1.1 Chú giải các ký hiệu dùng trong công thức
Lưu ý
Bảng dưới đây liệt kê tất cả các ký hiệu, đơn vị và mô tả được sử dụng trong các công thức và biểu đồ của chương này, tổng cộng 58 mục.
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| I | A | Dòng điện động cơ |
| Ic eff | A | Dòng điện liên tục hiệu dụng, không làm mát |
| Ic red | A | Dòng điện liên tục đã giảm |
| Icw eff | A | Dòng điện liên tục hiệu dụng, có làm mát |
| Icw2 eff | A | Dòng điện liên tục hiệu dụng cho tốc độ cao hơn trong vận hành liên tục |
| Ip eff | A | Dòng điện đỉnh hiệu dụng |
| Ipl eff | A | Dòng điện đỉnh hiệu dụng, vùng tuyến tính |
| Iu eff | A | Dòng điện giới hạn hiệu dụng |
| J | kg·m² | Mô-men quán tính khối lượng |
| km | Nm/√W | Hằng số động cơ cho động cơ mô-men xoắn |
| kT | Nm/A | Hằng số mô-men xoắn |
| n | min⁻¹ | Tốc độ |
| nlc | min⁻¹ | Tốc độ giới hạn tại Ic eff và UDCL |
| nlp | min⁻¹ | Tốc độ giới hạn tại Ip eff và UDCL |
| nlw | min⁻¹ | Tốc độ điểm gãy |
| nlw2 | min⁻¹ | Tốc độ vận hành FS tại Icw2 eff và UDCL |
| nlw3 | min⁻¹ | Tốc độ giới hạn tại Icw2 eff và UDCL trong vận hành liên tục |
| nlwS1 | min⁻¹ | Tốc độ định mức S1, có làm mát |
| nmax | min⁻¹ | Tốc độ tối đa |
| Pl | W | Tổn thất công suất |
| Pmax S1 | N | Công suất định mức tối đa |
| R | Ω | Điện trở thuần |
| t | s | Thời gian |
| T | Nm | Mô-men xoắn |
| tb | s | Thời gian tạm dừng |
| Tc | Nm | Mô-men xoắn liên tục, không làm mát |
| Tcw | Nm | Mô-men xoắn liên tục, có làm mát |
| Tcw2 | Nm | Mô-men xoắn tại Icw2 eff và nlw2 |
| Tcw3 | Nm | Mô-men xoắn tại Icw2 eff và nlw3 |
| Teff | Nm | Mô-men xoắn hiệu dụng |
| TF | Nm | Mô-men ma sát của ổ đỡ |
| tm | s | Thời gian chuyển động |
| Tmax | Nm | Mô-men xoắn tối đa |
| Tp | Nm | Mô-men xoắn đỉnh |
| Tpl | Nm | Mô-men xoắn đỉnh, vùng tuyến tính |
| Tsafe eff | Nm | Mô-men xoắn hiệu dụng, gồm hệ số an toàn |
| Tsafe max | Nm | Mô-men xoắn tối đa, gồm hệ số an toàn |
| Tsw | Nm | Mô-men xoắn giữ đứng yên, có làm mát |
| Tu | Nm | Mô-men xoắn giới hạn |
| TW | Nm | Mô-men xoắn gia công |
| TZ | Nm | Lực trọng lượng (mô-men xoắn bổ sung) |
| UDCL | V | Điện áp mạch một chiều |
| α | rad/s² | Gia tốc góc |
| αmax | rad/s² | Gia tốc góc tối đa |
| αS1 | rad/s² | Gia tốc góc trong vận hành S1 |
| ϑ | °C | Nhiệt độ |
| ϑf | °C | Nhiệt độ cấp hiện tại |
| ϑmax | °C | Nhiệt độ cuộn dây tối đa cho phép |
| ϑn | °C | Nhiệt độ tác động danh định |
| ϑnf | °C | Nhiệt độ cấp danh định |
| φ | ° | Góc chuyển động |
| ω | rad/s | Vận tốc góc |
| ωmax | rad/s | Vận tốc góc tối đa |
1.2 Ưu điểm của động cơ mô-men xoắn
1.2.1 Khả năng hoạt động
Không cần chuyển đổi biên dạng chuyển động
Không có độ đàn hồi, độ rơ, ma sát hay trễ trong chuỗi truyền động do các phần tử truyền lực hoặc khớp nối gây ra.
Động cơ nhiều cực
Mô-men xoắn cực lớn được tạo ra nhờ thiết kế nhiều cực. Mô-men xoắn có thể được sử dụng từ tốc độ > 0 đến tốc độ định mức.
Rôto dạng vòng mỏng
Thiết kế dạng vòng mỏng với đường kính trong tự do lớn làm giảm quán tính động cơ và cho tốc độ gia tốc cao.
Đo vị trí trực tiếp
Các thao tác định vị động học có độ chính xác cao là khả thi nhờ phép đo vị trí trực tiếp và kết cấu cơ khí cứng vững.
Khả năng tương thích bộ điều khiển
Động cơ mô-men xoắn của Schaeffler Industrial Drives có thể vận hành với tất cả các bộ truyền động servo phổ biến trên thị trường.
1.2.2 Chi phí vận hành
Không có thêm bộ phận chuyển động
Việc không có thêm bộ phận chuyển động giúp dễ dàng lắp ráp, hiệu chỉnh và bảo trì phòng ngừa cho cụm truyền động.
Mài mòn tối thiểu trong chuỗi truyền động
Chuỗi truyền động cực kỳ bền ngay cả dưới tải xen kẽ rất cao. Mức mài mòn thấp làm giảm thời gian dừng máy.
Tính sẵn sàng cao
Bên cạnh tuổi thọ tăng và mài mòn giảm, thiết kế bền vững của động cơ mô-men xoắn còn làm tăng tính sẵn sàng của toàn bộ máy.
Hiệu suất năng lượng
Nhiệt được giảm xuống mức tối thiểu nhằm tiết kiệm năng lượng cho bộ truyền động servo và bộ làm mát.
1.2.3 Thiết kế
Trục rỗng
Trục rỗng với đường kính lớn cho phép tích hợp hoặc dẫn qua các cụm khác, chẳng hạn như trục, bộ phân phối quay và đường dẫn môi chất. Mặt phẳng ổ đỡ, vùng tạo lực và vùng làm việc hiệu dụng đều có thể nằm gần nhau.
Lắp đặt stato
Vòng dùng cho stato có thể dễ dàng tích hợp vào kết cấu máy nhờ yêu cầu không gian nhỏ.
Chiều cao tiết diện thấp
Một kết cấu rất gọn và ngắn theo phương trục với mô-men xoắn cao được thực hiện nhờ đường kính trong tự do lớn.
Ít linh kiện
Thiết kế được tối ưu hóa kỹ thuật cao giúp dễ dàng tích hợp các thành phần động cơ vào cụm máy. Số lượng nhỏ và thiết kế bền vững của các bộ phận làm giảm tỷ lệ hỏng hóc và tăng thời gian trung bình giữa các lần hỏng.
1.3 Đặc điểm của động cơ mô-men xoắn
Một động cơ mô-men xoắn được cấu thành từ một stato và một rôto. Stato chứa một hệ thống cuộn dây hoạt động. Rôto chứa một hệ thống nam châm vĩnh cửu. Trong bố trí đồng tâm, rôto có thể là vòng trong, đối với động cơ rôto bên trong, hoặc vòng ngoài, đối với động cơ rôto bên ngoài. Một stato được cấp điện sẽ tạo ra một lực tác động lên rôto do lực điện từ.
Một ổ đỡ duy trì khe hở không khí giữa stato và rôto. Cũng cần có một hệ thống đo để phát hiện vị trí của rôto. Do phạm vi yêu cầu ứng dụng rộng, các dòng động cơ đã được phát triển với nhiều loại stato và rôto khác nhau.
Xét về kết cấu, động cơ mô-men xoắn về cơ bản có thể được chia thành động cơ có hoặc không có lõi thép lá ghép, hoặc động cơ không lõi sắt. Các phân biệt thêm bao gồm vị trí và cấu hình của rôto dưới dạng rôto trong hoặc rôto ngoài, hoặc theo hệ thống nam châm. Ví dụ, nam châm có thể được dán trên bề mặt của một vòng thép, như trong dòng RIB. Hoặc chúng có thể được tích hợp vào lõi thép lá ghép – còn gọi là nam châm chôn – như trong dòng RKIB. Các động cơ tạo ra mô-men xoắn cao một cách ổn định trong dải tốc độ rộng. Mô-men xoắn được xác định bởi diện tích khe hở không khí hoạt động giữa stato và rôto cũng như bởi kết cấu. Người thiết kế phải lựa chọn các cụm động cơ theo yêu cầu công suất. Các động cơ điện thông thường được phân loại theo công suất. Ngược lại, động cơ mô-men xoắn được phân loại theo mô-men xoắn cần thiết.
Bảng 1: Đặc điểm của động cơ mô-men xoắn
| Dòng động cơ | Đặc điểm |
|---|---|
| RIB |
Động cơ chạy trong với mật độ mô-men xoắn cao
|
| RKI và RKIB |
Động cơ chạy trong với mật độ công suất cao
|
1.4 Các giá trị đặc tính chung của động cơ
1.4.1 Tiêu chí hiệu suất
Tổn thất công suất của động cơ mô-men xoắn được ghi trong dữ liệu hiệu năng theo cuộn dây và kích cỡ. Mặc dù động cơ mô-men xoắn tạo ra mô-men xoắn cao khi đứng yên, chúng không cung cấp công suất cơ học nào. Do đó, không có lý do để nêu hiệu suất.
Tuy nhiên, hằng số động cơ km có thể được dùng để so sánh hiệu suất. Hằng số động cơ km xác định mối quan hệ giữa mô-men xoắn và tổn thất đồng được tạo ra tại mô-men xoắn này. Tổn thất công suất làm nóng động cơ. Hơn nữa, hằng số động cơ km chính xác cho dải điều khiển tuyến tính ở trạng thái đứng yên và tại tốc độ thấp cũng như tại nhiệt độ phòng.
Khi động cơ chịu sự gia tăng nhiệt độ, hiệu suất của nó giảm do điện trở cuộn dây tăng. Đối với tốc độ tại tần số đổi cực 100 Hz trở lên, tổn thất đồng còn đi kèm với tổn thất sắt dưới dạng tổn thất trễ phụ thuộc tần số và tổn thất dòng xoáy. Mặc dù tổn thất sắt không được tính trong hằng số động cơ km, chúng có liên quan trong dải tốc độ giới hạn và do đó cần được lưu ý. Hằng số động cơ km chỉ liên quan đến dải tuyến tính của đường đặc tính mô-men xoắn–dòng điện.
Công thức 1: Tổn thất công suất
Pl = ( T / km )2
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Pl | W | Tổn thất công suất |
| T | Nm | Mô-men xoắn |
| km | Nm/√W | Hằng số động cơ |
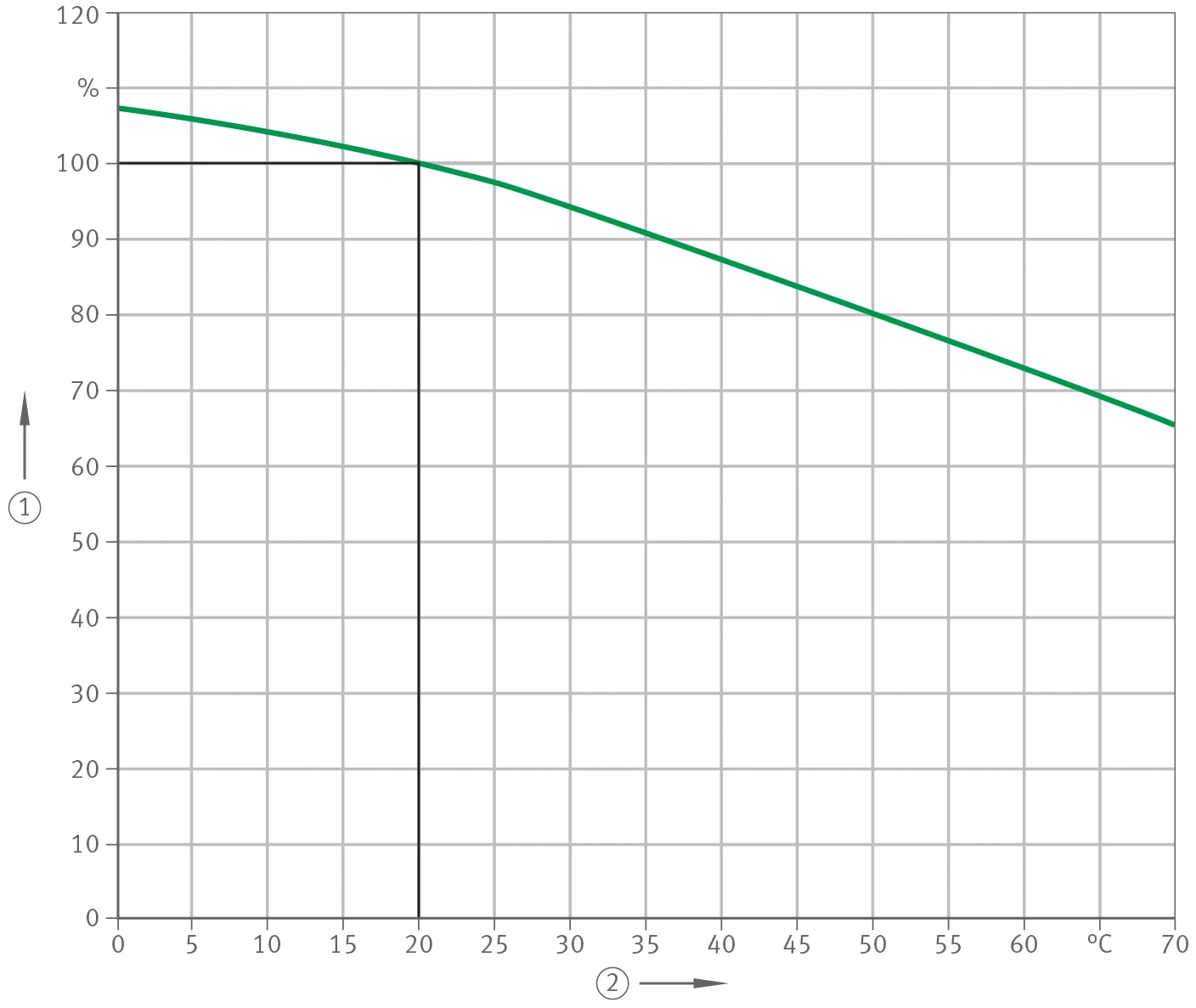
Hằng số động cơ km phụ thuộc vào điện trở thuần và do đó phụ thuộc vào nhiệt độ cuộn dây động cơ. Hằng số động cơ km được nêu trong dữ liệu hiệu năng cho +20 °C. Đường đặc tính thể hiện hằng số động cơ như một hàm của nhiệt độ.
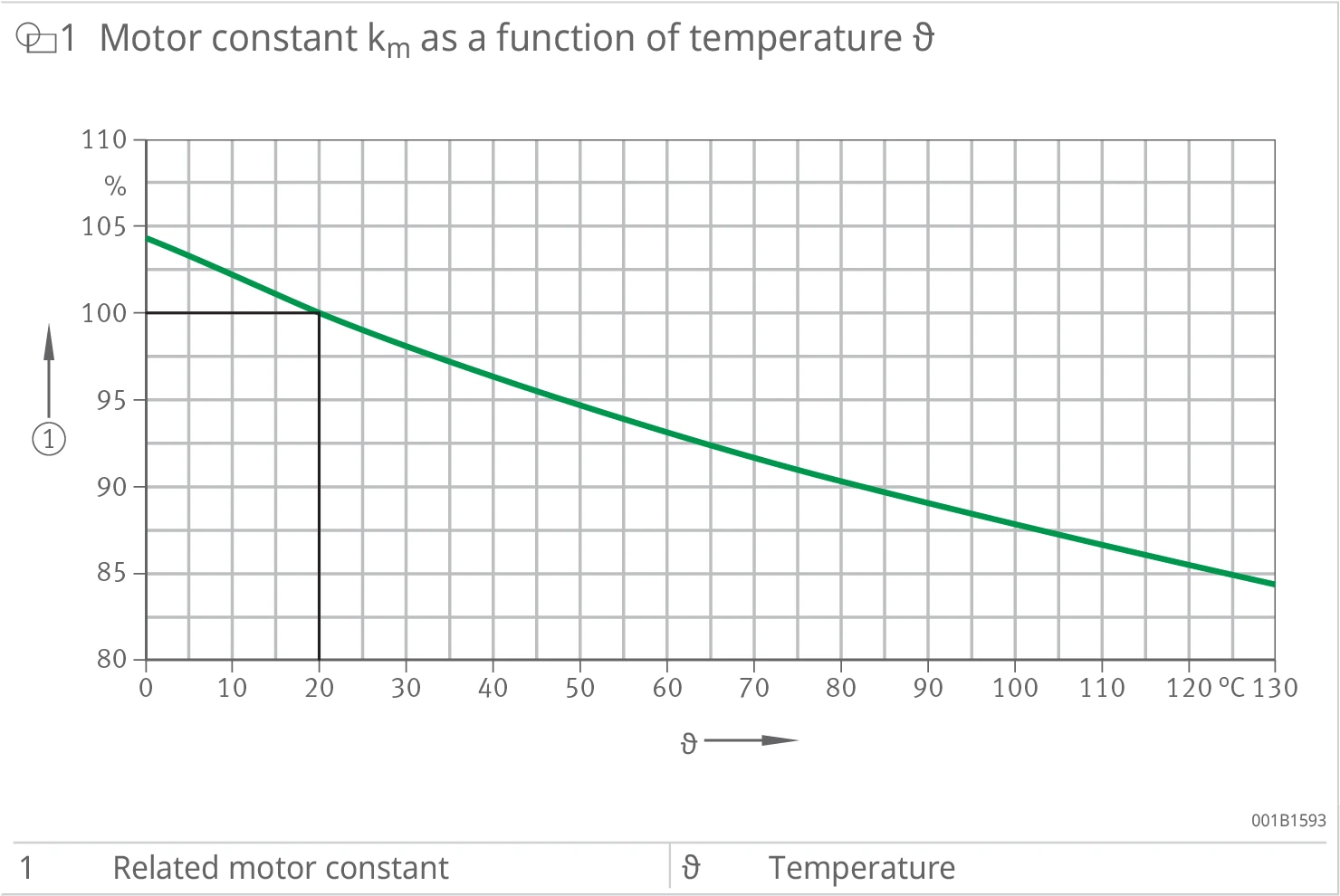
Hình 1: Hằng số động cơ km như một hàm của nhiệt độ ϑ. Trục đứng là hằng số động cơ tương đối (%), trục ngang là nhiệt độ ϑ (°C). Đường cong đạt 100% tại +20 °C, giảm dần khi nhiệt độ tăng, xuống còn khoảng 84% tại +130 °C. ①=hằng số động cơ tương đối, ϑ=nhiệt độ.
Đặc tính nhiệt
Sự gia tăng nhiệt độ làm tăng điện trở cuộn dây, dẫn đến giảm hằng số động cơ km. Tại +130 °C, hằng số động cơ km giảm xuống còn 0,84 lần giá trị bình thường. Tại một dòng điện không đổi – dòng điện này lại tạo ra mô-men xoắn – động cơ bị nóng sẽ phát sinh tổn thất công suất cao hơn so với động cơ nguội. Tổn thất công suất này lại tiếp tục làm tăng nhiệt độ động cơ.
1.4.2 Thiết kế cuộn dây và các phụ thuộc
Trước hết, dòng động cơ quyết định các tốc độ giới hạn của một động cơ mô-men xoắn. Các thiết kế sau đây là khả thi:
- Động cơ mô-men xoắn RIB: Stato có lõi sắt lá ghép. Đối với rôto, nam châm được dán lên một vòng thép.
- Động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB: Stato có lõi sắt lá ghép. Đối với rôto, nam châm được tích hợp vào lõi lá ghép.
Trong một dòng động cơ, kích cỡ, điện áp mạch một chiều và thiết kế cuộn dây ảnh hưởng đến các tốc độ giới hạn.
Sụt áp bên trong động cơ làm tăng nhu cầu điện áp khi tốc độ tăng. Tại tốc độ điểm gãy được nêu trong dữ liệu hiệu năng, nhu cầu điện áp tương ứng với điện áp mạch một chiều của bộ chuyển đổi servo có điều khiển định hướng từ trường, sau đó tốc độ giảm nhanh. Điện áp mạch một chiều càng cao và hằng số điện áp kû gắn với cuộn dây càng nhỏ thì tốc độ giới hạn đạt được càng cao. Vì có mối tương quan giữa hằng số điện áp và hằng số mô-men xoắn, nhu cầu công suất của động cơ tăng khi yêu cầu tốc độ cao hơn ở cùng một mô-men xoắn. Một hoặc nhiều cuộn dây tiêu chuẩn được định trước cho các tốc độ giới hạn và yêu cầu động học khác nhau tại một điện áp mạch một chiều UDCL cố định.
1.4.2.1 Thay đổi điện áp mạch một chiều
Điện áp mạch một chiều ảnh hưởng đến các giới hạn tốc độ riêng theo cuộn dây. Nếu điện áp mạch một chiều thay đổi tối đa ±10 %, có thể giả định một mối quan hệ tỷ lệ giữa điện áp mạch một chiều và các giới hạn tốc độ để lựa chọn sơ bộ động cơ. Các giới hạn tốc độ chính xác cho điện áp mạch một chiều đặc thù theo khách hàng có thể nhận được thông qua các kỹ sư ứng dụng cũng như bộ phận kinh doanh của Schaeffler Industrial Drives.
Tại điện áp mạch một chiều thấp hơn, tốc độ giới hạn giảm. Đường đặc tính mô-men xoắn–dòng điện thể hiện mô-men xoắn tại các điểm vận hành khác nhau. Các đường đặc tính mô-men xoắn–tốc độ thể hiện mối quan hệ giữa mô-men xoắn và tốc độ tại nhiều điểm vận hành khác nhau.
Các đường cong mô-men xoắn–tốc độ có sẵn dưới dạng bảng dữ liệu từ các kỹ sư ứng dụng và bộ phận kinh doanh của Schaeffler Industrial Drives. Liên hệ: sales-sid@schaeffler.com
1.4.3 Đường đặc tính mô-men xoắn/tốc độ
Động cơ mô-men xoắn RIB
Đường đặc tính mô-men xoắn–tốc độ của động cơ mô-men xoắn RIB thể hiện các giới hạn tốc độ riêng theo cuộn dây như một hàm của mô-men xoắn tại điện áp mạch một chiều không đổi mà không suy giảm từ trường. Đường đặc tính không mô tả chu trình làm việc và đặc tính nhiệt liên quan của động cơ. Đường đặc tính chỉ biểu diễn dải mà động cơ có thể đạt tới ở nhiệt độ cuộn dây +20 °C.
Các điểm vận hành tại mô-men xoắn vượt quá Tcw phải chịu giới hạn thời gian nhằm bảo vệ stato khỏi quá nhiệt. Tại Tu, nhiệt độ đầu ra của rôto quá cao có thể dẫn đến khử từ.
Tại n > nlwS1, động cơ chỉ có thể vận hành trong một khoảng thời gian nhất định do các tổn thất phụ thuộc tần số bổ sung. Ngoài ra, có thể giảm dòng điện để vận hành liên tục. Tốc độ định mức (S1), có làm mát, nlwS1, cũng có thể bằng nlw tùy thuộc vào kích cỡ động cơ và thiết kế cuộn dây.
Tốc độ giới hạn nlc tại Ic eff và Tc quan trọng để hiểu đường đặc tính, nhưng không được nêu trong dữ liệu hiệu năng do tầm quan trọng thứ yếu của nó.
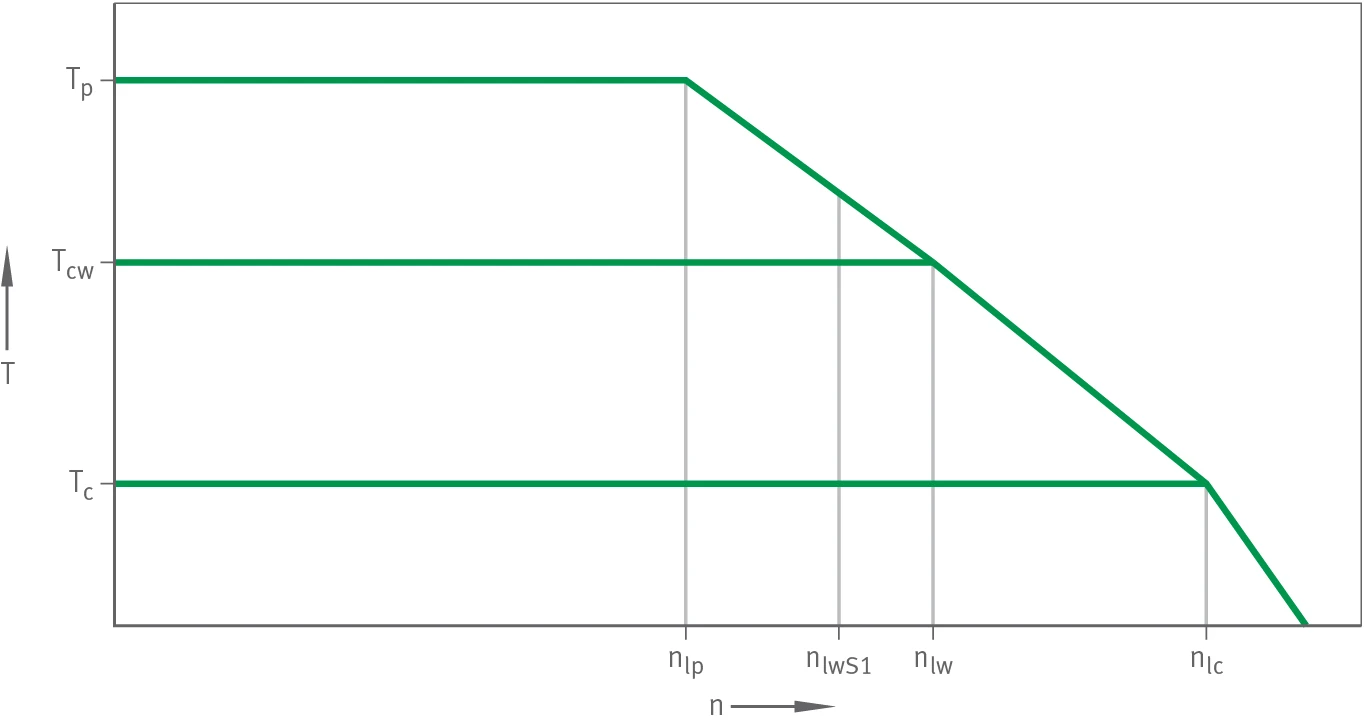
Hình 2: Động cơ mô-men xoắn RIB: Đường đặc tính mô-men xoắn–tốc độ. Trục đứng là mô-men xoắn T, trục ngang là tốc độ n. Đường cong thể hiện ba mức mô-men xoắn Tp, Tcw, Tc với các giới hạn tốc độ tương ứng nlp, nlwS1, nlw, nlc. Định nghĩa ký hiệu: T=mô-men xoắn, n=tốc độ, Tc=mô-men xoắn liên tục, không làm mát, Tcw=mô-men xoắn liên tục, có làm mát, Tp=mô-men xoắn đỉnh, nlc=tốc độ giới hạn tại Ic eff và UDCL, nlp=tốc độ giới hạn tại Ip eff và UDCL, nlw=tốc độ điểm gãy, nlwS1=tốc độ định mức S1, có làm mát.
Động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB
Đường đặc tính mô-men xoắn–tốc độ cho các tốc độ liên tục thể hiện các giới hạn tốc độ riêng theo cuộn dây như một hàm của mô-men xoắn tại tốc độ cao và điện áp mạch một chiều không đổi với suy giảm từ trường. Động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB có thể vận hành liên tục tại các điểm vận hành thể hiện trong đường đặc tính.
Vận hành tại mô-men xoắn liên tục Tcw là khả thi đến tốc độ nlwS1. Tại tốc độ cao hơn đến tốc độ nlw2, vận hành liên tục đòi hỏi giảm dòng điện từ Icw eff xuống Icw2 eff. Mô-men xoắn tương ứng là Tcw2.
Giữa nlw2 và nlw3, dòng điện liên tục tối đa cho phép cũng là Icw2 eff. Diễn biến mô-men xoắn tương ứng phụ thuộc vào cuộn dây và cấu hình rôto. Tại nlw3 và Icw2 eff, mô-men xoắn tương ứng là Tcw3. Công suất cơ học tại điểm vận hành này là Pmax S1. Diễn biến chính xác giữa nlw2 và nlw3 chỉ có thể thấy trong bảng dữ liệu đặc thù theo sản phẩm, cần được yêu cầu từ Schaeffler Industrial Drives.
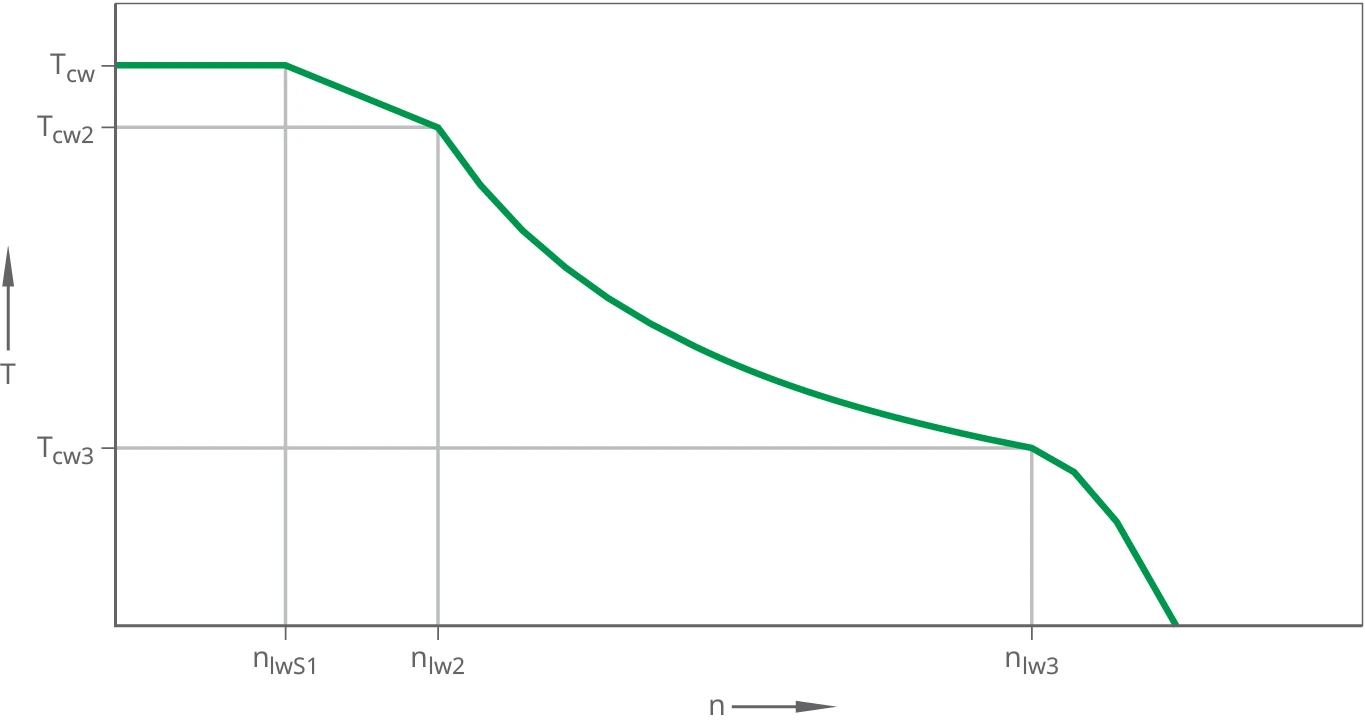
Hình 3: Động cơ mô-men xoắn RKIB: Đường đặc tính mô-men xoắn–tốc độ cho các tốc độ liên tục. Trục đứng là mô-men xoắn T, trục ngang là tốc độ n. Đường cong thể hiện Tcw, Tcw2, Tcw3 với các giới hạn tốc độ tương ứng nlwS1, nlw2, nlw3. Định nghĩa ký hiệu: n=tốc độ, T=mô-men xoắn, Tcw=mô-men xoắn liên tục, có làm mát, Tcw2=mô-men xoắn tại Icw2 eff và nlw2, Tcw3=mô-men xoắn tại Icw2 eff và nlw3, nlwS1=tốc độ định mức S1, có làm mát, nlw2=tốc độ vận hành FS tại Icw2 eff và UDCL, nlw3=tốc độ giới hạn tại Icw2 eff và UDCL trong vận hành liên tục.
Dự trữ điều khiển: Tất cả các tốc độ nêu trên đều liên quan đến điện áp mạch một chiều UDCL không đổi. Với các bộ biến tần không có mạch một chiều ổn định, UDCL không phải là hằng số. Do đó, điểm vận hành phải được cung cấp một dự trữ điều khiển như một hàm của dao động điện áp mạch một chiều. Thông thường, với các bộ biến tần không có mạch một chiều ổn định, tốc độ tại điểm vận hành không nên vượt quá khoảng 80 % tốc độ khả thi của động cơ tại điểm vận hành này.
1.4.4 Đường đặc tính mô-men xoắn/dòng điện
Một dòng điện động cơ trong khoảng từ 0 A đến dòng điện đỉnh tuyến tính Ipl eff tạo ra một mô-men xoắn phụ thuộc tuyến tính. Dòng điện đỉnh Ipl eff tạo ra mô-men xoắn đỉnh tuyến tính Tpl. Hằng số động cơ km thích hợp để tính tổn thất công suất trong khoảng từ 0 A đến Ipl eff. Hằng số mô-men xoắn kT được dùng trong khoảng này để tính mô-men xoắn dựa trên dòng điện, hoặc ngược lại.
Giá trị của dòng điện đỉnh tuyến tính Ipl eff không phụ thuộc vào nhiệt độ. Giá trị này phụ thuộc vào dòng động cơ và thiết kế cuộn dây. Nó có thể thấp hơn hoặc cao hơn giá trị của dòng điện liên tục có làm mát Icw eff. Dòng điện đỉnh tuyến tính Ipl eff và mô-men xoắn đỉnh tuyến tính tương ứng Tpl quan trọng để hiểu đường đặc tính. Tuy nhiên, vì các giá trị này có rất ít ý nghĩa thực tiễn, chúng không được liệt kê trong dữ liệu hiệu năng.
Đường đặc tính mô-men xoắn–dòng điện không còn tuyến tính khi I > Ip eff. Sự bão hòa các mạch từ của động cơ gây ra tính phi tuyến này. Giữa các điểm mô-men xoắn–dòng điện Tp tại Ip eff và Tu tại Iu eff, đường đặc tính trở nên phi tuyến. Trong dải này, độ dốc của đường cong thay đổi và thấp hơn đáng kể so với giá trị của hằng số mô-men xoắn kT.
Động cơ có thể vận hành trong vài giây đến điểm vận hành Tp, Ip eff. Đây là điểm vận hành tối đa cho các quá trình gia tốc. Do nguy cơ khử từ các nam châm vĩnh cửu, động cơ không được vận hành vượt quá điểm giới hạn Tu, Iu eff.
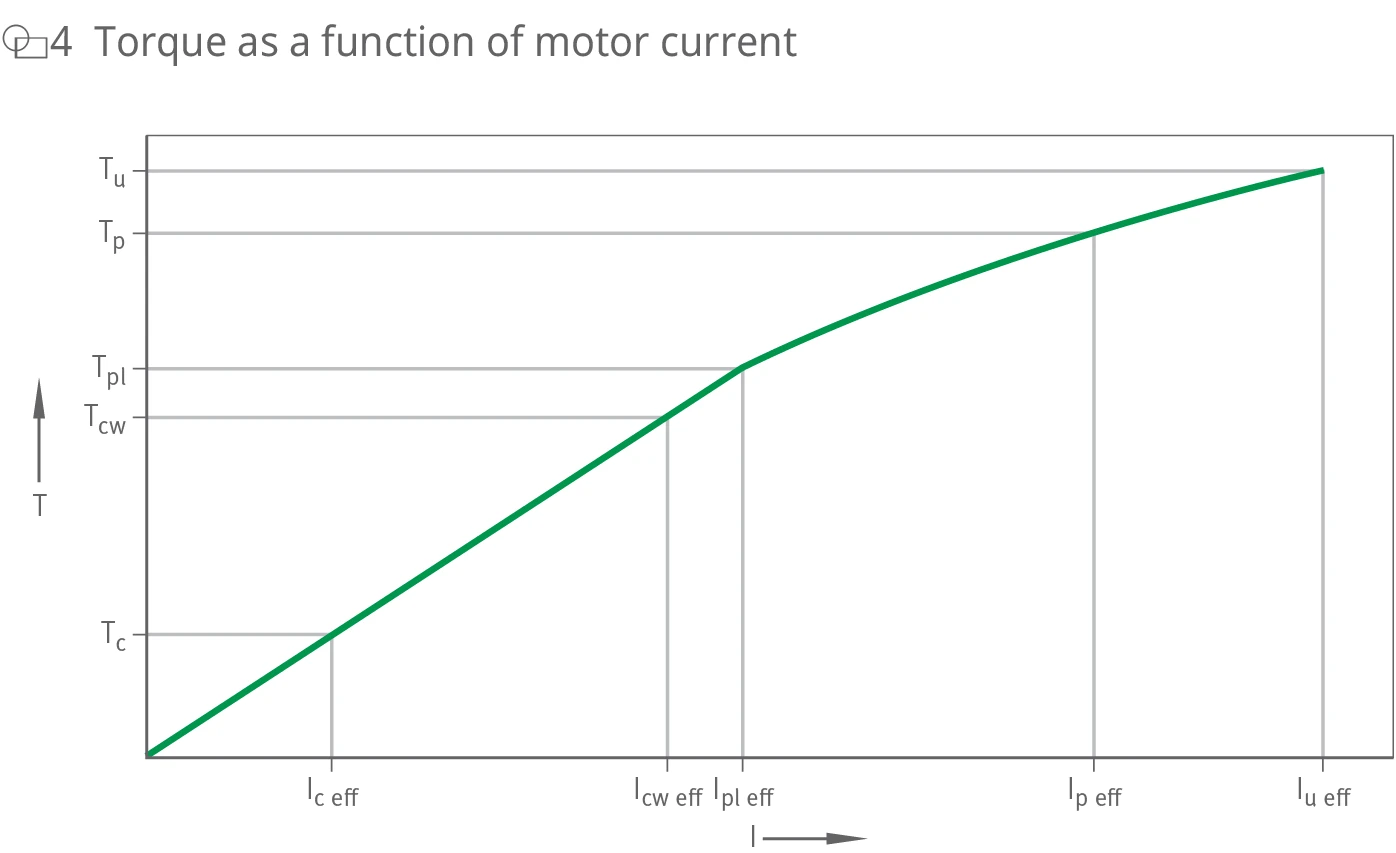
Hình 4: Mô-men xoắn như một hàm của dòng điện động cơ. Trục đứng là mô-men xoắn T, trục ngang là dòng điện động cơ I. Đường cong tuyến tính giữa 0 và Ip eff, và trở nên phi tuyến vượt quá đó do bão hòa từ, đến Tu, Iu eff. Các mức mô-men xoắn Tc, Tcw, Tpl, Tp, Tu và các điểm dòng điện Ic eff, Icw eff, Ipl eff, Ip eff, Iu eff được đánh dấu.
1.5 Bảo vệ nhiệt cho động cơ
1.5.1 Mạch giám sát I và II
Người dùng thường vận hành các bộ truyền động trực tiếp ở giới hạn hiệu năng nhiệt của chúng. Ngoài ra, một quá tải không lường trước có thể xảy ra trong quá trình vận hành. Quá tải dẫn đến tải dòng điện cao hơn dòng điện liên tục cho phép. Trong trường hợp quá tải, dòng điện động cơ hiệu dụng, tức giá trị trung bình bình phương I²t, không được vượt quá dòng điện động cơ liên tục cho phép. Đối với quá dòng ngắn hạn, bộ điện tử công suất phải có một mô hình bảo vệ động cơ I²t để kiểm soát dòng điện động cơ. Việc giám sát nhiệt độ gián tiếp này rất nhanh và đáng tin cậy. Trong quá trình đưa động cơ vào vận hành, người dùng phải bảo đảm rằng việc giám sát I²t đã được bật.
Động cơ của Schaeffler Industrial Drives phải được bảo vệ bằng phương tiện giám sát nhiệt độ động cơ. Mạch giám sát I của phiên bản tiêu chuẩn chứa 3 cảm biến PTC, đấu nối tiếp, trên 3 cuộn dây pha. Mạch giám sát II còn bao gồm một cảm biến Pt1000 trên một pha trong động cơ. Cảm biến này cho phép thiết lập các ngưỡng cảnh báo sớm.
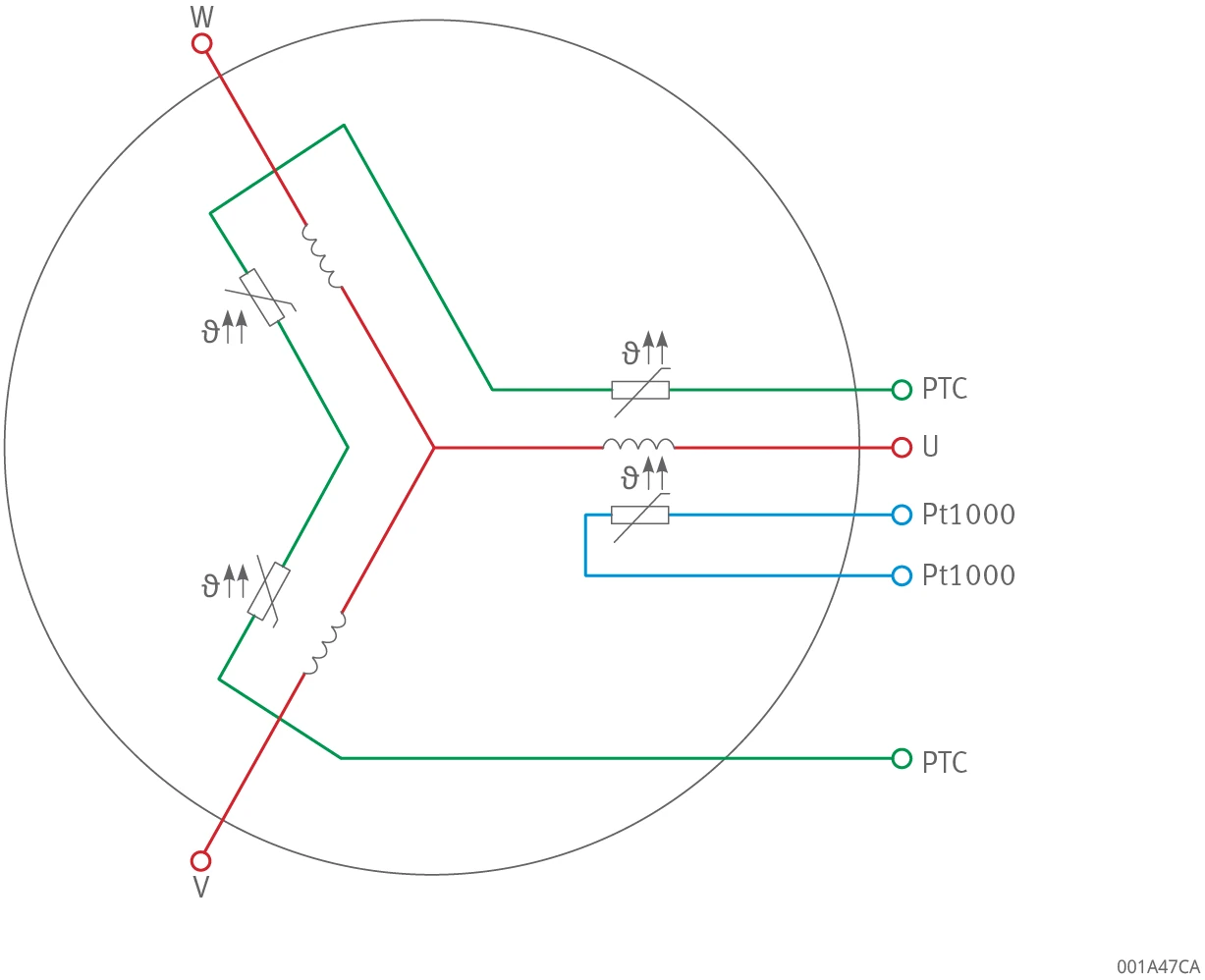
Hình 5: Đấu nối tiêu chuẩn của bộ ba PTC và Pt1000. Thể hiện bố trí cực đấu nối của 3 cảm biến PTC đấu nối tiếp trên các cuộn dây ba pha U, V, W của động cơ, và một cảm biến Pt1000 trên một pha.
Các cảm biến PTC và Pt1000 có cách điện cơ bản với động cơ. Các cảm biến không phù hợp để đấu nối trực tiếp với mạch PELV hoặc mạch SELV theo DIN EN 61800-5-1.
1.5.2 Mạch giám sát I
PTC là một điện trở nhiệt. PTC có hằng số thời gian nhiệt vài giây. Khác với Pt1000, điện trở của PTC tăng rất mạnh khi nhiệt độ tác động danh định ϑn bị vượt quá. Điện trở tăng lên gấp nhiều lần giá trị nguội khi nhiệt độ tác động danh định bị vượt quá.
Khi sử dụng một bộ ba PTC, tức ba cảm biến PTC đấu nối tiếp, tổng điện trở thay đổi đáng kể. Sự thay đổi đáng kể này cũng xảy ra ngay cả khi chỉ một cảm biến vượt quá nhiệt độ tác động ϑn. Việc sử dụng ba cảm biến PTC bảo đảm rằng động cơ vẫn có thể được ngắt an toàn bởi một rơ-le bảo vệ động cơ kiểu điện trở nhiệt dưới tải pha bất đối xứng, ví dụ ở trạng thái đứng yên. Rơ-le bảo vệ động cơ kiểu điện trở nhiệt thường nhả giữa 1,5 kΩ và 3,5 kΩ, qua đó kích hoạt một lệnh dừng bộ điều khiển.
Các cảm biến PTC phát hiện quá nhiệt của mỗi cuộn dây với sai lệch chỉ vài độ.
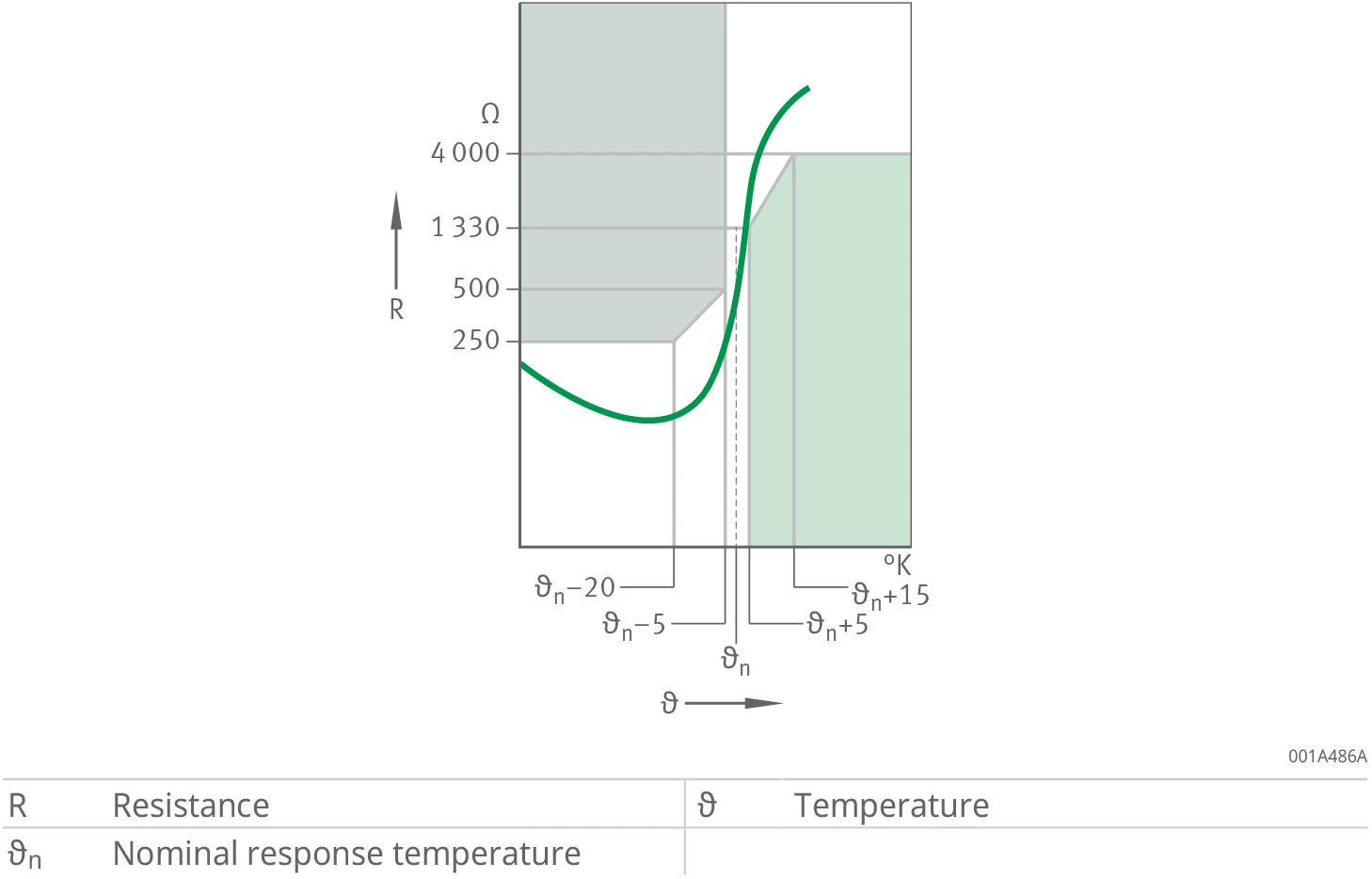
Hình 6: Đặc tính nhiệt độ của PTC. Trục đứng là điện trở R (Ω), trục ngang là nhiệt độ ϑ. Điện trở thấp dưới nhiệt độ tác động danh định ϑn và tăng mạnh vượt quá đó. Các mức điện trở 250, 500, 1330, 4000 Ω và các dải nhiệt độ ϑn−20, ϑn−5, ϑn, ϑn+5, ϑn+15 được đánh dấu. Định nghĩa ký hiệu: R=điện trở, ϑ=nhiệt độ, ϑn=nhiệt độ tác động danh định.
Rơ-le bảo vệ động cơ kiểu điện trở nhiệt cũng phản ứng nếu điện trở trong mạch PTC quá thấp. Điện trở quá thấp có thể chỉ báo một lỗi trong mạch giám sát. Rơ-le bảo vệ động cơ kiểu điện trở nhiệt bảo đảm cách ly điện an toàn giữa bộ điều khiển và các cảm biến PTC trong động cơ. Rơ-le bảo vệ động cơ kiểu điện trở nhiệt không nằm trong phạm vi cung cấp của động cơ. Các cảm biến PTC của mạch giám sát nhiệt độ I không phù hợp để đo nhiệt độ. Mạch giám sát II phù hợp để đo nhiệt độ.
Về nguyên tắc, một rơ-le bảo vệ động cơ kiểu điện trở nhiệt được đấu nối với bộ chuyển đổi servo phải đánh giá các cảm biến PTC để bảo vệ nhiệt cho động cơ.
1.5.3 Mạch giám sát II
Pt1000 là một cảm biến nhiệt độ kiểu điện trở đo bằng bạch kim. Cảm biến này sử dụng sự phụ thuộc nhiệt độ của điện trở điện của bạch kim. EN 60751 mô tả đặc tính của cảm biến.
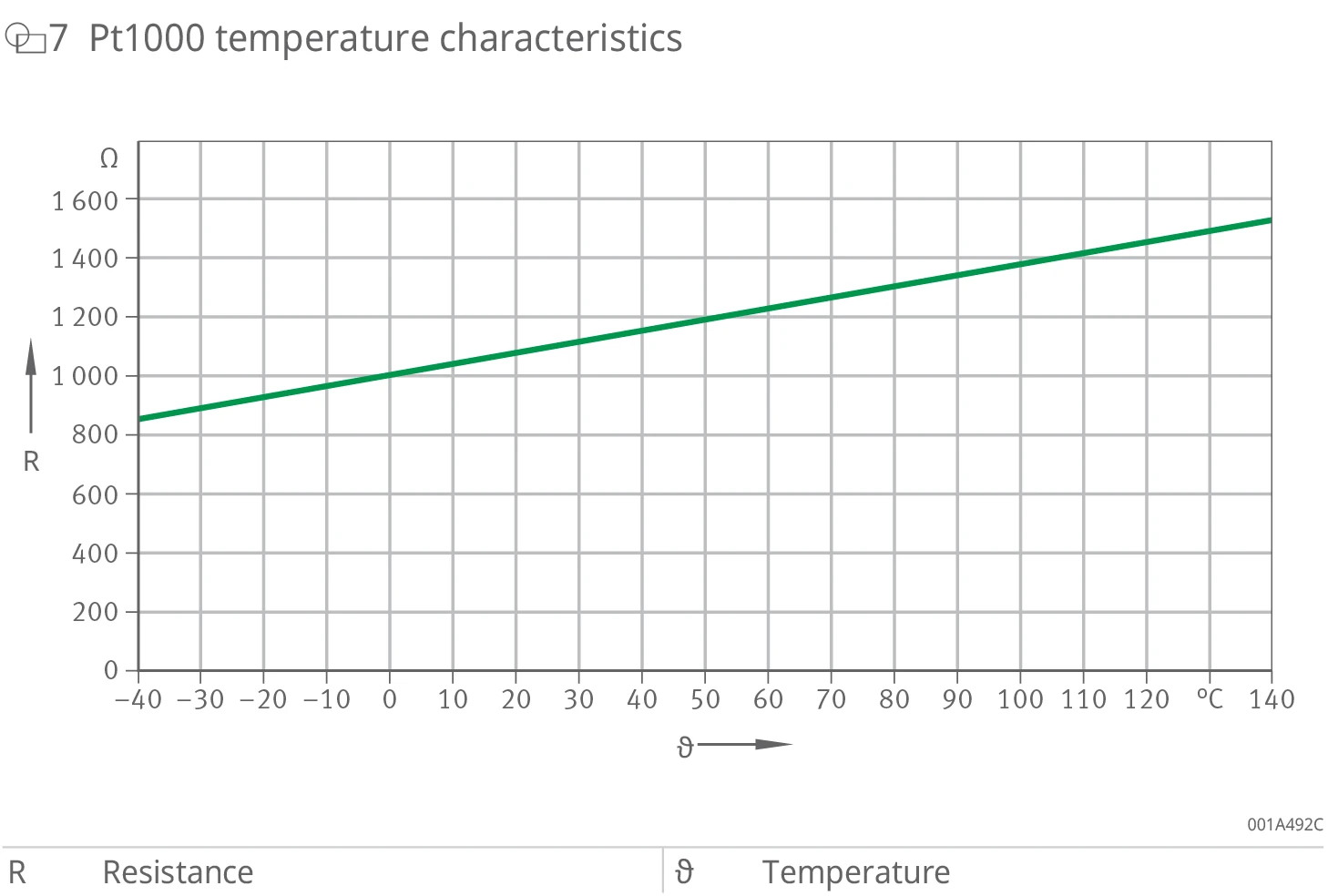
Hình 7: Đặc tính nhiệt độ của Pt1000. Trục đứng là điện trở R (Ω), trục ngang là nhiệt độ ϑ (−40 đến +140 °C). Đường cong tăng tuyến tính, từ khoảng 800 Ω (−40 °C) đến khoảng 1540 Ω (+140 °C). Định nghĩa ký hiệu: R=điện trở, ϑ=nhiệt độ.
Hằng số thời gian nhiệt là vài giây khi đã lắp đặt. Ngưỡng cảnh báo sớm và một giới hạn ngắt được nhập vào bộ điều khiển và bảo vệ động cơ khỏi quá nhiệt. Ngưỡng cảnh báo sớm ngăn việc ngắt ngay lập tức bởi rơ-le bảo vệ động cơ kiểu điện trở nhiệt.
Ở trạng thái đứng yên, tùy theo ứng dụng, các dòng điện không đổi có thể chạy qua các cuộn dây của động cơ. Vị trí cực quyết định độ lớn của các dòng điện không đổi. Động cơ không được làm nóng đồng đều do sự phụ thuộc này. Các cuộn dây không được giám sát có thể bị quá nhiệt. Một cảm biến Pt1000 chỉ có thể giám sát một pha. Việc sử dụng và đánh giá ba cảm biến Pt1000 bảo đảm việc giám sát tất cả các pha. Đối với các ứng dụng thường xuyên đạt đến giới hạn tải ở trạng thái đứng yên, Schaeffler Industrial Drives khuyến nghị sử dụng và đánh giá ba cảm biến Pt1000.
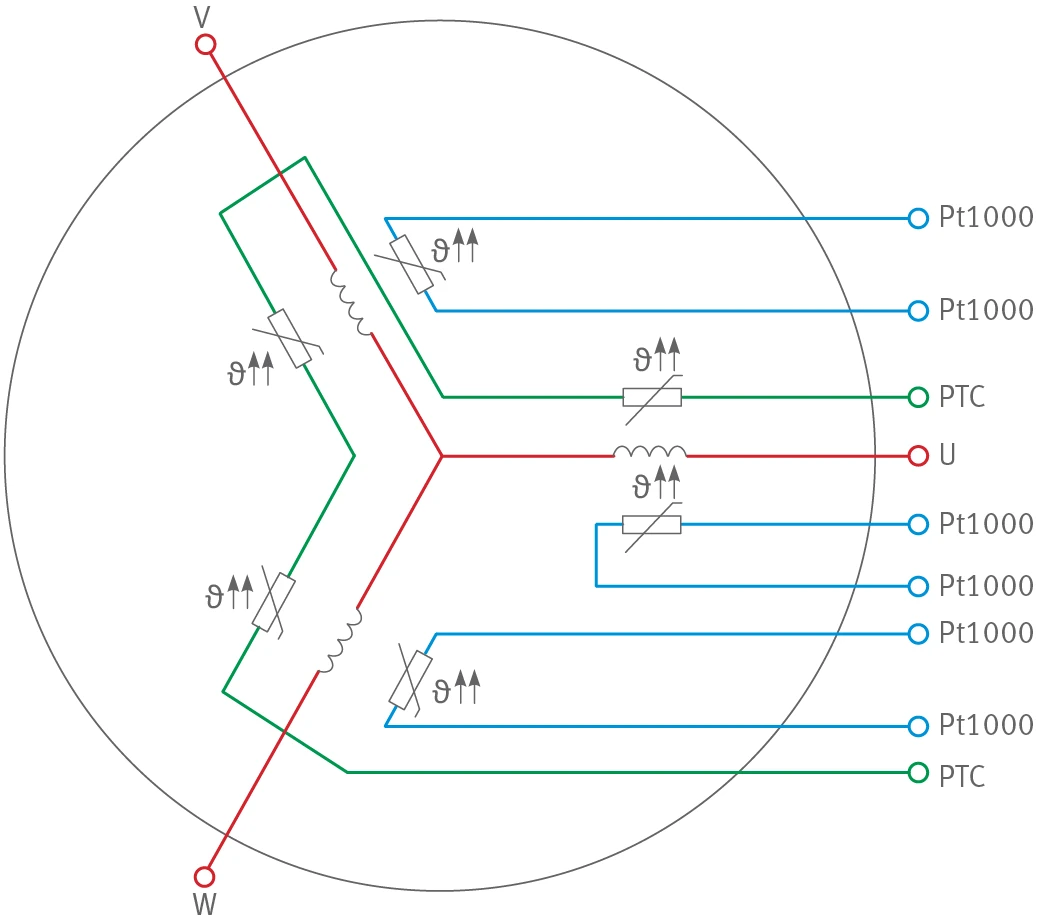
Hình 8: Đấu nối của bộ ba PTC và 3 Pt1000. Thể hiện bố trí cực đấu nối của 3 PTC (nối tiếp) và 3 cảm biến Pt1000 trên các cuộn dây ba pha V, U, W của động cơ.
1.6 Công nghệ đấu nối điện
1.6.1 Đấu nối cáp tiêu chuẩn
Các đấu nối cáp tiêu chuẩn của động cơ Schaeffler Industrial Drives được trang bị một đầu nối ren theo phương trục. Đối với động cơ mô-men xoắn RIB, vị trí tương đối của chúng so với các đầu nối làm mát nằm ở giữa lối ra cáp. Đối với động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB có nhiều lối ra cáp, vị trí tương đối không thể được xác định một cách phổ quát. Bản vẽ báo giá và bản vẽ giao hàng cùng mô hình 3D có giá trị ưu tiên và cung cấp một vị trí ràng buộc.
Động cơ mô-men xoắn RIB được cung cấp kèm một cáp dài 2 m. Chiều dài cáp được đo từ lối ra của động cơ. Động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB được cung cấp kèm cáp dài 2 m hoặc 5 m. Có sẵn các chiều dài cáp tùy chỉnh.
Tiết diện của cáp đấu nối nguồn phụ thuộc vào dòng điện liên tục của động cơ. Theo tiêu chuẩn, việc định cỡ dựa trên dòng điện liên tục Icw eff tại Plw (có làm mát). Có thể sử dụng các lối ra cáp theo phương trục, hướng kính và tiếp tuyến. Lối ra cáp mong muốn được xác định khi đặt hàng. Đối với dòng điện động cơ trên 70 A, các lối ra cáp được điều chỉnh theo ứng dụng cụ thể.
Các cáp có các đặc tính sau:
- có bọc giáp chống nhiễu
- kháng dầu và chất làm mát nhờ bề mặt ngoài bằng polyurethane
- chống cháy
- phù hợp để sử dụng trong xích cáp
Các đầu cáp để hở với đầu cốt ở phiên bản tiêu chuẩn. Có thể có các lối ra cáp đặc thù theo ứng dụng.
Bảng 2: Đấu nối cáp động cơ, tiêu chuẩn
| Tiết diện | Dòng điện liên tục | Đường kính | bán kính uốn tối thiểu, cố định | bán kính uốn tối thiểu, linh hoạt | Khối lượng |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4G0,75 | 10,4 | 8 | 40 | 80 | 95 |
| 4G1,5 | 16,1 | 9 | 45 | 90 | 140 |
| 4G2,5 | 22 | 10,5 | 52,5 | 105 | 210 |
| 4G4 | 30 | 12,5 | 62,5 | 125 | 296 |
| 4G6 | 37 | 14,5 | 72,5 | 145 | 416 |
| 4G10 | 52 | 17 | 85 | 170 | 644 |
| 4G16 | 70 | 20,5 | 102,5 | 205 | 997 |
Bảng 3: Phân định đấu nối động cơ
| Ký hiệu | Phân định |
|---|---|
| 1/U | Pha U |
| 2/V | Pha V |
| 3/W | Pha W |
| GNYE | PE |
Cáp cảm biến cho phép giám sát nhiệt độ với các cảm biến PTC và Pt1000. Các đầu cáp để hở với đầu cốt ở phiên bản tiêu chuẩn. Có thể có các lối ra cáp đặc thù theo ứng dụng.
Bảng 4: Đấu nối cáp cảm biến, tiêu chuẩn
| Tiết diện | Giám sát nhiệt độ | Đường kính | bán kính uốn tối thiểu, cố định | bán kính uốn tối thiểu, linh hoạt | Khối lượng |
|---|---|---|---|---|---|
| – | – | mm | mm | mm | g/m |
| Cảm biến 4×0,14 | P 1) | 4,8 | 24 | 36 | 40 |
| Cảm biến 7×0,14 | – | 5,7 | 29 | 43 | 67 |
| Cảm biến 10×0,14 | T 2) | 6,7 | 34 | 50 | 87 |
1) P = 1 Pt1000 + 3 PTC 2) T = 3 Pt1000 + 3 PTC
Bảng 5: Phân định đấu nối, biến thể cảm biến P
| Ký hiệu | Phân định |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000 |
| YE | Pt1000 |
Bảng 6: Phân định đấu nối, biến thể cảm biến T
| Ký hiệu | Phân định |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000-1 |
| YE | Pt1000-1 |
| GY | Pt1000-2 |
| PK | Pt1000-2 |
| BU | Pt1000-3 |
| RD | Pt1000-3 |
1.6.2 Đấu nối cáp đặc biệt
Đối với động cơ mô-men xoắn RKI và động cơ mô-men xoắn RKIB, việc sử dụng các dây đơn có bọc giáp chống nhiễu có thể hợp lý trong một số trường hợp nhất định. Các dây được chọn và vị trí của chúng có thể được tìm thấy trong bản vẽ báo giá và bản vẽ giao hàng cũng như sơ đồ mạch báo giá. Các giá trị đặc tính chung của các dây đơn có thể được tìm thấy trong bảng.
Bảng 7: Đấu nối cáp động cơ, thiết kế đặc biệt
| Tiết diện | Dòng điện liên tục | Đường kính | bán kính uốn tối thiểu, cố định | bán kính uốn tối thiểu, linh hoạt | Khối lượng |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4×(1×2,5) | 22 | 4×6 | 24 | 45 | 4×58 |
| 4×(1×4) | 30 | 4×6,5 | 26 | 49 | 4×77 |
| 4×(1×6) | 37 | 4×7 | 28 | 53 | 4×101 |
| 4×(1×10) | 52 | 4×8,5 | 34 | 64 | 4×146 |
| 4×(1×16) | 70 | 4×10 | 40 | 75 | 4×223 |
| 4×(1×25) | 88 | 4×12 | 48 | 90 | 4×329 |
| 4×(1×35) | 110 | 4×13 | 52 | 98 | 4×444 |
1.6.3 Chiều quay dương của động cơ
Chiều quay dương về điện tương ứng với một từ trường quay theo chiều kim đồng hồ ở tất cả các động cơ ba pha, tức là các điện áp pha được cảm ứng theo thứ tự U, V, W. Động cơ của Schaeffler Industrial Drives có chiều quay dương sau đây với chuyển động của rôto:
- ngược chiều kim đồng hồ khi nhìn phía lối ra cáp từ trên xuống
- theo chiều kim đồng hồ khi nhìn phía đối diện lối ra cáp từ dưới lên
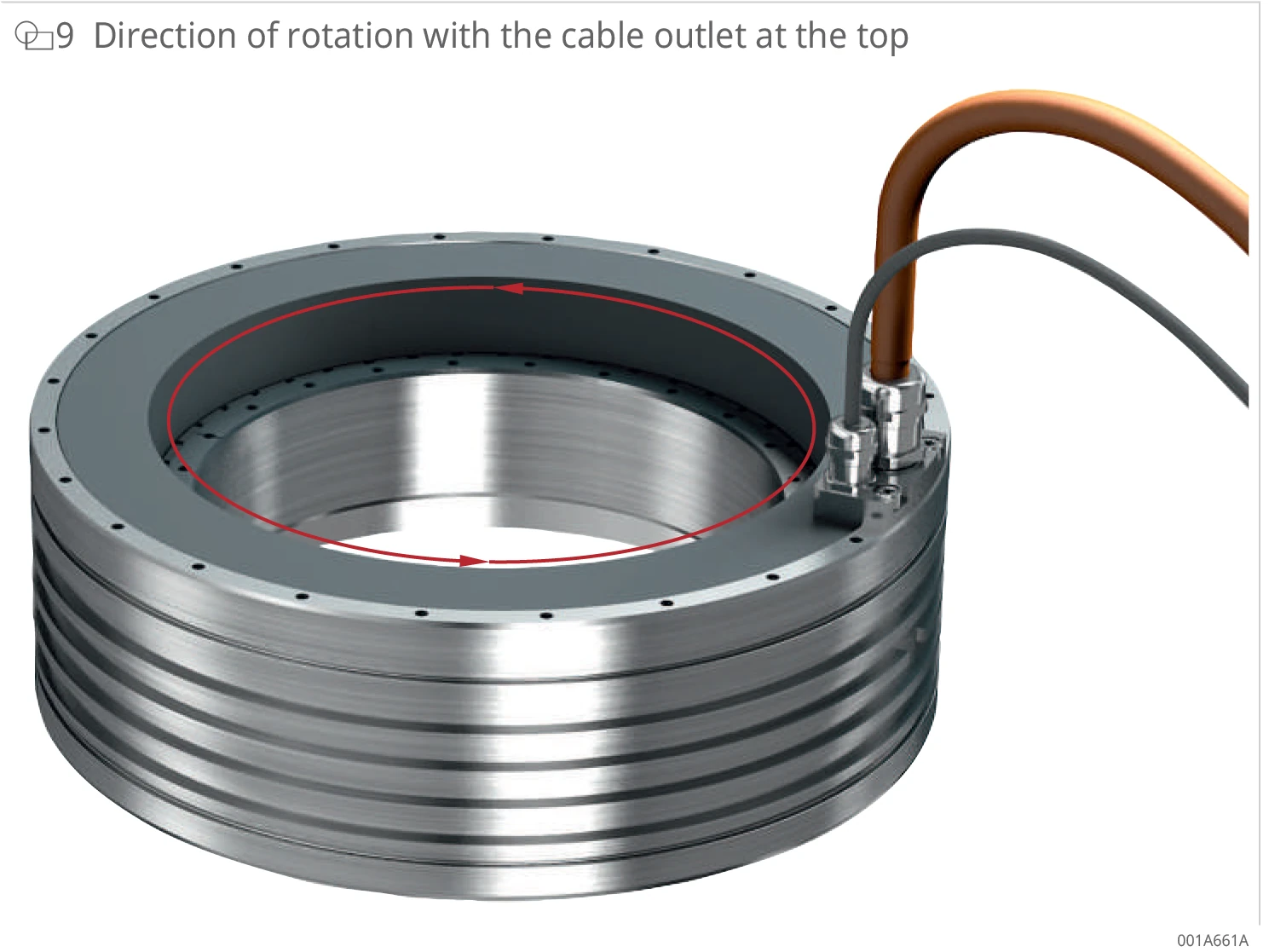
Hình 9: Chiều quay khi lối ra cáp ở phía trên. Ảnh động cơ đánh dấu chiều quay với chuyển động của rôto (mũi tên đỏ, ngược chiều kim đồng hồ).
1.6.4 Chuyển mạch
Các động cơ đồng bộ nên được vận hành với chuyển mạch khi có thể. Schaeffler khuyến nghị chuyển mạch dựa trên hệ thống đo, vì điều này được hỗ trợ bởi các bộ truyền động servo và bộ điều khiển hiện đại.
1.6.5 Độ bền cách điện và các hiện tượng quá áp
Schaeffler Industrial Drives phát triển, thiết kế và chế tạo động cơ theo chỉ thị sau: 2014/35/EU, Thiết bị điện sử dụng trong một số giới hạn điện áp nhất định. Các động cơ đáp ứng các yêu cầu của chỉ thị sau: 2014/30/EU, Tương thích điện từ. Các động cơ được dùng cho vận hành theo mục đích trong một PDS (hệ truyền động công suất) theo DIN EN 61800-5-1.
Các hệ thống cách điện của động cơ được thiết kế theo loại quá áp III và được tối ưu hóa cho tuổi thọ tối đa. Độ bền điện môi của các hệ thống cách điện được kiểm tra trước khi giao hàng. Các phương pháp kiểm tra hiện đại, chẳng hạn như đo điện áp khởi phát phóng điện cục bộ, bảo đảm tuổi thọ và hiệu năng của động cơ trong một khoảng thời gian dài.
Khi đã được lắp đặt, động cơ là một phần của PDS, bao gồm động cơ, cáp động cơ và các thành phần bộ chuyển đổi như mô-đun cấp nguồn, mô-đun hồi năng, bộ điều khiển truyền động và bộ lọc. Các tác động không mong muốn và không lường trước có thể xảy ra trong PDS. Các nhà sản xuất bộ điều khiển thường cung cấp các khuyến nghị và thông tin lập kế hoạch dự án mà người dùng nên tuân theo và chấp hành. Nếu không làm như vậy có thể dẫn đến hỏng sớm các hệ thống cách điện của động cơ hoặc bộ chuyển đổi.
Các biện pháp sau bảo đảm vận hành an toàn hơn, bất kể bộ chuyển đổi nào:
- Hỗ trợ cáp ngắn và bọc giáp cáp diện tích lớn: Cáp ngắn và việc hỗ trợ/tiếp xúc diện tích lớn của lớp bọc giáp cáp giúp tránh quá áp do phản xạ tần số cao trên cáp động cơ. Cáp động cơ có chiều dài 10 m trở lên giữa động cơ và bộ chuyển đổi làm tăng xác suất quá áp. Schaeffler Industrial Drives khuyến nghị đo điện áp trên các cực đấu nối động cơ bằng công nghệ cao áp phù hợp khi đưa máy vào vận hành.
- Lựa chọn đúng động cơ: Các động cơ phải được lựa chọn theo điện áp mạch một chiều của bộ chuyển đổi. Trong hầu hết các trường hợp, điện áp mạch một chiều là 600 V. Điện áp mạch một chiều thấp hơn làm giảm đáp ứng động học và tốc độ tối đa. Cần có một hệ thống cách điện được tăng cường nếu điện áp mạch một chiều từ 720 V trở lên hoặc độ cao lắp đặt lớn hơn 2000 m. Trong những trường hợp như vậy, hãy liên hệ Schaeffler Industrial Drives. Các động cơ có điện cảm vượt xa 50 mH, đo từ pha đến pha, chỉ được sử dụng sau khi có các kiểm tra riêng của nhà sản xuất bộ chuyển đổi và Schaeffler Industrial Drives, nếu không các xung điện áp có thể gây cộng hưởng trong PDS (hệ truyền động công suất) và hư hại hệ thống cách điện.
Phải tuân thủ các hướng dẫn từ nhà sản xuất bộ chuyển đổi. Nếu bất kỳ điều nào sau đây áp dụng, điều này phải được nêu rõ trong yêu cầu. Ngoài ra, phép đo độ vọt lố quá độ có thể được thực hiện trong quá trình đưa vào vận hành tại hiện trường.
- PDS với các mô-đun bộ chuyển đổi nhiều trục hoặc nguồn cấp được điều chỉnh: ở đây, các dao động điện so với điện thế đất và tải điện áp phát sinh có thể làm hư hại hệ thống cách điện của động cơ.
- Các ứng dụng trong đó hư hại cách điện rõ rệt hơn đã từng xảy ra trong quá khứ
- Các ứng dụng trong đó các biện pháp đối phó đã tồn tại
Đối với điện áp mạch một chiều từ 600 V đến 720 V, độ vọt lố giữa các pha động cơ không được vượt quá 1370 V. Dải đỉnh-đỉnh giữa các pha động cơ không được vượt quá 2800 V.
Các phản xạ trên đường dây và các dao động điện do nguồn cấp được điều chỉnh được chồng lên nhau trong phép đo giữa pha động cơ và điện thế đất. Chỉ nên xem xét dải đỉnh-đỉnh trong quá trình đánh giá. Dải đỉnh-đỉnh không được vượt quá 2350 V.
1.6.6 Đặc tính ngắn mạch ở động cơ đồng bộ nam châm vĩnh cửu
Trong trường hợp khẩn cấp, một sự ngắn mạch các pha U, V và W có thể hãm một trục được dẫn động bởi động cơ mô-men xoắn. Việc hãm khẩn cấp này tạo ra một dòng điện ngắn mạch. Độ lớn và thời gian của tải dòng điện phải được tính đến trong việc định cỡ PDS (hệ truyền động công suất). Nếu dòng điện ngắn mạch cao hơn dòng điện liên tục có làm mát Icw, phải tham vấn Schaeffler Industrial Drives. Đặc tính hãm của động cơ được tính dựa trên tốc độ và mô-men quán tính.
1.7 Làm mát và mạch làm mát
1.7.1 Phân bố nhiệt
Cụm động cơ truyền tổn thất công suất phát sinh trong quá trình vận hành động cơ tới máy. Các biện pháp thiết kế được thực hiện cho làm mát, đối lưu, dẫn nhiệt và bức xạ có thể được dùng để tác động và kiểm soát sự phân bố nhiệt của toàn bộ hệ thống. Việc hiểu rõ các nguồn nhiệt trong một động cơ có tính quyết định đối với thiết kế kết cấu.
Tại tốc độ thấp, và do đó tần số đổi cực < 100 Hz, nhiệt chỉ được tạo ra do tổn thất đồng trong các cuộn dây động cơ. Tại tốc độ cao hơn, và do đó tần số đổi cực > 100 Hz, tổn thất sắt ở rôto và stato cũng như tổn thất nam châm ở rôto cũng xảy ra. Tổn thất sắt không tăng tuyến tính theo tần số đổi cực và phụ thuộc vào góc suy giảm từ trường và mật độ dòng điện.
Phần lớn nhiệt phát sinh khi vận hành tại tần số đổi cực < 100 Hz có thể được tản qua một hệ thống làm mát bằng chất lỏng trên bề mặt ngoài của stato. Hệ thống làm mát kiểu áo gọi là cooling jacket được đấu nối với mạch làm mát của một bộ làm nguội tuần hoàn. Áo làm mát thường là một thành phần kết cấu của thiết kế máy đặc thù theo khách hàng, nhưng cũng có thể được Schaeffler Industrial Drives cung cấp riêng. Môi chất làm mát đi qua các lỗ trong các gân làm mát – gọi là rãnh làm mát uốn khúc – qua các tầng khác nhau từ đầu vào đến đầu ra. Đầu vào và đầu ra có thể được phân cho hai đầu nối tùy ý. Vùng dòng chảy được làm kín ra ngoài bằng các vòng đệm O.
Đối với các máy có mật độ công suất cao, tốc độ cao, và do đó tần số đổi cực > 100 Hz, đáp ứng động học xuất sắc hoặc độ chính xác cao, Schaeffler Industrial Drives còn khuyến nghị sử dụng thêm một hệ thống điều khiển nhiệt độ (gia nhiệt hoặc làm mát) cho kết cấu xung quanh hoặc rôto. Một bộ phân phối quay thường được dùng để làm mát ổ đỡ và rôto. Việc điều khiển nhiệt độ của kết cấu xung quanh giúp giảm thiểu biến dạng nhiệt của kết cấu máy và tác động lên lực dự ứng của ổ đỡ, qua đó làm tăng độ chính xác.
Mô-men xoắn liên tục của động cơ mô-men xoắn có làm mát bằng chất lỏng trên stato cao hơn đến 300 % so với vận hành không làm mát. Để đạt được mô-men xoắn liên tục cao, động cơ mô-men xoắn được vận hành với làm mát bằng chất lỏng trong hầu hết các ứng dụng.
Thiết kế làm mát động cơ chịu ảnh hưởng bởi các yếu tố sau:
- không gian lắp đặt
- yêu cầu độ chính xác
- độ nhạy nhiệt của kết cấu xung quanh
- các tốc độ yêu cầu
1.7.2 Môi chất làm mát và tác động của chúng lên việc làm mát
Thông tin trong dữ liệu hiệu năng dựa trên nước là môi chất làm mát. Tuy nhiên, nước cần các chất phụ gia ngăn ăn mòn và lắng đọng sinh học trong mạch làm mát. Việc sử dụng một môi chất làm mát khác biệt nhiều so với nước sẽ làm giảm lượng nhiệt có thể được tản và do đó cũng làm thay đổi mô-men xoắn liên tục có làm mát Tcw sẵn có trong vận hành liên tục. Theo yêu cầu, Schaeffler Industrial Drives có thể hỗ trợ định cỡ ứng dụng và xác định dữ liệu động cơ có thể đạt được.
Để định cỡ với một môi chất làm mát đặc thù theo khách hàng, cần các thông tin sau:
- loại và khối lượng riêng
- nhiệt dung riêng
- độ nhớt động học
- bảng dữ liệu kỹ thuật với các chất thành phần
Nếu sử dụng các môi chất làm mát có độ nhớt cao hơn đáng kể so với nước, phải kiểm tra tác động lên việc làm mát trước khi sử dụng. Các thông số động cơ như Icw eff hoặc Tcw có thể cần được điều chỉnh. Phải sử dụng dữ liệu cho môi chất được dùng và phải tính đến các nhiệt độ dự kiến.
Nước
Nước là môi chất làm mát được sử dụng phổ biến nhất. Nước có nhiệt dung riêng cao và rẻ tiền. Nước với các chất phụ gia ngăn ăn mòn và lắng đọng sinh học được ưu tiên hơn tất cả các môi chất làm mát khác. Các chất phụ gia như COOL CONCENTRATE hoặc COOL X hầu như không ảnh hưởng đến các tính chất như khối lượng riêng và độ nhớt. Nước với một trong các chất phụ gia này là một môi chất làm mát rất hiệu quả với nhiệt dung riêng 4,1 kJ/kg·K. Giá trị này xấp xỉ tương ứng với giá trị của nước.
Bảng 8: Tính chất vật liệu của nước
| Nhiệt độ | Khối lượng riêng 1) | Nhiệt dung riêng | Độ nhớt động lực | Độ nhớt động học |
|---|---|---|---|---|
| °C | kg/m³ | kJ/kg·K | Pa·s | mm²/s |
| +20 2) | 998,21 | 4,1840 | 0,0010014 | 1,00319572 |
| +25 | 997,05 | 4,1813 | 0,00088982 | 0,892452736 |
| +30 | 995,65 | 4,1798 | 0,00079705 | 0,800532316 |
1) Theo DIN 1306, các điều kiện phụ như áp suất không khí và gia tốc trọng trường áp dụng 1 g, áp suất pn = 1,01325 bar.
2) Nhiệt độ tham chiếu.
Hỗn hợp nước–glycol
Một hỗn hợp nước và glycol có điểm đóng băng thấp hơn so với nước và ngăn ăn mòn. Hỗn hợp này thường được dùng cho môi trường lạnh hoặc các ứng dụng đòi hỏi chống đóng băng. Do độ nhớt cao hơn của hỗn hợp nước–glycol so với nước tinh khiết, có một tổn thất áp suất cao hơn trong hệ thống đường ống. Bơm tuần hoàn phải cung cấp một áp suất cao hơn tương ứng.
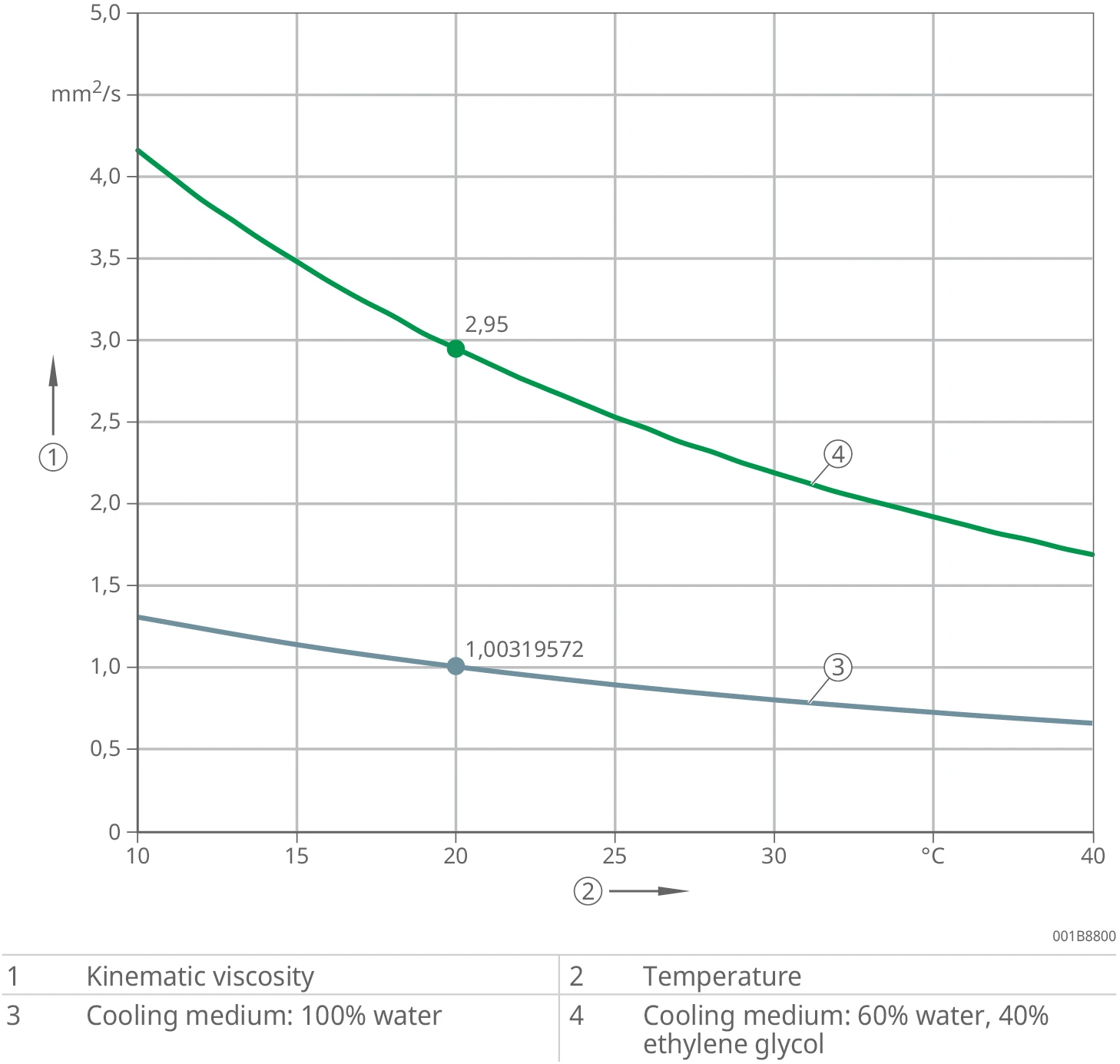
Hình 10: Sự phụ thuộc của độ nhớt động học vào nhiệt độ. Trục đứng là độ nhớt động học (mm²/s), trục ngang là nhiệt độ (°C). Hai đường cong: ③=môi chất làm mát 100% nước (1,00319572 tại 20 °C), ④=môi chất làm mát 60% nước + 40% ethylene glycol (2,95 tại 20 °C). Định nghĩa ký hiệu: ①=độ nhớt động học, ②=nhiệt độ.
Ví dụ
Một hỗn hợp gồm 40 % ethylene glycol, ví dụ Antifrogen N, và 60 % nước có điểm đóng băng −25 °C và độ nhớt động học cao gấp 2,95 lần so với nước. Lưu lượng dòng chảy khuyến nghị chỉ có thể đạt được với một áp suất cao hơn đáng kể. Có thể dùng các hệ số hiệu chỉnh để ước tính sơ bộ.
Bảng 9: Các hệ số hiệu chỉnh cho ethylene glycol
| Nồng độ | Điểm đóng băng | Hệ số hiệu chỉnh cho chênh lệch áp suất |
|---|---|---|
| % | °C | – |
| 20 | −9 | 1,14 |
| 30 | −16 | 1,23 |
| 40 | −25 | 1,33 |
| 44 | −30 | 1,38 |
Phải luôn tuân theo các giá trị chính xác cho môi chất làm mát được sử dụng.
Dầu
Dầu được dùng làm môi chất làm mát trong một số ứng dụng công nghiệp. Ứng dụng quyết định loại dầu nào là phù hợp. Nếu sử dụng dầu, phải luôn đạt được lưu lượng thể tích cần thiết cho việc làm mát. Theo yêu cầu, Schaeffler Industrial Drives có thể hỗ trợ định cỡ. Tính tương thích hóa học của tất cả các thành phần phải được khách hàng kiểm tra.
1.7.3 Ảnh hưởng của dữ liệu danh định lên nhiệt độ cấp và môi chất làm mát
Dòng điện liên tục được nêu cho vận hành có làm mát Icw eff liên quan đến nhiệt độ cấp nước làm mát danh định ϑnf. Dòng điện liên tục Icw eff được nêu trong dữ liệu hiệu năng.
Nhiệt độ cấp cao hơn ϑf làm giảm năng lực làm mát và do đó cũng làm giảm dòng điện liên tục. Dòng điện liên tục đã giảm Ic red được tính từ mối quan hệ bậc hai sau:
Công thức 2: Dòng điện liên tục đã giảm
Ic red / Icw eff = √(ϑmax − ϑf) / (ϑmax − ϑnf)
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Ic red | A | Dòng điện liên tục đã giảm |
| Icw eff | A | Dòng điện liên tục hiệu dụng, có làm mát |
| ϑmax | °C | Nhiệt độ cuộn dây tối đa cho phép |
| ϑnf | °C | Nhiệt độ cấp danh định |
| ϑf | °C | Nhiệt độ cấp hiện tại |
Nếu sử dụng các môi chất làm mát đặc thù theo khách hàng, lượng nhiệt thải có thể được tản và do đó cũng làm thay đổi mô-men xoắn liên tục có làm mát sẵn có trong vận hành liên tục. Theo yêu cầu và với việc nêu rõ các tính chất của chất, các kỹ sư của Schaeffler Industrial Drives có thể xác định tác động của môi chất làm mát được sử dụng.
Hình 11: Dòng điện liên tục tương đối Ic red / Icw eff như một hàm của nhiệt độ cấp ϑf (ϑnf = +20 °C). Trục đứng là dòng điện liên tục tương đối (%), trục ngang là nhiệt độ cấp thực tế ϑf (°C). Đường cong đạt 100% tại +20 °C và giảm khi nhiệt độ tăng. Định nghĩa ký hiệu: ①=dòng điện liên tục tương đối Ic red / Icw eff tính theo %, ②=nhiệt độ cấp thực tế ϑf, Ic red=dòng điện liên tục đã giảm, Icw eff=dòng điện liên tục, có làm mát, ϑnf=nhiệt độ cấp danh định.
1.8 Bố trí động cơ
1.8.1 Vận hành nhiều động cơ song song trên một trục
Việc dẫn động một trục đồng thời bằng 2 hoặc nhiều động cơ đồng bộ là hợp lý trong một số ứng dụng. Các ứng dụng như vậy bao gồm hệ thống xoay trong trung tâm gia công năm trục, đầu phay kiểu càng hoặc trục chính máy cho máy phay lăn răng. Các động cơ đồng bộ được chế tạo giống hệt nhau và đấu song song có thể được vận hành cùng nhau trên một bộ chuyển đổi. Chỉ các tốc độ thấp mới cho phép chất lượng đồng bộ thỏa đáng nếu hai động cơ mô-men xoắn được vận hành song song trên một trục. Do đó, trong thực tế, chỉ các động cơ mô-men xoắn dòng RIB được dùng cho vận hành song song. Các động cơ mô-men xoắn dòng RIB chậm hơn các động cơ mô-men xoắn dòng RKIB.
1.8.2 Bố trí động cơ
Người ta phân biệt giữa bố trí tandem song song và bố trí Janus phản song song, tức là phản chiếu, của các stato.
Căn chỉnh rôto
Trong vận hành song song, các rôto phải được căn chỉnh ở cùng một vị trí góc, bất kể bố trí nào. Các dấu trên rôto tương ứng có thể được dùng để căn chỉnh.
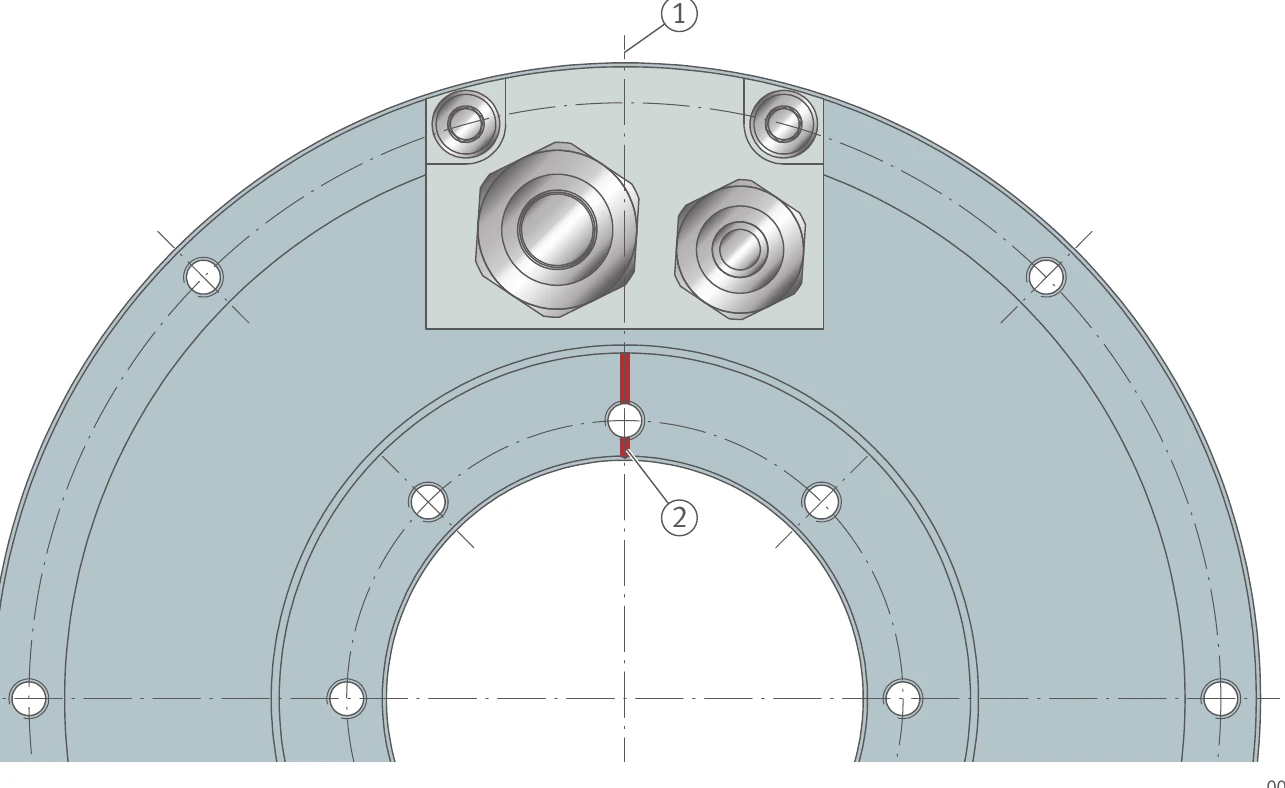
Hình 12: Trục không và các dấu quay khi được căn chỉnh. ①=trục không, ②=dấu trên rôto.
Căn chỉnh stato
Mục tiêu là căn chỉnh các cuộn dây của mỗi pha ở cùng một vị trí góc. Stato có thể được căn chỉnh bằng cách sử dụng trục không. Ở một động cơ RIB tiêu chuẩn với một lối ra cáp đơn, trục không nằm giữa các lỗ trên kẹp cáp. Trong trường hợp lối ra cáp đặc thù theo khách hàng hoặc nhiều lối ra cáp, phải tham vấn Schaeffler Industrial Drives để xác định trục không.
Trước khi có thể lập kế hoạch vận hành song song, phải liên hệ Schaeffler Industrial Drives.
Bố trí tandem
Các lối ra cáp hướng theo cùng một chiều dọc.
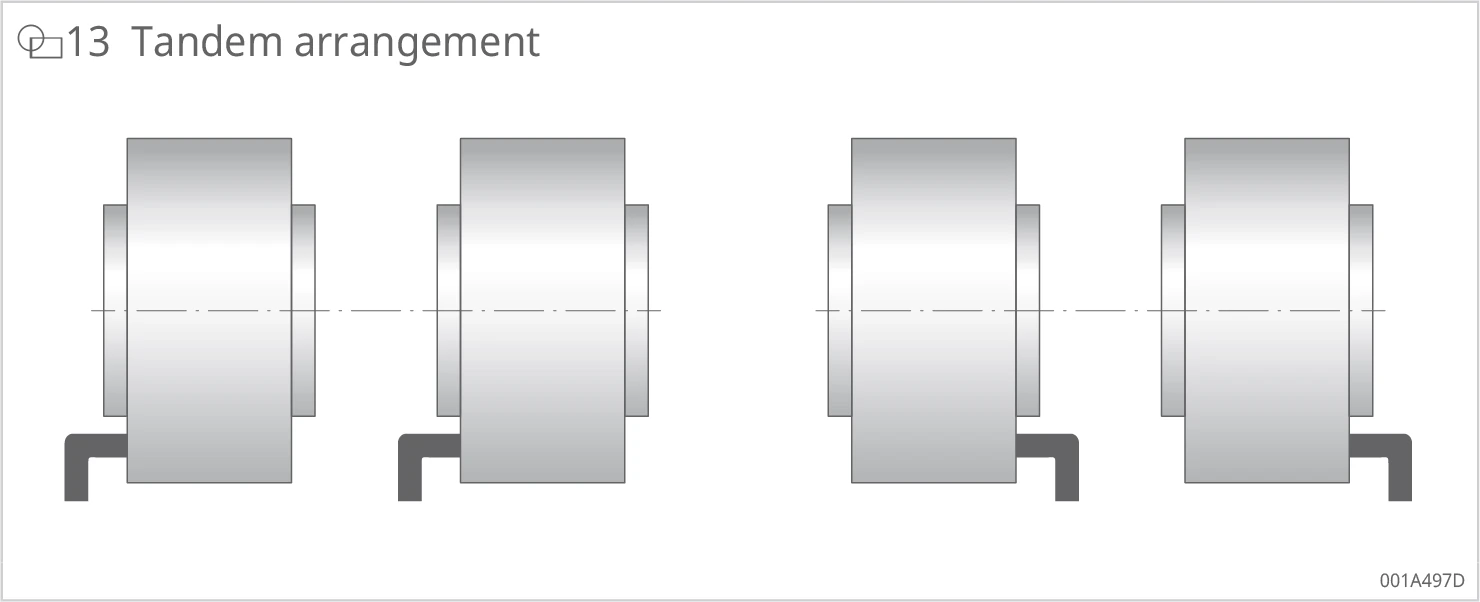
Hình 13: Bố trí tandem. Sơ đồ hai cặp động cơ với các lối ra cáp hướng theo cùng một chiều dọc.
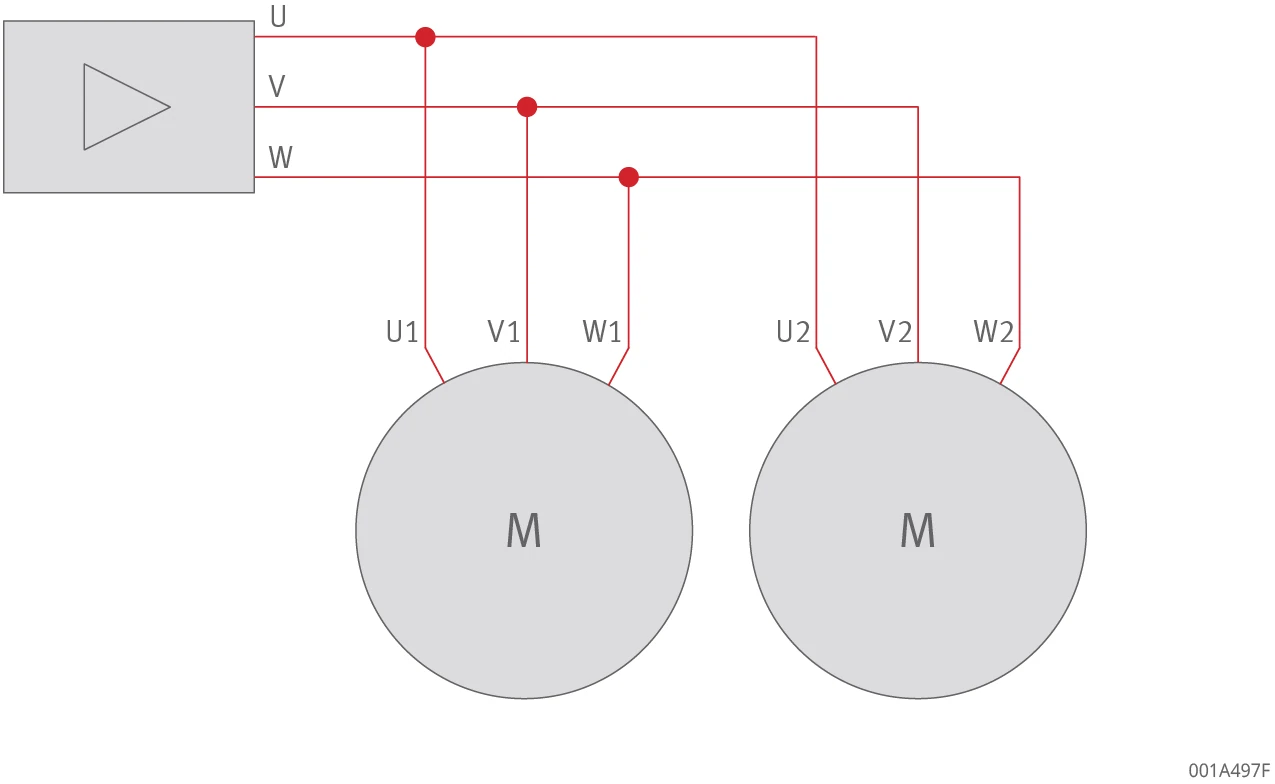
Hình 14: Sơ đồ đấu dây bố trí tandem. Các pha U, V, W của bộ chuyển đổi được đấu lần lượt vào các cực U1/V1/W1 và U2/V2/W2 của hai động cơ M (các pha cùng tên được đấu chung với nhau).
Các trục không của các stato cũng được căn chỉnh với các lối ra cáp. Trong trường hợp các lối ra cáp đồng trục thẳng hàng, các vòng tròn bu-lông phải được bố trí đồng tâm và các đấu nối pha cùng tên phải được xếp thẳng hàng.
Bố trí Janus
Các lối ra cáp hướng theo các chiều dọc ngược nhau.
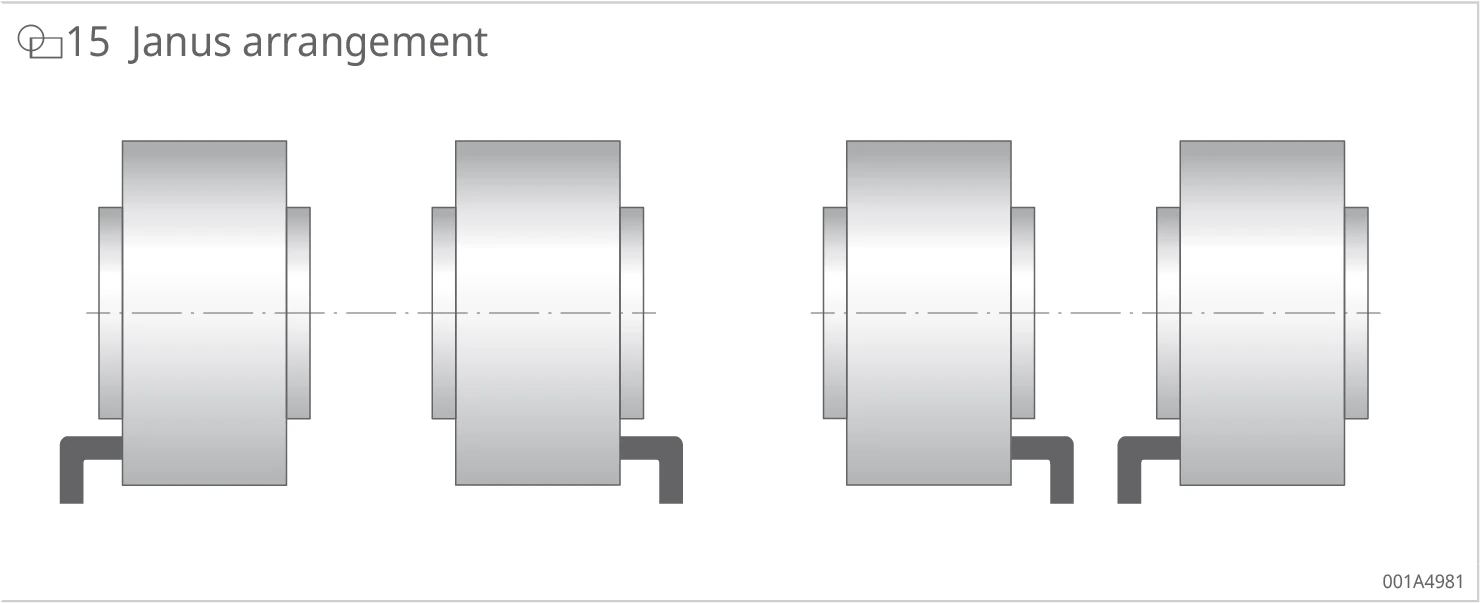
Hình 15: Bố trí Janus. Sơ đồ hai cặp động cơ với các lối ra cáp hướng theo các chiều dọc ngược nhau.
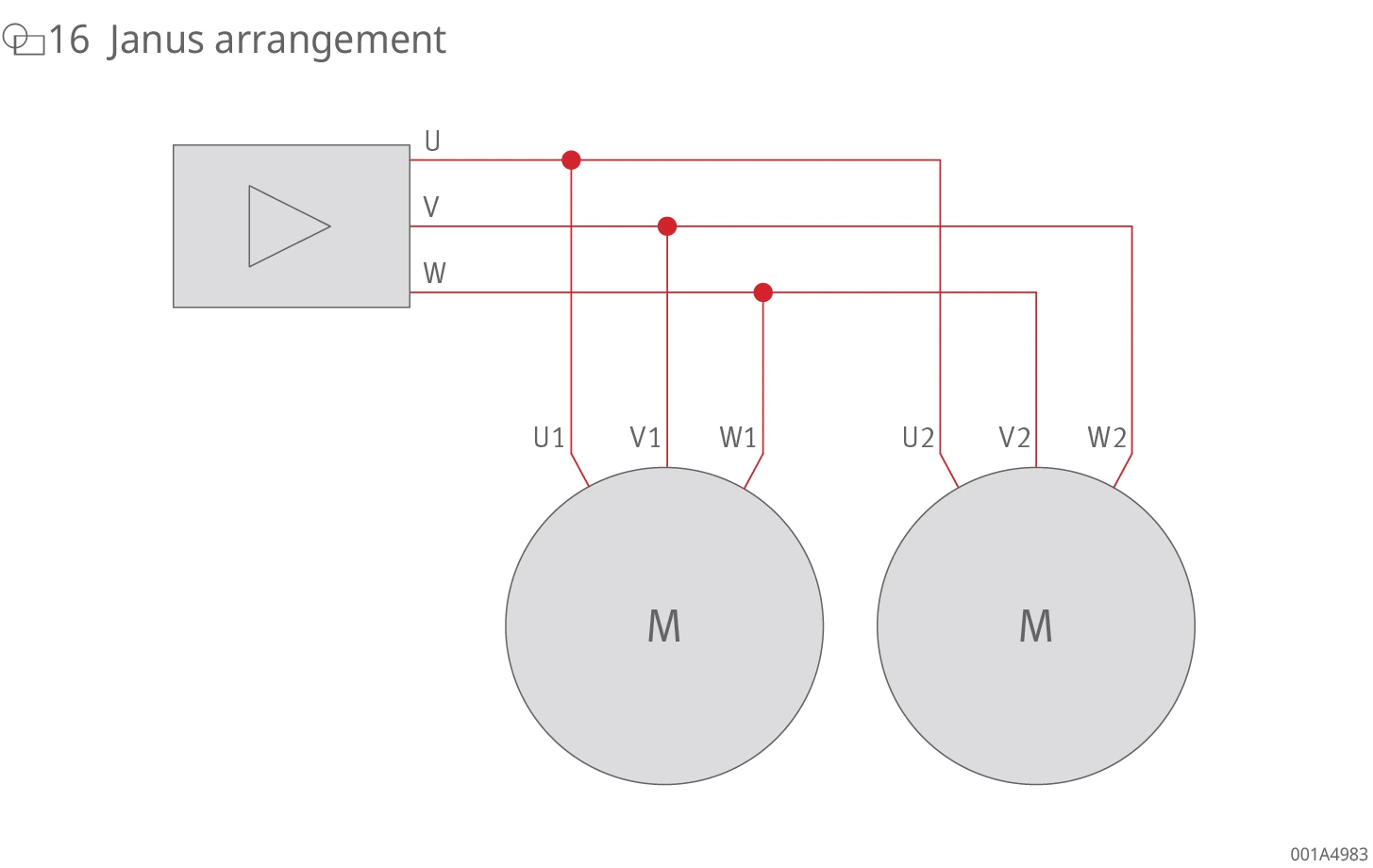
Hình 16: Sơ đồ đấu dây bố trí Janus. Các pha U, V, W của bộ chuyển đổi được đấu vào hai động cơ M, với các pha V và W của một động cơ được hoán đổi để đạt được vận hành phản chiếu.
Các trục không cũng phải khớp nhau trong bố trí Janus phản chiếu. Tùy thuộc vào vị trí của trục không, có thể cần phải dịch các vòng tròn bu-lông. Các động cơ ở bố trí phản chiếu phải làm việc theo chiều quay ngược nhau. Vì mục đích này, các pha V và W được hoán đổi trên một trong hai động cơ. Kết quả là, các pha U1 và U2, V1 và W2 và W1 và V2 được đấu chung với nhau vào bộ chuyển đổi.
1.9 Vận hành nhiều động cơ song song trên một trục
1.9.1 Dịch chuyển lối ra cáp
Trong tất cả các bố trí, các stato và do đó các lối ra cáp có thể được xoay tương đối với nhau theo các bước có kích thước nhất định. Đặc biệt trong bố trí Janus với các lối ra cáp bên trong, có thể thiết kế một trục tổng thể ngắn hơn bằng cách xoay các stato. Kích thước bước tương ứng với một cặp cực và phải được nhân với một hệ số nguyên.
Góc xoắn được tính như sau:
Công thức 3: Góc xoắn
Torsion angle = ( 360° / Number of pole pairs ) · x
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| x | – | hệ số nguyên bất kỳ |
Ở một số dòng động cơ, một góc xoắn thuận lợi cũng có thể đạt được trong vòng tròn bu-lông, ví dụ RIB11-3P-230xH:
Công thức 4: Góc xoắn trong vòng tròn bu-lông
Torsion angle = ( 360° / 22 ) · 11 = 180°
1.9.2 Thiết lập sự trùng pha
Trong mọi trường hợp, cần kiểm tra xem các động cơ song song có được căn chỉnh cùng pha với nhau hay không. Nếu các pha không được căn chỉnh, sẽ có sự suy giảm hằng số mô-men xoắn và hiệu suất liên quan đến tốc độ do các dòng điện ngắn mạch cảm ứng.
Việc căn chỉnh pha được thực hiện thông qua phép đo các sức điện động ngược của các động cơ bằng một dao động ký hai kênh với việc xoay đồng thời các rôto được đấu nối. Để đạt được một chức năng tĩnh tốt của các động cơ được kết nối với nhau, độ lệch pha giữa hai đường cong không được vượt quá ±5°. Việc điều chỉnh cơ học một rôto hoặc stato có thể triệt tiêu một độ lệch pha về điện hiện có giữa các động cơ.
Áp dụng như sau:
Công thức 5: Định lý góc cơ học
Mechanical angle set = Phase offset / Number of pole pairs
Với việc lắp đặt đúng, khe hở trong mối ghép bu-lông vòng tròn bu-lông tương ứng với cấp dung sai trung bình EN 20273 là đủ để tinh chỉnh. Nếu hơn hai động cơ được đấu song song, một động cơ được xác định là động cơ chủ và do đó là điểm tham chiếu để căn chỉnh tất cả các động cơ còn lại.
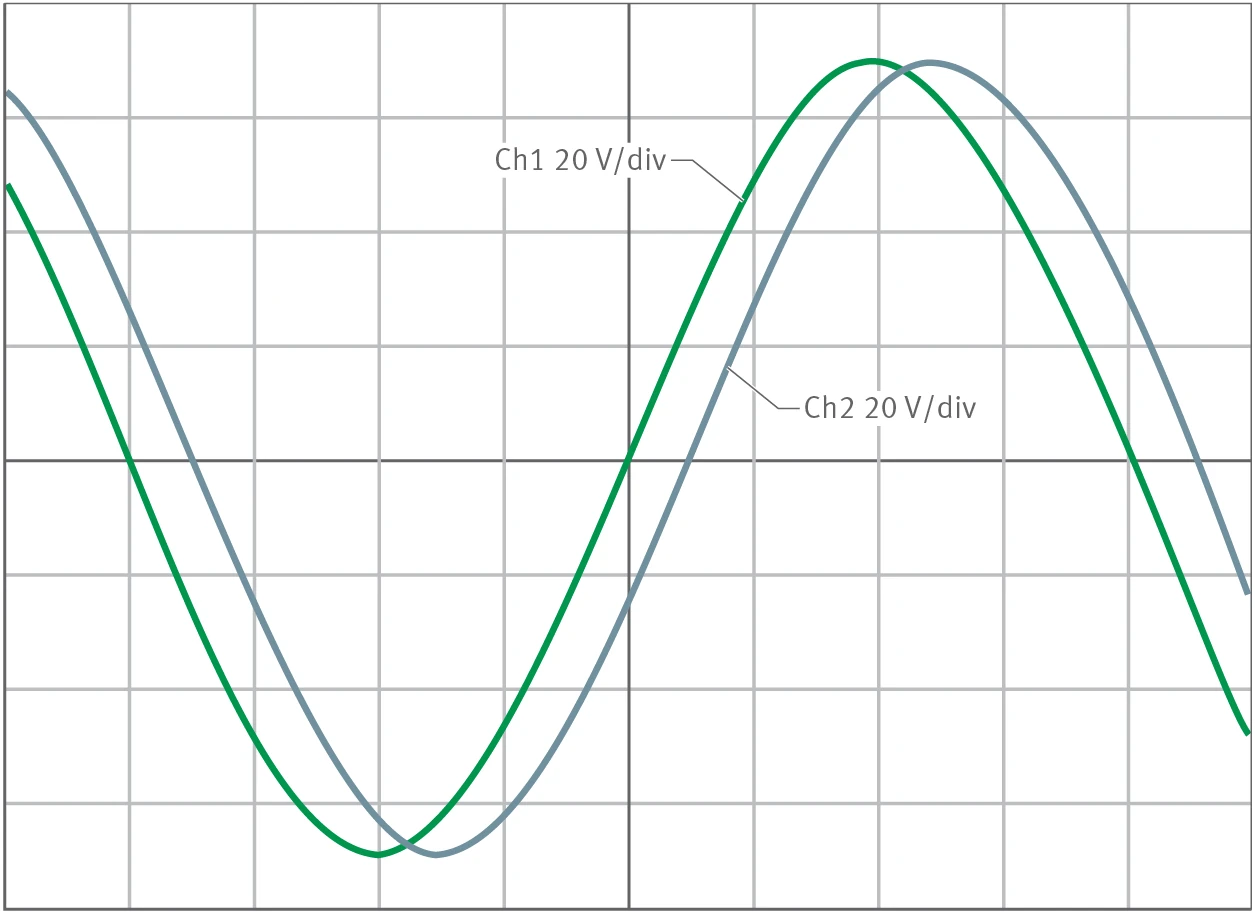
Hình 17: Độ lệch pha 22,5° giữa các sức điện động ngược. Một dao động ký hai kênh thể hiện độ lệch pha giữa hai đường cong sức điện động ngược (Ch1 20 V/div, Ch2 20 V/div).
1.9.3 Đánh giá các cảm biến nhiệt độ
Việc căn chỉnh sai hoặc thiếu chính xác các động cơ với nhau có thể gây quá tải nhiệt cho một động cơ. Các cảm biến PTC tích hợp có tác dụng bảo vệ động cơ. Các cảm biến PTC của mỗi động cơ trong bố trí được đấu nối tiếp và được đánh giá bởi một rơ-le bảo vệ động cơ kiểu điện trở nhiệt.
Để ngăn việc nhả sớm của hệ thống bảo vệ động cơ, Schaeffler Industrial Drives khuyến nghị sử dụng nhiều rơ-le bảo vệ động cơ kiểu điện trở nhiệt hoặc loại nhiều kênh trong trường hợp có ba mạch giám sát PTC trở lên.
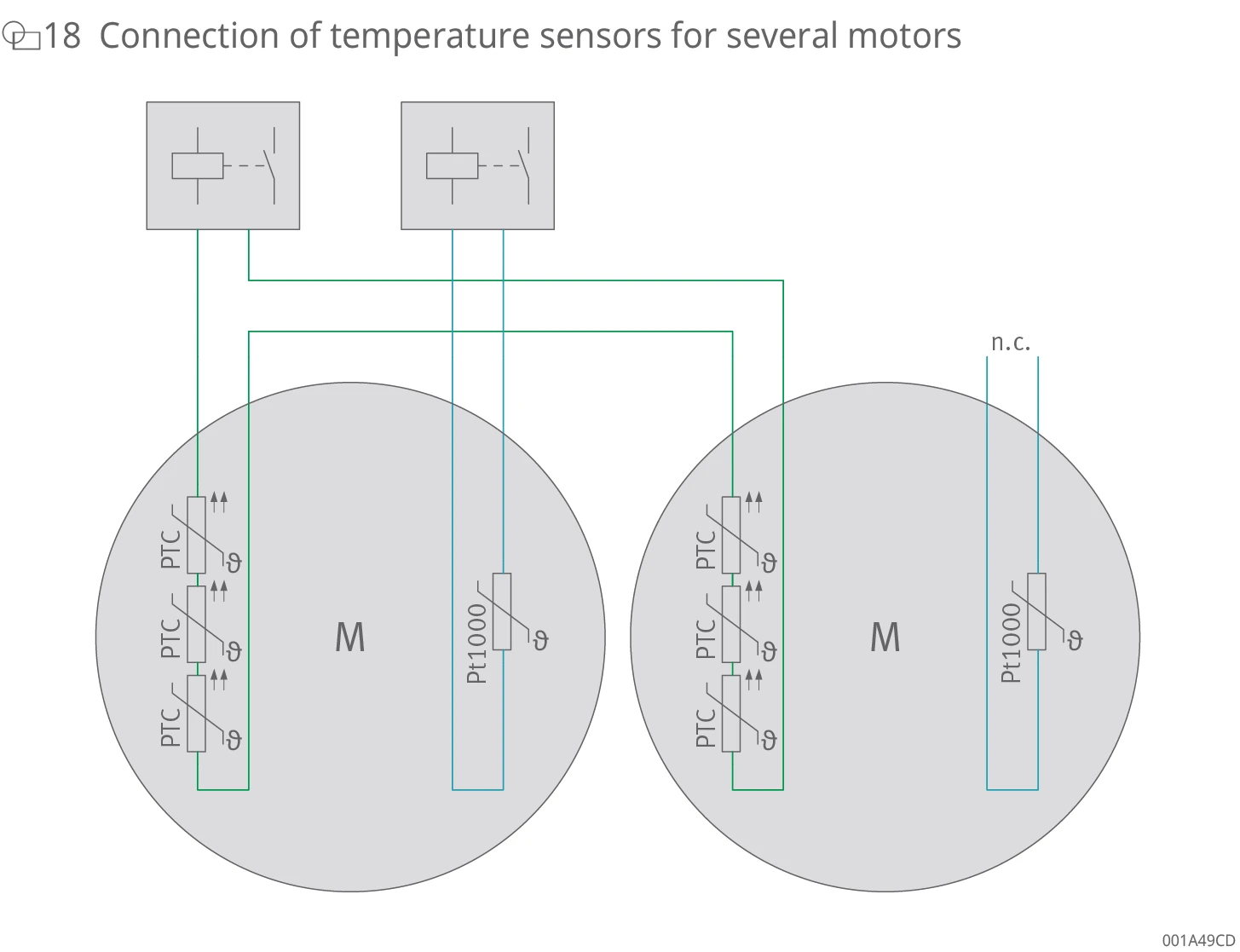
Hình 18: Đấu nối các cảm biến nhiệt độ cho nhiều động cơ. Các PTC (nối tiếp) của hai động cơ M được đấu vào các rơ-le bảo vệ động cơ, mỗi động cơ cũng có một cảm biến Pt1000 (một cảm biến được đánh dấu n.c., không đấu nối).
1.9.4 Dữ liệu động cơ kết quả
Việc đấu song song các động cơ riêng lẻ được chế tạo giống hệt nhau dẫn đến dữ liệu điện mới cho bộ chuyển đổi trên động cơ thay thế hiện tại. Các dữ liệu điện này có thể được xác định dễ dàng từ các dữ liệu sau đây của các động cơ riêng lẻ:
- Số cặp cực, hằng số mô-men xoắn, hằng số điện áp, hằng số thời gian và các tốc độ giữ nguyên không đổi.
- Dòng điện, mô-men xoắn và hằng số giảm chấn nhân với số lượng động cơ riêng lẻ.
- Điện trở và điện cảm được chia cho số lượng động cơ riêng lẻ.
1.10 Lựa chọn bộ truyền động trực tiếp cho các ứng dụng quay
1.10.1 Các ứng dụng theo chu kỳ
Vận hành theo chu kỳ bao gồm các chuyển động định vị liên tiếp với các khoảng nghỉ chuyển động xen giữa. Một thao tác định vị đơn giản có dạng một chuyển động được gia tốc dương và sau đó là hãm. Nếu giá trị gia tốc âm là như nhau, thì thời gian gia tốc và thời gian hãm là như nhau. Vận tốc góc tối đa ωmax đạt được vào cuối một pha gia tốc.
Một chu kỳ được mô tả trong biểu đồ ω-t. Biểu đồ ω-t cho vận hành theo chu kỳ thể hiện một sự quay tới/lui với các khoảng nghỉ.
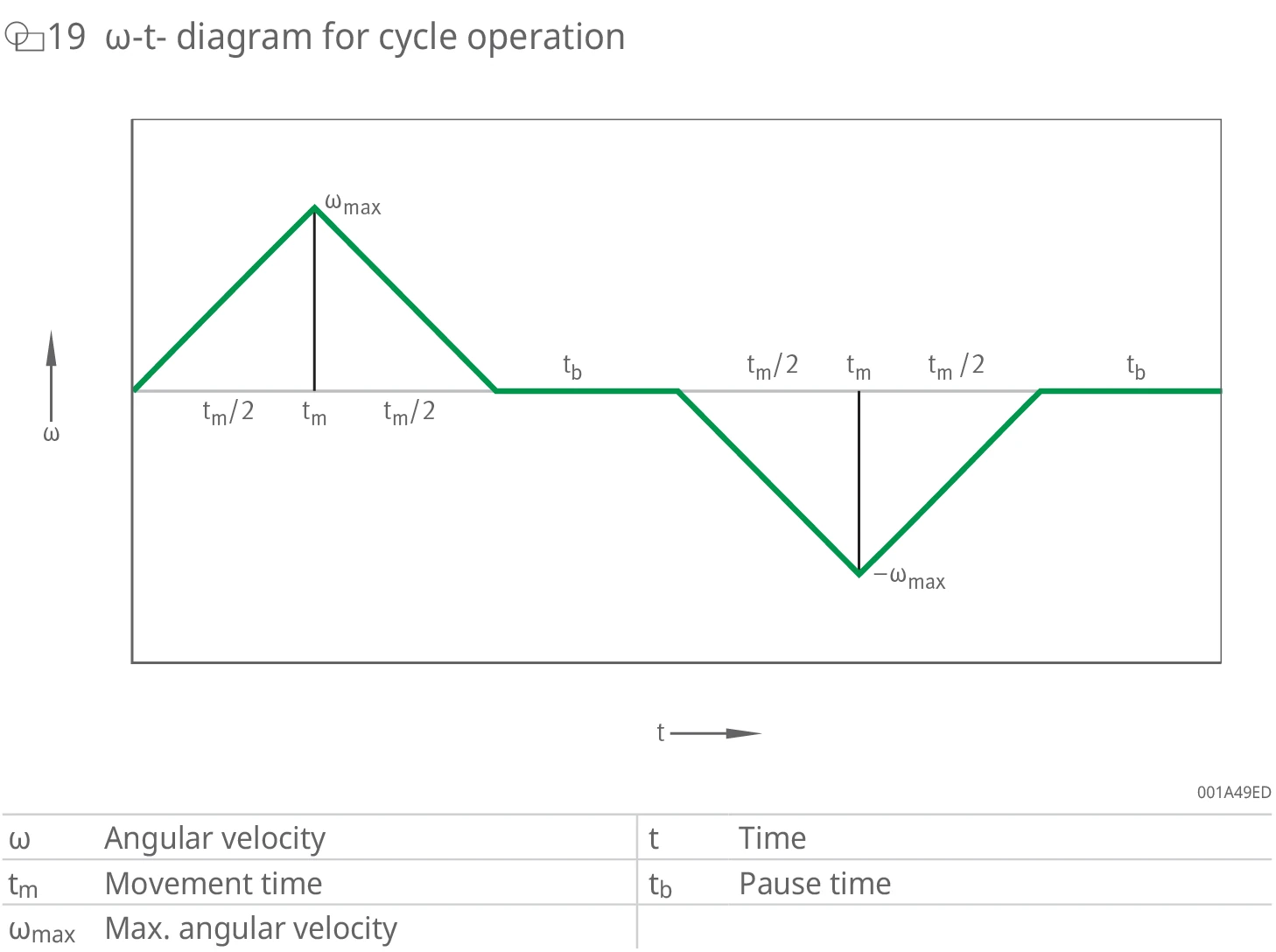
Hình 19: Biểu đồ ω-t cho vận hành theo chu kỳ. Trục đứng là vận tốc góc ω, trục ngang là thời gian t. Nó thể hiện sự quay tới/lui với các khoảng nghỉ, đánh dấu thời gian chuyển động tm, thời gian tạm dừng tb và vận tốc góc tối đa ωmax. Định nghĩa ký hiệu: ω=vận tốc góc, tm=thời gian chuyển động, ωmax=vận tốc góc tối đa, t=thời gian, tb=thời gian tạm dừng.
Biểu đồ α-t cho vận hành theo chu kỳ và đường cong mô-men xoắn cần thiết cho chuyển động được thu được từ sự quay tới/lui với các khoảng nghỉ:
Công thức 6: Mô-men xoắn
T = J · α
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| T | Nm | Mô-men xoắn |
| J | kg·m² | Mô-men quán tính khối lượng |
| α | rad/s² | Gia tốc góc |
Việc lựa chọn động cơ diễn ra dựa trên ba tiêu chí sau đây theo biên dạng mô-men xoắn cho một chu kỳ yêu cầu:
- mô-men xoắn tối đa trong chu kỳ ≤ Tp theo dữ liệu hiệu năng
- mô-men xoắn hiệu dụng trong chu kỳ ≤ Tc (động cơ không làm mát) hoặc Tcw (làm mát bằng nước) theo dữ liệu hiệu năng
- tốc độ tối đa trong chu kỳ ≤ nlp theo dữ liệu hiệu năng
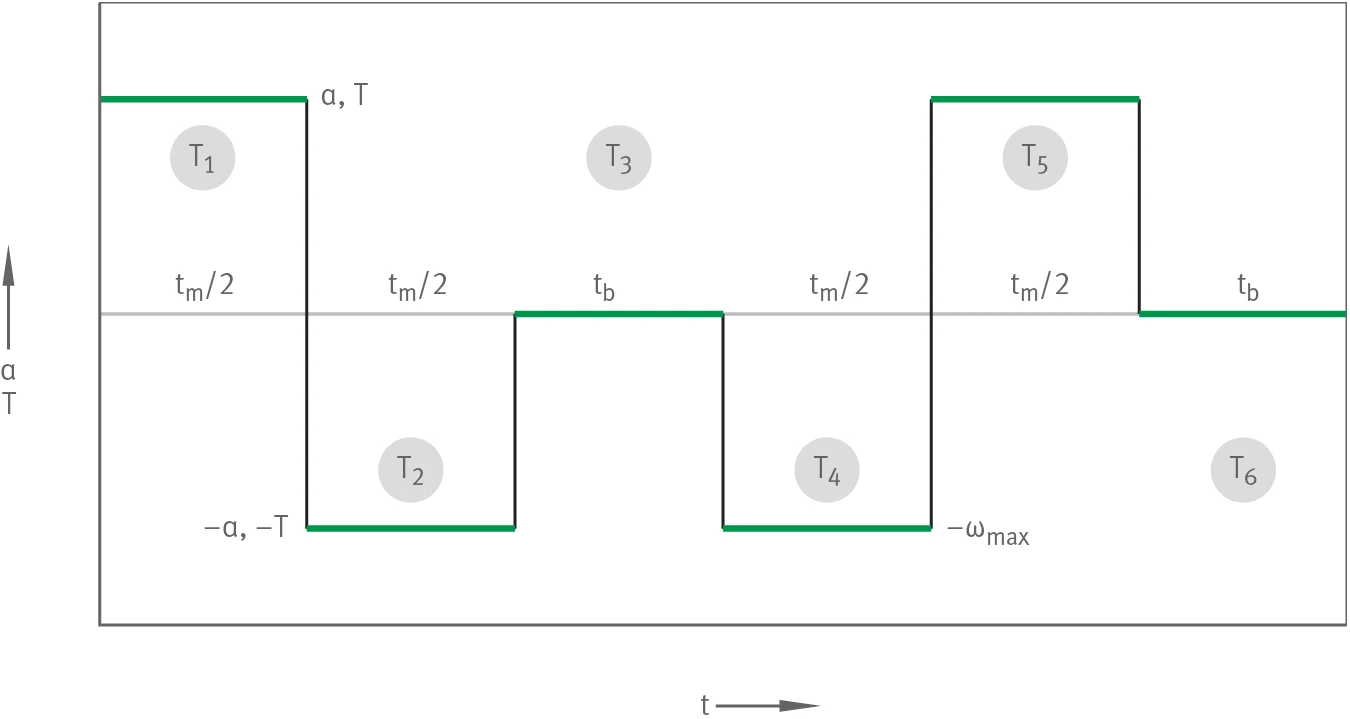
Hình 20: Biểu đồ α-t cho vận hành theo chu kỳ. Trục đứng là gia tốc góc α và mô-men xoắn T, trục ngang là thời gian t. Nó thể hiện sáu bước mô-men xoắn T1–T6. Định nghĩa ký hiệu: α=gia tốc góc, tm=thời gian chuyển động, ωmax=vận tốc góc tối đa, t=thời gian, tb=thời gian nghỉ, T=mô-men xoắn, T1=bước mô-men xoắn 1 (T1=T), T2=bước mô-men xoắn 2 (T2=−T), T3=bước mô-men xoắn 3 (T3=0), T4=bước mô-men xoắn 4 (T4=−T), T5=bước mô-men xoắn 5 (T5=T), T6=bước mô-men xoắn 6 (T6=0).
Mô-men xoắn hiệu dụng bằng căn quân phương của biên dạng mô-men xoắn gồm sáu bước mô-men xoắn trong chu kỳ.
Công thức 7: Mô-men xoắn hiệu dụng
Teff = √(T12·t1 + T22·t2 + … + T62·t6) / (t1 + t2 + … + t6)
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Teff | Nm | Mô-men xoắn hiệu dụng |
| T1 | Nm | Bước mô-men xoắn 1, T1 = T |
| t1 | s | Thời gian chuyển động 1, t1 = tm/2 |
| T2 | Nm | Bước mô-men xoắn 2, T2 = −T |
| t2 | s | Thời gian chuyển động 2, t2 = tm/2 |
| T6 | Nm | Bước mô-men xoắn 6, T6 = 0 |
| t6 | s | Thời gian chuyển động 6, t6 = tb |
Chúng tôi khuyến nghị một hệ số an toàn 1,4 cho các mô-men xoắn. Hệ số an toàn tính đến các điều kiện như động cơ vận hành trong vùng phi tuyến của đường đặc tính mô-men xoắn–dòng điện, mà phương trình tính cho Teff chỉ áp dụng một cách gần đúng.
Mô-men xoắn hiệu dụng có thể được tính với các mô-men xoắn sau:
- T1 = T
- T2 = −T
- T3 = 0
- T4 = −T
- T5 = T
- T6 = 0
Mô-men xoắn hiệu dụng có thể được tính với các thời gian sau:
- t1 = tm/2
- t2 = tm/2
- t3 = tb
- t4 = tm/2
- t5 = tm/2
- t6 = tb
Công thức 8: Mô-men xoắn hiệu dụng
Teff = T · √tm / (tm + tb)
Công thức 9: Mô-men xoắn hiệu dụng
Teff = J · α · √tm / (tm + tb)
Nếu chỉ các mô-men xoắn cùng độ lớn tác động trong chu kỳ, phương trình này áp dụng cho mô-men xoắn hiệu dụng (Công thức 9). Mô-men quán tính khối lượng và các gia tốc góc là không đổi. Thời gian chuyển động chia cho tổng của thời gian chuyển động và thời gian nghỉ nằm dưới căn. Thời gian chu kỳ được đưa vào mẫu số.
Gia tốc góc, vận tốc góc tối đa và tốc độ quay tối đa của một chuyển động định vị có thể được tính với các công thức sau:
Công thức 10: Gia tốc góc
α = (4 · φ) / tm2
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| α | rad/s² | Gia tốc góc |
| φ | ° | Góc chuyển động |
| tm | s | Thời gian chuyển động |
Công thức 11: Vận tốc góc tối đa
ωmax = (2 · φ) / tm
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| tm | s | Thời gian chuyển động |
Công thức 12: Tốc độ tối đa
nmax = (30 / π) · ωmax
Phương pháp tính được trình bày ở đây mang tính lý tưởng hóa và đơn giản hóa. Ví dụ, mức tăng gia tốc góc là vô cùng cao. Trong thực tế, gia tốc góc bị giới hạn bởi điện cảm động cơ hoặc các thành phần khác. Các hệ số an toàn hoặc, trong trường hợp các chuyển động động học cao, các khoảng thời gian bổ sung 15 ms đến 20 ms cho mỗi thao tác định vị được dùng để tính đến các tác động này trong thiết kế.
1.10.2 Ví dụ về các ứng dụng theo chu kỳ
Bảng 10: Các giá trị đã cho
| Các giá trị đã cho | Đơn vị | Giá trị |
|---|---|---|
| Góc chuyển động φ | ° | 180 |
| Thời gian chuyển động tm | s | 0,5 |
| Thời gian chu kỳ tm + tb | s | 1,35 |
| Mô-men quán tính khối lượng J | kg·m² | 2,5 |
| Mô-men ma sát TF | Nm | 8 |
| Hệ số an toàn SF | – | 1,4 |
Tính toán
Chuyển đổi góc chuyển động:
Công thức 13: Chuyển đổi góc chuyển động
φ = (π / 180) · 180 rad = 3,142 rad
Vận tốc góc tối đa:
Công thức 14: Vận tốc góc tối đa
ωmax = (2 · φ) / tm = (2 · 3,142) / 0,5 rad/s = 12,57 rad/s
Tốc độ tối đa:
Công thức 15: Tốc độ tối đa
nmax = (30 / π) · ωmax = (30 / π) · 12,57 1/s = 120 min⁻¹
Gia tốc góc:
Công thức 16: Gia tốc góc
α = (4 · φ) / tm2 = (4 · 3,142) / 0,52 rad/s² = 50,27 rad/s²
Tính đến mô-men ma sát của ổ đỡ TF, mô-men xoắn tối đa thu được như sau:
Công thức 17: Mô-men xoắn tối đa
Tmax = (J · α) + TF = (2,5 · 50,27) + 8 = 133,68 Nm
Mô-men xoắn hiệu dụng, tính đến mô-men ma sát của ổ đỡ TF:
Công thức 18: Mô-men xoắn hiệu dụng, tính đến mô-men ma sát của ổ đỡ
Teff = ( J · α · √tm / (tm + tb) ) + TF = ( 2,5 · 50,27 · √0,5 / 1,35 ) + 8 = 84,48 Nm
Tính đến hệ số an toàn SF, động cơ được lựa chọn theo các yêu cầu sau:
Tsafe max = Tmax × 1,4 ≤ TP
Tsafe eff = Teff × 1,4 ≤ Tcw
nmax ≤ nlp
Một hệ số an toàn cho tốc độ chỉ cần thiết khi sử dụng các bộ biến tần với điện áp mạch một chiều không ổn định. Trong trường hợp hiện tại, một bộ biến tần với điện áp mạch một chiều ổn định UDCL = 600 V được sử dụng. Do đó được phép làm việc mà không cần hệ số an toàn cho tốc độ, và nmax ≤ nlp áp dụng. Nếu nmax > nlp, điểm vận hành Tsafe max tại nmax có thể được kiểm chứng bằng đường đặc tính mô-men xoắn–tốc độ tại điện áp mạch một chiều tương ứng.
Tính toán cho kết quả các yêu cầu động cơ sau:
Không có hệ số an toàn:
- Tp = 133,68 Nm
- Tcw = 84,48 Nm
Có hệ số an toàn:
- Tsafe max = 187,15 Nm
- Tsafe eff = 118,27 Nm
Động cơ RIB17-3P-168x50-Z0.7 (Tp = 233 Nm, Tcw = 123 Nm, nlp = 150 min⁻¹) đáp ứng đầy đủ yêu cầu trong ví dụ tính toán mẫu.
1.10.3 Các ứng dụng bàn xoay NC
Đối với các ứng dụng bàn xoay làm mát bằng nước, tốc độ n, mô-men quán tính J, mô-men xoắn gia công khi chuyển động TW và mô-men xoắn giữ đứng yên Tsw cũng như các gia tốc góc α trong vận hành S1 và αmax trong vận hành S6 thường đã biết. Mặc dù các thời gian hiệu dụng của các mô-men xoắn thay đổi thường xuyên, việc xác định mô-men xoắn hiệu dụng dưới dạng một mô-men xoắn liên tục và mô-men xoắn tối đa một cách chính xác nhất có thể là cần thiết để lựa chọn động cơ tối ưu và để ngăn việc vượt quá nhiệt độ cuộn dây tối đa cho phép.
Tất cả các mô-men xoắn tải xảy ra trong quá trình vận hành động cơ được đưa vào phép tính mô-men xoắn.
1.10.4 Ví dụ về các ứng dụng bàn xoay NC
Bảng 11: Các giá trị đã cho
| Các giá trị đã cho | Đơn vị | Giá trị |
|---|---|---|
| Tốc độ n | min⁻¹ | 60 |
| Mô-men quán tính khối lượng J | kg·m² | 4 |
| Mô-men xoắn gia công TW | Nm | 300 |
| Mô-men ma sát TF | Nm | 50 |
| Lực trọng lượng (mô-men xoắn bổ sung) TZ | Nm | 0 |
| Gia tốc góc trong chế độ S1 αS1 | °/s² | 9000 |
| Gia tốc góc tối đa trong vận hành S6 trong 3 s αmax | °/s² | 20000 |
| Hệ số an toàn SF | – | 1,4 |
Tính toán
Chuyển đổi gia tốc góc sang rad/s²:
Công thức 19: Gia tốc góc
αS1 = (π / 180) · αS1 [°/s²] = (π / 180) · 9000 = 157 rad/s²
Công thức 20: Gia tốc góc tối đa
αmax = (π / 180) · αmax [°/s²] = (π / 180) · 20000 = 349 rad/s²
Việc lựa chọn động cơ dựa trên mô-men xoắn giữ đứng yên có làm mát Tsw và trên các mô-men xoắn khi chuyển động cho vận hành S1, Tcw, và vận hành S6, Tp. Hệ số an toàn SF 1,4 bảo đảm rằng vị trí có thể được duy trì một cách đáng tin cậy và hệ thống điều khiển phản ứng an toàn với các sai lệch.
Công thức 21: Mô-men xoắn giữ đứng yên có làm mát, với làm mát bằng nước
Tsw = ( TW + TF + TZ ) · 1,4 = 490 N
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Tsw | Nm | Mô-men xoắn giữ đứng yên, có làm mát |
| TW | Nm | Mô-men xoắn gia công |
| TF | Nm | Mô-men ma sát của ổ đỡ |
| TZ | Nm | Lực trọng lượng (mô-men xoắn bổ sung) |
Công thức 22: Mô-men xoắn liên tục có làm mát, với làm mát bằng nước
Tcw = ( J · αS1 + TW + TF + TZ ) · 1,4 = 1369 N
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Tcw | Nm | Mô-men xoắn liên tục, có làm mát |
| J | kg·m² | Mô-men quán tính khối lượng |
| αS1 | rad/s² | Gia tốc góc trong vận hành S1 |
| TW | Nm | Mô-men xoắn gia công |
| TF | Nm | Mô-men ma sát của ổ đỡ |
| TZ | Nm | Lực trọng lượng (mô-men xoắn bổ sung) |
Công thức 23: Mô-men xoắn đỉnh
Tp = ( J · αmax + TW + TF + TZ ) · 1,4 = 2444 N
| Ký hiệu | Đơn vị | Mô tả |
|---|---|---|
| Tp | Nm | Mô-men xoắn đỉnh |
| J | kg·m² | Mô-men quán tính khối lượng |
| αmax | rad/s² | Gia tốc góc tối đa |
| TW | Nm | Mô-men xoắn gia công |
| TF | Nm | Mô-men ma sát của ổ đỡ |
| TZ | Nm | Lực trọng lượng (mô-men xoắn bổ sung) |
Tính toán cho kết quả các yêu cầu sau:
- Tp = 2444 Nm
- Tcw = 1369 Nm
Động cơ RIB13-3P-690×50-Z4.2 (Tp = 3627 Nm, Tcw = 2166 Nm, nlp = 61 min⁻¹) đáp ứng đầy đủ các yêu cầu trong ví dụ tính toán mẫu.
Điều khiển tốc độ được sử dụng trong ví dụ này. Bàn xoay NC trước tiên nên khởi động ở một tốc độ xác định. Bàn xoay NC sau đó gia công phôi ở tốc độ này.
Nếu cần thêm một thao tác định vị, như trong trường hợp các bộ đảo chiều gọi là reverser trong điều khiển vị trí, tốc độ yêu cầu tại TP phải được tăng thêm một hệ số an toàn từ 10 % đến 20 %. Khi đó tốc độ giới hạn nlp của động cơ phải lớn hơn tốc độ đã tính cùng với giá trị bổ sung.
Lưu ý: Các giá trị, công thức và ví dụ liệt kê trong chương này đều được lấy từ chương nguyên lý kỹ thuật của tài liệu kỹ thuật Schaeffler RE 1. Dữ liệu ràng buộc được cung cấp trong bản vẽ báo giá và bản vẽ giao hàng. Có thể thay đổi mà không cần thông báo trước.