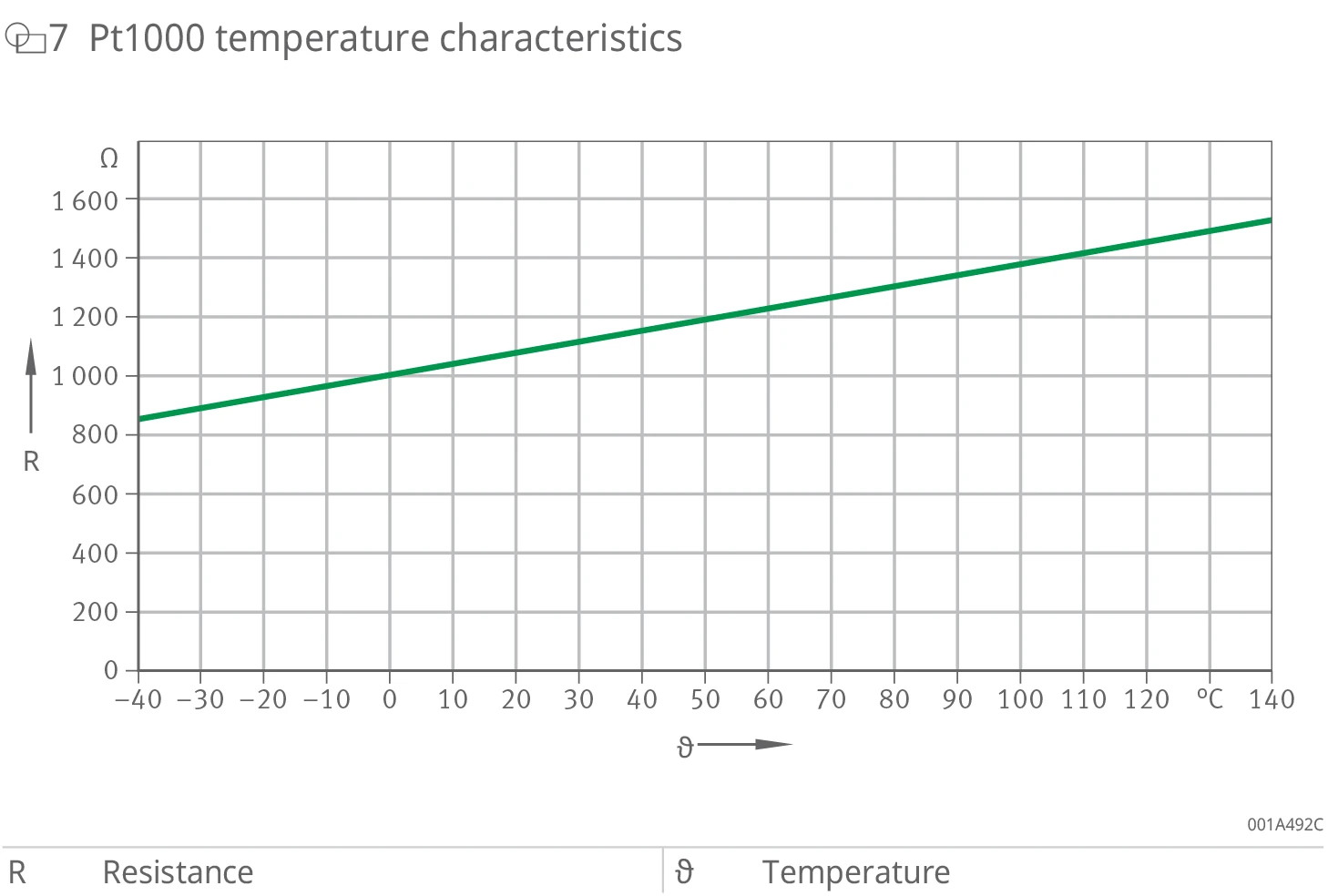
图 7:Pt1000 温度特性。纵轴为电阻 R(Ω),横轴为温度 ϑ(−40 至 +140 °C)。曲线呈线性上升,约 800 Ω(−40 °C)至约 1540 Ω(+140 °C)。符号定义:R=电阻、ϑ=温度。
安装状态下的热时间常数为数秒。控制器中输入预警门槛与关机极限以保护马达免于过温。预警门槛可避免热敏电阻马达保护继电器立即关机。
在静止状态下,视应用而定,固定电流可能流经马达绕组。极位置决定固定电流的大小。由于此相依性,马达不会被均匀加热。未受监控的绕组可能过热。一个 Pt1000 感测器只能监控一相。使用并评估三个 Pt1000 感测器可确保监控所有相。对于在静止时经常达到负载极限的应用,Schaeffler Industrial Drives 建议使用并评估三个 Pt1000 感测器。
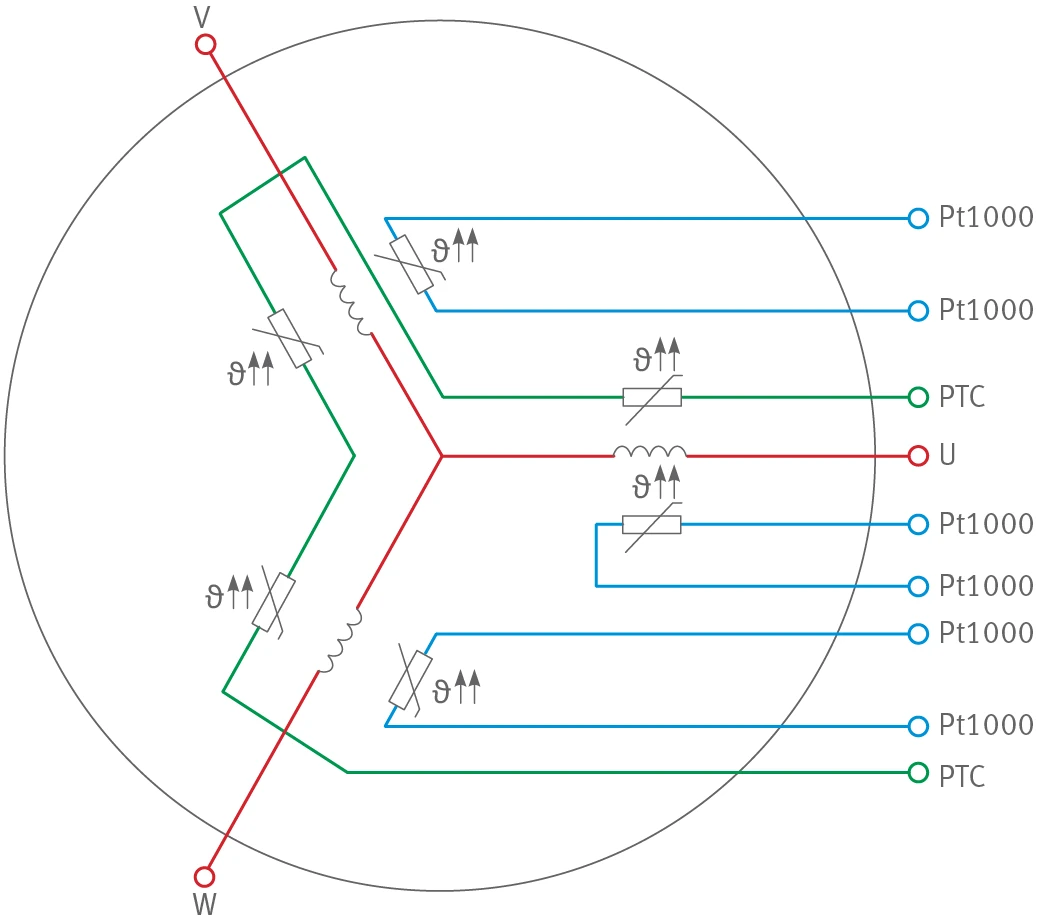
图 8:三重 PTC 与 3 个 Pt1000 的接线。显示马达三相 V、U、W 绕组上 3 个 PTC(串联)及 3 个 Pt1000 感测器的接线端子配置。
1.6 电气连接技术(Electrical connection technology)
1.6.1 标准电缆连接(Standard cable connections)
Schaeffler Industrial Drives 马达的标准电缆连接配备轴向螺钉连接。对于 RIB 扭矩马达,其相对于冷却接头的位置位于电缆出线的中间。对于具有多个电缆出线的 RKI 扭矩马达与 RKIB 扭矩马达,相对位置无法统一定义。报价与交货图面以及 3D 模型优先,并提供具约束力的位置。
RIB 扭矩马达随附 2 m 电缆。电缆长度从马达出线处量起。RKI 扭矩马达与 RKIB 扭矩马达随附 2 m 或 5 m 电缆。亦可提供客制化电缆长度。
电源连接电缆的截面取决于马达的连续电流。标准上,尺寸依 Plw(冷却)下的连续电流 Icw eff 设计。可使用轴向、径向与切向电缆出线。所需的电缆出线于下单时定义。对于超过 70 A 的马达电流,电缆出线会依特定应用配对。
电缆具有以下特性:
- 遮蔽(shielded)
- 表面为聚氨酯,耐油与耐冷却液
- 耐燃(flame resistant)
- 适用于拖链(drag chain)
标准版本的电缆末端为开放式并附套圈(ferrules)。可提供应用特定的电缆出线。
表 2:马达电缆连接,标准
| 截面 | 连续电流 | 直径 | 最小弯曲半径,固定 | 最小弯曲半径,可挠 | 质量 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4G0,75 | 10,4 | 8 | 40 | 80 | 95 |
| 4G1,5 | 16,1 | 9 | 45 | 90 | 140 |
| 4G2,5 | 22 | 10,5 | 52,5 | 105 | 210 |
| 4G4 | 30 | 12,5 | 62,5 | 125 | 296 |
| 4G6 | 37 | 14,5 | 72,5 | 145 | 416 |
| 4G10 | 52 | 17 | 85 | 170 | 644 |
| 4G16 | 70 | 20,5 | 102,5 | 205 | 997 |
表 3:马达连接配置
| 标示 | 配置 |
|---|---|
| 1/U | 相 U(Phase U) |
| 2/V | 相 V(Phase V) |
| 3/W | 相 W(Phase W) |
| GNYE | PE |
感测器电缆可透过 PTC 与 Pt1000 感测器进行温度监控。标准版本的电缆末端为开放式并附套圈。可提供应用特定的电缆出线。
表 4:感测器电缆连接,标准
| 截面 | 温度监控 | 直径 | 最小弯曲半径,固定 | 最小弯曲半径,可挠 | 质量 |
|---|---|---|---|---|---|
| – | – | mm | mm | mm | g/m |
| Sensor 4×0,14 | P 1) | 4,8 | 24 | 36 | 40 |
| Sensor 7×0,14 | – | 5,7 | 29 | 43 | 67 |
| Sensor 10×0,14 | T 2) | 6,7 | 34 | 50 | 87 |
1) P = 1 Pt1000 + 3 PTC 2) T = 3 Pt1000 + 3 PTC
表 5:连接配置,感测器型式 P
| 标示 | 配置 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000 |
| YE | Pt1000 |
表 6:连接配置,感测器型式 T
| 标示 | 配置 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000-1 |
| YE | Pt1000-1 |
| GY | Pt1000-2 |
| PK | Pt1000-2 |
| BU | Pt1000-3 |
| RD | Pt1000-3 |
1.6.2 特殊电缆连接(Special cable connections)
对于 RKI 扭矩马达与 RKIB 扭矩马达,在某些情况下使用遮蔽单芯线可能有其意义。所选的单芯线及其位置可在报价与交货图面以及报价电路图中查得。单芯线的一般特性值列于下表。
表 7:马达电缆连接,特殊设计
| 截面 | 连续电流 | 直径 | 最小弯曲半径,固定 | 最小弯曲半径,可挠 | 质量 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4×(1×2,5) | 22 | 4×6 | 24 | 45 | 4×58 |
| 4×(1×4) | 30 | 4×6,5 | 26 | 49 | 4×77 |
| 4×(1×6) | 37 | 4×7 | 28 | 53 | 4×101 |
| 4×(1×10) | 52 | 4×8,5 | 34 | 64 | 4×146 |
| 4×(1×16) | 70 | 4×10 | 40 | 75 | 4×223 |
| 4×(1×25) | 88 | 4×12 | 48 | 90 | 4×329 |
| 4×(1×35) | 110 | 4×13 | 52 | 98 | 4×444 |
1.6.3 马达的正转方向(Positive direction of rotation)
在所有三相马达中,电气正转方向对应顺时针旋转磁场,亦即相电压以 U、V、W 顺序感应。Schaeffler Industrial Drives 的马达在转子运动时具有以下正转方向:
- 从上方观看电缆出线侧时为逆时针
- 从下方背对电缆出线侧观看时为顺时针
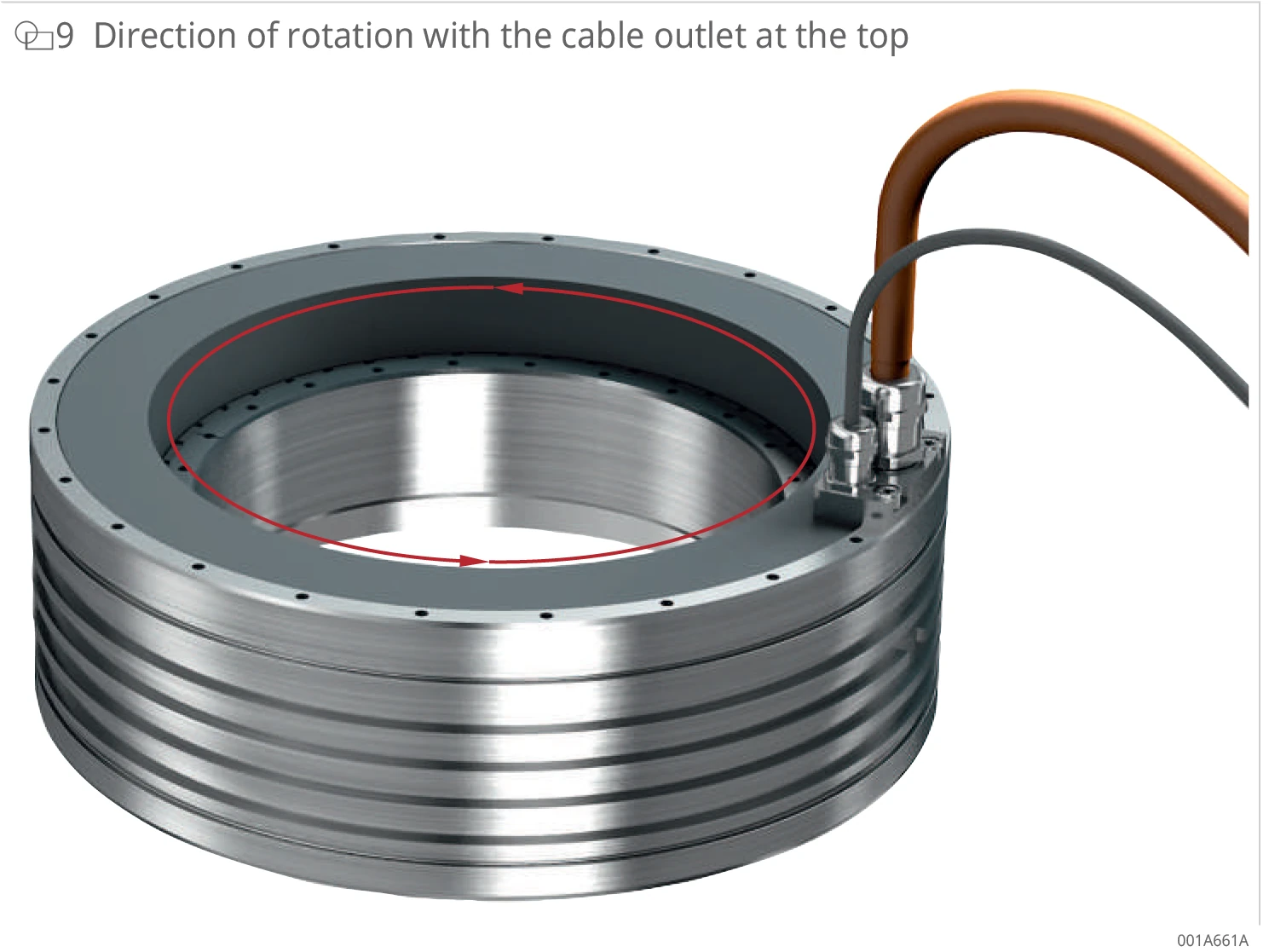
图 9:电缆出线朝上时的旋转方向。马达照片标示转子运动时的旋转方向(红色箭头,逆时针)。
1.6.4 换相(Commutation)
同步马达应尽可能采用换相运转。Schaeffler 建议采用基于量测系统的换相,因为现代伺服驱动器与控制器皆支援此方式。
1.6.5 绝缘强度与过电压现象(Isolation strength and overvoltage phenomena)
Schaeffler Industrial Drives 依下列指令开发、设计与制造马达:2014/35/EU(特定电压限制内使用的电气设备)。马达符合下列指令的要求:2014/30/EU(电磁相容性)。马达依 DIN EN 61800-5-1 设计用于 PDS(电力传动系统)的预定运转。
马达的绝缘系统依过电压类别 III 设计并为最大寿命最佳化。绝缘系统的介电强度在交货前会经过检查。现代测试方法(例如量测局部放电起始电压)可确保马达长时间的寿命与性能。
安装后,马达为 PDS 的一部分。PDS 由马达、马达电缆以及供应模组、再生模组、驱动控制器与滤波器等转换器组件构成。PDS 内可能发生非预期且不可预测的效应。控制器制造商通常会提供使用者应遵守的建议与专案规划资讯。未遵守可能导致马达或转换器绝缘系统提早失效。
下列措施可确保更安全的运转,与所用转换器无关:
- 短电缆与大面积电缆屏蔽支援:短电缆与大面积的电缆屏蔽支援/接触有助于避免马达电缆上高频反射所造成的过电压。马达与转换器之间长度 10 m 或更长的马达电缆会增加过电压的机率。Schaeffler Industrial Drives 建议在机器投入运转时,以适当的高压技术量测马达连接端子上的电压。
- 选择正确的马达:马达必须依转换器的直流汇流排电压选择。多数情况下,直流汇流排电压为 600 V。较低的直流汇流排电压会降低动态响应与最大转速。若直流汇流排电压为 720 V 或更高,或安装高度大于 2000 m,则需要强化绝缘系统。在此情况下,请联络 Schaeffler Industrial Drives。电感(相对相量测)远高于 50 mH 的马达,只有在转换器制造商与 Schaeffler Industrial Drives 个别检查后方可使用,否则电压尖峰可能在 PDS(电力传动系统)中引起共振并损坏绝缘系统。
必须遵守转换器制造商的指示。若有下列任一情况,必须在请求中载明。或者,可在现场试车时量测暂态过冲:
- 具多轴转换器模组或受调控供应的 PDS:此时相对于接地电位的电气振荡及由此产生的电压负载可能损坏马达的绝缘系统。
- 过去曾发生较明显绝缘损坏的应用
- 已存在对策的应用
对于 600 V 至 720 V 的直流汇流排电压,马达相间的过冲不得超过 1370 V。马达相间的峰对峰值不得超过 2800 V。
受调控供应造成的线路反射与电气振荡会叠加于马达相与接地电位之间的量测中。评估时仅应考虑峰对峰值。峰对峰值不得超过 2350 V。
1.6.6 永磁同步马达的短路行为(Short-circuit behaviour in permanent magnet synchronous motors)
在紧急情况下,相 U、V、W 短路可使扭矩马达驱动的轴减速。此紧急制动会产生短路电流。短路负载的大小与持续时间必须纳入 PDS(电力传动系统)的尺寸设计中。若短路电流高于冷却连续电流 Icw,则必须咨询 Schaeffler Industrial Drives。马达的制动行为依转速与惯性矩计算。
1.7 冷却与冷却回路(Cooling and cooling circuit)
1.7.1 热分布(Heat distribution)
马达组件将运转中产生的功率损耗传递至机器。为冷却、对流、传导与辐射所实施的设计措施,可用于影响与控制整个系统的热分布。掌握马达中的热源对结构设计至关重要。
在低转速、即极变频率 < 100 Hz 时,热量仅由马达绕组的铜损产生。在较高转速、即极变频率 > 100 Hz 时,转子与定子的铁损以及转子的磁体损亦会发生。铁损不随极变频率线性增加,并取决于磁场弱化角与电流密度。
在极变频率 < 100 Hz 运转时所产生的大部分热量,可透过定子外表面的液冷系统散逸。所谓的套式冷却系统连接至再冷却器(recooler)的冷却回路。冷却套通常是客户特定机器设计的结构件,但也可由 Schaeffler Industrial Drives 另行提供。冷却介质流经冷却肋中的开口——即所谓的冷却蜿道(cooling meander)——从进口到出口跨越不同层面。进口与出口可依需求指派给两个接头。流动区域以 O 形环对外密封。
对于高功率密度、高转速、即极变频率 > 100 Hz、优异动态响应或高精度的机器,Schaeffler Industrial Drives 另建议对周边结构或转子使用温控系统(加热或冷却)。通常使用旋转歧管(rotary manifold)来冷却轴承与转子。对周边结构进行温控有助于将机器结构的热变形及其对轴承预紧的影响降至最低,从而提升精度。
定子采用液冷的扭矩马达,其连续扭矩比无冷却运转高出最多 300 %。为达成高连续扭矩,扭矩马达在多数应用中皆采用液冷运转。
马达冷却的设计受下列因素影响:
- 安装空间
- 精度需求
- 周边结构的热敏感性
- 所需转速
1.7.2 冷却介质及其对冷却的影响(Cooling media and their effect on cooling)
性能资料以水作为冷却介质为基础。然而,水需要添加剂以防止冷却回路中的腐蚀与生物沉积。使用与水差异甚大的冷却介质,会降低可散逸的热量,从而也改变连续运转中可用的冷却连续扭矩 Tcw。如有需要,Schaeffler Industrial Drives 可协助应用的尺寸设计与可达成马达资料的确定。
以客户特定冷却介质进行尺寸设计时,需要下列资讯:
- 类型与密度
- 比热容
- 运动粘度
- 含成分物质的技术资料表
若使用粘度远高于水的冷却介质,使用前必须检查其对冷却的影响。可能需要调整 Icw eff 或 Tcw 等马达参数。必须使用所用介质的资料,并将预期温度纳入考量。
水(Water)
水是最常用的冷却介质。水具有高比热容且价格低廉。含有防止腐蚀与生物沉积添加剂的水优于所有其他冷却介质。COOL CONCENTRATE 或 COOL X 等添加剂几乎不影响密度与粘度等特性。含有此类添加剂之一的水是非常高效的冷却介质,比热容为 4.1 kJ/kg·K。此值大致对应于水的值。
表 8:水的材料特性
| 温度 | 密度 1) | 比热容 | 动粘度 | 运动粘度 |
|---|---|---|---|---|
| °C | kg/m³ | kJ/kg·K | Pa·s | mm²/s |
| +20 2) | 998,21 | 4,1840 | 0,0010014 | 1,00319572 |
| +25 | 997,05 | 4,1813 | 0,00088982 | 0,892452736 |
| +30 | 995,65 | 4,1798 | 0,00079705 | 0,800532316 |
1) 依 DIN 1306,次要条件如气压与重力加速度适用 1 g,压力 pn = 1.01325 bar。
2) 参考温度。
水–乙二醇混合物(Water–glycol mixture)
水与乙二醇的混合物冰点比水低,并可防止腐蚀。此混合物常用于寒冷环境或需要防冻的应用。由于水–乙二醇混合物的粘度高于纯水,管路系统的压力损失较高。循环泵必须相应地输送较高的压力。
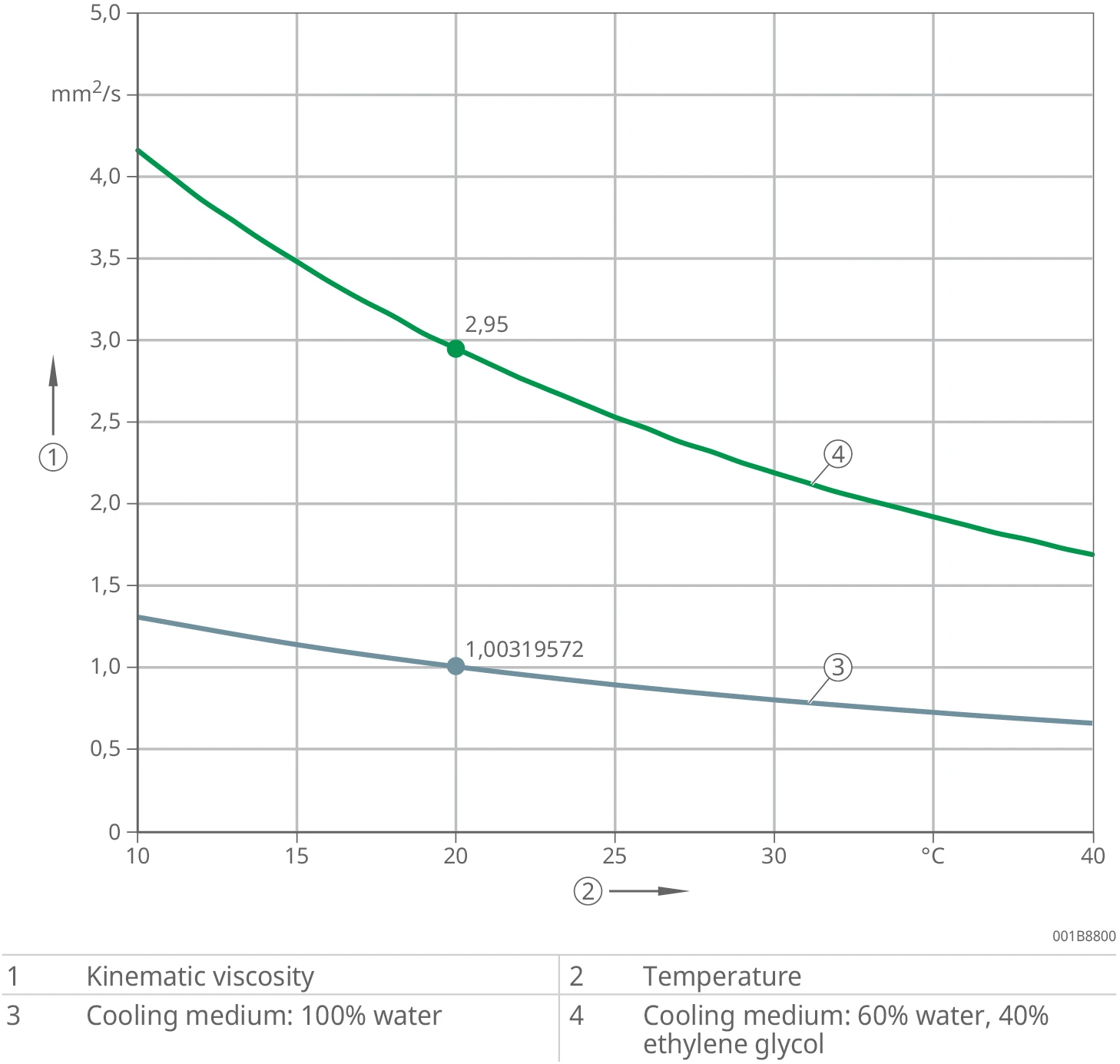
图 10:运动粘度随温度的相依性。纵轴为运动粘度(mm²/s),横轴为温度(°C)。两条曲线:③=冷却介质 100% 水(20 °C 时 1.00319572)、④=冷却介质 60% 水 + 40% 乙二醇(20 °C 时 2.95)。符号定义:①=运动粘度、②=温度。
范例
40 % 乙二醇(例如 Antifrogen N)与 60 % 水的混合物,冰点为 −25 °C,运动粘度为水的 2.95 倍。只有在显著较高的压力下才能达到建议流量。修正系数可用于粗略估算。
表 9:乙二醇修正系数
| 浓度 | 冰点 | 压差修正系数 |
|---|---|---|
| % | °C | – |
| 20 | −9 | 1,14 |
| 30 | −16 | 1,23 |
| 40 | −25 | 1,33 |
| 44 | −30 | 1,38 |
所用冷却介质的精确值必须始终加以遵守。
油(Oils)
在某些工业应用中使用油作为冷却介质。应用决定何种油适用。若使用油,必须始终达成冷却所需的体积流量。如有需要,Schaeffler Industrial Drives 可协助尺寸设计。所有组件的化学相容性必须由客户检查。
1.7.3 标称资料对供水温度与冷却介质的影响(Influence of nominal data on the supply temperature and cooling medium)
冷却运转所指定的连续电流 Icw eff 是相对于标称冷却水进水温度 ϑnf。连续电流 Icw eff 列于性能资料中。
较高的供水温度 ϑf 会降低冷却能力,因此也降低连续电流。降额连续电流 Ic red 由下列二次方关系式计算:
公式 2:降额连续电流(Reduced continuous current)
Ic red / Icw eff = √(ϑmax − ϑf) / (ϑmax − ϑnf)
| 符号 | 单位 | 说明 |
|---|---|---|
| Ic red | A | 降额连续电流(Reduced continuous current) |
| Icw eff | A | 有效连续电流,冷却(Effective continuous current, cooled) |
| ϑmax | °C | 最大允许绕组温度(Max. permissible winding temperature) |
| ϑnf | °C | 标称进水温度(Nominal feed temperature) |
| ϑf | °C | 当前进水温度(Current feed temperature) |
若使用客户特定冷却介质,可散逸的废热量会改变,因此连续运转中可用的冷却连续扭矩也会改变。如有需要并提供物质特性,Schaeffler Industrial Drives 的工程师可确定所用冷却介质的影响。
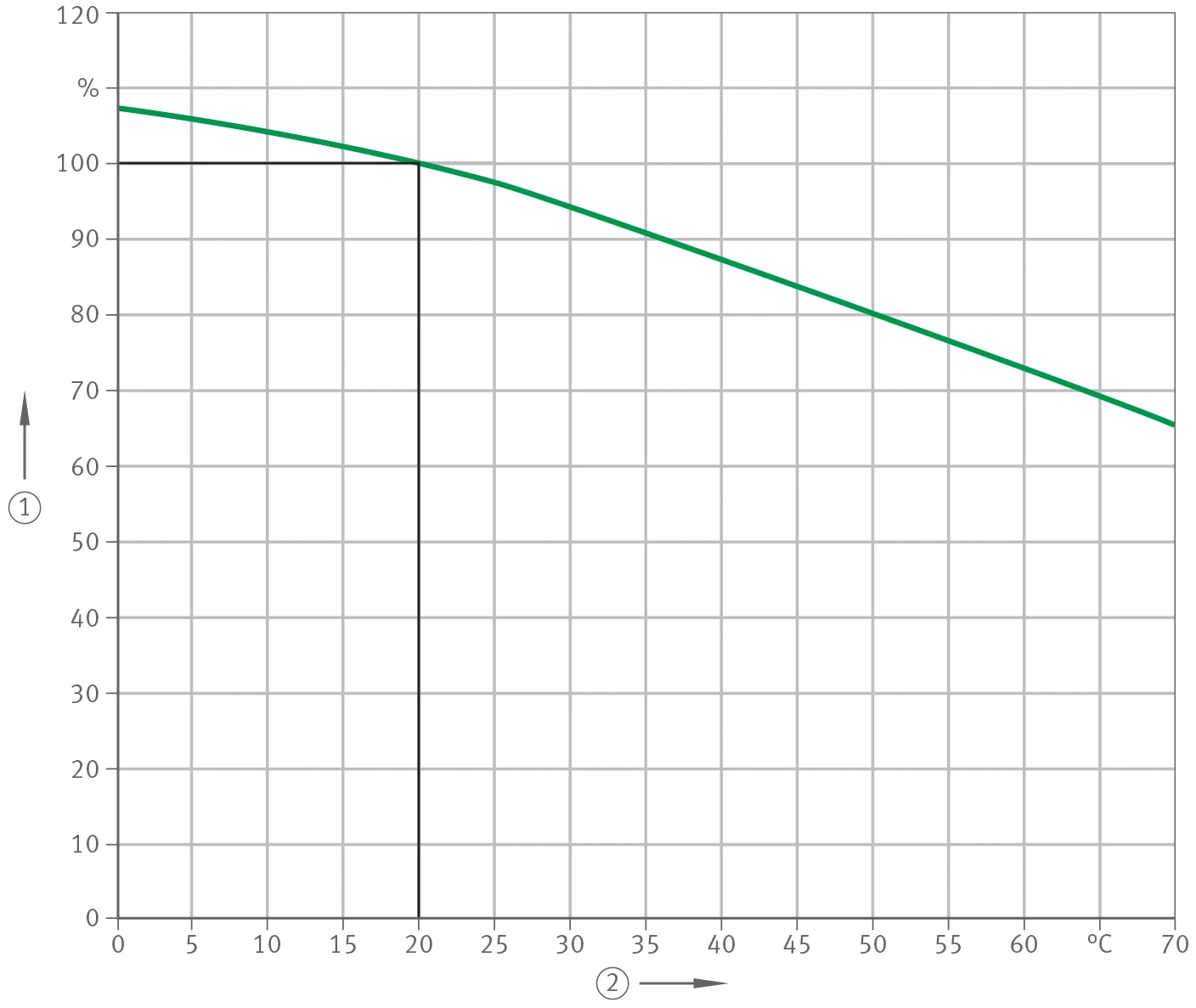
图 11:相对连续电流 Ic red / Icw eff 随供水温度 ϑf 变化的函数(ϑnf = +20 °C)。纵轴为相对连续电流(%),横轴为实际供水温度 ϑf(°C)。曲线于 +20 °C 为 100%,随温度上升而下降。符号定义:①=相对连续电流 Ic red / Icw eff(%)、②=实际供水温度 ϑf、Ic red=降额连续电流、Icw eff=连续电流(冷却)、ϑnf=标称进水温度。
1.8 马达排列(Arrangement of motors)
1.8.1 多马达於单轴并联运行(Operating several motors in parallel on one axis)
以 2 个或更多同步马达同时驱动一轴在某些应用中有其意义。此类应用包括五轴加工中心的枢轴系统、叉式铣头,或滚齿机的机器主轴。结构相同的同步马达并联连接可在同一转换器上一起运转。只有在低转速下,两个扭矩马达於单轴并联运转才能达到令人满意的同步品质。因此实务上仅 RIB 系列扭矩马达用于并联运转。RIB 系列扭矩马达比 RKIB 系列扭矩马达慢。
1.8.2 马达排列(Arrangement of motors)
区分为平行串接(parallel tandem)排列与反平行(亦即镜像、Janus)排列的定子。
转子对齐(Secondary part alignment)
在并联运转中,无论何种排列,转子都必须对齐于相同的角度位置。可使用各自的转子标记进行对齐。
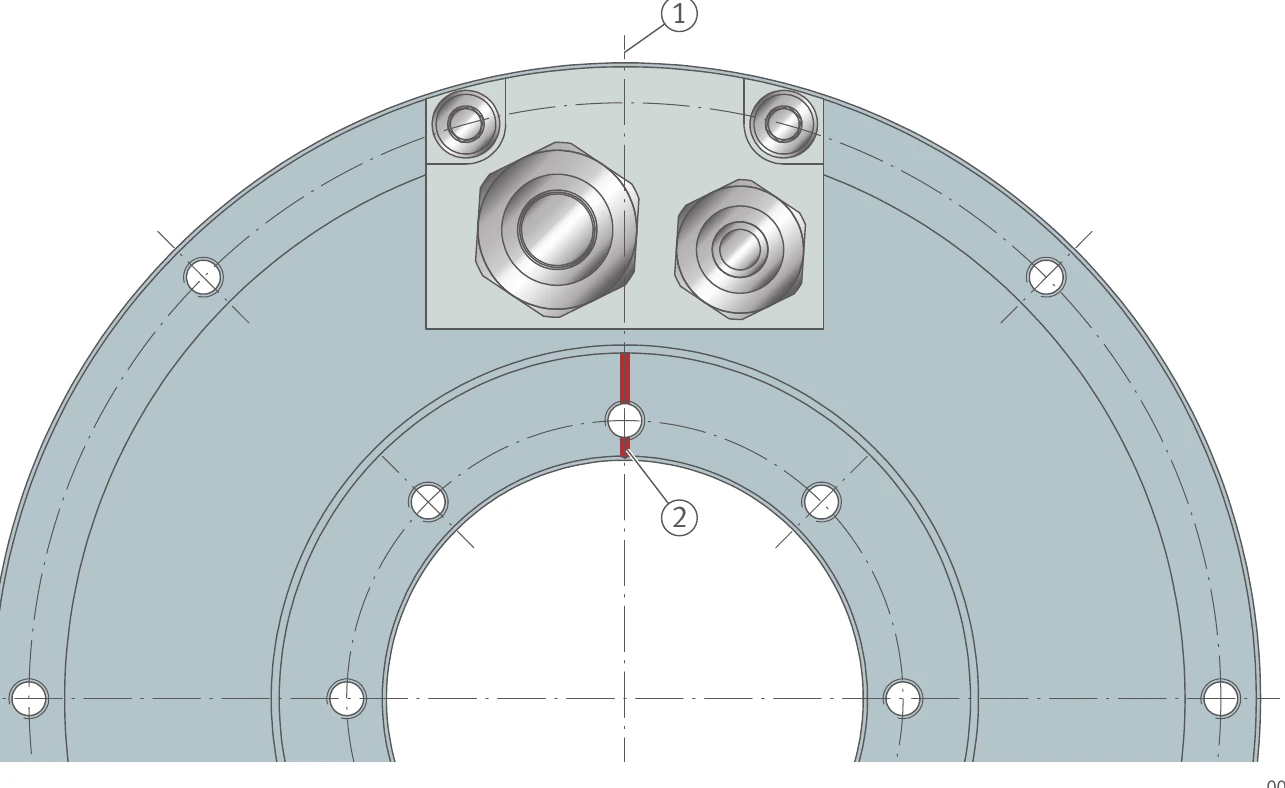
图 12:零轴与旋转标记对齐。①=零轴(Zero axis)、②=转子(转子)标记(Secondary part rotor marking)。
定子对齐(Primary part alignment)
目标是将各相的线圈对齐于相同的角度位置。定子可使用零轴对齐。在具单一电缆出线的标准 RIB 马达中,零轴位于电缆夹上的孔之间。对于客户特定或多重电缆出线,必须咨询 Schaeffler Industrial Drives 以确定零轴。
在规划并联运转之前,必须先联络 Schaeffler Industrial Drives。
串接排列(Tandem arrangement)
电缆出线指向相同的纵向方向。
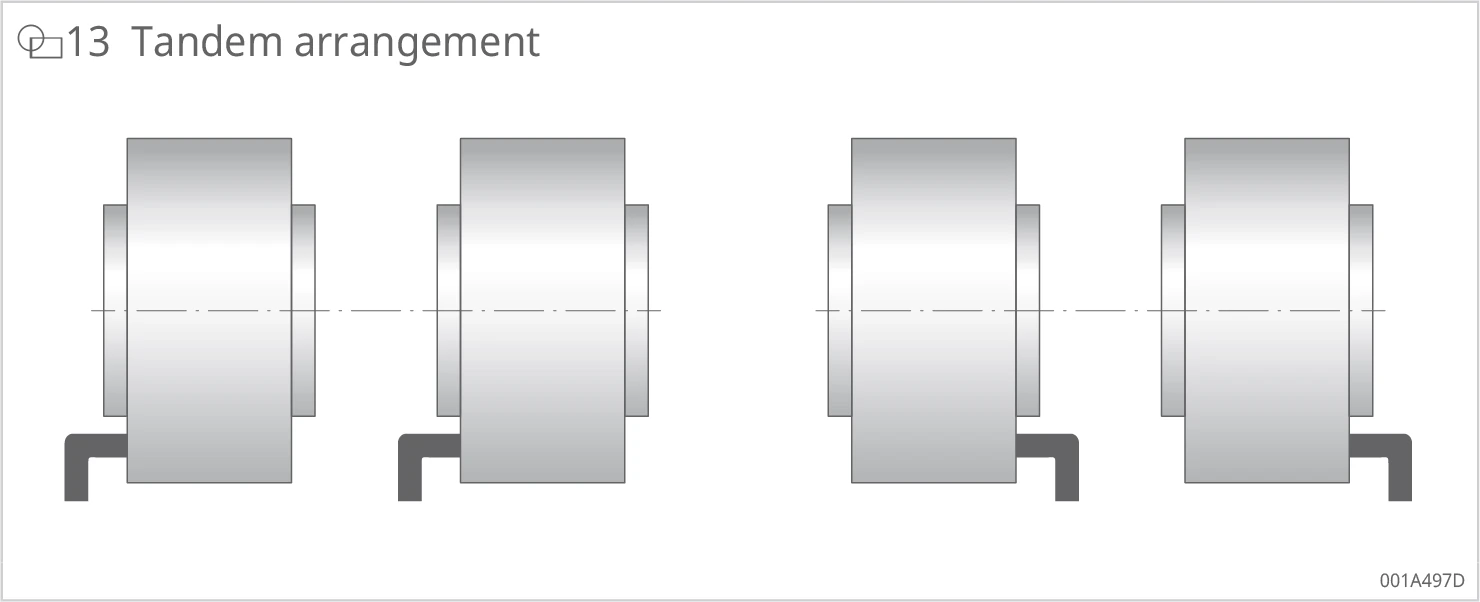
图 13:串接排列。两对马达电缆出线指向相同纵向方向的示意图。
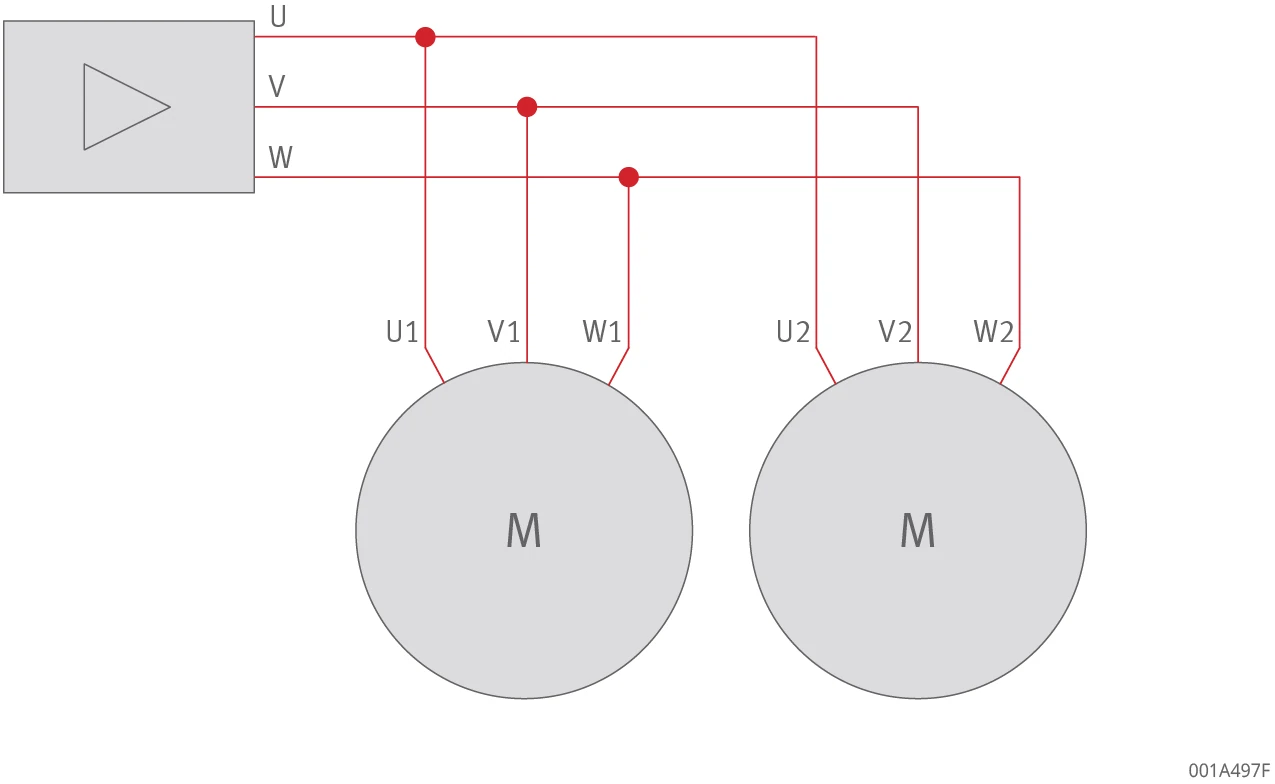
图 14:串接排列接线图。转换器 U、V、W 三相分别连接至两个马达 M 的 U1/V1/W1 与 U2/V2/W2 端子(同名相连接在一起)。
定子的零轴亦与电缆出线对齐。在齐平同轴电缆出线的情况下,螺栓圆必须同心配置,且同名的相连接必须对齐。
Janus 排列(Janus arrangement)
电缆出线指向相反的纵向方向。
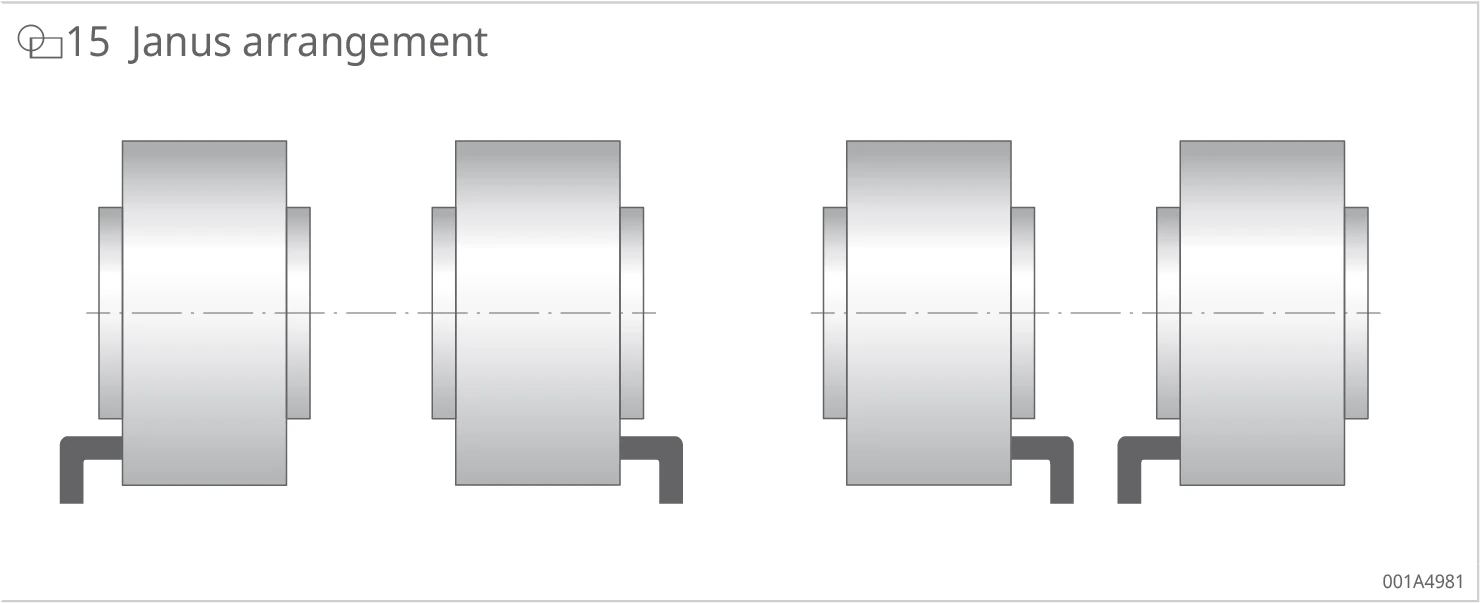
图 15:Janus 排列。两对马达电缆出线指向相反纵向方向的示意图。
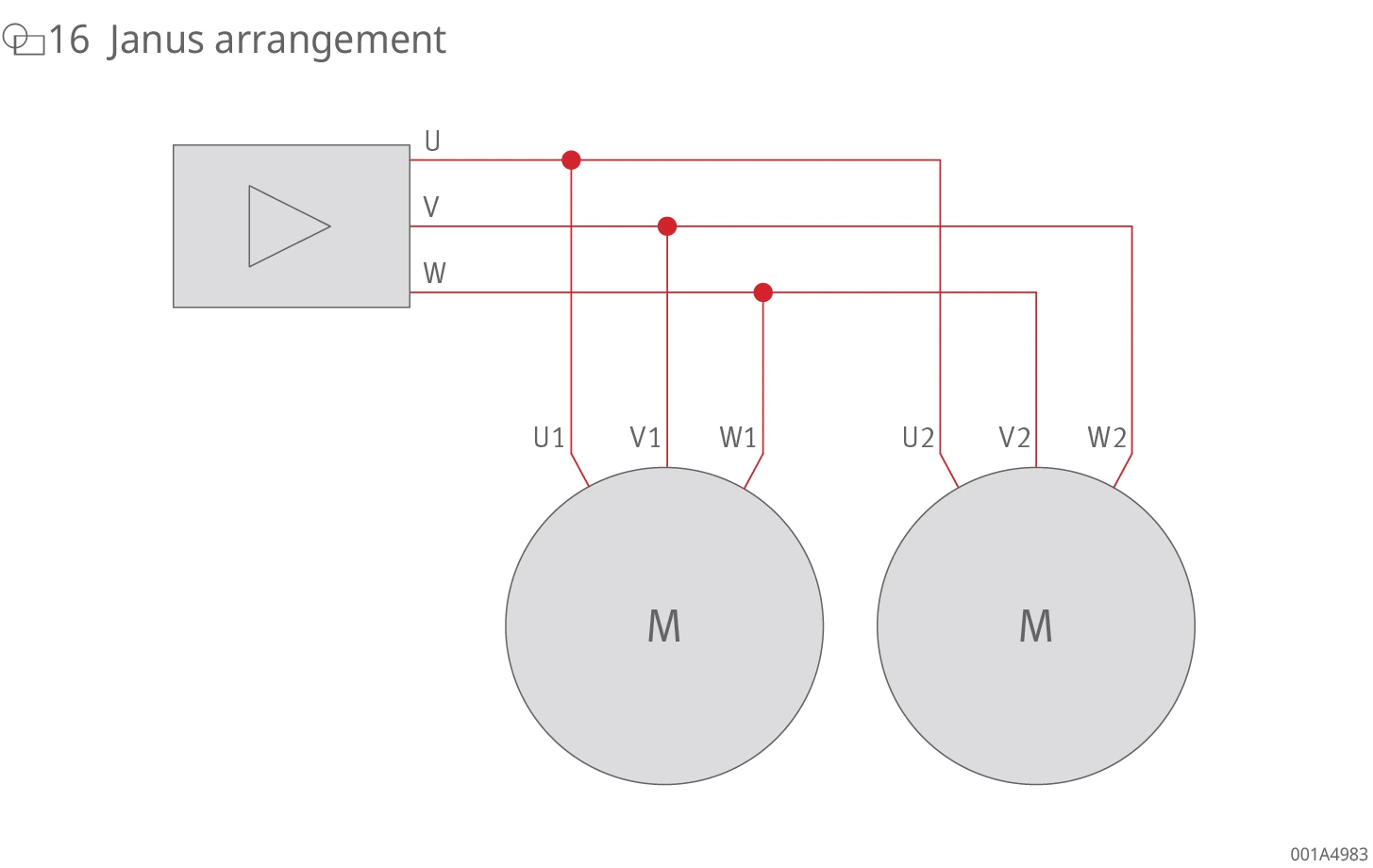
图 16:Janus 排列接线图。转换器 U、V、W 三相连接至两个马达 M,其中一个马达的 V 与 W 相互换以达成镜像运转。
在镜像的 Janus 排列中,零轴也必须一致。视零轴位置而定,可能需要偏移螺栓圆。镜像排列中的马达必须以相反的旋转方向运作。为此,两个马达其中之一的 V 相与 W 相互换。因此 U1 与 U2、V1 与 W2、W1 与 V2 一起连接至转换器。
1.9 多马达於单轴并联运行(Operating several motors in parallel on one axis)
1.9.1 电缆出线位移(Displacement of the cable outlet)
在所有排列中,定子(因此电缆出线)可彼此以特定大小的步距扭转。特别是在具内部电缆出线的 Janus 排列中,可借由扭转定子来设计较短的整体轴。步距对应于一对极,且必须乘以整数因子。
扭转角度计算如下:
公式 3:扭转角度(Torsion angle)
扭转角度 = ( 360° / 极对数 ) · x
| 符号 | 单位 | 说明 |
|---|---|---|
| x | – | 任意整数因子(any integer factor) |
在某些系列中,于螺栓圆中也可达成有利的扭转角度,例如 RIB11-3P-230xH:
公式 4:螺栓圆中的扭转角度(Torsion angle in bolt circle)
扭转角度 = ( 360° / 22 ) · 11 = 180°
1.9.2 设定相位一致(Setting the phase coincidence)
在所有情况下,都应检查并联马达彼此是否相位对齐。若相位未对齐,会因感应的短路电流而产生与转速相关的扭矩常数与效率下降。
相位对齐透过以双通道示波器量测马达的反电动势,并同时旋转相连的转子来完成。为使互连马达达成良好的静态功能,两条曲线之间的相位偏移不得超过 ±5°。机械调整转子或定子可消除马达间既有的电气相位偏移。
下列关系式适用:
公式 5:机械角度定理(Mechanical angle theorem)
机械角度设定 = 相位偏移 / 极对数
正确安装时,对应于 EN 20273 中等公差等级的螺栓圆螺栓接合间隙足以进行微调。若超过两个马达并联连接,则定义其中一个为主马达,并作为对齐其余所有马达的参考点。
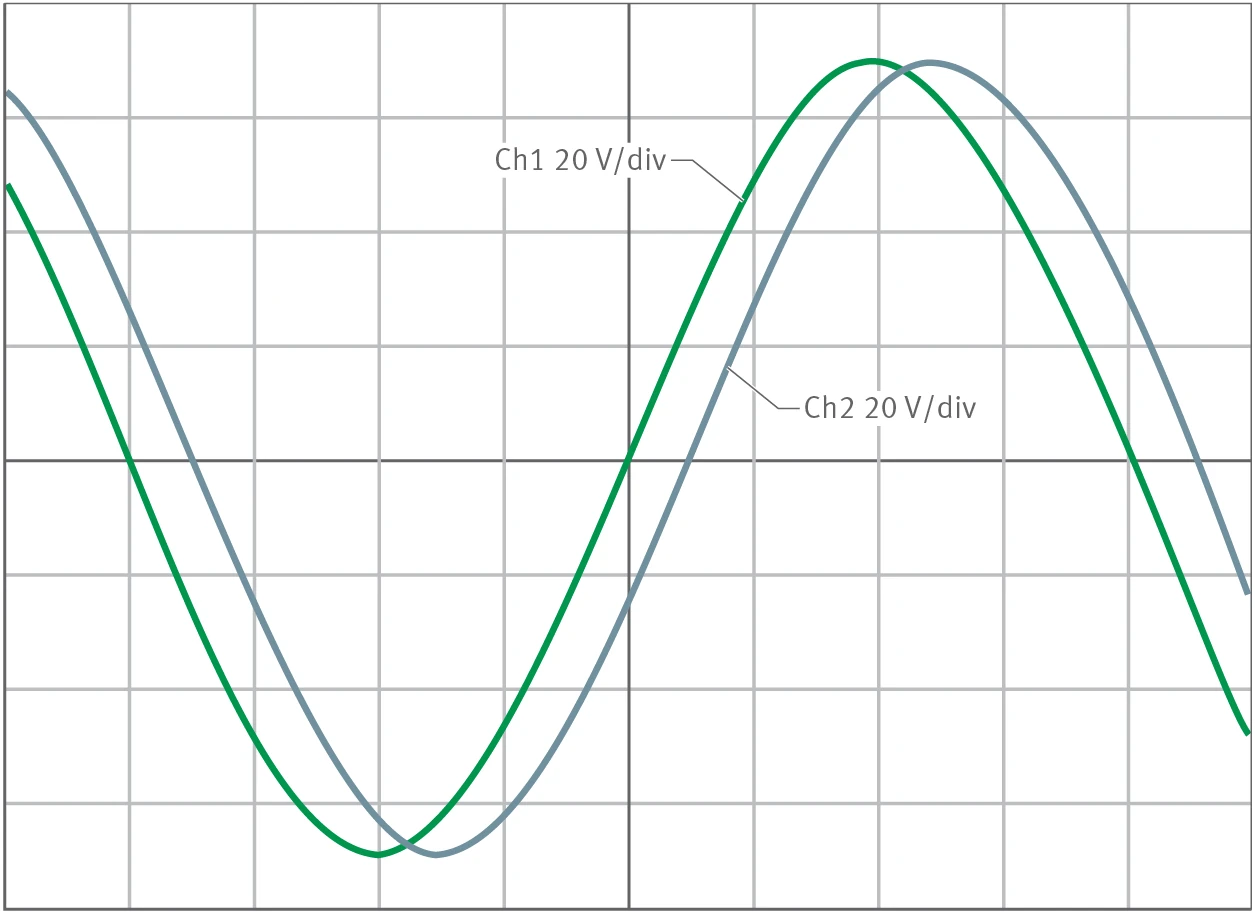
图 17:反电动势之间的相位偏移 22.5°。双通道示波器显示两条反电动势曲线(Ch1 20 V/div、Ch2 20 V/div)之间的相位偏移。
1.9.3 温度感测器的评估(Evaluation of the temperature sensors)
马达彼此对齐不正确或不精确可能造成马达热过载。整合的 PTC 感测器可保护马达。排列中各马达的 PTC 感测器串联连接,并由热敏电阻马达保护继电器评估。
为防止马达保护系统提早跳脱,在三个或更多 PTC 监控回路的情况下,Schaeffler Industrial Drives 建议使用多个或多通道热敏电阻马达保护继电器。
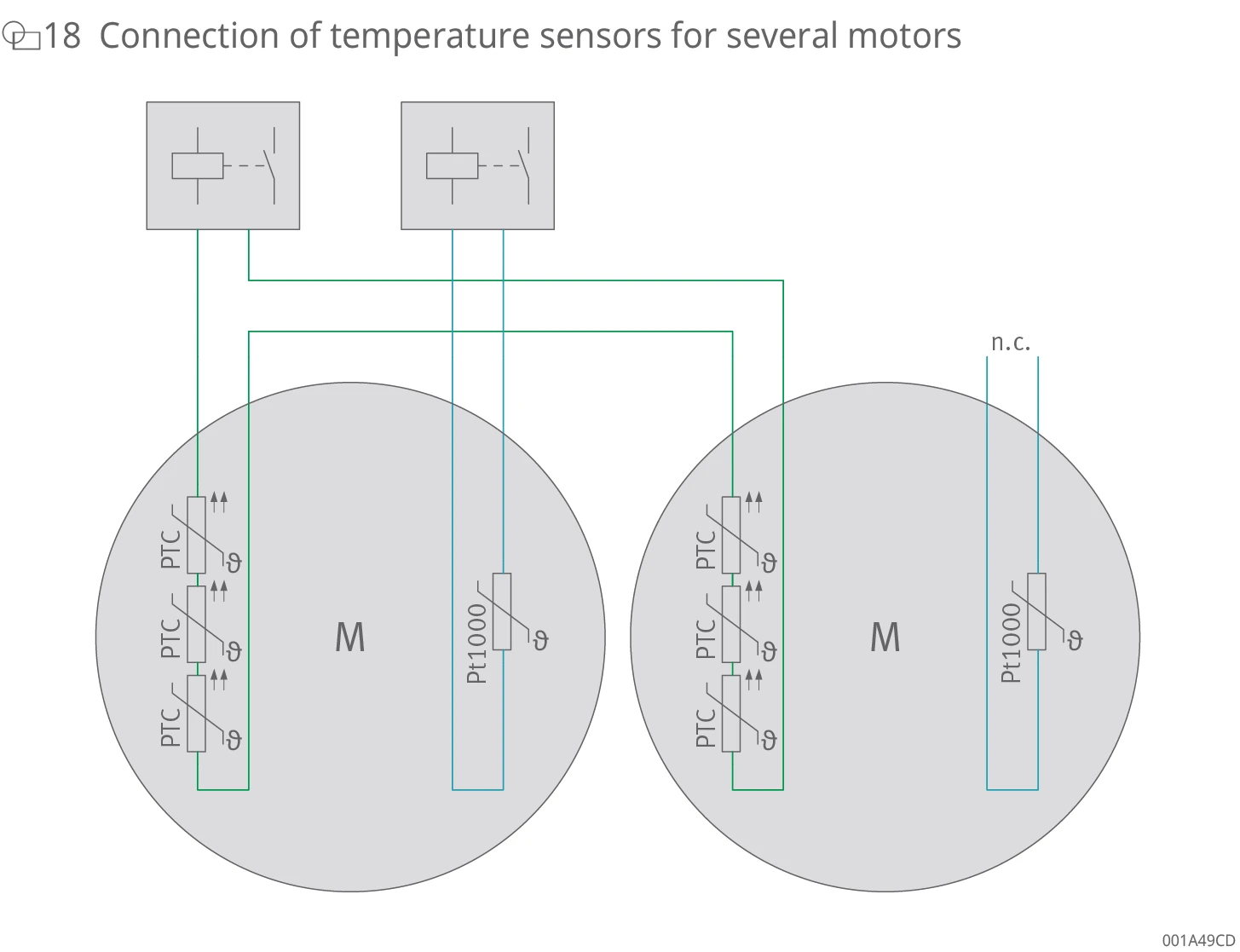
图 18:多马达温度感测器接线。两个马达 M 的 PTC(串联)连接至马达保护继电器,各马达另有 Pt1000 感测器(其中一个标示 n.c. 未连接)。
1.9.4 合成马达资料(Resulting motor data)
结构相同的个别马达并联连接,会为转换器产生新的等效马达电气资料。这些电气资料可轻易由个别马达的下列资料确定:
- 极对数、扭矩常数、电压常数、时间常数与转速保持不变。
- 电流、扭矩与阻尼常数乘以个别马达的数量。
- 电阻与电感除以个别马达的数量。
1.10 旋转应用的直驱选型(Selection of direct drives for rotary applications)
1.10.1 循环应用(Cycle applications)
循环运转由连续的定位运动以及其间的运动暂停所组成。简单的定位动作呈现为正向加速运动与随后的制动。若负加速度的值相同,则加速时间与制动时间相同。最大角速度 ωmax 在加速阶段结束时达到。
循环以 ω-t 图描述。循环运转的 ω-t 图显示具暂停的正/反向旋转。
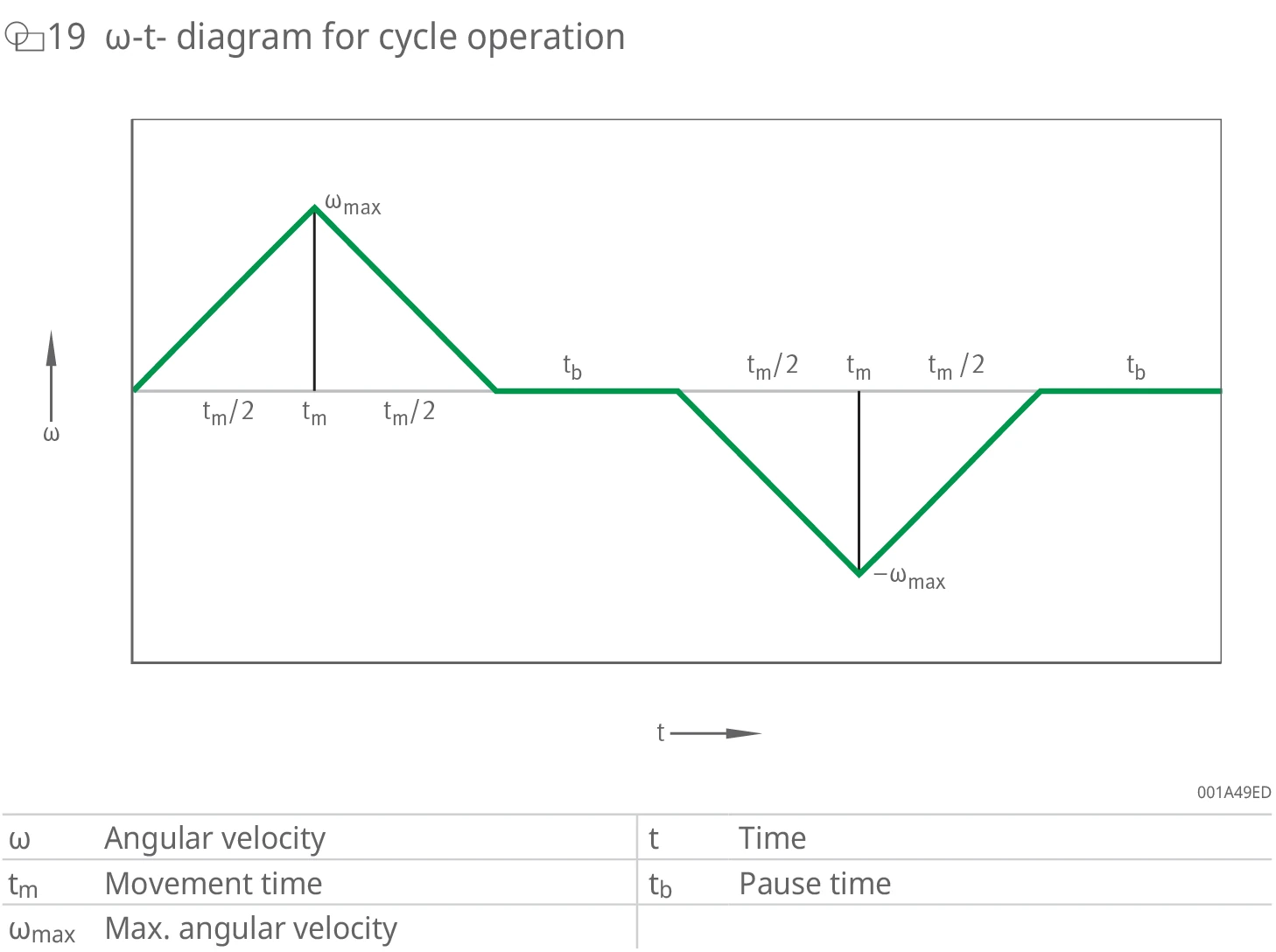
图 19:循环运转的 ω-t 图。纵轴为角速度 ω,横轴为时间 t。显示正/反向旋转与暂停,标示运动时间 tm、暂停时间 tb 与最大角速度 ωmax。符号定义:ω=角速度、tm=运动时间、ωmax=最大角速度、t=时间、tb=暂停时间。
循环运转的 α-t 图以及运动所需扭矩的曲线,由具暂停的正/反向旋转得出:
公式 6:扭矩(Torque)
T = J · α
| 符号 | 单位 | 说明 |
|---|---|---|
| T | Nm | 扭矩(Torque) |
| J | kg·m² | 惯性矩(Mass moment of inertia) |
| α | rad/s² | 角加速度(Angular acceleration) |
马达选型依所需循环的扭矩曲线,依下列三项准则进行:
- 循环中最大扭矩 ≤ Tp(依性能资料)
- 循环中有效扭矩 ≤ Tc(马达无冷却)或 Tcw(水冷)(依性能资料)
- 循环中最大转速 ≤ nlp(依性能资料)
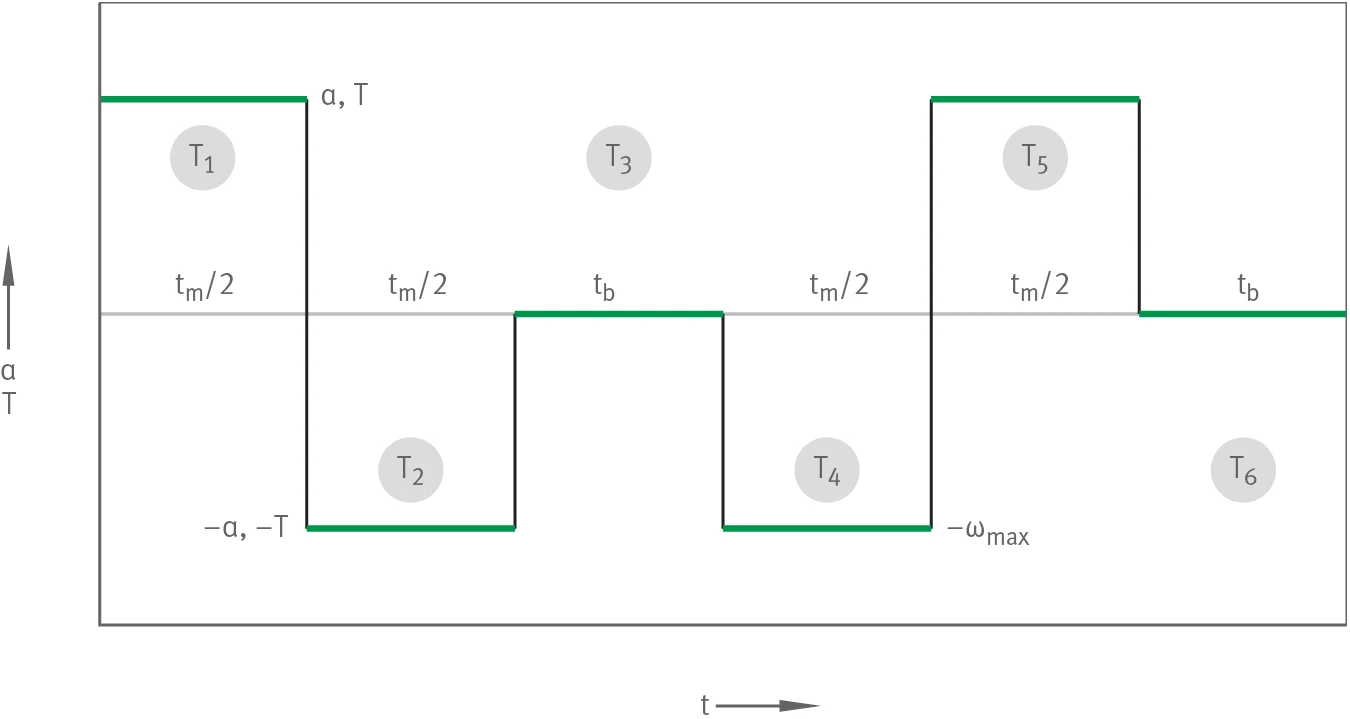
图 20:循环运转的 α-t 图。纵轴为角加速度 α 与扭矩 T,横轴为时间 t。显示六个扭矩步阶 T1~T6。符号定义:α=角加速度、tm=运动时间、ωmax=最大角速度、t=时间、tb=暂停时间、T=扭矩、T1=扭矩步阶 1(T1=T)、T2=扭矩步阶 2(T2=−T)、T3=扭矩步阶 3(T3=0)、T4=扭矩步阶 4(T4=−T)、T5=扭矩步阶 5(T5=T)、T6=扭矩步阶 6(T6=0)。
有效扭矩等于由循环中六个扭矩步阶构成之扭矩曲线的均方根值。
公式 7:有效扭矩(Effective torque)
Teff = √(T12·t1 + T22·t2 + … + T62·t6) / (t1 + t2 + … + t6)
| 符号 | 单位 | 说明 |
|---|---|---|
| Teff | Nm | 有效扭矩(Effective torque) |
| T1 | Nm | 扭矩步阶 1,T1 = T |
| t1 | s | 运动时间 1,t1 = tm/2 |
| T2 | Nm | 扭矩步阶 2,T2 = −T |
| t2 | s | 运动时间 2,t2 = tm/2 |
| T6 | Nm | 扭矩步阶 6,T6 = 0 |
| t6 | s | 运动时间 6,t6 = tb |
我们建议扭矩采用 1.4 的安全系数。安全系数考虑了马达在扭矩–电流特性曲线非线性区运转等情况,此时 Teff 的计算式仅近似适用。
有效扭矩可由下列扭矩计算:
- T1 = T
- T2 = −T
- T3 = 0
- T4 = −T
- T5 = T
- T6 = 0
有效扭矩可由下列时间计算:
- t1 = tm/2
- t2 = tm/2
- t3 = tb
- t4 = tm/2
- t5 = tm/2
- t6 = tb
公式 8:有效扭矩(Effective torque)
Teff = T · √tm / (tm + tb)
公式 9:有效扭矩(Effective torque)
Teff = J · α · √tm / (tm + tb)
若循环中仅有相同大小的扭矩作用,则此方程式适用于有效扭矩(公式 9)。惯性矩与角加速度为定值。运动时间除以运动时间与暂停时间之和置于根号下。循环时间纳入分母中。
定位运动的角加速度、最大角速度与最大转速可由下列公式计算:
公式 10:角加速度(Angular acceleration)
α = (4 · φ) / tm2
| 符号 | 单位 | 说明 |
|---|---|---|
| α | rad/s² | 角加速度(Angular acceleration) |
| φ | ° | 运动角度(Movement angle) |
| tm | s | 运动时间(Movement time) |
公式 11:最大角速度(Max. angular velocity)
ωmax = (2 · φ) / tm
| 符号 | 单位 | 说明 |
|---|---|---|
| tm | s | 运动时间(Movement time) |
公式 12:最大转速(Max. speed)
nmax = (30 / π) · ωmax
此处所示的计算方法为理想化与简化的。例如角加速度的增加为无限快。实务上,角加速度受马达电感或其他组件限制。设计中以安全系数,或在高动态运动的情况下以每次定位作业额外加上 15 ms 至 20 ms 的时间,来考量这些效应。
1.10.2 循环应用范例(Example of cycle applications)
表 10:指定值
| 指定值 | 单位 | 数值 |
|---|---|---|
| 运动角度 φ | ° | 180 |
| 运动时间 tm | s | 0,5 |
| 循环时间 tm + tb | s | 1,35 |
| 惯性矩 J | kg·m² | 2,5 |
| 摩擦扭矩 TF | Nm | 8 |
| 安全系数 SF | – | 1,4 |
计算(Calculation)
运动角度换算:
公式 13:运动角度换算(Movement angle conversion)
φ = (π / 180) · 180 rad = 3,142 rad
最大角速度:
公式 14:最大角速度(Max. angular velocity)
ωmax = (2 · φ) / tm = (2 · 3,142) / 0,5 rad/s = 12,57 rad/s
最大转速:
公式 15:最大转速(Max. speed)
nmax = (30 / π) · ωmax = (30 / π) · 12,57 1/s = 120 min⁻¹
角加速度:
公式 16:角加速度(Angular acceleration)
α = (4 · φ) / tm2 = (4 · 3,142) / 0,52 rad/s² = 50,27 rad/s²
考量轴承摩擦扭矩 TF 后,最大扭矩如下:
公式 17:最大扭矩(Max. torque)
Tmax = (J · α) + TF = (2,5 · 50,27) + 8 = 133,68 Nm
考量轴承摩擦扭矩 TF 后的有效扭矩:
公式 18:有效扭矩(含轴承摩擦扭矩)(Effective torque, taking into account the bearing frictional torque)
Teff = ( J · α · √tm / (tm + tb) ) + TF = ( 2,5 · 50,27 · √0,5 / 1,35 ) + 8 = 84,48 Nm
考量安全系数 SF 后,马达依下列要求选型:
Tsafe max = Tmax × 1,4 ≤ TP
Tsafe eff = Teff × 1,4 ≤ Tcw
nmax ≤ nlp
只有在使用未稳定化直流汇流排电压的变频器时,才需要转速的安全系数。在本案例中,使用稳定化直流汇流排电压 UDCL = 600 V 的变频器。因此可不需转速安全系数,且 nmax ≤ nlp 适用。若 nmax > nlp,可使用对应直流汇流排电压下的扭矩–转速特性曲线验证 nmax 时的运转点 Tsafe max。
计算结果得出下列马达需求:
无安全系数:
- Tp = 133,68 Nm
- Tcw = 84,48 Nm
含安全系数:
- Tsafe max = 187,15 Nm
- Tsafe eff = 118,27 Nm
马达 RIB17-3P-168x50-Z0.7(Tp = 233 Nm、Tcw = 123 Nm、nlp = 150 min⁻¹)完全满足本范例计算的需求。
1.10.3 NC 旋转台应用(NC rotary table applications)
对于水冷 NC 旋转台应用,通常已知转速 n、惯性矩 J、运动中的加工扭矩 TW 与零速扭矩 Tsw,以及 S1 运转的角加速度 α 与 S6 运转的 αmax。虽然扭矩的有效时间经常变动,但尽可能准确地将有效扭矩确定为连续扭矩、最大扭矩确定为最大扭矩,对于选择最佳马达并防止超过最大允许绕组温度是必要的。
马达运转中发生的所有负载扭矩都纳入扭矩计算中。
1.10.4 NC 旋转台应用范例(Example of NC rotary table applications)
表 11:指定值
| 指定值 | 单位 | 数值 |
|---|---|---|
| 转速 n | min⁻¹ | 60 |
| 惯性矩 J | kg·m² | 4 |
| 加工扭矩 TW | Nm | 300 |
| 摩擦扭矩 TF | Nm | 50 |
| 重力作用力(附加扭矩)TZ | Nm | 0 |
| S1 模式角加速度 αS1 | °/s² | 9000 |
| S6 运转 3 s 最大角加速度 αmax | °/s² | 20000 |
| 安全系数 SF | – | 1,4 |
计算(Calculation)
角加速度换算为 rad/s²:
公式 19:角加速度(Angular acceleration)
αS1 = (π / 180) · αS1 [°/s²] = (π / 180) · 9000 = 157 rad/s²
公式 20:最大角加速度(Max. angular acceleration)
αmax = (π / 180) · αmax [°/s²] = (π / 180) · 20000 = 349 rad/s²
马达选型依冷却零速扭矩 Tsw、S1 运转中运动扭矩 Tcw 与 S6 运转 Tp 进行。安全系数 SF 为 1.4 可确保位置能可靠维持,且控制系统能安全地对偏差做出反应。
公式 21:冷却零速扭矩(含水冷)(Cooled stall torque, with water cooling)
Tsw = ( TW + TF + TZ ) · 1,4 = 490 N
| 符号 | 单位 | 说明 |
|---|---|---|
| Tsw | Nm | 零速扭矩,冷却(Stall torque, cooled) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 轴承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
公式 22:冷却连续扭矩(含水冷)(Cooled continuous torque, with water cooling)
Tcw = ( J · αS1 + TW + TF + TZ ) · 1,4 = 1369 N
| 符号 | 单位 | 说明 |
|---|---|---|
| Tcw | Nm | 连续扭矩,冷却(Continuous torque, cooled) |
| J | kg·m² | 惯性矩(Mass moment of inertia) |
| αS1 | rad/s² | S1 运转之角加速度(Angular acceleration in S1 operation) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 轴承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
公式 23:峰值扭矩(Peak torque)
Tp = ( J · αmax + TW + TF + TZ ) · 1,4 = 2444 N
| 符号 | 单位 | 说明 |
|---|---|---|
| Tp | Nm | 峰值扭矩(Peak torque) |
| J | kg·m² | 惯性矩(Mass moment of inertia) |
| αmax | rad/s² | 最大角加速度(Max. angular acceleration) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 轴承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
计算结果得出下列需求:
- Tp = 2444 Nm
- Tcw = 1369 Nm
马达 RIB13-3P-690×50-Z4.2(Tp = 3627 Nm、Tcw = 2166 Nm、nlp = 61 min⁻¹)完全满足本范例计算的需求。
本范例使用速度控制。NC 旋转台应先以定义的转速起动。NC 旋转台随后以此转速加工工件。
若另需定位作业(如位置控制中的回转器),则 TP 时所需的转速必须增加 10 % 至 20 % 的安全系数。马达的极限转速 nlp 必须大于计算所得转速加上附加值的总和。
注意:本章所列数值、公式与范例皆取自 Schaeffler RE 1 型录技术原理章节。具约束力的资料以报价及交货图面为准。如有更改,恕不另行通知。