1.1 공식에 사용되는 기호 설명
참고
아래 표에는 본 장의 공식과 도표에 사용된 모든 기호, 단위 및 설명이 정리되어 있으며, 총 58개 항목입니다.
| 기호 | 단위 | 설명 |
|---|---|---|
| I | A | 모터 전류 |
| Ic eff | A | 실효 연속 전류, 비냉각 |
| Ic red | A | 감소된 연속 전류 |
| Icw eff | A | 실효 연속 전류, 냉각 |
| Icw2 eff | A | 연속 운전 시 고속 영역의 실효 연속 전류 |
| Ip eff | A | 실효 피크 전류 |
| Ipl eff | A | 실효 피크 전류, 선형 영역 |
| Iu eff | A | 실효 한계 전류 |
| J | kg·m² | 질량 관성 모멘트 |
| km | Nm/√W | 토크 모터의 모터 상수 |
| kT | Nm/A | 토크 상수 |
| n | min⁻¹ | 속도 |
| nlc | min⁻¹ | Ic eff 및 UDCL에서의 한계 속도 |
| nlp | min⁻¹ | Ip eff 및 UDCL에서의 한계 속도 |
| nlw | min⁻¹ | 변곡 속도(knee speed) |
| nlw2 | min⁻¹ | Icw2 eff 및 UDCL에서의 운전 속도 FS |
| nlw3 | min⁻¹ | 연속 운전 시 Icw2 eff 및 UDCL에서의 한계 속도 |
| nlwS1 | min⁻¹ | 정격 속도 S1, 냉각 |
| nmax | min⁻¹ | 최대 속도 |
| Pl | W | 전력 손실 |
| Pmax S1 | N | 최대 정격 출력 |
| R | Ω | 옴 저항 |
| t | s | 시간 |
| T | Nm | 토크 |
| tb | s | 정지 시간 |
| Tc | Nm | 연속 토크, 비냉각 |
| Tcw | Nm | 연속 토크, 냉각 |
| Tcw2 | Nm | Icw2 eff 및 nlw2에서의 토크 |
| Tcw3 | Nm | Icw2 eff 및 nlw3에서의 토크 |
| Teff | Nm | 실효 토크 |
| TF | Nm | 베어링 마찰 토크 |
| tm | s | 운동 시간 |
| Tmax | Nm | 최대 토크 |
| Tp | Nm | 피크 토크 |
| Tpl | Nm | 피크 토크, 선형 영역 |
| Tsafe eff | Nm | 실효 토크, 안전 계수 포함 |
| Tsafe max | Nm | 최대 토크, 안전 계수 포함 |
| Tsw | Nm | 구속 토크(stall torque), 냉각 |
| Tu | Nm | 한계 토크 |
| TW | Nm | 가공 토크 |
| TZ | Nm | 중량력(추가 토크) |
| UDCL | V | DC 링크 전압 |
| α | rad/s² | 각가속도 |
| αmax | rad/s² | 최대 각가속도 |
| αS1 | rad/s² | S1 운전 시 각가속도 |
| ϑ | °C | 온도 |
| ϑf | °C | 현재 공급 온도 |
| ϑmax | °C | 최대 허용 권선 온도 |
| ϑn | °C | 공칭 응답 온도 |
| ϑnf | °C | 공칭 공급 온도 |
| φ | ° | 운동 각도 |
| ω | rad/s | 각속도 |
| ωmax | rad/s | 최대 각속도 |
1.2 토크 모터의 장점
1.2.1 성능
운동 프로파일의 변환 불필요
기어나 커플링 요소로 인한 탄성, 백래시, 마찰, 히스테리시스가 구동 체인에 발생하지 않습니다.
다극 모터
다극 구조 덕분에 매우 높은 토크가 발생합니다. 이 토크는 속도 > 0에서 정격 속도까지 사용할 수 있습니다.
얇은 링 형상의 회전자
크고 자유로운 내경을 가진 얇은 링 형상의 설계는 모터 관성을 줄이고 높은 가속도를 얻을 수 있게 합니다.
직접 위치 측정
직접 위치 측정과 강성이 높은 기계 구조 덕분에 고정밀의 동적 위치 결정 작업이 가능합니다.
컨트롤러 호환성
Schaeffler Industrial Drives의 토크 모터는 시중의 일반적인 모든 서보 드라이브와 함께 운전할 수 있습니다.
1.2.2 운전 비용
추가 가동부 없음
추가 가동부가 없으므로 구동 유닛의 조립, 조정 및 예방 보전이 용이합니다.
구동 체인의 최소 마모
구동 체인은 매우 높은 교번 하중 하에서도 내구성이 매우 뛰어납니다. 적은 마모량은 기계의 가동 정지 시간을 줄여 줍니다.
높은 가용성
수명 증가와 마모 감소 외에도, 토크 모터의 견고한 설계는 기계 전체의 가용성도 높여 줍니다.
에너지 효율
발열을 최소화하여 서보 드라이브와 냉각기의 에너지를 절약합니다.
1.2.3 설계
중공축
대구경 중공축을 통해 축, 로터리 디스트리뷰터, 매체 라인 등 다른 조립체를 통합하거나 통과시킬 수 있습니다. 베어링 평면, 힘 발생부 및 실제 작업 영역을 모두 서로 가깝게 배치할 수 있습니다.
고정자(primary part)의 설치
고정자용 링은 점유 공간이 작아 기계 구조에 쉽게 통합할 수 있습니다.
낮은 단면 높이
크고 자유로운 내경 덕분에 높은 토크를 가지면서도 매우 콤팩트하고 축 방향으로 짧은 구조를 구현할 수 있습니다.
적은 부품 수
고도로 엔지니어링된 설계는 모터 구성 요소를 기계 조립에 더 쉽게 통합할 수 있게 합니다. 부품 수가 적고 견고한 설계는 고장률을 낮추고 평균 고장 간격(MTBF)을 늘려 줍니다.
1.3 토크 모터의 특성
토크 모터는 고정자와 회전자로 구성됩니다. 고정자에는 활성 코일 시스템이 들어 있고, 회전자에는 영구자석 시스템이 들어 있습니다. 동심 배치에서 회전자는 내측 회전자 모터의 경우 내측 링이 될 수도 있고, 외측 회전자 모터의 경우 외측 링이 될 수도 있습니다. 통전된 고정자는 전자기력의 작용으로 회전자에 힘을 발생시킵니다.
베어링이 고정자와 회전자 사이의 공극(에어 갭)을 유지합니다. 또한 회전자의 위치를 검출하기 위한 측정 시스템도 필요합니다. 다양한 적용 요구사항에 대응하기 위해, 매우 다양한 고정자와 회전자를 갖춘 여러 모터 시리즈가 개발되었습니다.
구조적 설계 측면에서 토크 모터는 기본적으로 적층 철심(라미네이션 스택)이 있는 모터와 없는 모터, 즉 무철심(ironless) 모터로 나눌 수 있습니다. 그 외에도 내측 회전자 또는 외측 회전자로서의 회전자 위치 및 구성, 또는 자석 시스템에 따라 구분할 수 있습니다. 예를 들어 RIB 시리즈처럼 자석을 강철 링 표면에 접착할 수도 있고, RKIB 시리즈처럼 적층 철심에 매립할 수도 있습니다. 후자는 매립형 자석(buried magnets)이라고도 합니다. 이러한 모터는 넓은 속도 범위에 걸쳐 일관되게 높은 토크를 발생시킵니다. 토크는 고정자와 회전자 사이의 유효 공극 면적과 구조에 의해 결정됩니다. 설계자는 출력 요구사항에 따라 모터 조립체를 선정해야 합니다. 일반적인 전동기는 출력에 따라 분류되지만, 토크 모터는 이와 달리 필요한 토크에 따라 분류됩니다.
표 1: 토크 모터의 특성
| 모터 시리즈 | 특성 |
|---|---|
| RIB |
높은 토크 밀도의 내측 운전형 모터
|
| RKI 및 RKIB |
높은 출력 밀도의 내측 운전형 모터
|
1.4 모터의 일반 특성값
1.4.1 효율 기준
토크 모터의 전력 손실은 권선과 크기에 따라 성능 데이터에 기재됩니다. 토크 모터는 정지 상태에서도 높은 토크를 발생시키지만 기계적 출력은 발생시키지 않습니다. 따라서 효율을 명시할 이유가 없습니다.
다만 모터 상수 km은 효율 비교에 사용할 수 있습니다. 모터 상수 km은 토크와 그 토크에서 발생하는 동손(구리 손실) 사이의 관계를 정의합니다. 전력 손실은 모터를 가열합니다. 또한 모터 상수 km은 정지 상태 및 저속, 그리고 상온에서 선형 제어 영역에 대해 정확합니다.
모터의 온도가 상승하면 권선 저항 증가로 인해 효율이 감소합니다. 극 변환 주파수가 100 Hz 이상인 속도에서는 동손에 더하여 주파수 의존적인 히스테리시스 손실과 와전류 손실 형태의 철손이 추가됩니다. 철손은 모터 상수 km에 포함되지 않지만, 한계 속도 영역에서는 중요하므로 반드시 고려해야 합니다. 모터 상수 km은 토크–전류 특성 곡선의 선형 영역에만 해당합니다.
공식 1: 전력 손실
Pl = ( T / km )2
| 기호 | 단위 | 설명 |
|---|---|---|
| Pl | W | 전력 손실 |
| T | Nm | 토크 |
| km | Nm/√W | 모터 상수 |
모터 상수 km은 옴 저항, 따라서 모터 권선 온도에 의존합니다. 모터 상수 km은 성능 데이터에 +20 °C 기준으로 기재됩니다. 특성 곡선은 모터 상수를 온도의 함수로 나타냅니다.
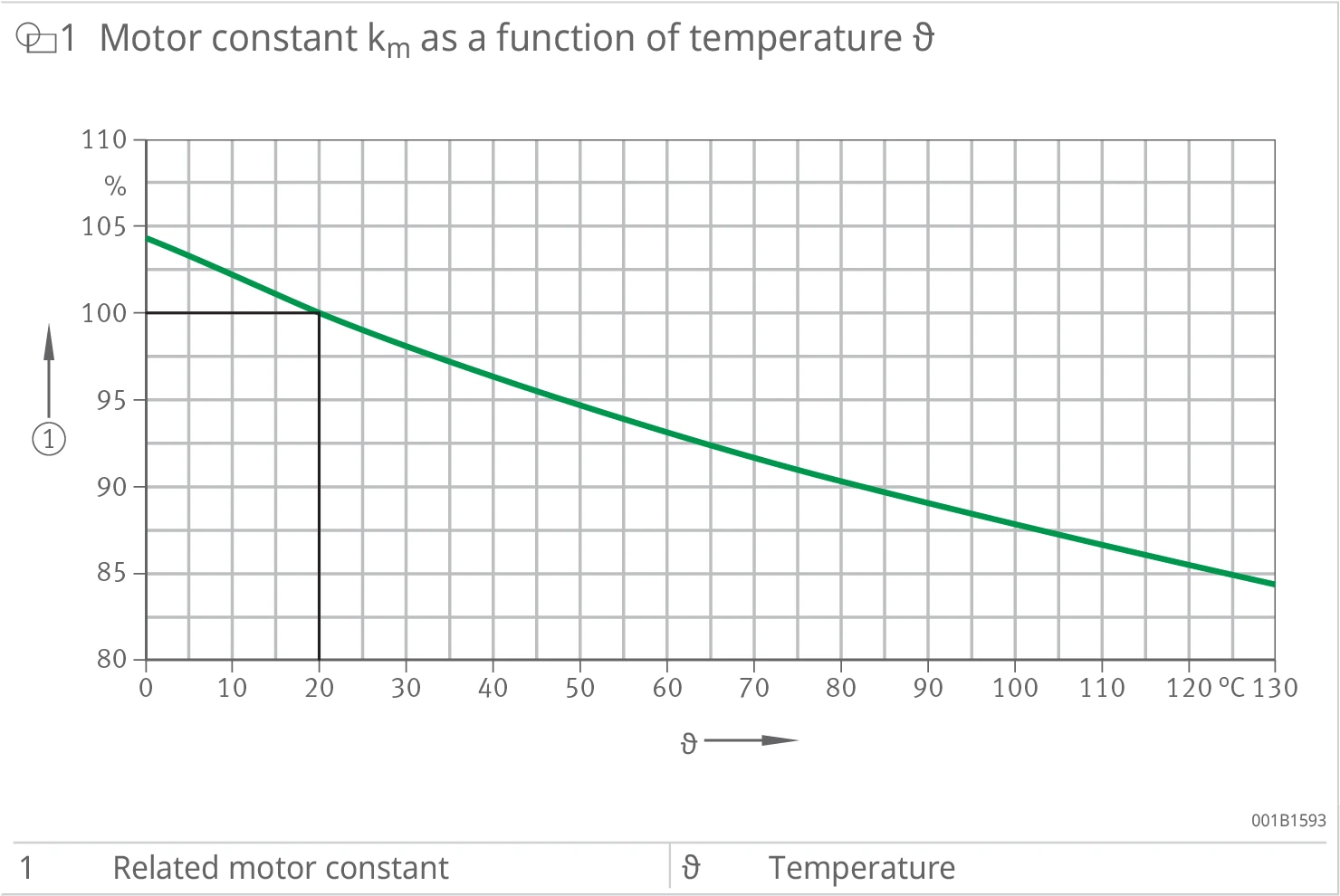
그림 1: 온도 ϑ의 함수로 나타낸 모터 상수 km. 세로축은 상대 모터 상수(%), 가로축은 온도 ϑ(°C)입니다. 곡선은 +20 °C에서 100%이며 온도가 상승할수록 감소하여 +130 °C에서 약 84%까지 떨어집니다. ①=상대 모터 상수, ϑ=온도.
열적 거동
온도가 상승하면 권선 저항이 증가하고, 이는 모터 상수 km을 감소시키는 효과를 가져옵니다. +130 °C에서 모터 상수 km은 정상값의 0.84배로 떨어집니다. 토크를 발생시키는 일정한 전류에서, 가열된 모터에서는 차가운 모터보다 더 큰 전력 손실이 발생합니다. 이 전력 손실은 모터 온도를 더욱 상승시킵니다.
1.4.2 권선 설계와 그 의존 관계
무엇보다도 시리즈가 토크 모터의 한계 속도를 결정합니다. 다음과 같은 설계가 가능합니다:
- RIB 토크 모터: 고정자는 적층 철심을 갖습니다. 회전자는 자석을 강철 링에 접착합니다.
- RKI 토크 모터 및 RKIB 토크 모터: 고정자는 적층 철심을 갖습니다. 회전자는 자석을 적층 철심에 매립합니다.
한 시리즈 내에서는 크기, DC 링크 전압, 권선 설계가 한계 속도에 영향을 줍니다.
모터 내부의 전압 강하는 속도가 증가함에 따라 전압 요구량을 증가시킵니다. 성능 데이터에 명시된 변곡 속도(knee speed)에서는 자속 지향 제어를 적용한 서보 컨버터의 DC 링크 전압과 전압 요구량이 일치하며, 그 이후로는 속도가 급격히 하락합니다. DC 링크 전압이 높을수록, 그리고 권선과 관련된 전압 상수 kû가 작을수록 달성 가능한 한계 속도가 높아집니다. 전압 상수와 토크 상수 사이에는 상관관계가 있으므로, 동일한 토크에서 더 높은 속도가 요구되면 모터의 출력 요구량이 증가합니다. 고정된 DC 링크 전압 UDCL에서, 서로 다른 한계 속도와 동적 요구사항에 대응하기 위해 하나 이상의 표준 권선이 미리 정의되어 있습니다.
1.4.2.1 DC 링크 전압의 변화
DC 링크 전압은 권선별 속도 한계에 영향을 줍니다. DC 링크 전압이 최대 ±10 % 변동하는 경우, 모터의 사전 선정을 위해 DC 링크 전압과 속도 한계 사이에 비례 관계를 가정할 수 있습니다. 고객별 DC 링크 전압에 대한 정확한 속도 한계는 Schaeffler Industrial Drives의 어플리케이션 엔지니어 및 영업 부서를 통해 확인할 수 있습니다.
DC 링크 전압이 낮아지면 한계 속도도 감소합니다. 토크–전류 특성 곡선은 여러 운전점에서의 토크를 나타냅니다. 토크–속도 특성 곡선은 다양한 운전점에서 토크와 속도의 관계를 나타냅니다.
토크–속도 곡선은 Schaeffler Industrial Drives의 어플리케이션 엔지니어와 영업 부서로부터 데이터 시트 형태로 제공받을 수 있습니다. 문의: sales-sid@schaeffler.com
1.4.3 토크/속도 특성 곡선
RIB 토크 모터
RIB 토크 모터의 토크–속도 특성 곡선은 일정한 DC 링크 전압에서 자속 약화(field weakening) 없이 토크의 함수로 권선별 속도 한계를 나타냅니다. 이 특성 곡선은 듀티 사이클이나 그에 따른 모터의 열적 거동을 설명하지 않습니다. 특성 곡선은 권선 온도 +20 °C에서 모터가 도달할 수 있는 영역만을 나타냅니다.
Tcw를 초과하는 토크의 운전점은 고정자의 과열을 방지하기 위해 시간 제한을 받습니다. Tu에서는 회전자 출력 온도가 과도하게 높아져 감자(demagnetisation)가 발생할 수 있습니다.
n > nlwS1에서는 추가적인 주파수 의존 손실로 인해 모터를 일정 시간 동안만 운전할 수 있습니다. 또는 연속 운전을 위해 전류를 감소시킬 수 있습니다. 냉각 시 정격 속도(S1) nlwS1은 모터 크기와 권선 설계에 따라 nlw와 같을 수도 있습니다.
Ic eff 및 Tc에서의 한계 속도 nlc는 특성 곡선을 이해하는 데 중요하지만, 중요도가 낮아 성능 데이터에는 기재되지 않습니다.
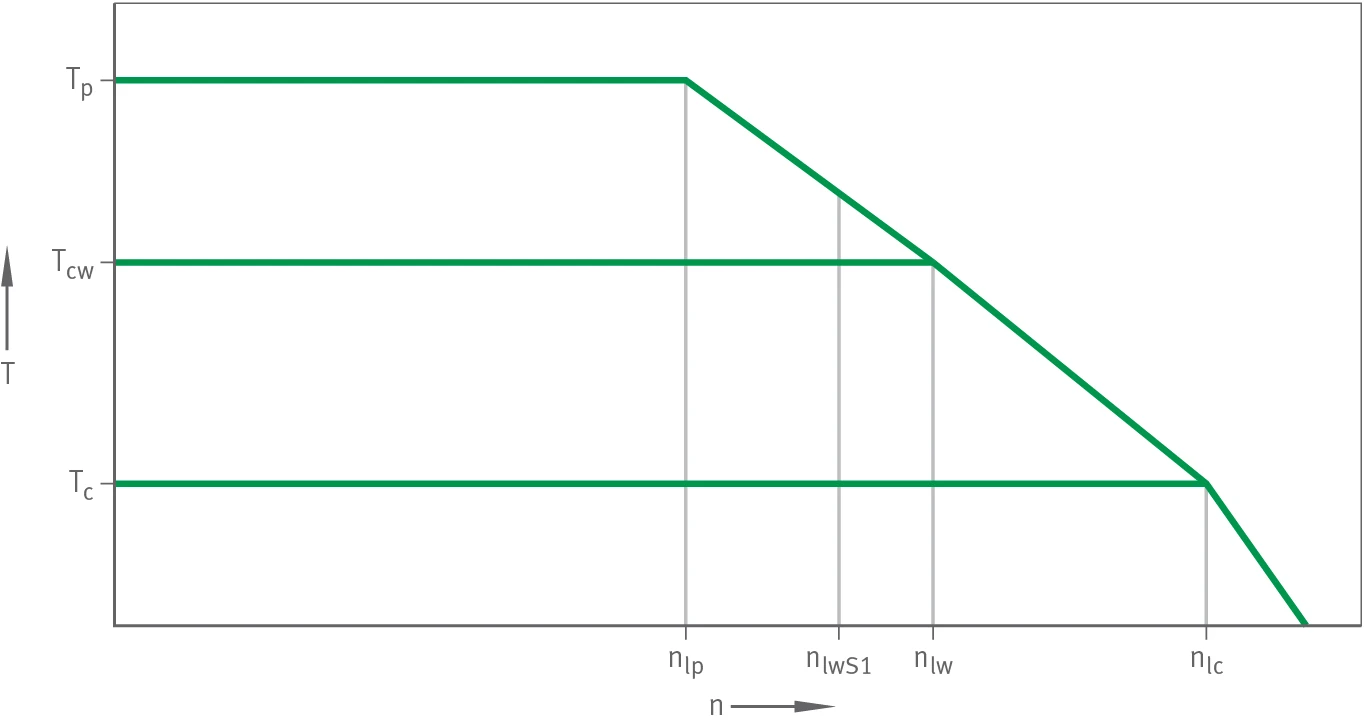
그림 2: RIB 토크 모터: 토크–속도 특성 곡선. 세로축은 토크 T, 가로축은 속도 n입니다. 곡선은 세 가지 토크 레벨 Tp, Tcw, Tc와 그에 대응하는 속도 한계 nlp, nlwS1, nlw, nlc를 나타냅니다. 기호 정의: T=토크, n=속도, Tc=연속 토크(비냉각), Tcw=연속 토크(냉각), Tp=피크 토크, nlc=Ic eff 및 UDCL에서의 한계 속도, nlp=Ip eff 및 UDCL에서의 한계 속도, nlw=변곡 속도, nlwS1=정격 속도 S1(냉각).
RKI 토크 모터 및 RKIB 토크 모터
연속 속도용 토크–속도 특성 곡선은 고속 및 일정한 DC 링크 전압에서 자속 약화를 적용하여 토크의 함수로 권선별 속도 한계를 나타냅니다. RKI 토크 모터와 RKIB 토크 모터는 특성 곡선에 표시된 운전점에서 연속적으로 운전할 수 있습니다.
연속 토크 Tcw에서의 운전은 속도 nlwS1까지 가능합니다. nlw2까지의 더 높은 속도에서는 연속 운전을 위해 전류를 Icw eff에서 Icw2 eff로 감소시켜야 합니다. 이때의 토크는 Tcw2입니다.
nlw2와 nlw3 사이에서도 최대 허용 연속 전류는 Icw2 eff입니다. 이에 따른 토크 변화는 권선과 회전자 구성에 따라 달라집니다. nlw3 및 Icw2 eff에서의 토크는 Tcw3입니다. 이 운전점에서의 기계적 출력은 Pmax S1입니다. nlw2와 nlw3 사이의 정확한 변화는 제품별 데이터 시트에서만 확인할 수 있으며, 이는 Schaeffler Industrial Drives에 요청해야 합니다.
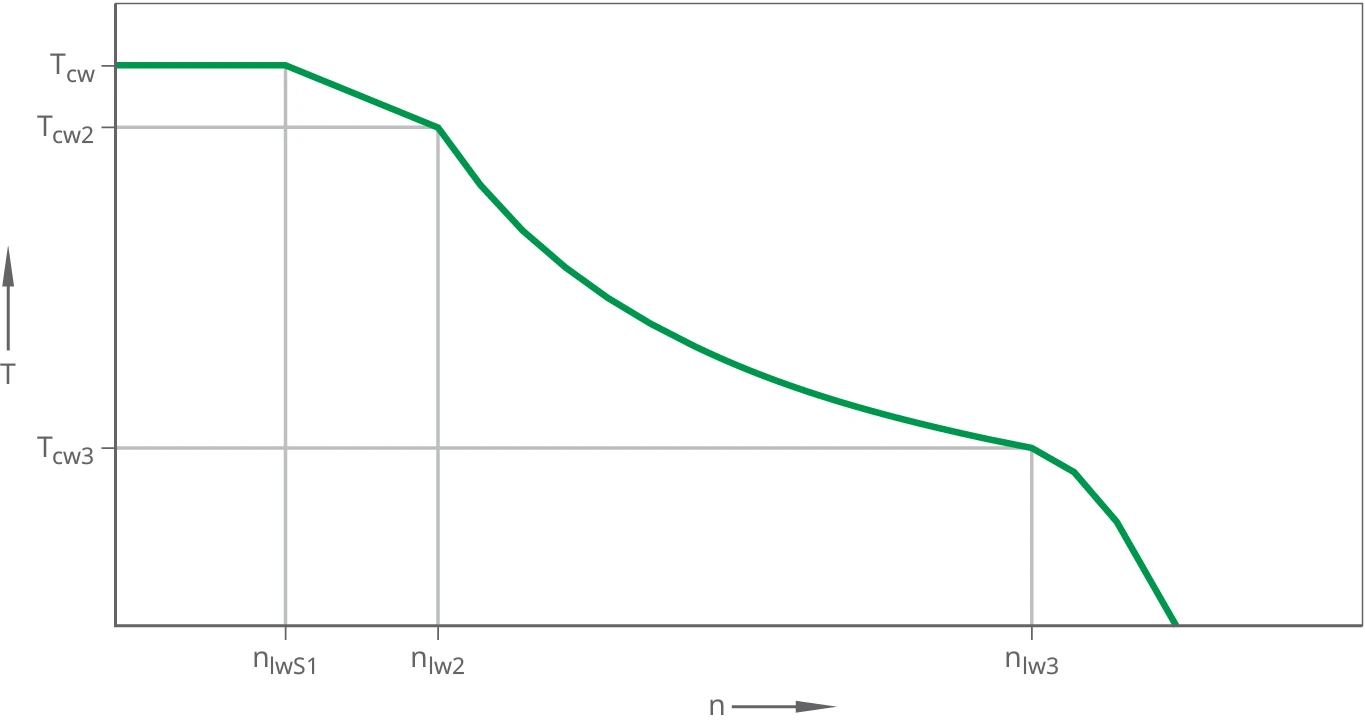
그림 3: RKIB 토크 모터: 연속 속도용 토크–속도 특성 곡선. 세로축은 토크 T, 가로축은 속도 n입니다. 곡선은 Tcw, Tcw2, Tcw3와 그에 대응하는 속도 한계 nlwS1, nlw2, nlw3을 나타냅니다. 기호 정의: n=속도, T=토크, Tcw=연속 토크(냉각), Tcw2=Icw2 eff 및 nlw2에서의 토크, Tcw3=Icw2 eff 및 nlw3에서의 토크, nlwS1=정격 속도 S1(냉각), nlw2=Icw2 eff 및 UDCL에서의 운전 속도 FS, nlw3=연속 운전 시 Icw2 eff 및 UDCL에서의 한계 속도.
제어 여유(control reserve): 명시된 모든 속도는 일정한 DC 링크 전압 UDCL을 기준으로 합니다. 안정화된 DC 링크가 없는 주파수 인버터에서는 UDCL이 일정하지 않습니다. 따라서 운전점에는 DC 링크 전압 변동을 고려한 제어 여유를 두어야 합니다. 일반적으로 안정화된 DC 링크가 없는 주파수 인버터에서는, 운전점에서의 속도가 해당 운전점에서 모터가 도달 가능한 속도의 약 80 %를 초과하지 않아야 합니다.
1.4.4 토크/전류 특성 곡선
0 A에서 선형 피크 전류 Ipl eff 사이의 모터 전류는 선형적으로 비례하는 토크를 발생시킵니다. 피크 전류 Ipl eff는 선형 피크 토크 Tpl을 발생시킵니다. 모터 상수 km은 0 A에서 Ipl eff 사이 영역의 전력 손실 계산에 적합합니다. 이 영역에서는 토크 상수 kT를 사용하여 전류로부터 토크를 계산하거나 그 반대로 계산합니다.
선형 피크 전류 Ipl eff의 값은 온도와 무관합니다. 그 값은 시리즈와 권선 설계에 따라 달라집니다. 냉각 연속 전류 Icw eff보다 작을 수도, 클 수도 있습니다. 선형 피크 전류 Ipl eff와 그에 따른 선형 피크 토크 Tpl은 특성 곡선을 이해하는 데 중요합니다. 다만 이 값들은 실무적 의미가 거의 없으므로 성능 데이터에는 기재되지 않습니다.
토크–전류 특성 곡선은 I > Ip eff에서 더 이상 선형이 아닙니다. 모터 자기 회로의 포화가 이 비선형성을 야기합니다. Ip eff에서의 토크–전류 점 Tp와 Iu eff에서의 Tu 사이에서 특성 곡선은 비선형이 됩니다. 이 영역에서는 곡선의 기울기가 가변적이며 토크 상수 kT의 값보다 현저히 낮습니다.
모터는 운전점 Tp, Ip eff까지 몇 초 동안 운전할 수 있습니다. 이는 가속 과정의 최대 운전점입니다. 영구자석의 감자 위험으로 인해, 모터는 한계점 Tu, Iu eff를 초과하여 운전해서는 안 됩니다.
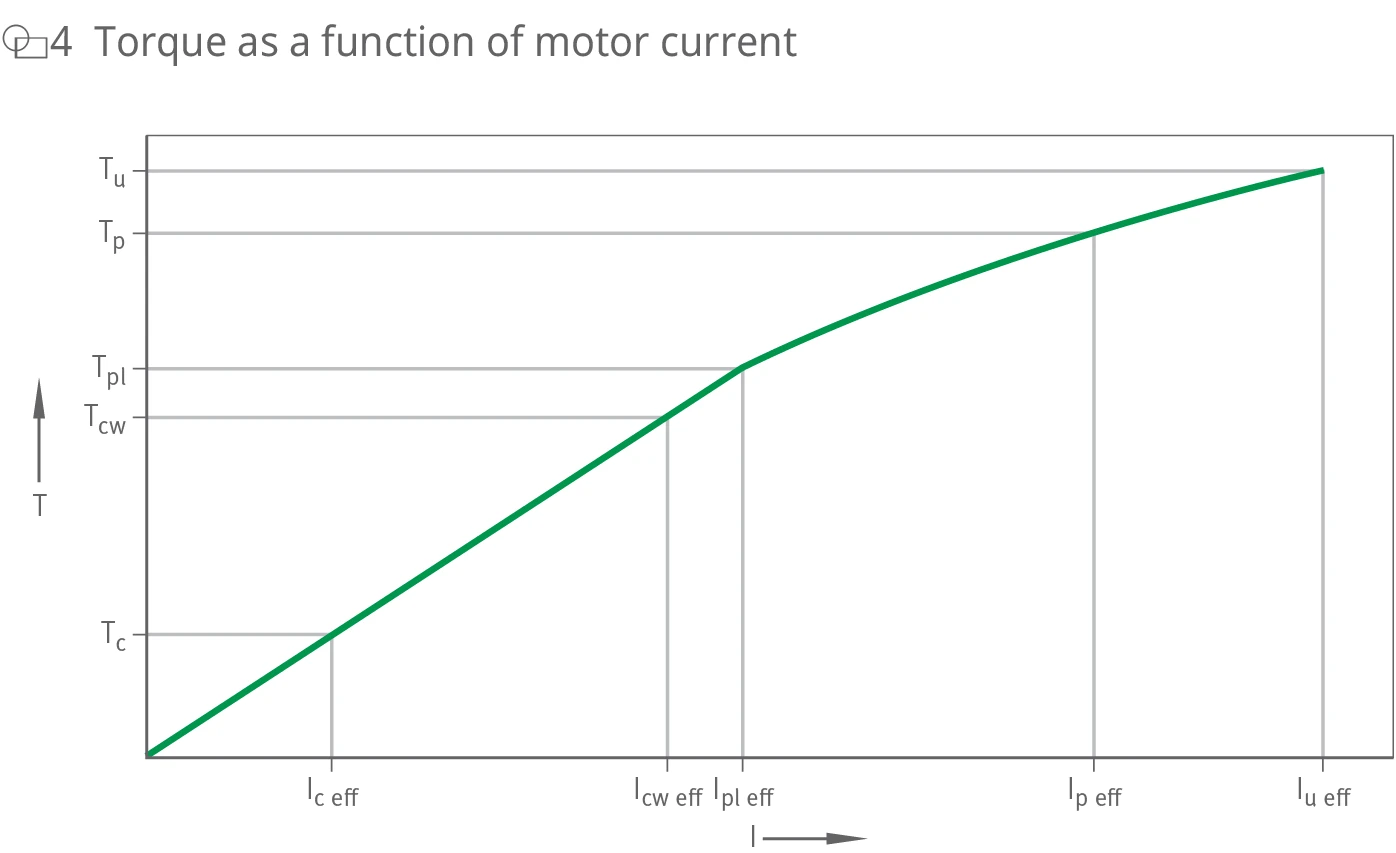
그림 4: 모터 전류의 함수로 나타낸 토크. 세로축은 토크 T, 가로축은 모터 전류 I입니다. 곡선은 0과 Ip eff 사이에서 선형이며, 그 이후로는 자기 포화로 인해 비선형이 되어 Tu, Iu eff까지 이어집니다. 토크 레벨 Tc, Tcw, Tpl, Tp, Tu와 전류점 Ic eff, Icw eff, Ipl eff, Ip eff, Iu eff가 표시되어 있습니다.
1.5 모터의 열 보호
1.5.1 모니터링 회로 I 및 II
사용자는 다이렉트 드라이브를 열 성능 한계에서 운전하는 경우가 많습니다. 또한 운전 중에 예측 불가능한 과부하가 발생할 수 있습니다. 과부하는 허용 연속 전류보다 높은 전류 부하를 초래합니다. 과부하 시 실효 모터 전류, 즉 제곱 평균값 I²t는 허용 연속 모터 전류를 초과해서는 안 됩니다. 단시간 과전류에 대비하여 전력 전자장치에는 모터 전류를 제어할 수 있는 I²t 모터 보호 모델이 있어야 합니다. 이 간접 온도 모니터링은 매우 빠르고 신뢰성이 높습니다. 모터 시운전 시 사용자는 I²t 모니터링이 켜져 있는지 반드시 확인해야 합니다.
Schaeffler Industrial Drives의 모터는 모터 온도 모니터링을 통해 보호되어야 합니다. 표준 사양의 모니터링 회로 I에는 3상 권선에 직렬로 연결된 3개의 PTC 센서가 포함되어 있습니다. 모니터링 회로 II에는 모터 내 한 상에 Pt1000 센서가 추가로 포함됩니다. 이 센서는 사전 경고 임계값을 설정할 수 있게 합니다.
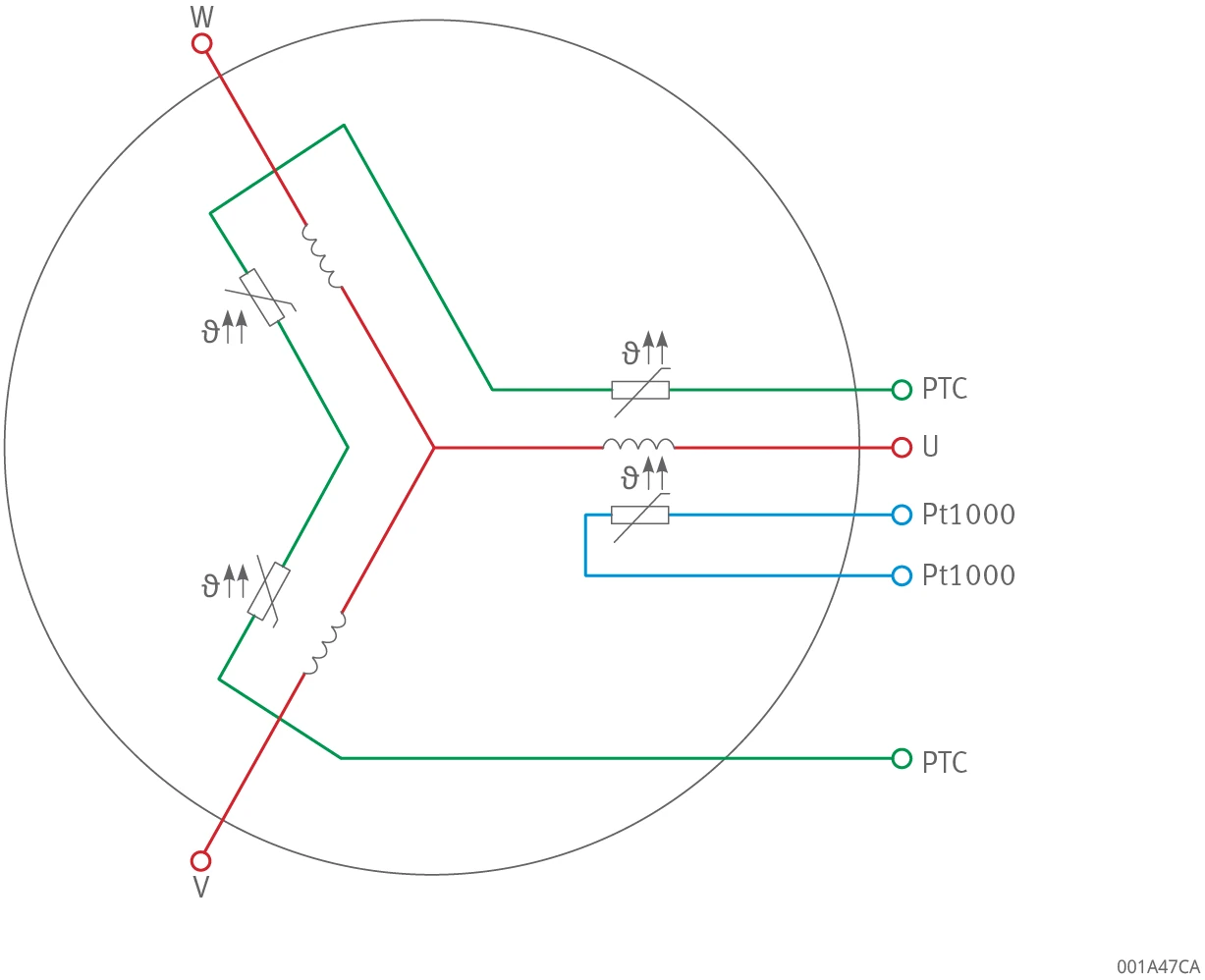
그림 5: 3중 PTC 및 Pt1000의 표준 결선. 모터의 3상 U, V, W 권선에 직렬로 연결된 3개의 PTC 센서와 한 상의 Pt1000 센서의 결선 단자 배치를 나타냅니다.
PTC 및 Pt1000 센서는 모터로부터 기본 절연(basic isolation)되어 있습니다. 이 센서는 DIN EN 61800-5-1에 따른 PELV 회로 또는 SELV 회로에 직접 연결하기에 적합하지 않습니다.
1.5.2 모니터링 회로 I
PTC는 서미스터입니다. PTC의 열 시정수는 수 초입니다. Pt1000과 달리 PTC의 저항은 공칭 응답 온도 ϑn을 초과하면 매우 급격히 상승합니다. 공칭 응답 온도를 초과하면 저항이 냉간 값의 수 배로 증가합니다.
3중 PTC, 즉 3개의 PTC 센서를 직렬로 연결하여 사용하면 총 저항이 크게 변합니다. 이 큰 변화는 단 하나의 센서만 응답 온도 ϑn을 초과해도 발생합니다. 3개의 PTC 센서를 사용하면 정지 상태 등 비대칭 상 부하 하에서도 서미스터 모터 보호 릴레이를 통해 모터를 안전하게 정지시킬 수 있습니다. 서미스터 모터 보호 릴레이는 일반적으로 1.5 kΩ에서 3.5 kΩ 사이에서 트립되어 컨트롤러 정지를 트리거합니다.
PTC 센서는 각 권선의 과온을 수 도(°)의 편차로 검출합니다.
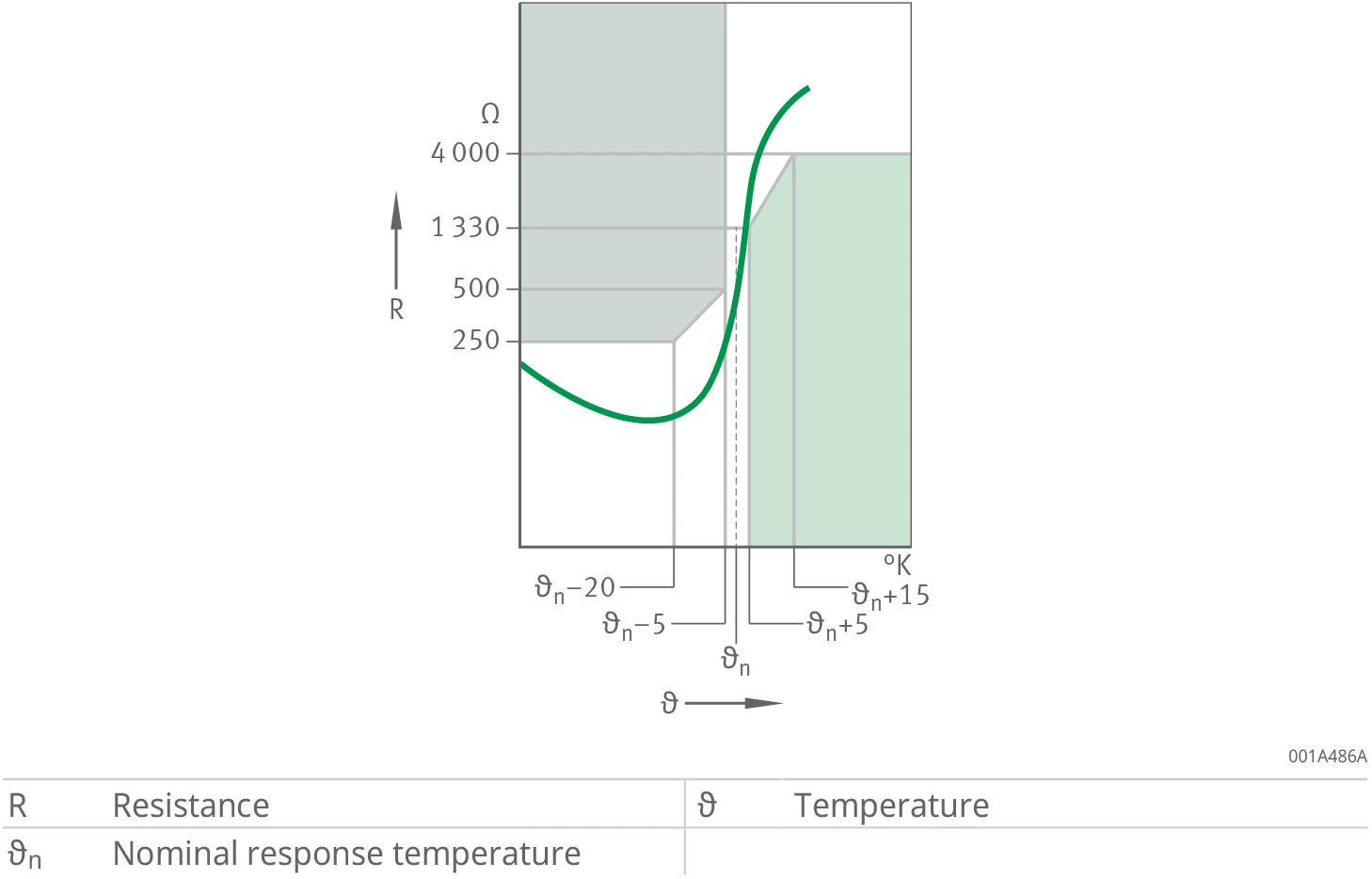
그림 6: PTC 온도 특성. 세로축은 저항 R(Ω), 가로축은 온도 ϑ입니다. 저항은 공칭 응답 온도 ϑn 이하에서는 낮고, 이를 초과하면 급격히 상승합니다. 저항 레벨 250, 500, 1330, 4000 Ω과 온도 구간 ϑn−20, ϑn−5, ϑn, ϑn+5, ϑn+15가 표시되어 있습니다. 기호 정의: R=저항, ϑ=온도, ϑn=공칭 응답 온도.
서미스터 모터 보호 릴레이는 PTC 회로의 저항이 너무 낮은 경우에도 응답합니다. 지나치게 낮은 저항은 모니터링 회로의 결함을 나타낼 수 있습니다. 서미스터 모터 보호 릴레이는 모터 내 PTC 센서로부터 컨트롤러를 안전하게 갈바닉 절연합니다. 서미스터 모터 보호 릴레이는 모터의 공급 범위에 포함되지 않습니다. 온도 모니터링 회로 I의 PTC 센서는 온도 측정에 적합하지 않습니다. 모니터링 회로 II는 온도 측정에 적합합니다.
원칙적으로 서보 컨버터에 연결된 서미스터 모터 보호 릴레이가 모터의 온도 보호를 위해 PTC 센서를 평가해야 합니다.
1.5.3 모니터링 회로 II
Pt1000은 백금 측정 저항 온도 센서입니다. 이 센서는 백금의 전기 저항이 온도에 의존하는 성질을 이용합니다. EN 60751이 센서 특성을 규정합니다.
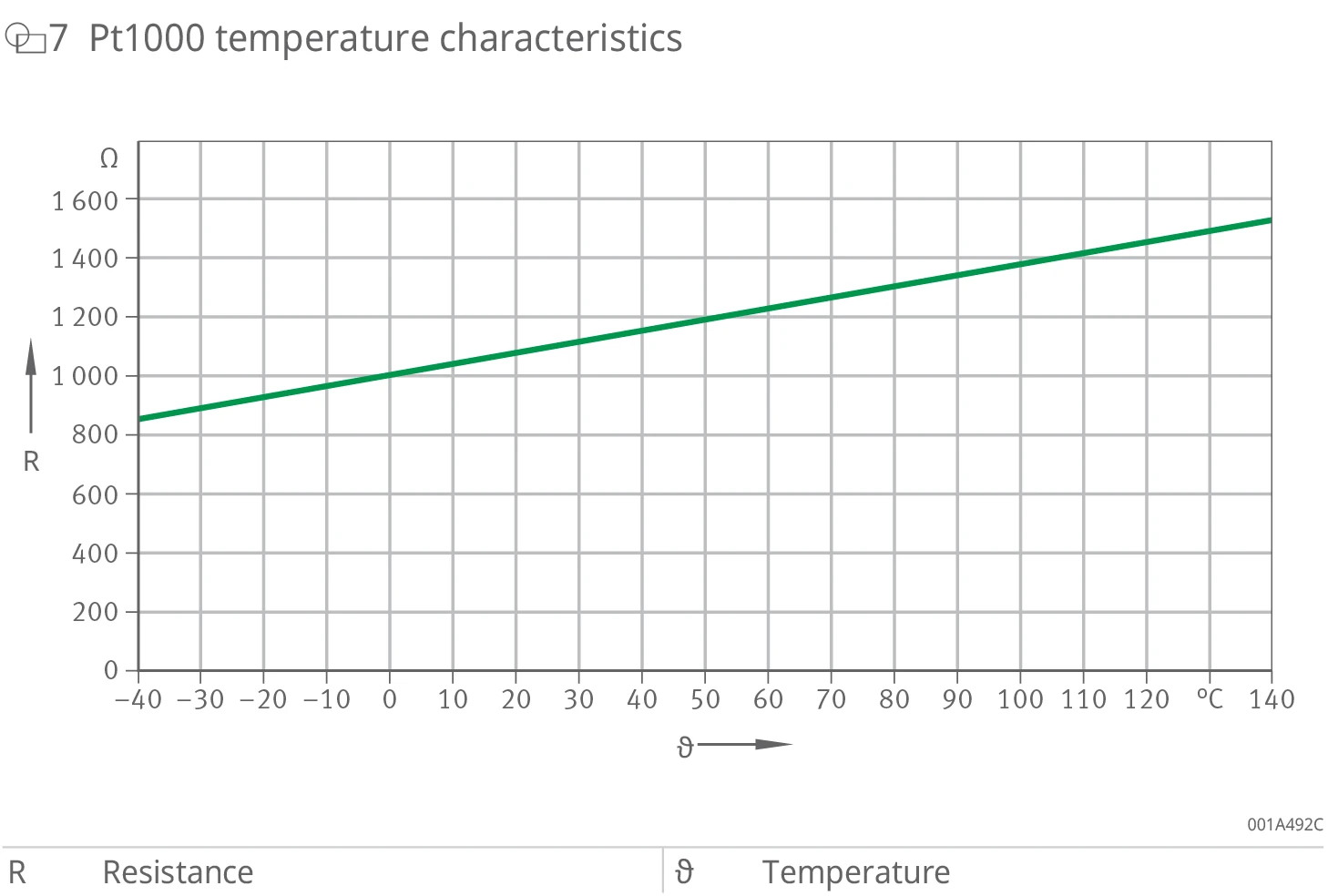
그림 7: Pt1000 온도 특성. 세로축은 저항 R(Ω), 가로축은 온도 ϑ(−40 ~ +140 °C)입니다. 곡선은 약 800 Ω(−40 °C)에서 약 1540 Ω(+140 °C)까지 선형으로 상승합니다. 기호 정의: R=저항, ϑ=온도.
설치 상태에서의 열 시정수는 수 초입니다. 사전 경고 임계값과 차단 한계값을 컨트롤러에 입력하여 모터를 과온으로부터 보호합니다. 사전 경고 임계값은 서미스터 모터 보호 릴레이에 의한 즉각적인 차단을 방지합니다.
정지 상태에서는 적용 조건에 따라 모터 권선에 일정한 전류가 흐를 수 있습니다. 극 위치가 이 일정 전류의 크기를 결정합니다. 이러한 의존성으로 인해 모터가 균일하게 가열되지 않습니다. 모니터링되지 않는 권선은 과열될 수 있습니다. Pt1000 센서 1개는 한 상만 모니터링할 수 있습니다. 3개의 Pt1000 센서를 사용하고 평가하면 모든 상을 모니터링할 수 있습니다. 정지 상태에서 정기적으로 하중 한계에 도달하는 적용의 경우, Schaeffler Industrial Drives는 3개의 Pt1000 센서를 사용하고 평가할 것을 권장합니다.
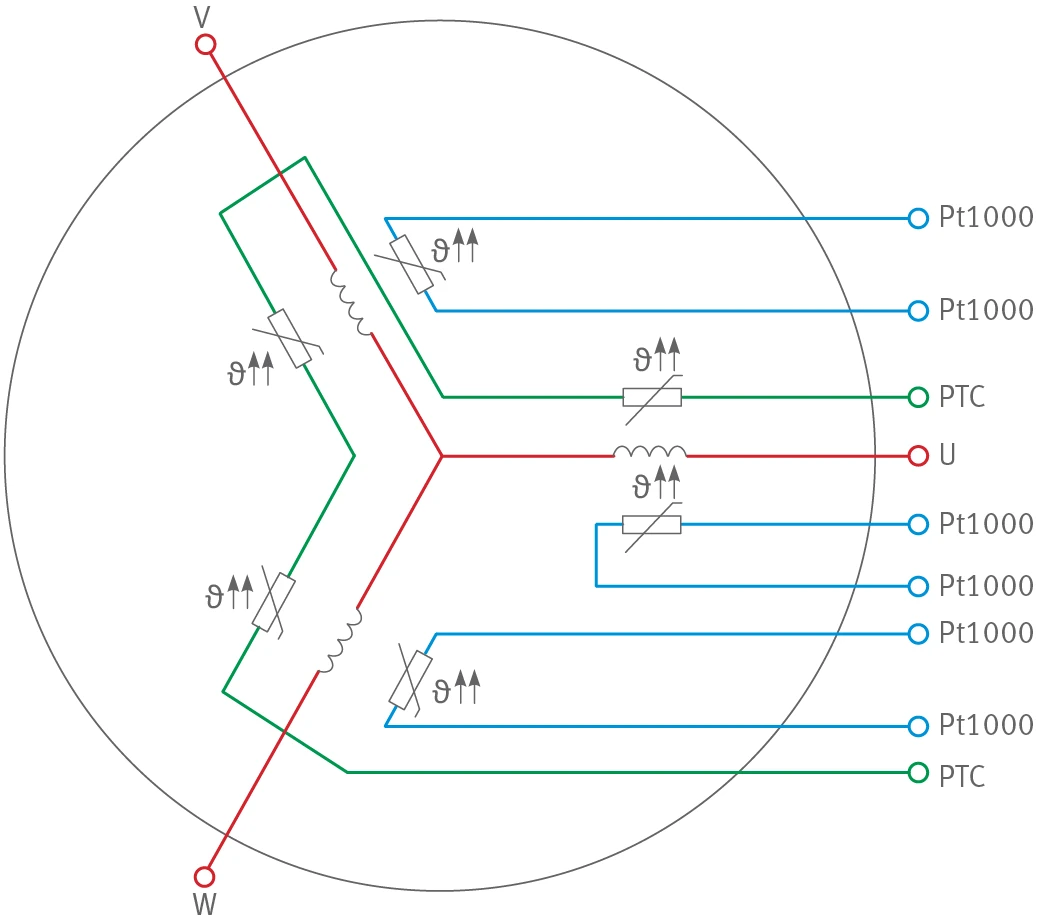
그림 8: 3중 PTC 및 3개 Pt1000의 결선. 모터의 3상 V, U, W 권선에 연결된 3중 PTC(직렬)와 3개 Pt1000 센서의 결선 단자 배치를 나타냅니다.
1.6 전기 결선 기술
1.6.1 표준 케이블 결선
Schaeffler Industrial Drives 모터의 표준 케이블 결선에는 축 방향 나사 결합이 적용됩니다. RIB 토크 모터의 경우, 냉각 연결부에 대한 상대 위치는 케이블 인출부의 중앙에 있습니다. 케이블 인출부가 여러 개인 RKI 토크 모터 및 RKIB 토크 모터의 경우, 상대 위치를 일률적으로 정의할 수 없습니다. 견적 및 납품 도면과 3D 모델이 우선하며 구속력 있는 위치를 제공합니다.
RIB 토크 모터는 2 m 케이블과 함께 공급됩니다. 케이블 길이는 모터 인출부에서부터 측정합니다. RKI 토크 모터 및 RKIB 토크 모터는 2 m 또는 5 m 케이블과 함께 공급됩니다. 맞춤형 케이블 길이도 가능합니다.
전원 연결 케이블의 단면적은 모터의 연속 전류에 따라 달라집니다. 표준적으로 치수는 Plw(냉각)에서의 연속 전류 Icw eff를 기준으로 결정됩니다. 축 방향, 반경 방향, 접선 방향 케이블 인출이 사용될 수 있습니다. 원하는 케이블 인출 방향은 주문 시 정의합니다. 70 A를 초과하는 모터 전류의 경우, 케이블 인출은 해당 적용에 맞게 조정됩니다.
케이블은 다음과 같은 특성을 갖습니다:
- 차폐
- 폴리우레탄 외피 덕분에 오일 및 냉각제에 대한 내성
- 난연성
- 드래그 체인 사용에 적합
케이블 끝단은 표준 사양에서 페룰이 부착된 개방형입니다. 적용별 케이블 인출도 가능합니다.
표 2: 모터 케이블 결선, 표준
| 단면적 | 연속 전류 | 직경 | 최소 굽힘 반경, 고정 | 최소 굽힘 반경, 유연 | 질량 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4G0,75 | 10,4 | 8 | 40 | 80 | 95 |
| 4G1,5 | 16,1 | 9 | 45 | 90 | 140 |
| 4G2,5 | 22 | 10,5 | 52,5 | 105 | 210 |
| 4G4 | 30 | 12,5 | 62,5 | 125 | 296 |
| 4G6 | 37 | 14,5 | 72,5 | 145 | 416 |
| 4G10 | 52 | 17 | 85 | 170 | 644 |
| 4G16 | 70 | 20,5 | 102,5 | 205 | 997 |
표 3: 모터 결선 단자 할당
| 명칭 | 할당 |
|---|---|
| 1/U | U상 |
| 2/V | V상 |
| 3/W | W상 |
| GNYE | PE |
센서 케이블은 PTC 및 Pt1000 센서를 통한 온도 모니터링을 가능하게 합니다. 케이블 끝단은 표준 사양에서 페룰이 부착된 개방형입니다. 적용별 케이블 인출도 가능합니다.
표 4: 센서 케이블 결선, 표준
| 단면적 | 온도 모니터링 | 직경 | 최소 굽힘 반경, 고정 | 최소 굽힘 반경, 유연 | 질량 |
|---|---|---|---|---|---|
| – | – | mm | mm | mm | g/m |
| 센서 4×0,14 | P 1) | 4,8 | 24 | 36 | 40 |
| 센서 7×0,14 | – | 5,7 | 29 | 43 | 67 |
| 센서 10×0,14 | T 2) | 6,7 | 34 | 50 | 87 |
1) P = 1 Pt1000 + 3 PTC 2) T = 3 Pt1000 + 3 PTC
표 5: 결선 단자 할당, 센서 사양 P
| 명칭 | 할당 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000 |
| YE | Pt1000 |
표 6: 결선 단자 할당, 센서 사양 T
| 명칭 | 할당 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000-1 |
| YE | Pt1000-1 |
| GY | Pt1000-2 |
| PK | Pt1000-2 |
| BU | Pt1000-3 |
| RD | Pt1000-3 |
1.6.2 특수 케이블 결선
RKI 토크 모터 및 RKIB 토크 모터의 경우, 특정 상황에서는 차폐된 단선(single wire)을 사용하는 것이 합리적일 수 있습니다. 선택된 전선과 그 위치는 견적 및 납품 도면과 견적 회로도에서 확인할 수 있습니다. 단선의 일반 특성값은 표에서 확인할 수 있습니다.
표 7: 모터 케이블 결선, 특수 사양
| 단면적 | 연속 전류 | 직경 | 최소 굽힘 반경, 고정 | 최소 굽힘 반경, 유연 | 질량 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4×(1×2,5) | 22 | 4×6 | 24 | 45 | 4×58 |
| 4×(1×4) | 30 | 4×6,5 | 26 | 49 | 4×77 |
| 4×(1×6) | 37 | 4×7 | 28 | 53 | 4×101 |
| 4×(1×10) | 52 | 4×8,5 | 34 | 64 | 4×146 |
| 4×(1×16) | 70 | 4×10 | 40 | 75 | 4×223 |
| 4×(1×25) | 88 | 4×12 | 48 | 90 | 4×329 |
| 4×(1×35) | 110 | 4×13 | 52 | 98 | 4×444 |
1.6.3 모터의 정방향 회전 방향
전기적 정방향 회전 방향은 모든 3상 모터에서 시계 방향으로 회전하는 자계에 해당하며, 즉 상 전압이 U, V, W 순서로 유도됩니다. Schaeffler Industrial Drives 모터는 회전자 운동에 대해 다음과 같은 정방향 회전 방향을 갖습니다:
- 케이블 인출부 쪽을 위에서 볼 때 반시계 방향
- 케이블 인출부 반대쪽을 아래에서 볼 때 시계 방향
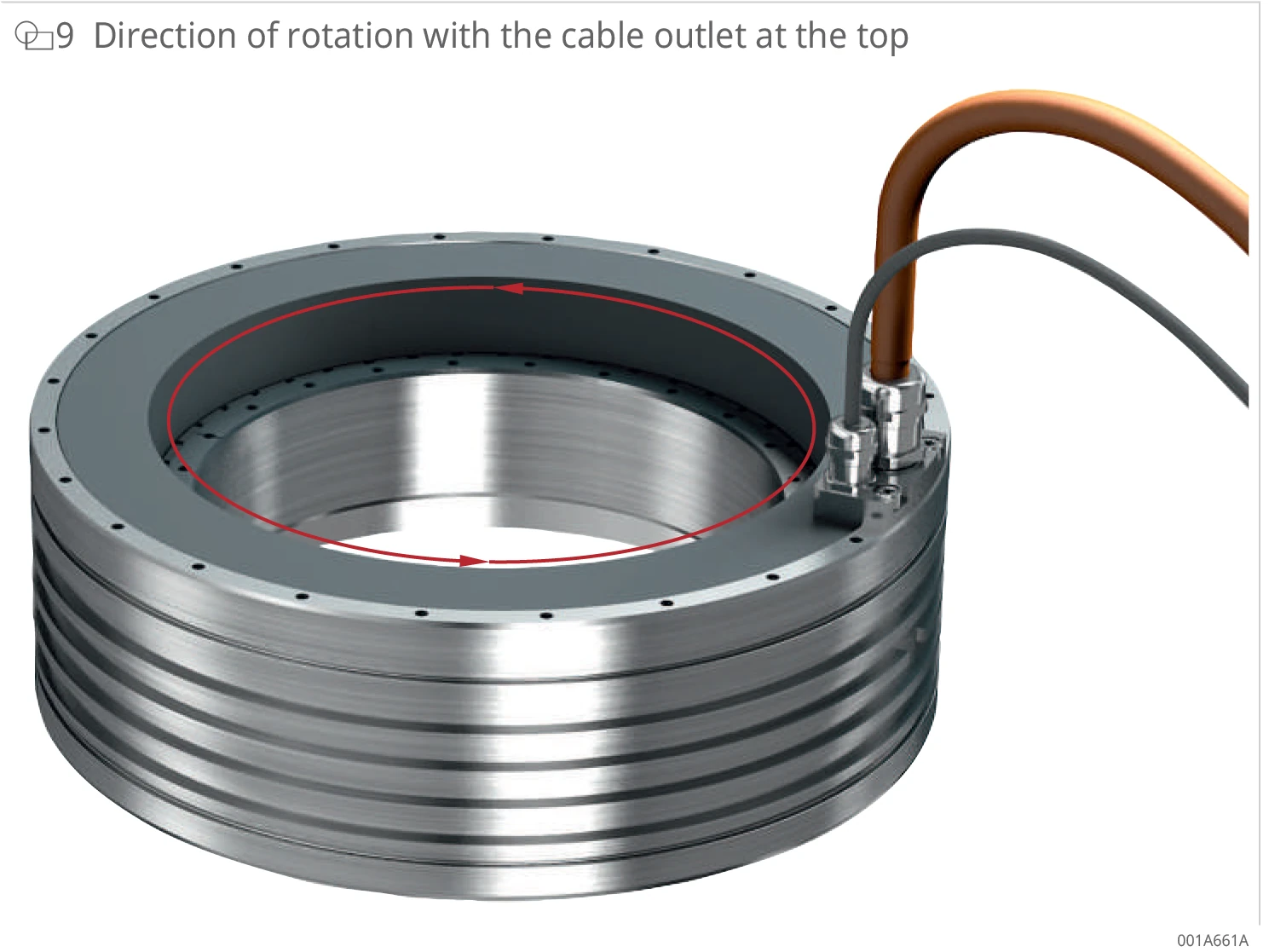
그림 9: 케이블 인출부가 위쪽에 있을 때의 회전 방향. 모터 사진은 회전자 운동에 대한 회전 방향(빨간 화살표, 반시계 방향)을 표시합니다.
1.6.4 정류(Commutation)
동기 모터는 가능한 한 정류를 적용하여 운전해야 합니다. Schaeffler는 측정 시스템을 기반으로 한 정류를 권장하는데, 이는 최신 서보 드라이브와 컨트롤러에서 지원되기 때문입니다.
1.6.5 절연 강도 및 과전압 현상
Schaeffler Industrial Drives는 다음 지침에 따라 모터를 개발, 설계, 제조합니다: 2014/35/EU, 특정 전압 한계 내에서 사용하기 위한 전기 장비. 모터는 다음 지침의 요구사항을 충족합니다: 2014/30/EU, 전자기 적합성. 이 모터는 DIN EN 61800-5-1에 따른 PDS(power drive system)에서 의도된 운전에 사용되도록 설계되었습니다.
모터의 절연 시스템은 과전압 카테고리 III에 맞게 설계되었으며 최대 수명을 위해 최적화되었습니다. 절연 시스템의 절연 강도는 납품 전에 검사됩니다. 부분 방전 개시 전압 측정과 같은 최신 시험 방법은 장기간에 걸친 모터의 수명과 성능을 보장합니다.
설치된 상태에서 모터는 PDS의 일부이며, PDS는 모터, 모터 케이블, 그리고 공급 모듈, 회생 모듈, 드라이브 컨트롤러, 필터와 같은 컨버터 구성 요소로 이루어집니다. PDS 내부에서는 원하지 않고 예측 불가능한 영향이 발생할 수 있습니다. 컨트롤러 제조업체는 사용자가 준수해야 하는 권장 사항과 프로젝트 계획 정보를 제공하는 경우가 많습니다. 이를 따르지 않으면 모터 또는 컨버터 절연 시스템의 조기 고장으로 이어질 수 있습니다.
다음 조치는 컨버터와 무관하게 더 안전한 운전을 보장합니다:
- 짧은 케이블 및 넓은 면적의 케이블 차폐 지지: 짧은 케이블과 넓은 면적의 케이블 차폐 지지/접촉은 모터 케이블에서의 고주파 반사로 인한 과전압을 방지하는 데 도움이 됩니다. 모터와 컨버터 사이의 케이블 길이가 10 m 이상인 모터 케이블은 과전압 발생 확률을 높입니다. Schaeffler Industrial Drives는 기계 시운전 시 적합한 고전압 기술을 사용하여 모터 연결 단자의 전압을 측정할 것을 권장합니다.
- 올바른 모터 선정: 모터는 컨버터의 DC 링크 전압에 따라 선정해야 합니다. 대부분의 경우 DC 링크 전압은 600 V입니다. DC 링크 전압이 낮으면 동적 응답과 최대 속도가 감소합니다. DC 링크 전압이 720 V 이상이거나 설치 고도가 2000 m를 초과하는 경우에는 강화 절연 시스템이 필요합니다. 이러한 경우 Schaeffler Industrial Drives에 문의하십시오. 상간 측정 인덕턴스가 50 mH를 크게 초과하는 모터는 컨버터 제조업체와 Schaeffler Industrial Drives의 개별 검토를 거친 후에만 사용할 수 있습니다. 그렇지 않으면 전압 스파이크가 PDS(power drive system)에 공진을 일으켜 절연 시스템을 손상시킬 수 있기 때문입니다.
컨버터 제조업체의 지침을 준수해야 합니다. 다음 중 어느 하나라도 해당하는 경우, 이를 요청 시 명시해야 합니다. 또는 시운전 시 현장에서 과도 오버슈트를 측정할 수 있습니다.
- 다축 컨버터 모듈 또는 조정형 공급 장치가 있는 PDS: 이 경우 접지 전위 대비 전기적 진동과 그로 인한 전압 부하가 모터의 절연 시스템을 손상시킬 수 있습니다.
- 과거에 보다 심각한 절연 손상이 발생했던 적용
- 이미 대책이 마련되어 있는 적용
600 V ~ 720 V의 DC 링크 전압에서 모터 상간의 오버슈트는 1370 V를 초과해서는 안 됩니다. 모터 상간의 피크-투-피크 대역은 2800 V를 초과해서는 안 됩니다.
조정형 공급 장치로 인한 라인 반사와 전기적 진동은 모터 상과 접지 전위 사이의 측정에서 중첩됩니다. 평가 시에는 피크-투-피크 대역만 고려해야 합니다. 피크-투-피크 대역은 2350 V를 초과해서는 안 됩니다.
1.6.6 영구자석 동기 모터의 단락 거동
비상시에는 U, V, W 상의 단락으로 토크 모터가 구동하는 축을 감속시킬 수 있습니다. 이러한 비상 제동은 단락 전류를 발생시킵니다. 전류 부하의 크기와 지속 시간은 PDS(power drive system)의 치수 설계 시 고려해야 합니다. 단락 전류가 냉각 연속 전류 Icw보다 높은 경우 Schaeffler Industrial Drives와 협의해야 합니다. 모터의 제동 거동은 속도와 관성 모멘트를 기준으로 계산됩니다.
1.7 냉각 및 냉각 회로
1.7.1 열 분포
모터 조립체는 모터 운전 중 발생하는 전력 손실을 기계로 전달합니다. 냉각, 대류, 전도, 복사를 위해 구현된 설계상의 조치를 활용하여 시스템 전체의 열 분포에 영향을 주고 제어할 수 있습니다. 모터 내부 열원에 대한 지식은 구조 설계에 결정적입니다.
저속, 즉 극 변환 주파수 < 100 Hz에서는 열이 모터 권선의 동손에 의해서만 발생합니다. 고속, 즉 극 변환 주파수 > 100 Hz에서는 회전자와 고정자의 철손, 그리고 회전자의 자석 손실도 추가로 발생합니다. 철손은 극 변환 주파수에 비례하여 선형으로 증가하지 않으며, 자속 약화 각도와 전류 밀도에 의존합니다.
극 변환 주파수 < 100 Hz에서의 운전 중 발생하는 열의 대부분은 고정자 외면의 액체 냉각 시스템을 통해 방출할 수 있습니다. 이른바 재킷 냉각 시스템은 재냉각기(recooler)의 냉각 회로에 연결됩니다. 냉각 재킷은 일반적으로 고객별 기계 설계의 구조 부품이지만, Schaeffler Industrial Drives가 별도로 제공할 수도 있습니다. 냉각 매체는 냉각 리브의 개구부, 즉 이른바 냉각 미앤더(cooling meander)를 통과하여 입구에서 출구까지 여러 레벨에 걸쳐 이동합니다. 입구와 출구는 두 연결부에 원하는 대로 할당할 수 있습니다. 유동 영역은 O-링으로 외부와 밀봉됩니다.
높은 출력 밀도, 고속(따라서 극 변환 주파수 > 100 Hz), 우수한 동적 응답 또는 높은 정밀도가 요구되는 기계의 경우, Schaeffler Industrial Drives는 주변 구조물이나 회전자에 대한 온도 제어 시스템(가열 또는 냉각)의 사용을 추가로 권장합니다. 일반적으로 베어링과 회전자를 냉각하기 위해 로터리 매니폴드가 사용됩니다. 주변 구조물의 온도 제어는 기계 구조의 열 변형과 베어링 예압에 미치는 영향을 최소화하여 정밀도를 높이는 데 도움이 됩니다.
고정자에 액체 냉각을 적용한 토크 모터의 연속 토크는 비냉각 운전 대비 최대 300 % 높습니다. 높은 연속 토크를 얻기 위해, 대부분의 적용에서 토크 모터는 액체 냉각을 적용하여 운전됩니다.
모터 냉각의 설계는 다음 요인의 영향을 받습니다:
- 설치 공간
- 정밀도 요구사항
- 주변 구조물의 열적 민감성
- 요구 속도
1.7.2 냉각 매체와 냉각에 미치는 영향
성능 데이터의 정보는 냉각 매체로 물을 기준으로 합니다. 다만 물에는 냉각 회로 내의 부식과 생물학적 퇴적을 방지하는 첨가제가 필요합니다. 물과 크게 다른 냉각 매체를 사용하면 방출 가능한 열량이 감소하므로, 연속 운전에서 이용 가능한 냉각 연속 토크 Tcw도 변하게 됩니다. 요청 시 Schaeffler Industrial Drives는 적용의 치수 설계와 달성 가능한 모터 데이터 결정을 지원할 수 있습니다.
고객별 냉각 매체로 치수를 설계하려면 다음 정보가 필요합니다:
- 종류 및 밀도
- 비열 용량
- 동점도(kinematic viscosity)
- 구성 물질이 포함된 기술 데이터 시트
물보다 점도가 현저히 높은 냉각 매체를 사용하는 경우, 사용 전에 냉각에 미치는 영향을 확인해야 합니다. Icw eff나 Tcw와 같은 모터 매개변수를 조정해야 할 수 있습니다. 사용하는 매체의 데이터를 사용해야 하며 예상 온도를 고려해야 합니다.
물
물은 가장 일반적으로 사용되는 냉각 매체입니다. 물은 비열 용량이 높고 저렴합니다. 부식과 생물학적 퇴적을 방지하는 첨가제가 들어 있는 물이 다른 모든 냉각 매체보다 바람직합니다. COOL CONCENTRATE 또는 COOL X와 같은 첨가제는 밀도나 점도와 같은 특성에 거의 영향을 주지 않습니다. 이러한 첨가제 중 하나가 들어 있는 물은 비열 용량이 4.1 kJ/kg·K인 매우 효율적인 냉각 매체입니다. 이 값은 물의 값과 거의 일치합니다.
표 8: 물의 물성
| 온도 | 밀도 1) | 비열 용량 | 점도(동적) | 동점도 |
|---|---|---|---|---|
| °C | kg/m³ | kJ/kg·K | Pa·s | mm²/s |
| +20 2) | 998,21 | 4,1840 | 0,0010014 | 1,00319572 |
| +25 | 997,05 | 4,1813 | 0,00088982 | 0,892452736 |
| +30 | 995,65 | 4,1798 | 0,00079705 | 0,800532316 |
1) DIN 1306에 따르며, 공기압 및 중력 가속도 1 g, 압력 pn = 1.01325 bar와 같은 부수 조건이 적용됩니다.
2) 기준 온도.
물–글리콜 혼합물
물과 글리콜의 혼합물은 물보다 어는점이 낮고 부식을 방지합니다. 이 혼합물은 한랭 환경이나 동결 방지가 필요한 적용에 자주 사용됩니다. 물–글리콜 혼합물은 순수한 물보다 점도가 높기 때문에 배관 시스템에서 압력 손실이 더 큽니다. 순환 펌프는 그에 상응하여 더 높은 압력을 공급해야 합니다.
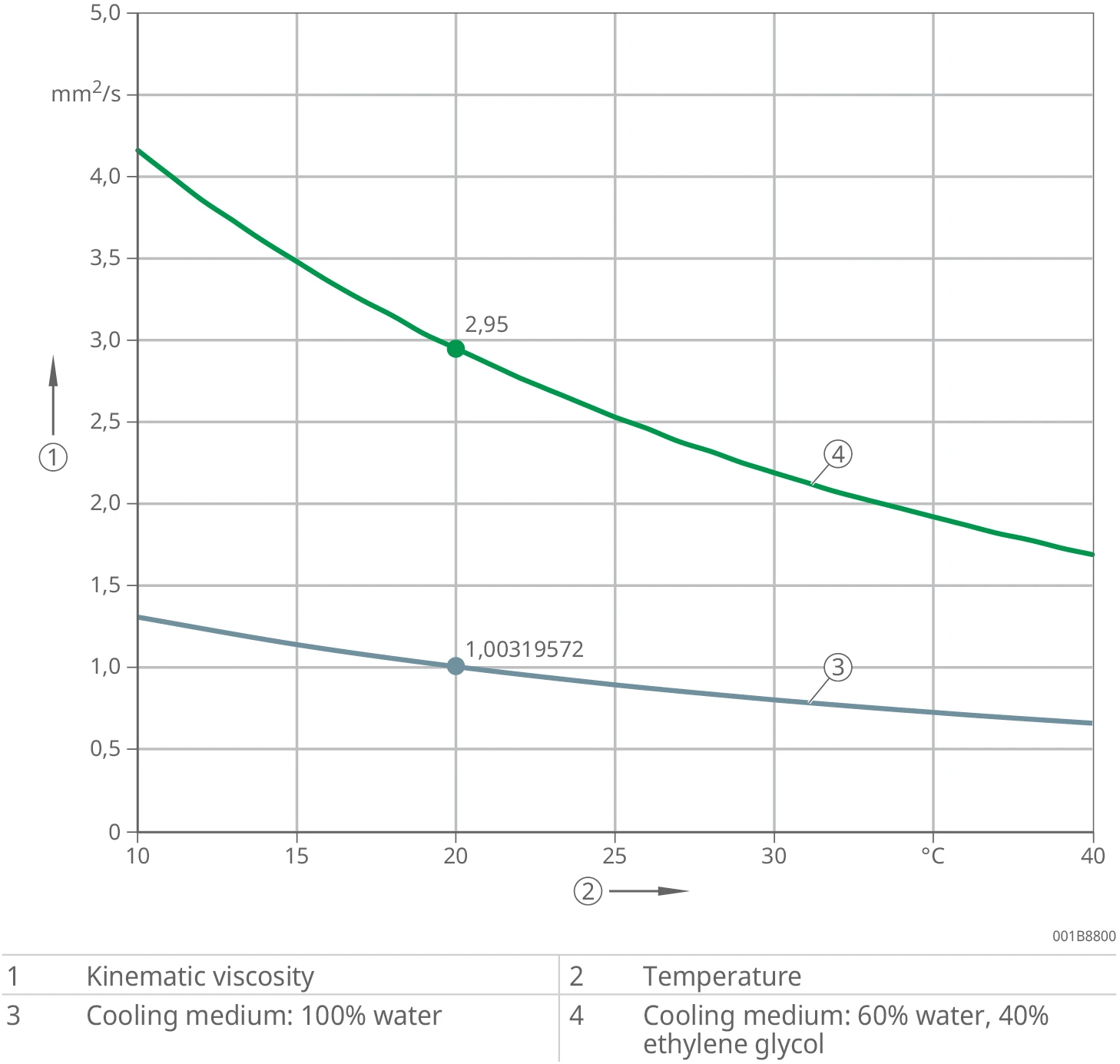
그림 10: 동점도의 온도 의존성. 세로축은 동점도(mm²/s), 가로축은 온도(°C)입니다. 두 곡선: ③=냉각 매체 물 100 %(20 °C에서 1.00319572), ④=냉각 매체 물 60 % + 에틸렌글리콜 40 %(20 °C에서 2.95). 기호 정의: ①=동점도, ②=온도.
예시
에틸렌글리콜 40 %(예: Antifrogen N)와 물 60 %의 혼합물은 어는점이 −25 °C이며 동점도가 물보다 2.95배 높습니다. 권장 유량은 현저히 더 높은 압력으로만 달성할 수 있습니다. 대략적인 추정에는 보정 계수를 사용할 수 있습니다.
표 9: 에틸렌글리콜에 대한 보정 계수
| 농도 | 어는점 | 압력차에 대한 보정 계수 |
|---|---|---|
| % | °C | – |
| 20 | −9 | 1,14 |
| 30 | −16 | 1,23 |
| 40 | −25 | 1,33 |
| 44 | −30 | 1,38 |
사용하는 냉각 매체의 정확한 값을 항상 준수해야 합니다.
오일
일부 산업 적용에서는 오일이 냉각 매체로 사용됩니다. 어떤 오일이 적합한지는 적용에 따라 결정됩니다. 오일을 사용하는 경우 냉각에 필요한 체적 유량을 항상 달성해야 합니다. 요청 시 Schaeffler Industrial Drives는 치수 설계를 지원할 수 있습니다. 모든 구성 요소의 화학적 적합성은 고객이 확인해야 합니다.
1.7.3 공칭 데이터가 공급 온도 및 냉각 매체에 미치는 영향
냉각 운전을 위해 명시된 연속 전류 Icw eff는 공칭 냉각수 공급 온도 ϑnf를 기준으로 합니다. 연속 전류 Icw eff는 성능 데이터에 명시되어 있습니다.
공급 온도 ϑf가 높아지면 냉각 능력이 감소하고, 따라서 연속 전류도 감소합니다. 감소된 연속 전류 Ic red는 다음의 2차 관계식으로 계산됩니다:
공식 2: 감소된 연속 전류
Ic red / Icw eff = √(ϑmax − ϑf) / (ϑmax − ϑnf)
| 기호 | 단위 | 설명 |
|---|---|---|
| Ic red | A | 감소된 연속 전류 |
| Icw eff | A | 실효 연속 전류, 냉각 |
| ϑmax | °C | 최대 허용 권선 온도 |
| ϑnf | °C | 공칭 공급 온도 |
| ϑf | °C | 현재 공급 온도 |
고객별 냉각 매체를 사용하면 방출 가능한 폐열량이 변하고, 따라서 연속 운전 중 이용 가능한 냉각 연속 토크도 변합니다. 요청 및 물성 명시 시, Schaeffler Industrial Drives의 엔지니어가 사용하는 냉각 매체의 영향을 판정할 수 있습니다.
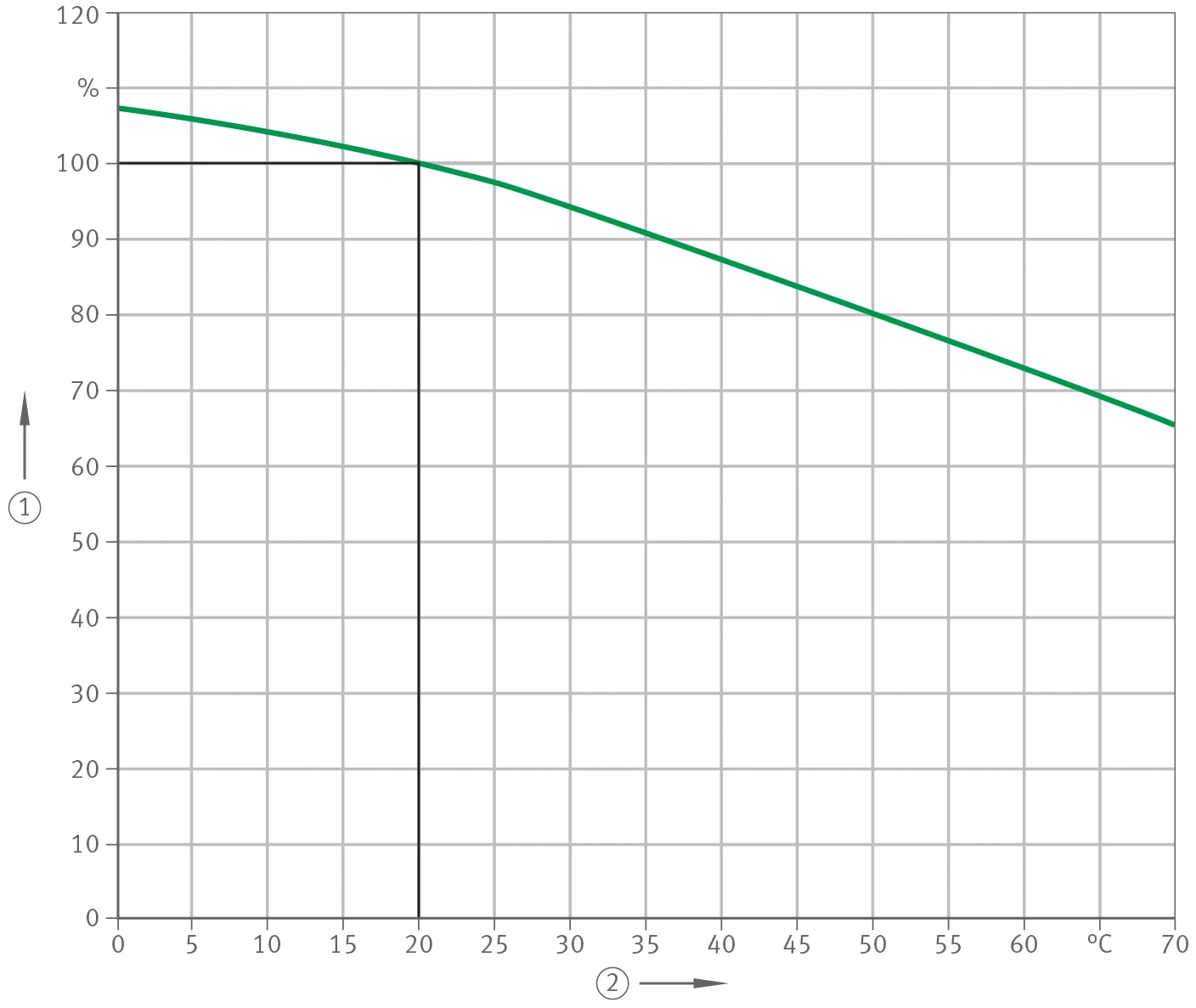
그림 11: 공급 온도 ϑf의 함수로 나타낸 상대 연속 전류 Ic red / Icw eff(ϑnf = +20 °C). 세로축은 상대 연속 전류(%), 가로축은 실제 공급 온도 ϑf(°C)입니다. 곡선은 +20 °C에서 100%이며 온도가 상승할수록 감소합니다. 기호 정의: ①=상대 연속 전류 Ic red / Icw eff(%), ②=실제 공급 온도 ϑf, Ic red=감소된 연속 전류, Icw eff=연속 전류(냉각), ϑnf=공칭 공급 온도.
1.8 모터의 배치
1.8.1 하나의 축에서 여러 모터의 병렬 운전
일부 적용에서는 2개 이상의 동기 모터로 하나의 축을 동시에 구동하는 것이 합리적입니다. 이러한 적용에는 5축 머시닝 센터의 피벗 시스템, 포크형 밀링 헤드, 호빙 머신용 기계 스핀들 등이 있습니다. 동일하게 제작된 동기 모터를 병렬로 연결하여 하나의 컨버터에서 함께 운전할 수 있습니다. 두 개의 토크 모터를 하나의 축에서 병렬로 운전하는 경우, 저속에서만 만족스러운 동기화 품질을 얻을 수 있습니다. 따라서 실무에서는 RIB 시리즈 토크 모터만 병렬 운전에 사용됩니다. RIB 시리즈 토크 모터는 RKIB 시리즈 토크 모터보다 속도가 느립니다.
1.8.2 모터의 배치
고정자의 평행 탠덤(tandem) 배치와 역평행, 즉 거울 대칭의 야누스(Janus) 배치를 구분합니다.
회전자 정렬
병렬 운전에서는 배치와 무관하게 회전자를 동일한 각도 위치로 정렬해야 합니다. 정렬에는 각 회전자의 표시를 사용할 수 있습니다.
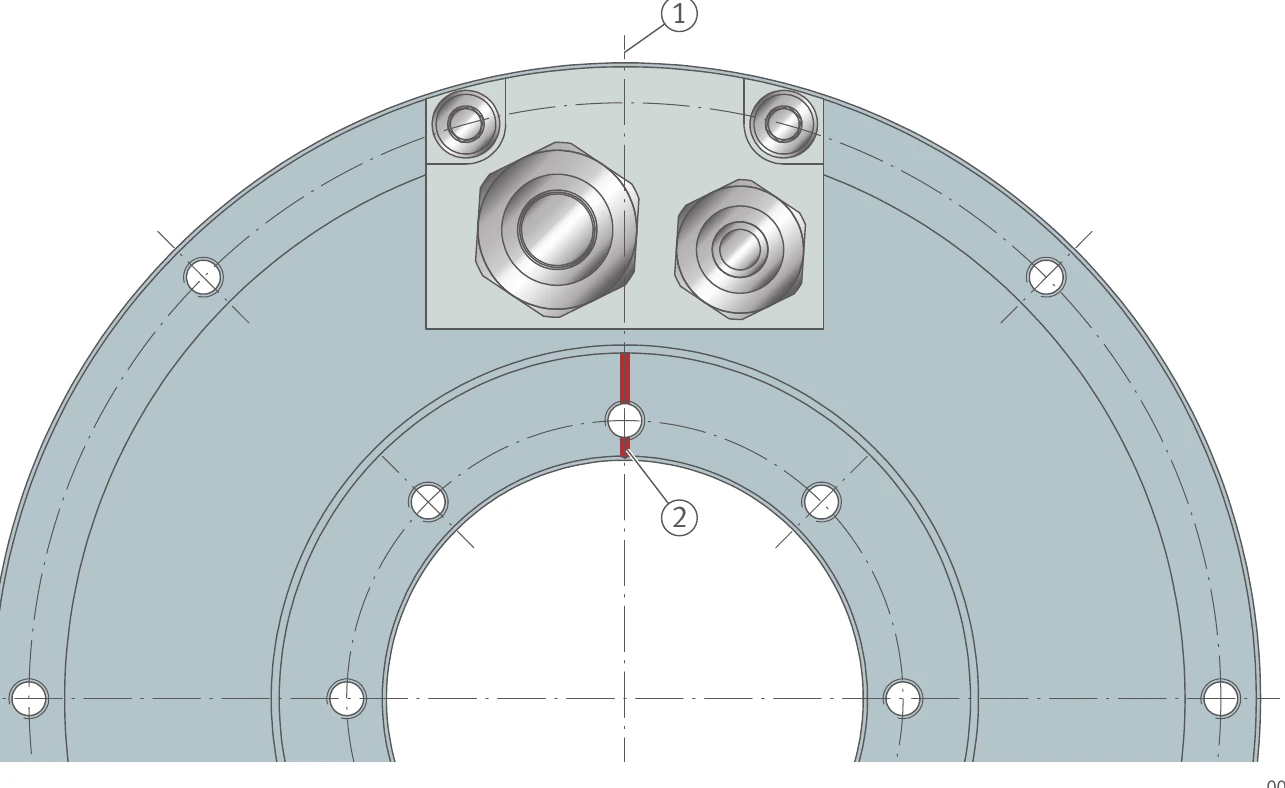
그림 12: 영점 축과 회전 표시의 정렬. ①=영점 축, ②=회전자 표시.
고정자 정렬
목표는 각 상의 코일을 동일한 각도 위치로 정렬하는 것입니다. 고정자는 영점 축을 사용하여 정렬할 수 있습니다. 케이블 인출부가 하나인 표준 RIB 모터의 경우, 영점 축은 케이블 클램프의 구멍 사이에 위치합니다. 고객별 또는 다중 케이블 인출부의 경우, 영점 축을 결정하기 위해 Schaeffler Industrial Drives와 협의해야 합니다.
병렬 운전을 계획하기 전에 Schaeffler Industrial Drives에 문의해야 합니다.
탠덤 배치
케이블 인출부가 동일한 길이 방향을 가리킵니다.
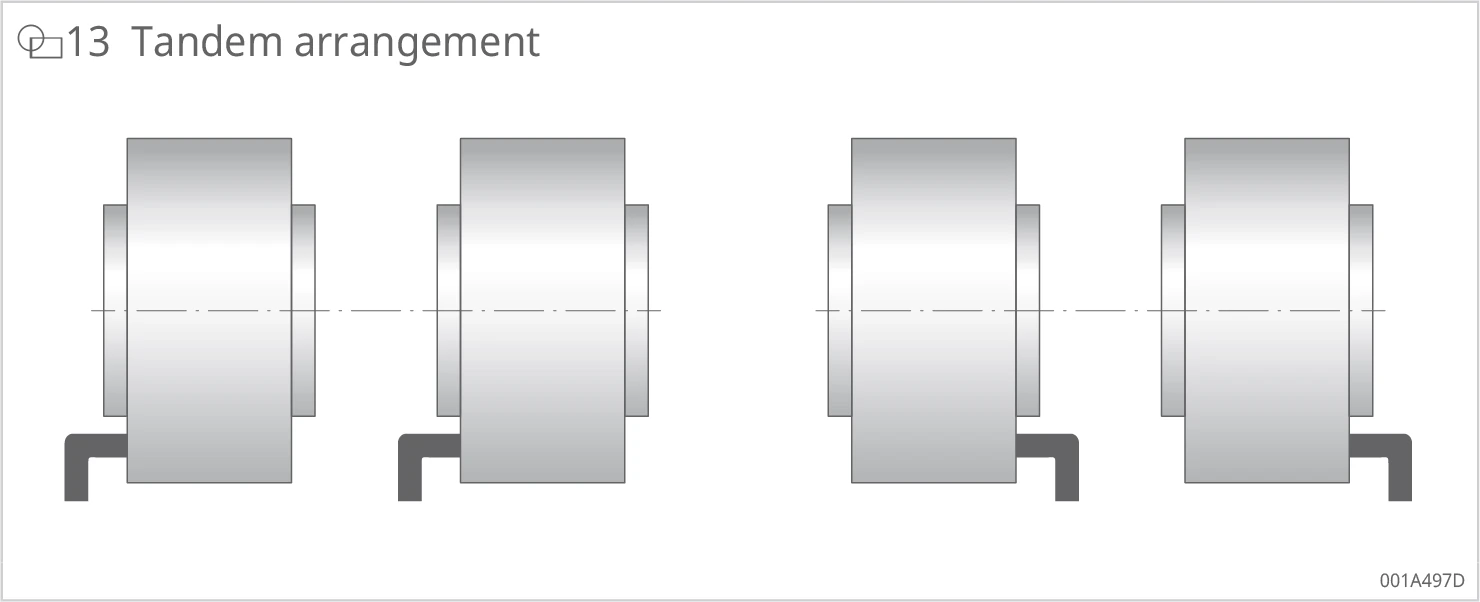
그림 13: 탠덤 배치. 케이블 인출부가 동일한 길이 방향을 가리키는 두 쌍의 모터 개략도.
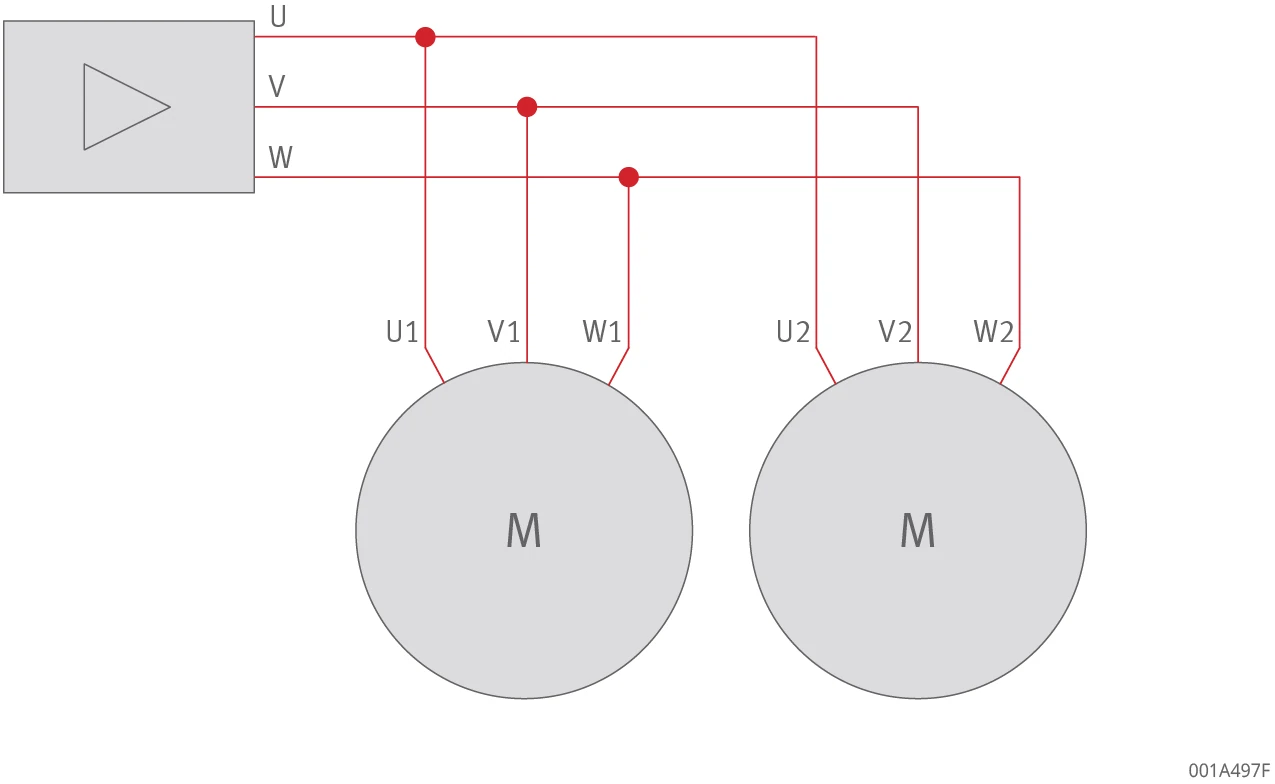
그림 14: 탠덤 배치 결선도. 컨버터 상 U, V, W가 두 모터 M의 U1/V1/W1 및 U2/V2/W2 단자에 각각 연결됩니다(같은 이름의 상끼리 연결).
고정자의 영점 축도 케이블 인출부와 정렬됩니다. 동축 케이블 인출부가 일치하는 경우, 볼트 원(bolt circle)을 동심으로 배치하고 같은 이름의 상 연결을 일렬로 맞춰야 합니다.
야누스 배치
케이블 인출부가 서로 반대되는 길이 방향을 가리킵니다.
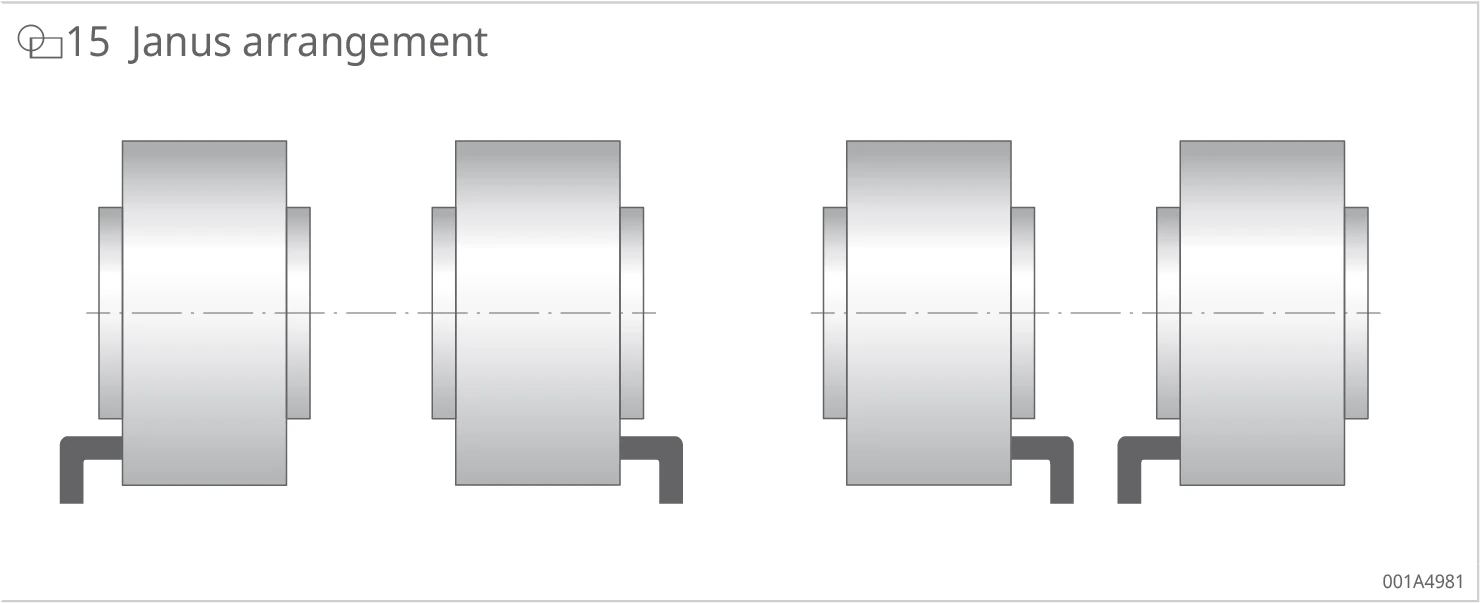
그림 15: 야누스 배치. 케이블 인출부가 서로 반대되는 길이 방향을 가리키는 두 쌍의 모터 개략도.
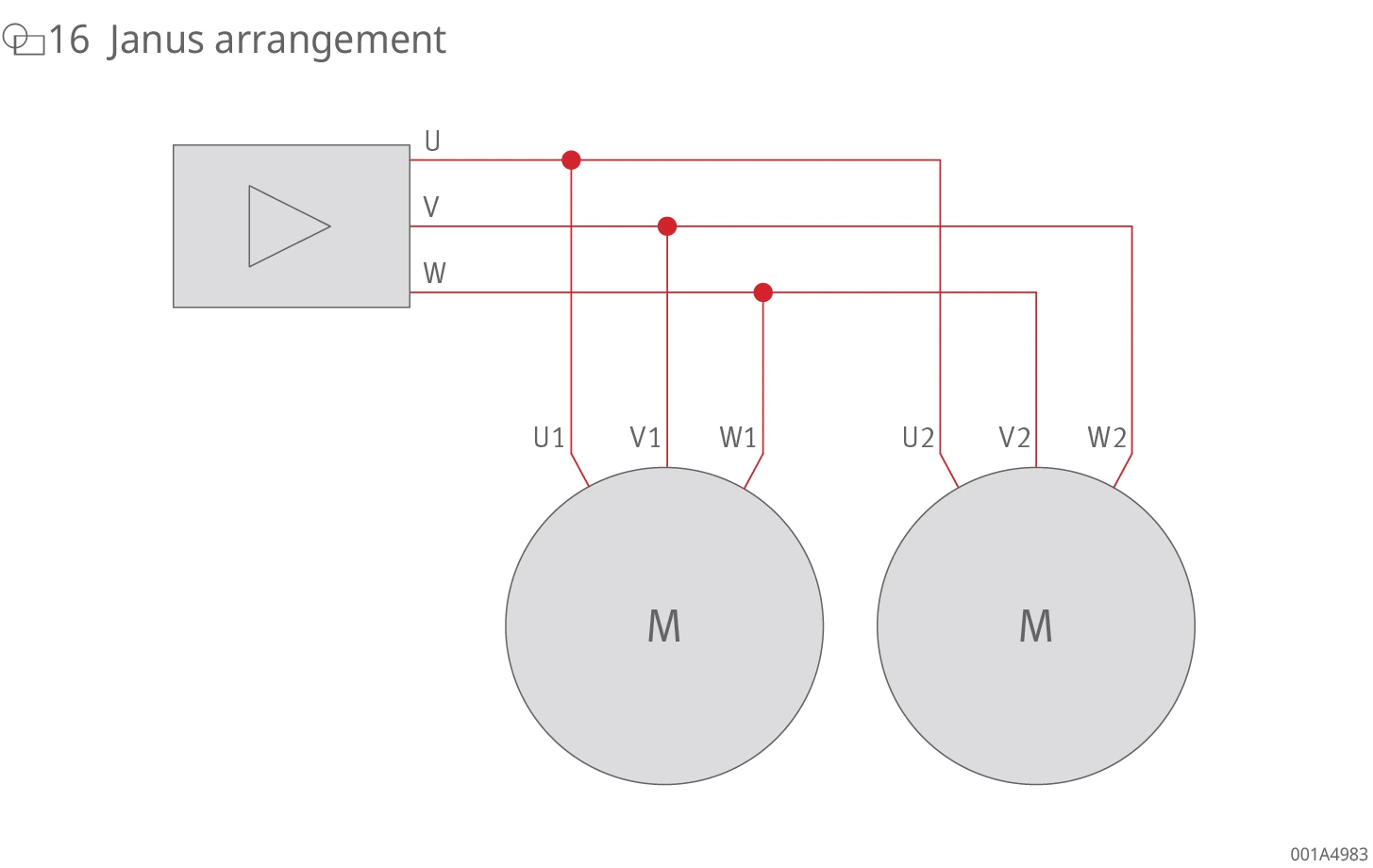
그림 16: 야누스 배치 결선도. 컨버터 상 U, V, W가 두 모터 M에 연결되며, 거울 대칭 운전을 구현하기 위해 한 모터의 V상과 W상이 서로 교체됩니다.
거울 대칭 야누스 배치에서도 영점 축이 일치해야 합니다. 영점 축의 위치에 따라 볼트 원을 오프셋해야 할 수도 있습니다. 거울 대칭으로 배치된 모터는 반대 회전 방향으로 작동해야 합니다. 이를 위해 두 모터 중 하나에서 V상과 W상을 서로 교체합니다. 그 결과 U1과 U2, V1과 W2, W1과 V2가 함께 컨버터에 연결됩니다.
1.9 하나의 축에서 여러 모터의 병렬 운전
1.9.1 케이블 인출부의 변위
모든 배치에서 고정자, 따라서 케이블 인출부는 일정한 크기의 단계로 서로 회전시킬 수 있습니다. 특히 내부 케이블 인출부를 가진 야누스 배치에서는 고정자를 회전시켜 전체 축을 더 짧게 설계할 수 있습니다. 단계 크기는 극 쌍(pole pair)에 해당하며 정수 배로 곱해야 합니다.
회전 각도는 다음과 같이 계산됩니다:
공식 3: 비틀림 각도
Torsion angle = ( 360° / Number of pole pairs ) · x
| 기호 | 단위 | 설명 |
|---|---|---|
| x | – | 임의의 정수 배수 |
일부 시리즈에서는 볼트 원에서도 유리한 회전 각도를 달성할 수 있습니다(예: RIB11-3P-230xH):
공식 4: 볼트 원에서의 비틀림 각도
Torsion angle = ( 360° / 22 ) · 11 = 180°
1.9.2 위상 일치 설정
모든 경우에 병렬 모터가 서로 위상이 일치하는지 확인해야 합니다. 위상이 일치하지 않으면 유도된 단락 전류로 인해 속도에 비례하여 토크 상수와 효율이 감소합니다.
위상 정렬은 연결된 회전자를 동시에 회전시키면서 2채널 오실로스코프를 사용하여 모터의 역기전력(back EMF)을 측정함으로써 이루어집니다. 상호 연결된 모터의 우수한 정적 기능을 달성하려면, 두 곡선 사이의 위상 오프셋이 ±5°를 초과해서는 안 됩니다. 회전자 또는 고정자를 기계적으로 조정하면 모터 간에 존재하는 전기적 위상 오프셋을 상쇄할 수 있습니다.
다음이 적용됩니다:
공식 5: 기계각 정리
Mechanical angle set = Phase offset / Number of pole pairs
올바르게 설치되면, EN 20273의 중간 공차 등급에 해당하는 볼트 원 볼트 결합부의 유격으로 미세 조정에 충분합니다. 3개 이상의 모터를 병렬로 연결하는 경우, 하나를 마스터로 정의하여 나머지 모든 모터를 정렬하기 위한 기준점으로 삼습니다.
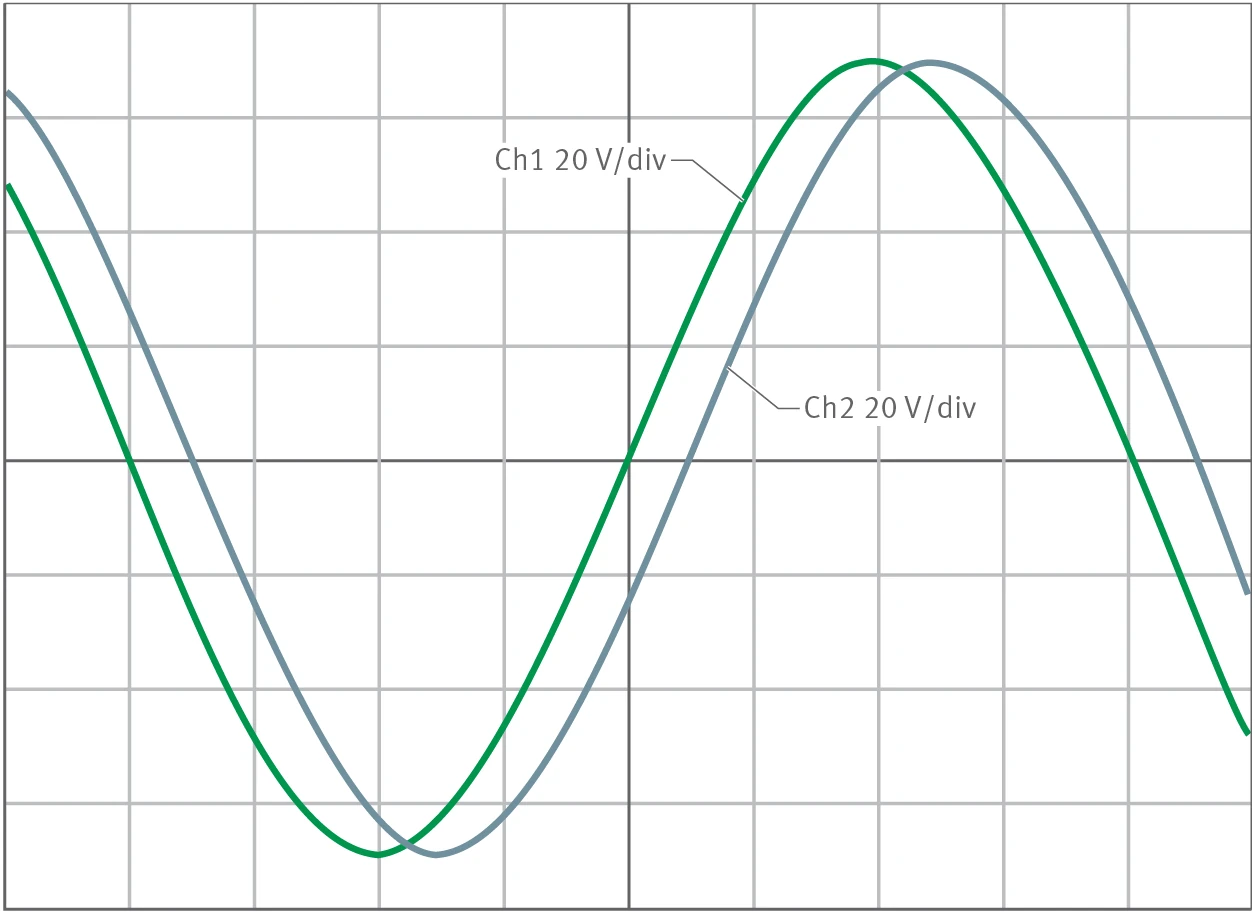
그림 17: 역기전력 사이의 위상 오프셋 22.5°. 2채널 오실로스코프가 두 역기전력 곡선 사이의 위상 오프셋을 나타냅니다(Ch1 20 V/div, Ch2 20 V/div).
1.9.3 온도 센서의 평가
모터 간 정렬이 부정확하거나 부정밀하면 모터의 열적 과부하를 야기할 수 있습니다. 내장 PTC 센서는 모터 보호 역할을 합니다. 배치 내 각 모터의 PTC 센서는 직렬로 연결되어 서미스터 모터 보호 릴레이에 의해 평가됩니다.
모터 보호 시스템의 조기 트립을 방지하기 위해, Schaeffler Industrial Drives는 3개 이상의 PTC 모니터링 회로가 있는 경우 여러 개 또는 다채널 서미스터 모터 보호 릴레이를 사용할 것을 권장합니다.
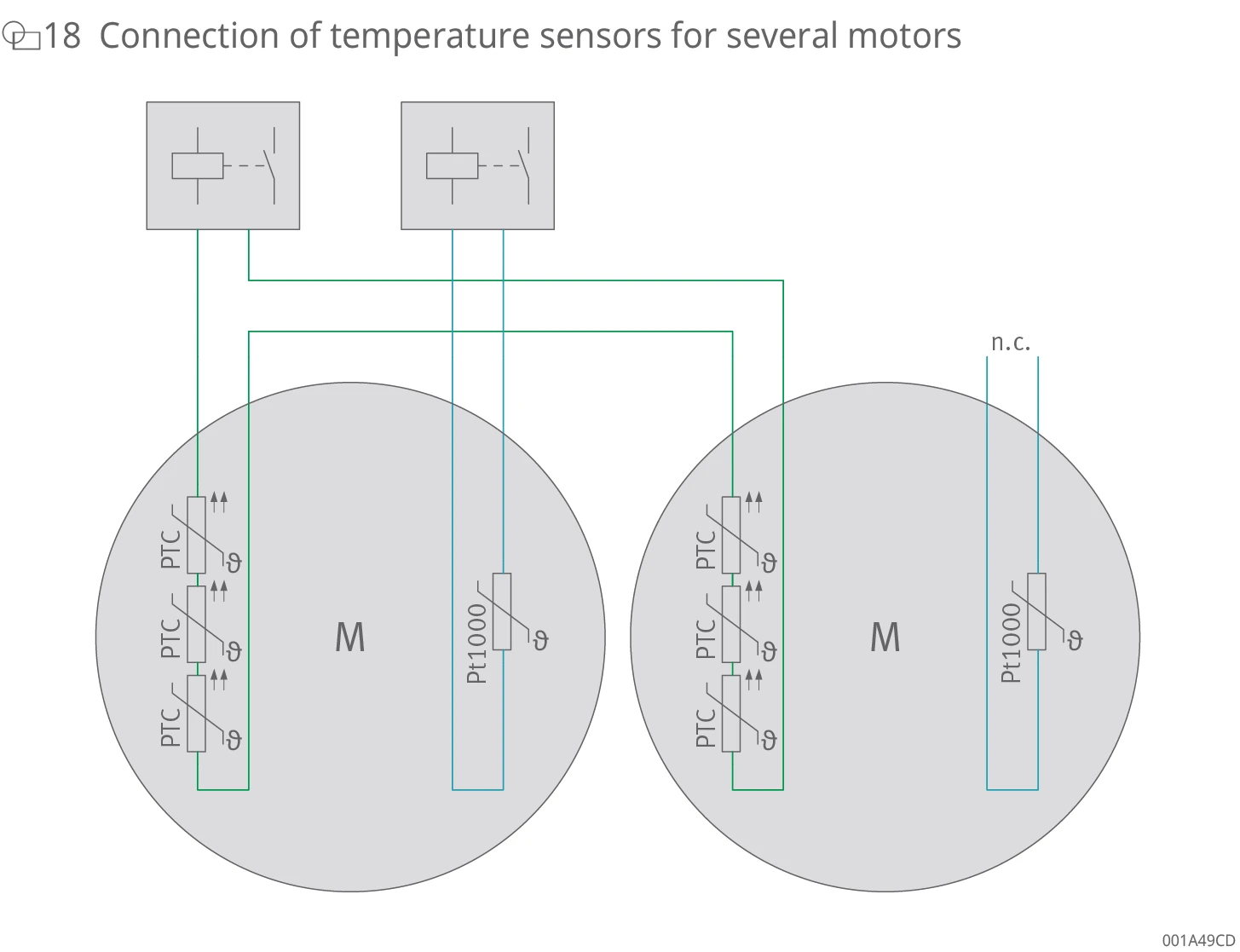
그림 18: 여러 모터의 온도 센서 결선. 두 모터 M의 PTC(직렬)가 모터 보호 릴레이에 연결되며, 각 모터에는 Pt1000 센서도 있습니다(하나는 n.c., 미연결로 표시).
1.9.4 결과 모터 데이터
구조적으로 동일한 개별 모터를 병렬로 연결하면, 현재의 대체 모터에 대한 컨버터의 새로운 전기 데이터가 산출됩니다. 이러한 전기 데이터는 개별 모터의 다음 데이터로부터 쉽게 결정할 수 있습니다:
- 극 쌍 수, 토크 상수, 전압 상수, 시정수 및 속도는 변하지 않습니다.
- 전류, 토크, 감쇠 상수는 개별 모터의 수만큼 곱해집니다.
- 저항과 인덕턴스는 개별 모터의 수로 나누어집니다.
1.10 회전 적용을 위한 다이렉트 드라이브의 선정
1.10.1 사이클 적용
사이클 운전은 사이에 운동 정지가 있는 연속적인 위치 결정 운동으로 구성됩니다. 단순한 위치 결정 동작은 양(+)의 가속 운동과 그에 이어지는 제동의 형태를 취합니다. 음(−)의 가속 값이 동일하면 가속 시간과 제동 시간이 같습니다. 최대 각속도 ωmax는 가속 단계가 끝나는 시점에 도달합니다.
하나의 사이클은 ω-t 선도로 표현됩니다. 사이클 운전의 ω-t 선도는 정지 시간이 있는 정/역 회전을 나타냅니다.
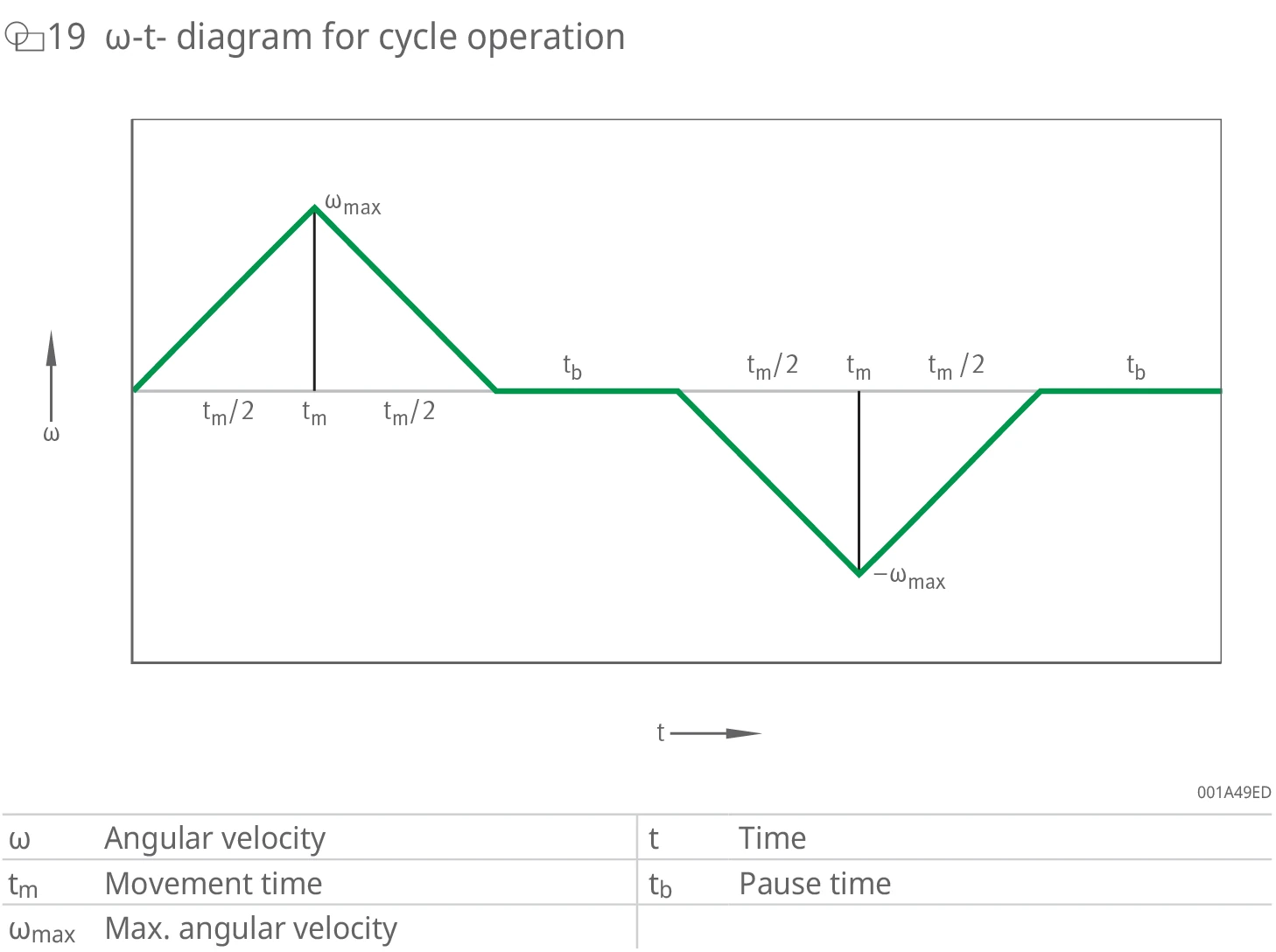
그림 19: 사이클 운전의 ω-t 선도. 세로축은 각속도 ω, 가로축은 시간 t입니다. 정지 시간이 있는 정/역 회전을 나타내며, 운동 시간 tm, 정지 시간 tb, 최대 각속도 ωmax를 표시합니다. 기호 정의: ω=각속도, tm=운동 시간, ωmax=최대 각속도, t=시간, tb=정지 시간.
정지 시간이 있는 정/역 회전으로부터 사이클 운전의 α-t 선도와 운동에 필요한 토크 곡선이 얻어집니다:
공식 6: 토크
T = J · α
| 기호 | 단위 | 설명 |
|---|---|---|
| T | Nm | 토크 |
| J | kg·m² | 질량 관성 모멘트 |
| α | rad/s² | 각가속도 |
모터 선정은 요구되는 사이클의 토크 프로파일에 따라 다음 세 가지 기준을 근거로 이루어집니다:
- 사이클 내 최대 토크 ≤ 성능 데이터의 Tp
- 사이클 내 실효 토크 ≤ 성능 데이터의 Tc(비냉각 모터) 또는 Tcw(수냉각)
- 사이클 내 최대 속도 ≤ 성능 데이터의 nlp
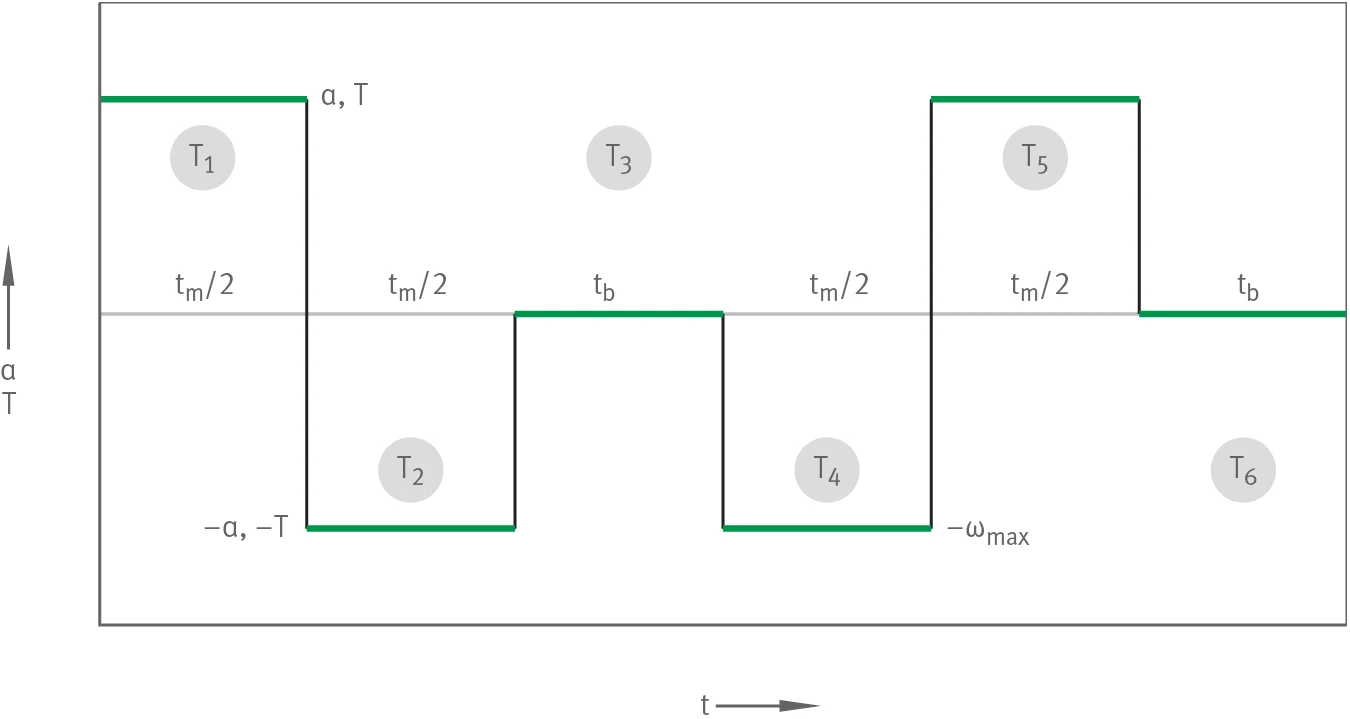
그림 20: 사이클 운전의 α-t 선도. 세로축은 각가속도 α 및 토크 T, 가로축은 시간 t입니다. 6개의 토크 단계 T1–T6을 나타냅니다. 기호 정의: α=각가속도, tm=운동 시간, ωmax=최대 각속도, t=시간, tb=정지 시간, T=토크, T1=토크 단계 1(T1=T), T2=토크 단계 2(T2=−T), T3=토크 단계 3(T3=0), T4=토크 단계 4(T4=−T), T5=토크 단계 5(T5=T), T6=토크 단계 6(T6=0).
실효 토크는 사이클 내 6개 토크 단계로 구성된 토크 프로파일의 제곱 평균 제곱근(RMS)과 같습니다.
공식 7: 실효 토크
Teff = √(T12·t1 + T22·t2 + … + T62·t6) / (t1 + t2 + … + t6)
| 기호 | 단위 | 설명 |
|---|---|---|
| Teff | Nm | 실효 토크 |
| T1 | Nm | 토크 단계 1, T1 = T |
| t1 | s | 운동 시간 1, t1 = tm/2 |
| T2 | Nm | 토크 단계 2, T2 = −T |
| t2 | s | 운동 시간 2, t2 = tm/2 |
| T6 | Nm | 토크 단계 6, T6 = 0 |
| t6 | s | 운동 시간 6, t6 = tb |
토크에 대해서는 안전 계수 1.4를 권장합니다. 이 안전 계수는 토크–전류 특성 곡선의 비선형 영역에서의 모터 운전과 같은 조건을 고려하며, 이 영역에서는 Teff의 계산식이 근사적으로만 적용됩니다.
실효 토크는 다음 토크들로 계산할 수 있습니다:
- T1 = T
- T2 = −T
- T3 = 0
- T4 = −T
- T5 = T
- T6 = 0
실효 토크는 다음 시간들로 계산할 수 있습니다:
- t1 = tm/2
- t2 = tm/2
- t3 = tb
- t4 = tm/2
- t5 = tm/2
- t6 = tb
공식 8: 실효 토크
Teff = T · √tm / (tm + tb)
공식 9: 실효 토크
Teff = J · α · √tm / (tm + tb)
사이클 내에서 크기가 동일한 토크만 작용하는 경우, 이 식이 실효 토크에 적용됩니다(공식 9). 질량 관성 모멘트와 각가속도는 일정합니다. 운동 시간을 운동 시간과 정지 시간의 합으로 나눈 값이 근호 아래에 들어갑니다. 분모에는 사이클 시간이 포함됩니다.
위치 결정 운동의 각가속도, 최대 각속도, 최대 회전 속도는 다음과 같이 계산할 수 있습니다:
공식 10: 각가속도
α = (4 · φ) / tm2
| 기호 | 단위 | 설명 |
|---|---|---|
| α | rad/s² | 각가속도 |
| φ | ° | 운동 각도 |
| tm | s | 운동 시간 |
공식 11: 최대 각속도
ωmax = (2 · φ) / tm
| 기호 | 단위 | 설명 |
|---|---|---|
| tm | s | 운동 시간 |
공식 12: 최대 속도
nmax = (30 / π) · ωmax
여기에 제시된 계산 방법은 이상화되고 단순화된 것입니다. 예를 들어 각가속도의 증가율은 무한히 큽니다. 실제로 각가속도는 모터 인덕턴스나 기타 구성 요소에 의해 제한됩니다. 설계 시 이러한 영향을 고려하기 위해 안전 계수를, 또는 고도로 동적인 운동의 경우 위치 결정 동작당 15 ms ~ 20 ms의 추가 시간을 사용합니다.
1.10.2 사이클 적용 예시
표 10: 지정값
| 지정값 | 단위 | 값 |
|---|---|---|
| 운동 각도 φ | ° | 180 |
| 운동 시간 tm | s | 0,5 |
| 사이클 시간 tm + tb | s | 1,35 |
| 질량 관성 모멘트 J | kg·m² | 2,5 |
| 마찰 토크 TF | Nm | 8 |
| 안전 계수 SF | – | 1,4 |
계산
운동 각도 환산:
공식 13: 운동 각도 환산
φ = (π / 180) · 180 rad = 3,142 rad
최대 각속도:
공식 14: 최대 각속도
ωmax = (2 · φ) / tm = (2 · 3,142) / 0,5 rad/s = 12,57 rad/s
최대 속도:
공식 15: 최대 속도
nmax = (30 / π) · ωmax = (30 / π) · 12,57 1/s = 120 min⁻¹
각가속도:
공식 16: 각가속도
α = (4 · φ) / tm2 = (4 · 3,142) / 0,52 rad/s² = 50,27 rad/s²
베어링 마찰 토크 TF를 고려하면, 최대 토크는 다음과 같이 산출됩니다:
공식 17: 최대 토크
Tmax = (J · α) + TF = (2,5 · 50,27) + 8 = 133,68 Nm
베어링 마찰 토크 TF를 고려한 실효 토크:
공식 18: 베어링 마찰 토크를 고려한 실효 토크
Teff = ( J · α · √tm / (tm + tb) ) + TF = ( 2,5 · 50,27 · √0,5 / 1,35 ) + 8 = 84,48 Nm
안전 계수 SF를 고려하여, 모터는 다음 요구사항에 따라 선정됩니다:
Tsafe max = Tmax × 1,4 ≤ TP
Tsafe eff = Teff × 1,4 ≤ Tcw
nmax ≤ nlp
속도에 대한 안전 계수는 안정화되지 않은 DC 링크 전압의 주파수 인버터를 사용할 때만 필요합니다. 본 사례에서는 안정화된 DC 링크 전압 UDCL = 600 V의 주파수 인버터를 사용합니다. 따라서 속도에 대한 안전 계수 없이 작업하는 것이 허용되며 nmax ≤ nlp가 적용됩니다. nmax > nlp인 경우, nmax에서의 운전점 Tsafe max는 해당 DC 링크 전압에서의 토크–속도 특성 곡선을 사용하여 검증할 수 있습니다.
계산 결과 다음과 같은 모터 요구사항이 도출됩니다:
안전 계수 미적용:
- Tp = 133,68 Nm
- Tcw = 84,48 Nm
안전 계수 적용:
- Tsafe max = 187,15 Nm
- Tsafe eff = 118,27 Nm
모터 RIB17-3P-168x50-Z0.7 (Tp = 233 Nm, Tcw = 123 Nm, nlp = 150 min⁻¹)은 본 예시 계산의 요구사항을 완전히 충족합니다.
1.10.3 NC 로터리 테이블 적용
수냉식 로터리 테이블 적용의 경우, 속도 n, 관성 모멘트 J, 운동 중 가공 토크 TW, 구속 토크 Tsw와 함께 S1 운전 시 각가속도 α 및 S6 운전 시 αmax가 일반적으로 알려져 있습니다. 토크의 유효 시간은 자주 변하지만, 최적의 모터를 선정하고 최대 허용 권선 온도 초과를 방지하기 위해서는 실효 토크를 연속 토크로, 최대 토크를 가능한 한 정확하게 결정하는 것이 필요합니다.
모터 운전 중 발생하는 모든 부하 토크가 토크 계산에 포함됩니다.
1.10.4 NC 로터리 테이블 적용 예시
표 11: 지정값
| 지정값 | 단위 | 값 |
|---|---|---|
| 속도 n | min⁻¹ | 60 |
| 질량 관성 모멘트 J | kg·m² | 4 |
| 가공 토크 TW | Nm | 300 |
| 마찰 토크 TF | Nm | 50 |
| 중량력(추가 토크) TZ | Nm | 0 |
| S1 모드 시 각가속도 αS1 | °/s² | 9000 |
| S6 운전 3 s 시 최대 각가속도 αmax | °/s² | 20000 |
| 안전 계수 SF | – | 1,4 |
계산
각가속도를 rad/s²로 환산:
공식 19: 각가속도
αS1 = (π / 180) · αS1 [°/s²] = (π / 180) · 9000 = 157 rad/s²
공식 20: 최대 각가속도
αmax = (π / 180) · αmax [°/s²] = (π / 180) · 20000 = 349 rad/s²
모터 선정은 냉각 구속 토크 Tsw와 S1 운전 시 운동 토크 Tcw, S6 운전 시 운동 토크 Tp를 근거로 합니다. 안전 계수 SF 1.4는 위치를 안정적으로 유지하고 제어 시스템이 편차에 안전하게 응답하도록 보장합니다.
공식 21: 냉각 구속 토크, 수냉각
Tsw = ( TW + TF + TZ ) · 1,4 = 490 N
| 기호 | 단위 | 설명 |
|---|---|---|
| Tsw | Nm | 구속 토크, 냉각 |
| TW | Nm | 가공 토크 |
| TF | Nm | 베어링 마찰 토크 |
| TZ | Nm | 중량력(추가 토크) |
공식 22: 냉각 연속 토크, 수냉각
Tcw = ( J · αS1 + TW + TF + TZ ) · 1,4 = 1369 N
| 기호 | 단위 | 설명 |
|---|---|---|
| Tcw | Nm | 연속 토크, 냉각 |
| J | kg·m² | 질량 관성 모멘트 |
| αS1 | rad/s² | S1 운전 시 각가속도 |
| TW | Nm | 가공 토크 |
| TF | Nm | 베어링 마찰 토크 |
| TZ | Nm | 중량력(추가 토크) |
공식 23: 피크 토크
Tp = ( J · αmax + TW + TF + TZ ) · 1,4 = 2444 N
| 기호 | 단위 | 설명 |
|---|---|---|
| Tp | Nm | 피크 토크 |
| J | kg·m² | 질량 관성 모멘트 |
| αmax | rad/s² | 최대 각가속도 |
| TW | Nm | 가공 토크 |
| TF | Nm | 베어링 마찰 토크 |
| TZ | Nm | 중량력(추가 토크) |
계산 결과 다음과 같은 요구사항이 도출됩니다:
- Tp = 2444 Nm
- Tcw = 1369 Nm
모터 RIB13-3P-690×50-Z4.2 (Tp = 3627 Nm, Tcw = 2166 Nm, nlp = 61 min⁻¹)는 본 예시 계산의 요구사항을 완전히 충족합니다.
이 예시에서는 속도 제어가 사용됩니다. NC 로터리 테이블은 먼저 정해진 속도로 기동해야 합니다. 그런 다음 NC 로터리 테이블은 이 속도로 공작물을 가공합니다.
위치 제어에서 이른바 리버서(reverser)의 경우처럼 위치 결정 동작이 추가로 요구되는 경우, TP에서의 필요 속도를 안전 계수 10 % ~ 20 %만큼 높여야 합니다. 그러면 모터의 한계 속도 nlp가 추가값이 포함된 계산 속도보다 커야 합니다.
참고: 본 장에 기재된 값, 공식, 예시는 모두 Schaeffler RE 1 카탈로그의 기술 원리 장에서 발췌한 것입니다. 구속력 있는 데이터는 견적 및 납품 도면에 제공됩니다. 사전 통보 없이 변경될 수 있습니다.