1.1 คำอธิบายสัญลักษณ์ที่ใช้ในสูตร
หมายเหตุ
ตารางด้านล่างแสดงสัญลักษณ์ หน่วย และคำอธิบายทั้งหมดที่ใช้ในสูตรและไดอะแกรมของบทนี้ รวมทั้งสิ้น 58 รายการ
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| I | A | กระแสของมอเตอร์ |
| Ic eff | A | กระแสต่อเนื่องยังผล แบบไม่ระบายความร้อน |
| Ic red | A | กระแสต่อเนื่องที่ลดลง |
| Icw eff | A | กระแสต่อเนื่องยังผล แบบระบายความร้อน |
| Icw2 eff | A | กระแสต่อเนื่องยังผลสำหรับความเร็วที่สูงขึ้นในการทำงานต่อเนื่อง |
| Ip eff | A | กระแสพีคยังผล |
| Ipl eff | A | กระแสพีคยังผล ช่วงเชิงเส้น |
| Iu eff | A | กระแสสูงสุดยังผล |
| J | kg·m² | โมเมนต์ความเฉื่อยเชิงมวล |
| km | Nm/√W | ค่าคงที่ของมอเตอร์สำหรับมอเตอร์แรงบิด |
| kT | Nm/A | ค่าคงที่แรงบิด |
| n | min⁻¹ | ความเร็วรอบ |
| nlc | min⁻¹ | ความเร็วจำกัดที่ Ic eff และ UDCL |
| nlp | min⁻¹ | ความเร็วจำกัดที่ Ip eff และ UDCL |
| nlw | min⁻¹ | ความเร็วหัวเข่า (knee speed) |
| nlw2 | min⁻¹ | ความเร็วทำงาน FS ที่ Icw2 eff และ UDCL |
| nlw3 | min⁻¹ | ความเร็วจำกัดที่ Icw2 eff และ UDCL ในการทำงานต่อเนื่อง |
| nlwS1 | min⁻¹ | ความเร็วพิกัด S1 แบบระบายความร้อน |
| nmax | min⁻¹ | ความเร็วสูงสุด |
| Pl | W | กำลังสูญเสีย |
| Pmax S1 | N | กำลังพิกัดสูงสุด |
| R | Ω | ความต้านทานโอห์ม |
| t | s | เวลา |
| T | Nm | แรงบิด |
| tb | s | เวลาหยุดพัก |
| Tc | Nm | แรงบิดต่อเนื่อง แบบไม่ระบายความร้อน |
| Tcw | Nm | แรงบิดต่อเนื่อง แบบระบายความร้อน |
| Tcw2 | Nm | แรงบิดที่ Icw2 eff และ nlw2 |
| Tcw3 | Nm | แรงบิดที่ Icw2 eff และ nlw3 |
| Teff | Nm | แรงบิดยังผล |
| TF | Nm | แรงบิดเสียดทานของตลับลูกปืน |
| tm | s | เวลาการเคลื่อนที่ |
| Tmax | Nm | แรงบิดสูงสุด |
| Tp | Nm | แรงบิดพีค |
| Tpl | Nm | แรงบิดพีค ช่วงเชิงเส้น |
| Tsafe eff | Nm | แรงบิดยังผล รวมตัวประกอบความปลอดภัย |
| Tsafe max | Nm | แรงบิดสูงสุด รวมตัวประกอบความปลอดภัย |
| Tsw | Nm | แรงบิดหยุดนิ่ง แบบระบายความร้อน |
| Tu | Nm | แรงบิดสูงสุด (ultimate torque) |
| TW | Nm | แรงบิดในการประมวลผล |
| TZ | Nm | แรงน้ำหนัก (แรงบิดเพิ่มเติม) |
| UDCL | V | แรงดันบัส DC |
| α | rad/s² | ความเร่งเชิงมุม |
| αmax | rad/s² | ความเร่งเชิงมุมสูงสุด |
| αS1 | rad/s² | ความเร่งเชิงมุมในการทำงานแบบ S1 |
| ϑ | °C | อุณหภูมิ |
| ϑf | °C | อุณหภูมิจ่ายปัจจุบัน |
| ϑmax | °C | อุณหภูมิขดลวดสูงสุดที่ยอมให้ได้ |
| ϑn | °C | อุณหภูมิตอบสนองพิกัด |
| ϑnf | °C | อุณหภูมิจ่ายพิกัด |
| φ | ° | มุมการเคลื่อนที่ |
| ω | rad/s | ความเร็วเชิงมุม |
| ωmax | rad/s | ความเร็วเชิงมุมสูงสุด |
1.2 ข้อดีของมอเตอร์แรงบิด
1.2.1 ความสามารถด้านสมรรถนะ
ไม่มีการแปลงรูปแบบการเคลื่อนที่
ไม่มีความยืดหยุ่น ช่องว่าง การเสียดทาน หรือฮิสเทอรีซิสในชุดส่งกำลังที่เกิดจากชิ้นส่วนส่งกำลังหรือชิ้นส่วนข้อต่อ
มอเตอร์หลายขั้ว
แรงบิดที่สูงมากเกิดขึ้นจากการออกแบบแบบหลายขั้ว แรงบิดสามารถใช้งานได้ตั้งแต่ความเร็วรอบ > 0 จนถึงความเร็วพิกัด
โรเตอร์รูปวงแหวนแบบบาง
การออกแบบรูปวงแหวนแบบบางที่มีเส้นผ่านศูนย์กลางภายในขนาดใหญ่และว่างเปล่า ช่วยลดความเฉื่อยของมอเตอร์และให้อัตราเร่งที่สูง
การวัดตำแหน่งโดยตรง
การปรับตำแหน่งที่มีความแม่นยำสูงและเป็นพลวัตเป็นไปได้ ด้วยการวัดตำแหน่งโดยตรงและโครงสร้างเชิงกลที่มีความแข็งแกร่ง
ความเข้ากันได้กับชุดควบคุม
มอเตอร์แรงบิดจาก Schaeffler Industrial Drives สามารถใช้งานร่วมกับเซอร์โวไดรฟ์ทั่วไปทุกตัวในตลาดได้
1.2.2 ต้นทุนการดำเนินงาน
ไม่มีชิ้นส่วนเคลื่อนที่เพิ่มเติม
การไม่มีชิ้นส่วนเคลื่อนที่เพิ่มเติม ทำให้การประกอบ การปรับตั้ง และการบำรุงรักษาเชิงป้องกันของชุดขับเคลื่อนง่ายขึ้น
การสึกหรอน้อยที่สุดในชุดส่งกำลัง
ชุดส่งกำลังมีความทนทานอย่างยิ่งแม้ภายใต้ภาระสลับที่สูงมาก การสึกหรอที่น้อยช่วยลดเวลาหยุดเครื่อง
ความพร้อมใช้งานสูง
นอกเหนือจากอายุการใช้งานที่เพิ่มขึ้นและการสึกหรอที่ลดลง การออกแบบที่แข็งแรงทนทานของมอเตอร์แรงบิดยังเพิ่มความพร้อมใช้งานของทั้งเครื่องจักรอีกด้วย
ประสิทธิภาพพลังงาน
ความร้อนถูกลดลงให้น้อยที่สุดเพื่อประหยัดพลังงานในเซอร์โวไดรฟ์และชุดทำความเย็น
1.2.3 การออกแบบ
เพลากลวง
เพลากลวงที่มีเส้นผ่านศูนย์กลางขนาดใหญ่ ช่วยให้สามารถบูรณาการหรือสอดผ่านชุดประกอบอื่น ๆ ได้ เช่น เพลา ตัวกระจายแบบหมุน และท่อสื่อกลาง ระดับตลับลูกปืน การสร้างแรง และพื้นที่ทำงานที่มีประสิทธิภาพสามารถอยู่ใกล้ชิดกันได้
การติดตั้งสเตเตอร์
วงแหวนสำหรับสเตเตอร์สามารถบูรณาการเข้ากับโครงสร้างเครื่องจักรได้ง่าย เนื่องจากต้องการพื้นที่น้อย
ความสูงหน้าตัดต่ำ
โครงสร้างที่กะทัดรัดสูงและสั้นในแนวแกนพร้อมแรงบิดสูง เป็นไปได้ด้วยเส้นผ่านศูนย์กลางภายในขนาดใหญ่ที่ว่างเปล่า
ชิ้นส่วนน้อย
การออกแบบเชิงวิศวกรรมขั้นสูง ทำให้นำชิ้นส่วนของมอเตอร์มาประกอบเข้ากับเครื่องจักรได้ง่ายขึ้น จำนวนชิ้นส่วนที่น้อยและการออกแบบที่แข็งแรงทนทาน ช่วยลดอัตราการชำรุดและเพิ่มระยะเวลาเฉลี่ยระหว่างการชำรุด
1.3 คุณลักษณะของมอเตอร์แรงบิด
มอเตอร์แรงบิดประกอบด้วยสเตเตอร์และโรเตอร์ สเตเตอร์มีระบบขดลวดที่ทำงานอยู่ ส่วนโรเตอร์มีระบบแม่เหล็กถาวร ในการจัดวางแบบร่วมศูนย์ โรเตอร์อาจเป็นวงแหวนภายในในกรณีของมอเตอร์โรเตอร์ภายใน หรือเป็นวงแหวนภายนอกในกรณีของมอเตอร์โรเตอร์ภายนอก เมื่อสเตเตอร์ได้รับการจ่ายไฟจะสร้างแรงที่กระทำต่อโรเตอร์อันเป็นผลจากแรงแม่เหล็กไฟฟ้า
ตลับลูกปืนทำหน้าที่รักษาช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์ และยังต้องมีระบบวัดเพื่อตรวจจับตำแหน่งของโรเตอร์ด้วย เนื่องจากความต้องการการใช้งานที่หลากหลาย จึงได้มีการพัฒนามอเตอร์หลายซีรีส์ที่มีสเตเตอร์และโรเตอร์หลายรูปแบบ
ในด้านการออกแบบโครงสร้าง มอเตอร์แรงบิดสามารถแบ่งออกได้เป็นมอเตอร์ที่มีหรือไม่มีแกนเหล็กอัดแผ่น (lamination stack) หรือมอเตอร์ไร้แกนเหล็ก ความแตกต่างเพิ่มเติมยังรวมถึงตำแหน่งและการจัดวางของโรเตอร์ว่าเป็นโรเตอร์ภายในหรือโรเตอร์ภายนอก หรือจำแนกตามระบบแม่เหล็ก ตัวอย่างเช่น แม่เหล็กอาจถูกติดบนพื้นผิวของวงแหวนเหล็ก เช่นเดียวกับในซีรีส์ RIB หรืออาจถูกฝังไว้ในแกนเหล็กอัดแผ่น — ที่เรียกว่าแม่เหล็กฝัง (buried magnets) — ในซีรีส์ RKIB มอเตอร์เหล่านี้สร้างแรงบิดที่สูงอย่างสม่ำเสมอตลอดช่วงความเร็วที่กว้าง แรงบิดถูกกำหนดโดยพื้นที่ช่องว่างอากาศที่ทำงานระหว่างสเตเตอร์และโรเตอร์ ตลอดจนโครงสร้าง ผู้ออกแบบต้องเลือกชุดประกอบมอเตอร์ตามความต้องการกำลัง มอเตอร์ไฟฟ้าทั่วไปจำแนกตามกำลัง ในทางตรงกันข้าม มอเตอร์แรงบิดจำแนกตามแรงบิดที่ต้องการ
ตารางที่ 1: คุณลักษณะของมอเตอร์แรงบิด
| ซีรีส์มอเตอร์ | คุณลักษณะ |
|---|---|
| RIB |
มอเตอร์โรเตอร์ภายในที่มีความหนาแน่นแรงบิดสูง
|
| RKI และ RKIB |
มอเตอร์โรเตอร์ภายในที่มีความหนาแน่นกำลังสูง
|
1.4 ค่าคุณลักษณะทั่วไปของมอเตอร์
1.4.1 เกณฑ์ประสิทธิภาพ
กำลังสูญเสียของมอเตอร์แรงบิดถูกระบุไว้ในข้อมูลสมรรถนะตามขดลวดและขนาด แม้ว่ามอเตอร์แรงบิดจะสร้างแรงบิดสูงเมื่ออยู่นิ่ง แต่ก็ไม่ได้ส่งกำลังเชิงกลออกมา ด้วยเหตุนี้จึงไม่มีเหตุผลที่จะระบุค่าประสิทธิภาพ
อย่างไรก็ตาม สามารถใช้ค่าคงที่ของมอเตอร์ km สำหรับการเปรียบเทียบประสิทธิภาพได้ ค่าคงที่ของมอเตอร์ km นิยามความสัมพันธ์ระหว่างแรงบิดกับการสูญเสียในทองแดงที่เกิดขึ้นที่แรงบิดนั้น กำลังสูญเสียทำให้มอเตอร์ร้อนขึ้น นอกจากนี้ ค่าคงที่ของมอเตอร์ km มีความแม่นยำสำหรับช่วงควบคุมเชิงเส้นในสภาวะนิ่งและที่ความเร็วต่ำ ตลอดจนที่อุณหภูมิห้อง
เมื่อมอเตอร์มีอุณหภูมิเพิ่มขึ้น ประสิทธิภาพจะลดลงเนื่องจากความต้านทานของขดลวดที่เพิ่มขึ้น สำหรับความเร็วที่ความถี่การเปลี่ยนขั้ว 100 Hz หรือสูงกว่า การสูญเสียในทองแดงจะมีการสูญเสียในเหล็กเข้ามาร่วมด้วย ในรูปของการสูญเสียฮิสเทอรีซิสและการสูญเสียกระแสไหลวนที่ขึ้นกับความถี่ แม้ว่าการสูญเสียในเหล็กจะไม่รวมอยู่ในค่าคงที่ของมอเตอร์ km แต่ก็มีความสำคัญในช่วงความเร็วจำกัด จึงควรนำมาพิจารณา ค่าคงที่ของมอเตอร์ km เกี่ยวข้องเฉพาะกับช่วงเชิงเส้นของเส้นโค้งคุณลักษณะแรงบิด–กระแสเท่านั้น
สูตรที่ 1: กำลังสูญเสีย
Pl = ( T / km )2
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Pl | W | กำลังสูญเสีย |
| T | Nm | แรงบิด |
| km | Nm/√W | ค่าคงที่ของมอเตอร์ |
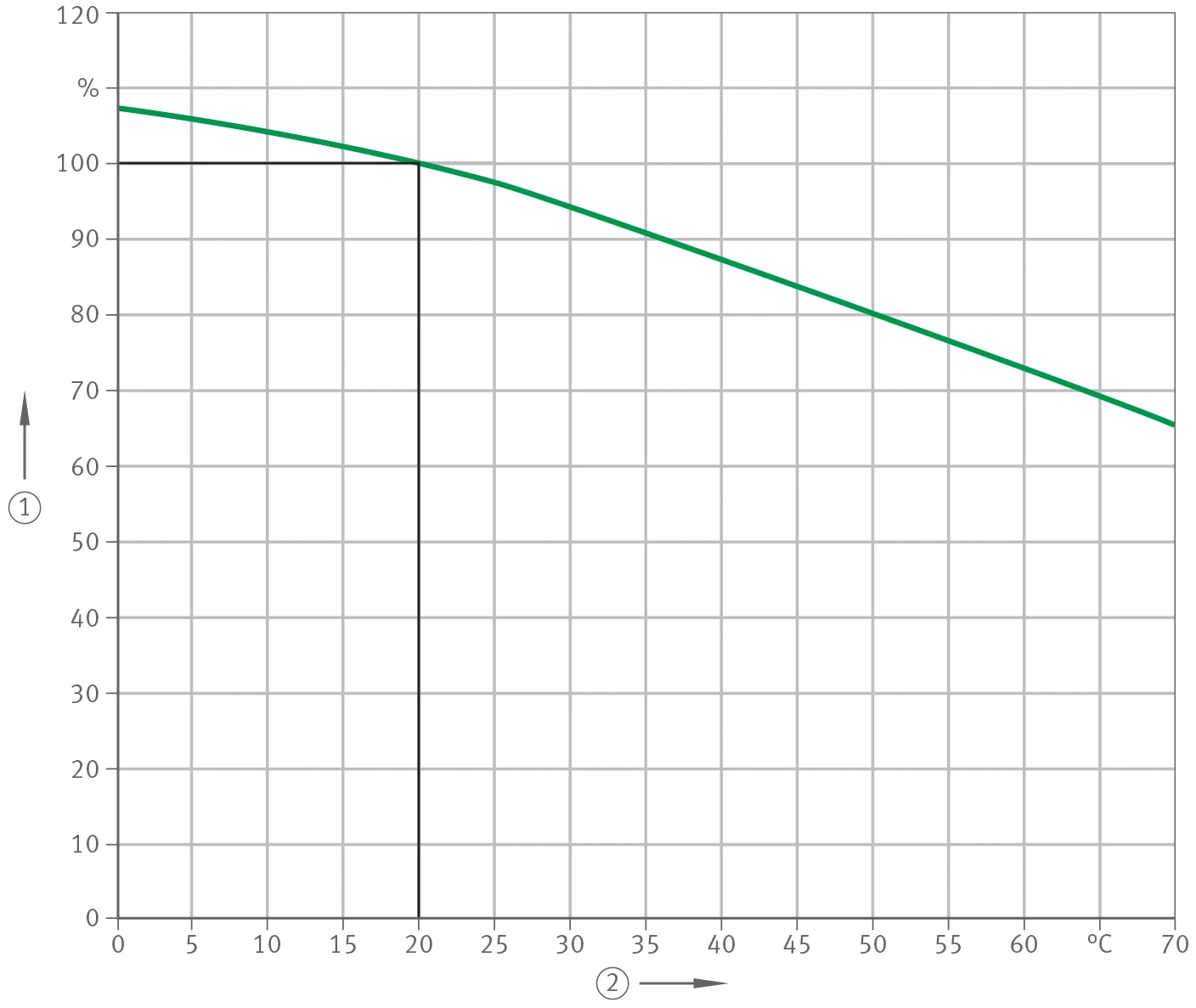
ค่าคงที่ของมอเตอร์ km ขึ้นอยู่กับความต้านทานโอห์ม และจึงขึ้นกับอุณหภูมิขดลวดของมอเตอร์ ค่าคงที่ของมอเตอร์ km ระบุไว้ในข้อมูลสมรรถนะที่ +20 °C เส้นโค้งคุณลักษณะแสดงค่าคงที่ของมอเตอร์เป็นฟังก์ชันของอุณหภูมิ
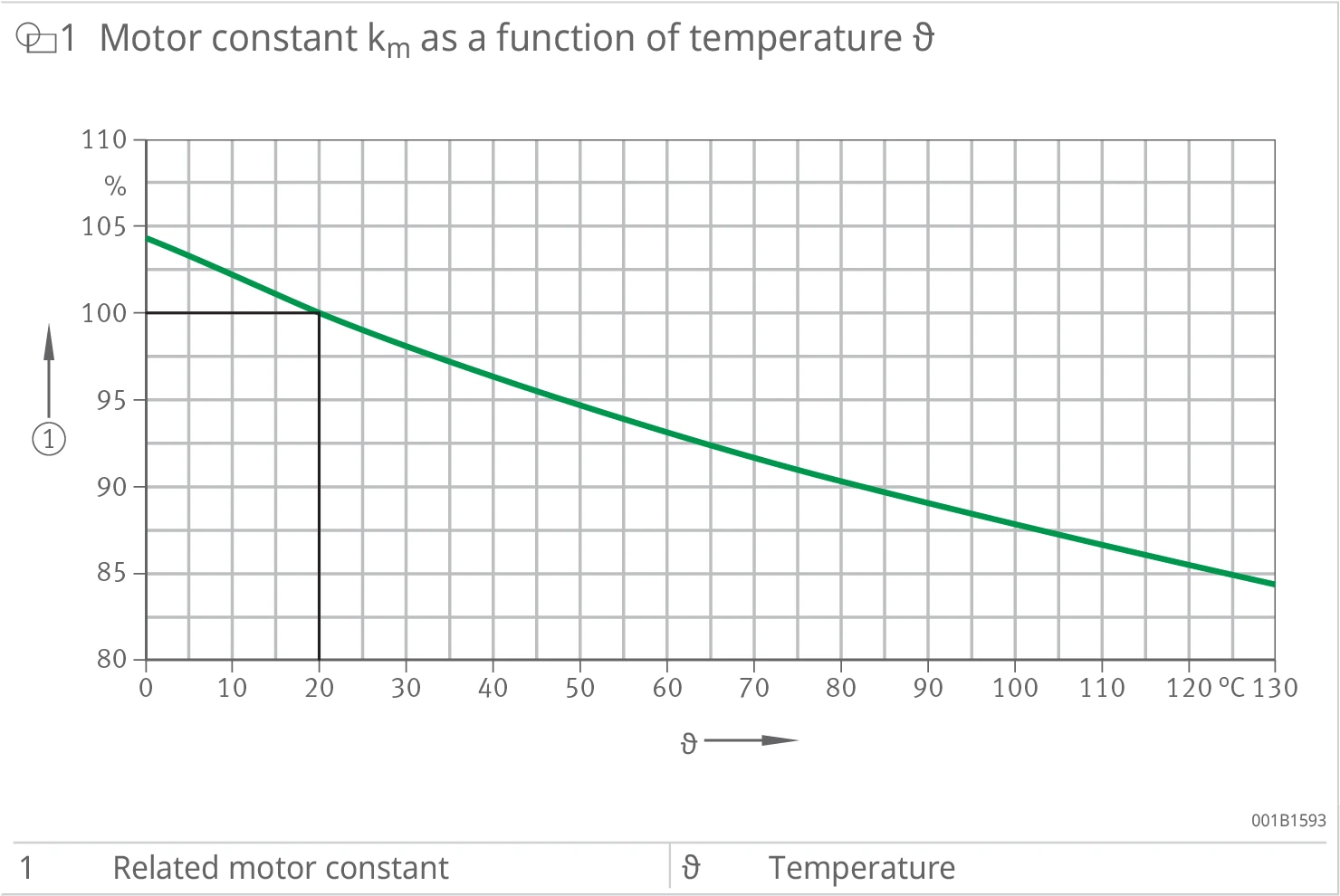
รูปที่ 1: ค่าคงที่ของมอเตอร์ km เป็นฟังก์ชันของอุณหภูมิ ϑ แกนตั้งคือค่าคงที่ของมอเตอร์สัมพัทธ์ (%) แกนนอนคืออุณหภูมิ ϑ (°C) เส้นโค้งอยู่ที่ 100% สำหรับ +20 °C และลดลงเมื่ออุณหภูมิสูงขึ้น ลดลงเหลือประมาณ 84% ที่ +130 °C ①=ค่าคงที่ของมอเตอร์สัมพัทธ์, ϑ=อุณหภูมิ
พฤติกรรมเชิงความร้อน
การเพิ่มขึ้นของอุณหภูมิทำให้ความต้านทานของขดลวดเพิ่มขึ้น ซึ่งมีผลทำให้ค่าคงที่ของมอเตอร์ km ลดลง ที่ +130 °C ค่าคงที่ของมอเตอร์ km จะลดลงเหลือ 0.84 เท่าของค่าปกติ ที่กระแสคงที่ซึ่งสร้างแรงบิดในทางกลับกัน กำลังสูญเสียในมอเตอร์ที่ร้อนจะสูงกว่าในมอเตอร์ที่เย็น กำลังสูญเสียนี้จะยิ่งเพิ่มอุณหภูมิของมอเตอร์ให้สูงขึ้นอีก
1.4.2 การออกแบบขดลวดและความสัมพันธ์
ประการแรกและสำคัญที่สุด ซีรีส์เป็นตัวกำหนดความเร็วจำกัดของมอเตอร์แรงบิด การออกแบบต่อไปนี้เป็นไปได้:
- มอเตอร์แรงบิด RIB: สเตเตอร์มีแกนเหล็กอัดแผ่น สำหรับโรเตอร์ แม่เหล็กถูกติดลงบนวงแหวนเหล็ก
- มอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB: สเตเตอร์มีแกนเหล็กอัดแผ่น สำหรับโรเตอร์ แม่เหล็กถูกฝังเข้าไปในแกนเหล็กอัดแผ่น
ภายในซีรีส์เดียวกัน ขนาด แรงดันบัส DC และการออกแบบขดลวดมีผลต่อความเร็วจำกัด
แรงดันตกภายในมอเตอร์ทำให้ความต้องการแรงดันเพิ่มขึ้นเมื่อความเร็วเพิ่มขึ้น ที่ความเร็วหัวเข่าที่ระบุไว้ในข้อมูลสมรรถนะ ความต้องการแรงดันจะเท่ากับแรงดันบัส DC ของเซอร์โวคอนเวอร์เตอร์ที่มีการควบคุมแบบเชิงสนาม (field-oriented control) หลังจากนั้นความเร็วจะลดลงอย่างรวดเร็ว ยิ่งแรงดันบัส DC สูงและค่าคงที่แรงดันที่สัมพันธ์กับขดลวด kû ยิ่งเล็ก ก็ยิ่งได้ความเร็วจำกัดที่สูงขึ้น เนื่องจากมีความสัมพันธ์ระหว่างค่าคงที่แรงดันกับค่าคงที่แรงบิด ความต้องการกำลังของมอเตอร์จึงเพิ่มขึ้นเมื่อความต้องการความเร็วสูงขึ้นที่แรงบิดเท่าเดิม ขดลวดมาตรฐานหนึ่งชนิดหรือมากกว่าถูกกำหนดไว้ล่วงหน้าสำหรับความเร็วจำกัดและความต้องการเชิงพลวัตที่ต่างกันที่แรงดันบัส DC คงที่ UDCL
1.4.2.1 การเปลี่ยนแปลงแรงดันบัส DC
แรงดันบัส DC มีผลต่อขีดจำกัดความเร็วที่ขึ้นกับขดลวด หากแรงดันบัส DC เปลี่ยนแปลงสูงสุด ±10 % สามารถสมมติให้มีความเป็นสัดส่วนระหว่างแรงดันบัส DC กับขีดจำกัดความเร็วได้ สำหรับการเลือกมอเตอร์เบื้องต้น ขีดจำกัดความเร็วที่แม่นยำสำหรับแรงดันบัส DC เฉพาะของลูกค้าสามารถขอได้จากวิศวกรประยุกต์ ตลอดจนแผนกขายของ Schaeffler Industrial Drives
ที่แรงดันบัส DC ต่ำลง ความเร็วจำกัดจะลดลง เส้นโค้งคุณลักษณะแรงบิด–กระแสแสดงแรงบิดที่จุดทำงานต่าง ๆ เส้นโค้งคุณลักษณะแรงบิด–ความเร็วแสดงความสัมพันธ์ระหว่างแรงบิดกับความเร็วที่จุดทำงานต่าง ๆ
เส้นโค้งแรงบิด–ความเร็วมีให้บริการในรูปแบบเอกสารข้อมูลจากวิศวกรประยุกต์และแผนกขายของ Schaeffler Industrial Drives ติดต่อ: sales-sid@schaeffler.com
1.4.3 เส้นโค้งคุณลักษณะแรงบิด/ความเร็ว
มอเตอร์แรงบิด RIB
เส้นโค้งคุณลักษณะแรงบิด–ความเร็วสำหรับมอเตอร์แรงบิด RIB แสดงขีดจำกัดความเร็วที่ขึ้นกับขดลวดเป็นฟังก์ชันของแรงบิดที่แรงดันบัส DC คงที่ โดยไม่มีการลดสนาม (field weakening) เส้นโค้งคุณลักษณะนี้ไม่ได้อธิบายวัฏจักรการทำงานและพฤติกรรมเชิงความร้อนที่เกี่ยวข้องของมอเตอร์ เส้นโค้งคุณลักษณะแสดงเฉพาะช่วงที่มอเตอร์สามารถเข้าถึงได้ที่อุณหภูมิขดลวด +20 °C เท่านั้น
จุดทำงานที่แรงบิดเกิน Tcw มีข้อจำกัดด้านเวลา เพื่อป้องกันไม่ให้สเตเตอร์ร้อนเกินไป ที่ Tu อุณหภูมิเอาต์พุตของโรเตอร์ที่สูงเกินไปอาจนำไปสู่การลดสภาพแม่เหล็ก (demagnetisation)
ที่ n > nlwS1 มอเตอร์อาจทำงานได้เฉพาะในช่วงเวลาที่กำหนดเท่านั้น เนื่องจากการสูญเสียเพิ่มเติมที่ขึ้นกับความถี่ อีกทางเลือกหนึ่งคือสามารถลดกระแสสำหรับการทำงานต่อเนื่องได้ ความเร็วพิกัด (S1) แบบระบายความร้อน nlwS1 สามารถเท่ากับ nlw ได้เช่นกัน ขึ้นอยู่กับขนาดมอเตอร์และการออกแบบขดลวด
ความเร็วจำกัด nlc ที่ Ic eff และ Tc มีความสำคัญต่อการทำความเข้าใจเส้นโค้งคุณลักษณะ แต่ไม่ได้ระบุไว้ในข้อมูลสมรรถนะ เนื่องจากมีความเกี่ยวข้องน้อย
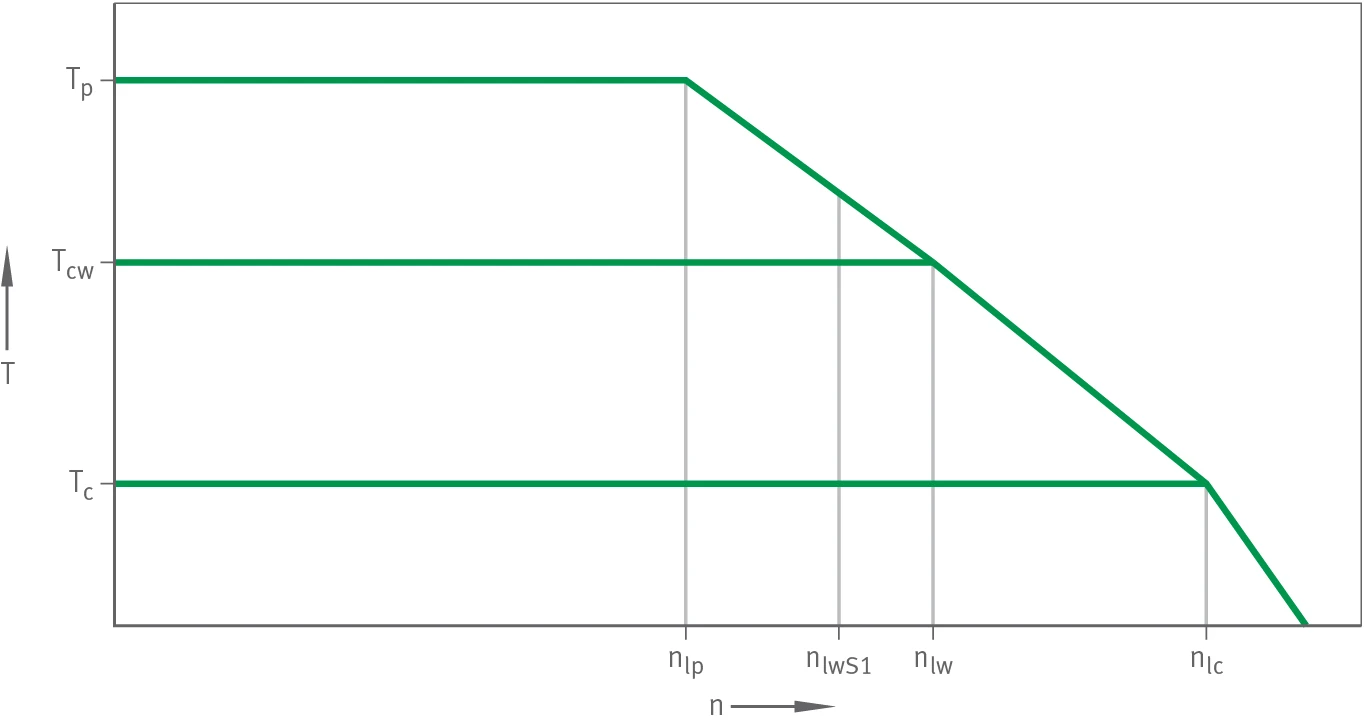
รูปที่ 2: มอเตอร์แรงบิด RIB: เส้นโค้งคุณลักษณะแรงบิด–ความเร็ว แกนตั้งคือแรงบิด T แกนนอนคือความเร็ว n เส้นโค้งแสดงแรงบิดสามระดับ Tp, Tcw, Tc พร้อมขีดจำกัดความเร็วที่สัมพันธ์กัน nlp, nlwS1, nlw, nlc นิยามสัญลักษณ์: T=แรงบิด, n=ความเร็ว, Tc=แรงบิดต่อเนื่อง แบบไม่ระบายความร้อน, Tcw=แรงบิดต่อเนื่อง แบบระบายความร้อน, Tp=แรงบิดพีค, nlc=ความเร็วจำกัดที่ Ic eff และ UDCL, nlp=ความเร็วจำกัดที่ Ip eff และ UDCL, nlw=ความเร็วหัวเข่า, nlwS1=ความเร็วพิกัด S1 แบบระบายความร้อน
มอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB
เส้นโค้งคุณลักษณะแรงบิด–ความเร็วสำหรับความเร็วต่อเนื่อง แสดงขีดจำกัดความเร็วที่ขึ้นกับขดลวดเป็นฟังก์ชันของแรงบิดที่ความเร็วสูงและแรงดันบัส DC คงที่ พร้อมการลดสนาม มอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB สามารถทำงานต่อเนื่องได้ที่จุดทำงานที่แสดงในเส้นโค้งคุณลักษณะ
การทำงานที่แรงบิดต่อเนื่อง Tcw เป็นไปได้จนถึงความเร็ว nlwS1 ที่ความเร็วสูงขึ้นจนถึงความเร็ว nlw2 การทำงานต่อเนื่องต้องลดกระแสจาก Icw eff เป็น Icw2 eff แรงบิดที่สัมพันธ์กันคือ Tcw2
ระหว่าง nlw2 และ nlw3 กระแสต่อเนื่องสูงสุดที่ยอมให้ได้ก็คือ Icw2 eff เช่นกัน ความก้าวหน้าของแรงบิดที่สัมพันธ์กันขึ้นอยู่กับขดลวดและการจัดวางโรเตอร์ ที่ nlw3 และ Icw2 eff แรงบิดที่สัมพันธ์กันคือ Tcw3 กำลังเชิงกลที่จุดทำงานนี้คือ Pmax S1 ความก้าวหน้าที่แม่นยำระหว่าง nlw2 และ nlw3 สามารถดูได้เฉพาะในเอกสารข้อมูลเฉพาะของผลิตภัณฑ์ ซึ่งต้องร้องขอจาก Schaeffler Industrial Drives
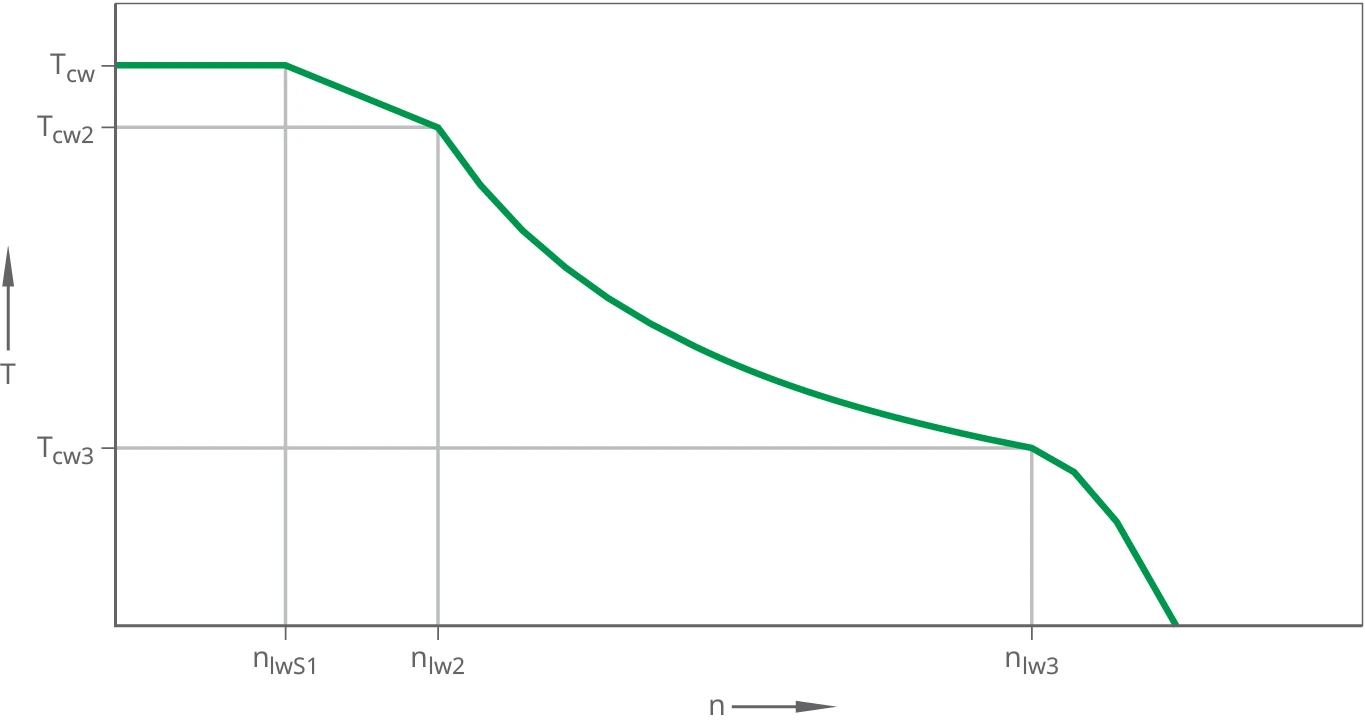
รูปที่ 3: มอเตอร์แรงบิด RKIB: เส้นโค้งคุณลักษณะแรงบิด–ความเร็วสำหรับความเร็วต่อเนื่อง แกนตั้งคือแรงบิด T แกนนอนคือความเร็ว n เส้นโค้งแสดง Tcw, Tcw2, Tcw3 พร้อมขีดจำกัดความเร็วที่สัมพันธ์กัน nlwS1, nlw2, nlw3 นิยามสัญลักษณ์: n=ความเร็ว, T=แรงบิด, Tcw=แรงบิดต่อเนื่อง แบบระบายความร้อน, Tcw2=แรงบิดที่ Icw2 eff และ nlw2, Tcw3=แรงบิดที่ Icw2 eff และ nlw3, nlwS1=ความเร็วพิกัด S1 แบบระบายความร้อน, nlw2=ความเร็วทำงาน FS ที่ Icw2 eff และ UDCL, nlw3=ความเร็วจำกัดที่ Icw2 eff และ UDCL ในการทำงานต่อเนื่อง
เผื่อสำรองการควบคุม: ความเร็วทั้งหมดที่ระบุไว้สัมพันธ์กับแรงดันบัส DC คงที่ UDCL สำหรับอินเวอร์เตอร์ความถี่ที่ไม่มีบัส DC แบบเสถียร UDCL จะไม่คงที่ ดังนั้นจุดทำงานจึงต้องเผื่อสำรองการควบคุมเป็นฟังก์ชันของความผันผวนของแรงดันบัส DC โดยทั่วไป สำหรับอินเวอร์เตอร์ความถี่ที่ไม่มีบัส DC แบบเสถียร ความเร็วที่จุดทำงานไม่ควรเกินประมาณ 80 % ของความเร็วที่มอเตอร์สามารถทำได้ที่จุดทำงานนี้
1.4.4 เส้นโค้งคุณลักษณะแรงบิด/กระแส
กระแสของมอเตอร์ในช่วงระหว่าง 0 A ถึงกระแสพีคเชิงเส้น Ipl eff สร้างแรงบิดที่ขึ้นต่อกันแบบเชิงเส้น กระแสพีค Ipl eff สร้างแรงบิดพีคเชิงเส้น Tpl ค่าคงที่ของมอเตอร์ km เหมาะสำหรับการคำนวณกำลังสูญเสียในช่วงระหว่าง 0 A ถึง Ipl eff ค่าคงที่แรงบิด kT ใช้ในช่วงนี้เพื่อคำนวณแรงบิดจากกระแส หรือในทางกลับกัน
ค่าของกระแสพีคเชิงเส้น Ipl eff ไม่ขึ้นกับอุณหภูมิ ค่านี้ขึ้นอยู่กับซีรีส์และการออกแบบขดลวด อาจต่ำกว่าหรือสูงกว่าค่าของกระแสต่อเนื่องแบบระบายความร้อน Icw eff กระแสพีคเชิงเส้น Ipl eff และแรงบิดพีคเชิงเส้นที่สัมพันธ์กัน Tpl มีความสำคัญต่อการทำความเข้าใจเส้นโค้งคุณลักษณะ อย่างไรก็ตาม เนื่องจากค่าเหล่านี้มีความเกี่ยวข้องในทางปฏิบัติน้อยมาก จึงไม่ได้ระบุไว้ในข้อมูลสมรรถนะ
เส้นโค้งคุณลักษณะแรงบิด–กระแสจะไม่เป็นเชิงเส้นอีกต่อไปที่ I > Ip eff การอิ่มตัวของวงจรแม่เหล็กของมอเตอร์เป็นสาเหตุของความไม่เป็นเชิงเส้นนี้ ระหว่างจุดแรงบิด–กระแส Tp ที่ Ip eff และ Tu ที่ Iu eff เส้นโค้งคุณลักษณะจะกลายเป็นไม่เชิงเส้น ในช่วงนี้ ความชันของเส้นโค้งจะแปรผันและต่ำกว่าค่าของค่าคงที่แรงบิด kT อย่างมีนัยสำคัญ
มอเตอร์สามารถทำงานได้เป็นเวลาไม่กี่วินาทีจนถึงจุดทำงาน Tp, Ip eff นี่คือจุดทำงานสูงสุดสำหรับกระบวนการเร่ง เนื่องจากความเสี่ยงของการลดสภาพแม่เหล็กของแม่เหล็กถาวร มอเตอร์ต้องไม่ทำงานเกินจุดจำกัด Tu, Iu eff
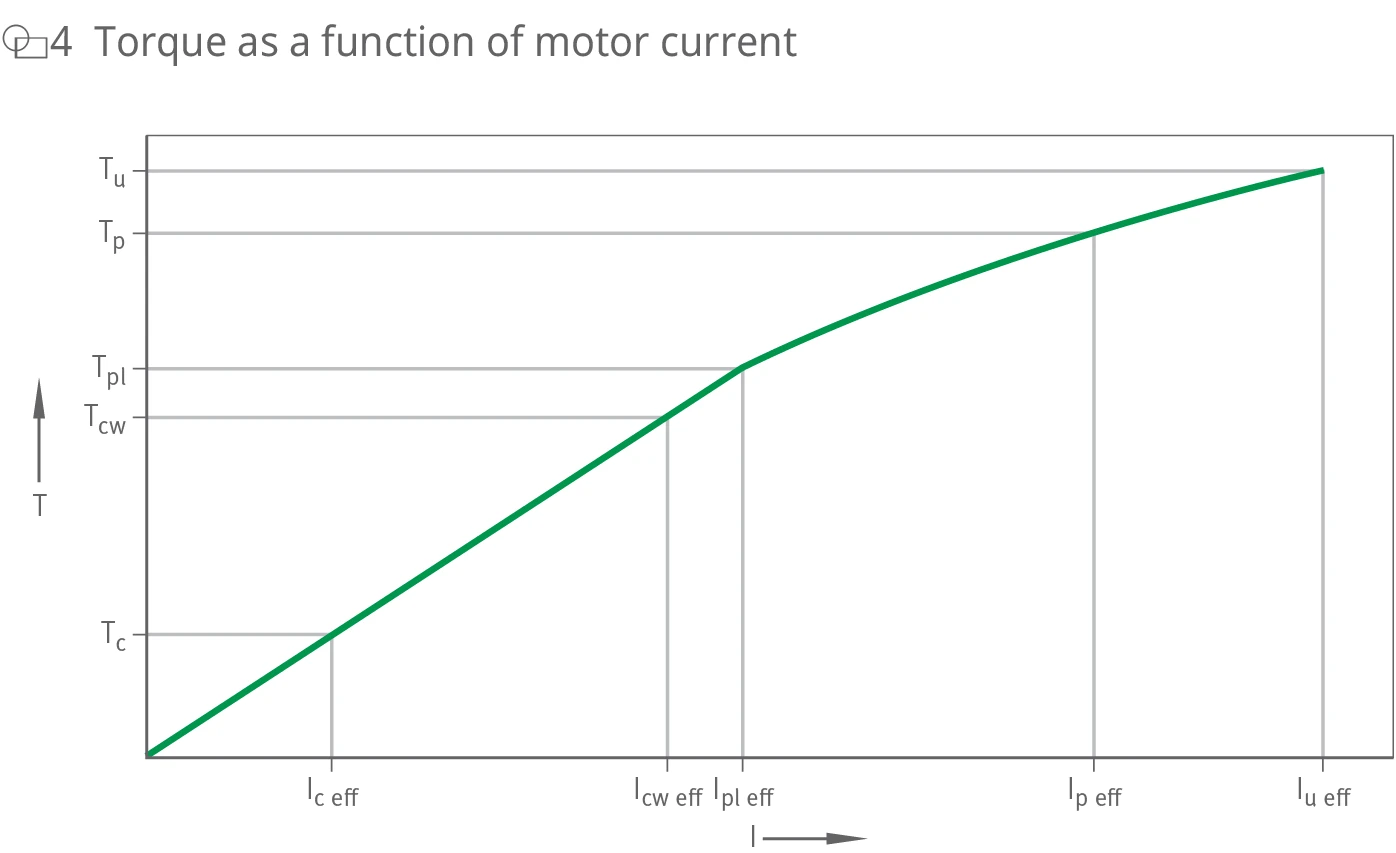
รูปที่ 4: แรงบิดเป็นฟังก์ชันของกระแสมอเตอร์ แกนตั้งคือแรงบิด T แกนนอนคือกระแสมอเตอร์ I เส้นโค้งเป็นเชิงเส้นระหว่าง 0 และ Ip eff และกลายเป็นไม่เชิงเส้นเมื่อเกินไป เนื่องจากการอิ่มตัวของแม่เหล็ก จนถึง Tu, Iu eff ระดับแรงบิด Tc, Tcw, Tpl, Tp, Tu และจุดกระแส Ic eff, Icw eff, Ipl eff, Ip eff, Iu eff ถูกทำเครื่องหมายไว้
1.5 การป้องกันมอเตอร์เชิงความร้อน
1.5.1 วงจรเฝ้าตรวจ I และ II
ผู้ใช้มักใช้งานชุดขับเคลื่อนตรง (direct drive) ที่ขีดจำกัดสมรรถนะเชิงความร้อน นอกจากนี้ การโอเวอร์โหลดที่คาดเดาไม่ได้อาจเกิดขึ้นระหว่างการทำงาน การโอเวอร์โหลดส่งผลให้เกิดภาระกระแสที่สูงกว่ากระแสต่อเนื่องที่ยอมให้ได้ ในกรณีโอเวอร์โหลด กระแสมอเตอร์ยังผล ซึ่งเป็นค่ารากที่สองของกำลังสองเฉลี่ย I²t ต้องไม่เกินกระแสต่อเนื่องของมอเตอร์ที่ยอมให้ได้ สำหรับกระแสเกินระยะสั้น อิเล็กทรอนิกส์กำลังต้องมีแบบจำลองการป้องกันมอเตอร์ I²t เพื่อควบคุมกระแสมอเตอร์ การเฝ้าตรวจอุณหภูมิทางอ้อมนี้รวดเร็วและเชื่อถือได้มาก ในระหว่างการเริ่มเดินเครื่องมอเตอร์ ผู้ใช้ต้องตรวจสอบให้แน่ใจว่าได้เปิดการเฝ้าตรวจ I²t ไว้
มอเตอร์จาก Schaeffler Industrial Drives ต้องได้รับการป้องกันด้วยการเฝ้าตรวจอุณหภูมิมอเตอร์ วงจรเฝ้าตรวจ I ของรุ่นมาตรฐานประกอบด้วยเซ็นเซอร์ PTC จำนวน 3 ตัว ต่ออนุกรมกันบนขดลวดสามเฟส วงจรเฝ้าตรวจ II ยังรวมเซ็นเซอร์ Pt1000 บนเฟสหนึ่งในมอเตอร์ด้วย เซ็นเซอร์นี้ทำให้สามารถตั้งค่าเกณฑ์เตือนล่วงหน้าได้
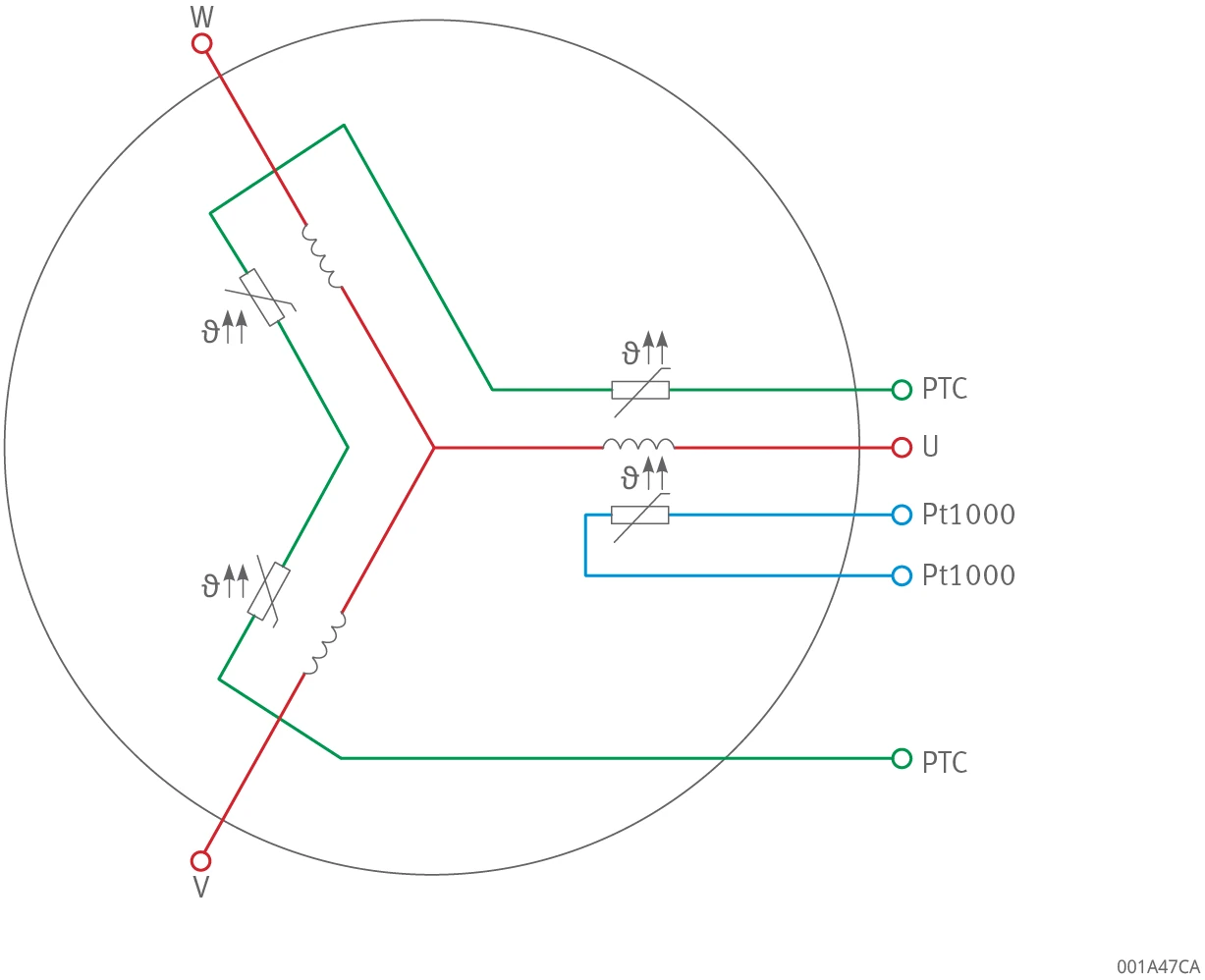
รูปที่ 5: การต่อมาตรฐานของชุด PTC สามตัวและ Pt1000 แสดงการจัดวางขั้วต่อของเซ็นเซอร์ PTC จำนวน 3 ตัวที่ต่ออนุกรมกันบนขดลวดสามเฟส U, V, W ของมอเตอร์ และเซ็นเซอร์ Pt1000 บนเฟสหนึ่ง
เซ็นเซอร์ PTC และ Pt1000 มีฉนวนพื้นฐานจากมอเตอร์ เซ็นเซอร์เหล่านี้ไม่เหมาะสำหรับการต่อโดยตรงกับวงจร PELV หรือวงจร SELV ตามมาตรฐาน DIN EN 61800-5-1
1.5.2 วงจรเฝ้าตรวจ I
PTC เป็นเทอร์มิสเตอร์ PTC มีค่าคงที่เวลาเชิงความร้อนไม่กี่วินาที ในทางตรงกันข้ามกับ Pt1000 ความต้านทานของ PTC จะเพิ่มขึ้นอย่างรวดเร็วมากเมื่ออุณหภูมิตอบสนองพิกัด ϑn ถูกเกิน ความต้านทานจะเพิ่มขึ้นเป็นหลายเท่าของค่าตอนเย็นเมื่ออุณหภูมิตอบสนองพิกัดถูกเกิน
เมื่อใช้ PTC สามตัว กล่าวคือเซ็นเซอร์ PTC สามตัวต่ออนุกรมกัน ความต้านทานรวมจะเปลี่ยนแปลงอย่างมีนัยสำคัญ การเปลี่ยนแปลงที่มากนี้จะเกิดขึ้นเช่นกันแม้เซ็นเซอร์เพียงตัวเดียวจะเกินอุณหภูมิตอบสนอง ϑn การใช้เซ็นเซอร์ PTC สามตัวช่วยให้มั่นใจว่ามอเตอร์ยังสามารถถูกตัดการทำงานได้อย่างปลอดภัยด้วยรีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์ ภายใต้ภาระเฟสที่ไม่สมมาตร เช่น ขณะหยุดนิ่ง รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์โดยทั่วไปจะทริปที่ระหว่าง 1.5 kΩ และ 3.5 kΩ จึงสั่งให้ชุดควบคุมหยุด
เซ็นเซอร์ PTC ตรวจจับอุณหภูมิเกินของแต่ละขดลวดด้วยความคลาดเคลื่อนเพียงไม่กี่องศา
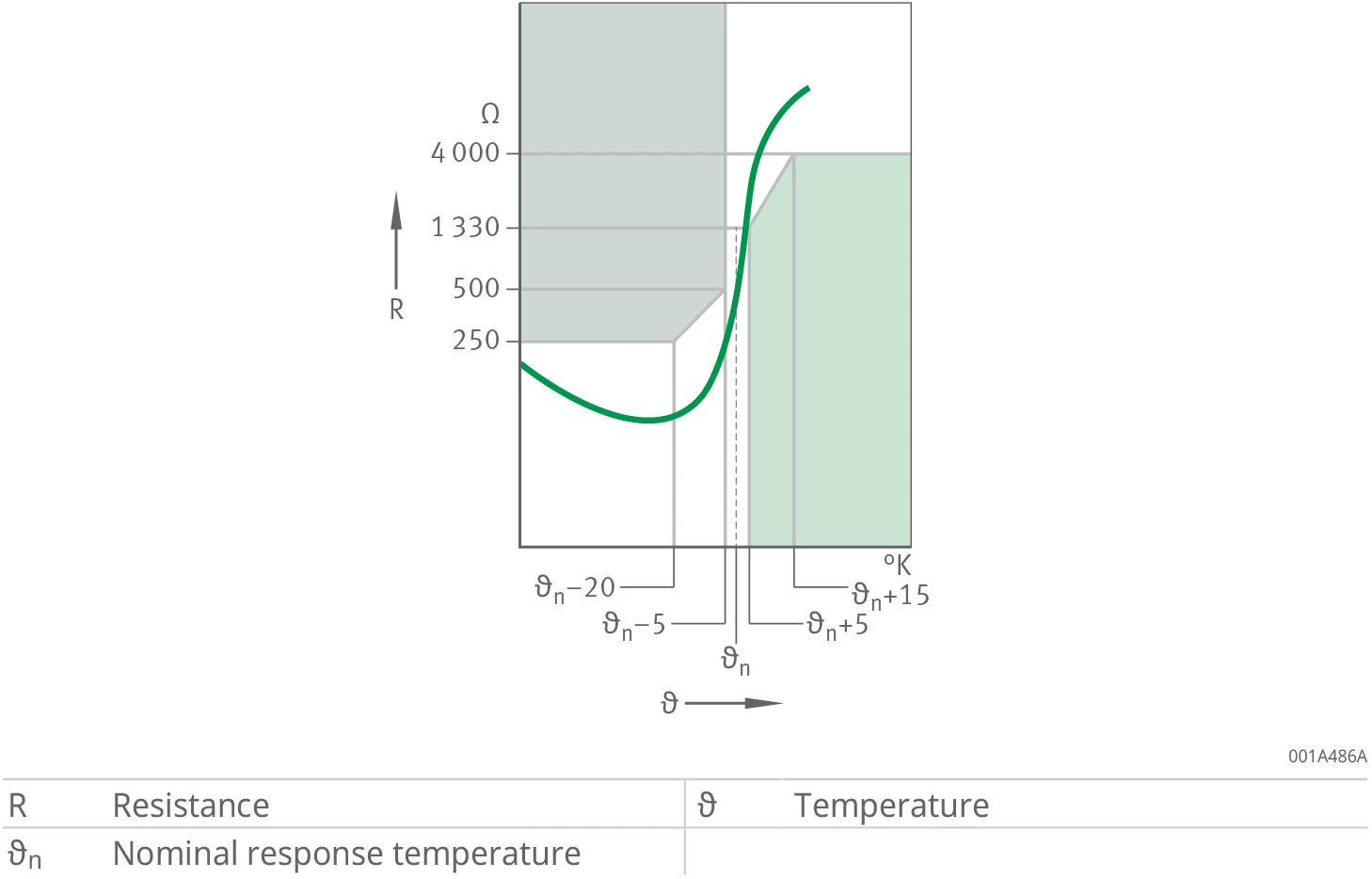
รูปที่ 6: คุณลักษณะอุณหภูมิของ PTC แกนตั้งคือความต้านทาน R (Ω) แกนนอนคืออุณหภูมิ ϑ ความต้านทานต่ำเมื่ออยู่ต่ำกว่าอุณหภูมิตอบสนองพิกัด ϑn และเพิ่มขึ้นอย่างรวดเร็วเมื่อเกินไป ระดับความต้านทาน 250, 500, 1330, 4000 Ω และช่วงอุณหภูมิ ϑn−20, ϑn−5, ϑn, ϑn+5, ϑn+15 ถูกทำเครื่องหมายไว้ นิยามสัญลักษณ์: R=ความต้านทาน, ϑ=อุณหภูมิ, ϑn=อุณหภูมิตอบสนองพิกัด
รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์จะตอบสนองด้วยเช่นกัน หากความต้านทานในวงจร PTC ต่ำเกินไป ความต้านทานที่ต่ำเกินไปอาจบ่งชี้ถึงข้อบกพร่องในวงจรเฝ้าตรวจ รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์ช่วยให้มั่นใจถึงการแยกทางไฟฟ้า (galvanic isolation) ที่ปลอดภัยของชุดควบคุมออกจากเซ็นเซอร์ PTC ในมอเตอร์ รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์ไม่รวมอยู่ในขอบเขตการจัดส่งของมอเตอร์ เซ็นเซอร์ PTC ของวงจรเฝ้าตรวจอุณหภูมิ I ไม่เหมาะสำหรับการวัดอุณหภูมิ วงจรเฝ้าตรวจ II เหมาะสำหรับการวัดอุณหภูมิ
โดยหลักการ รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์ที่ต่อกับเซอร์โวคอนเวอร์เตอร์ ต้องประเมินเซ็นเซอร์ PTC เพื่อการป้องกันอุณหภูมิของมอเตอร์
1.5.3 วงจรเฝ้าตรวจ II
Pt1000 เป็นเซ็นเซอร์อุณหภูมิแบบตัวต้านทานวัดที่ทำจากแพลทินัม เซ็นเซอร์นี้ใช้ประโยชน์จากการที่ความต้านทานทางไฟฟ้าของแพลทินัมขึ้นกับอุณหภูมิ มาตรฐาน EN 60751 อธิบายคุณลักษณะของเซ็นเซอร์
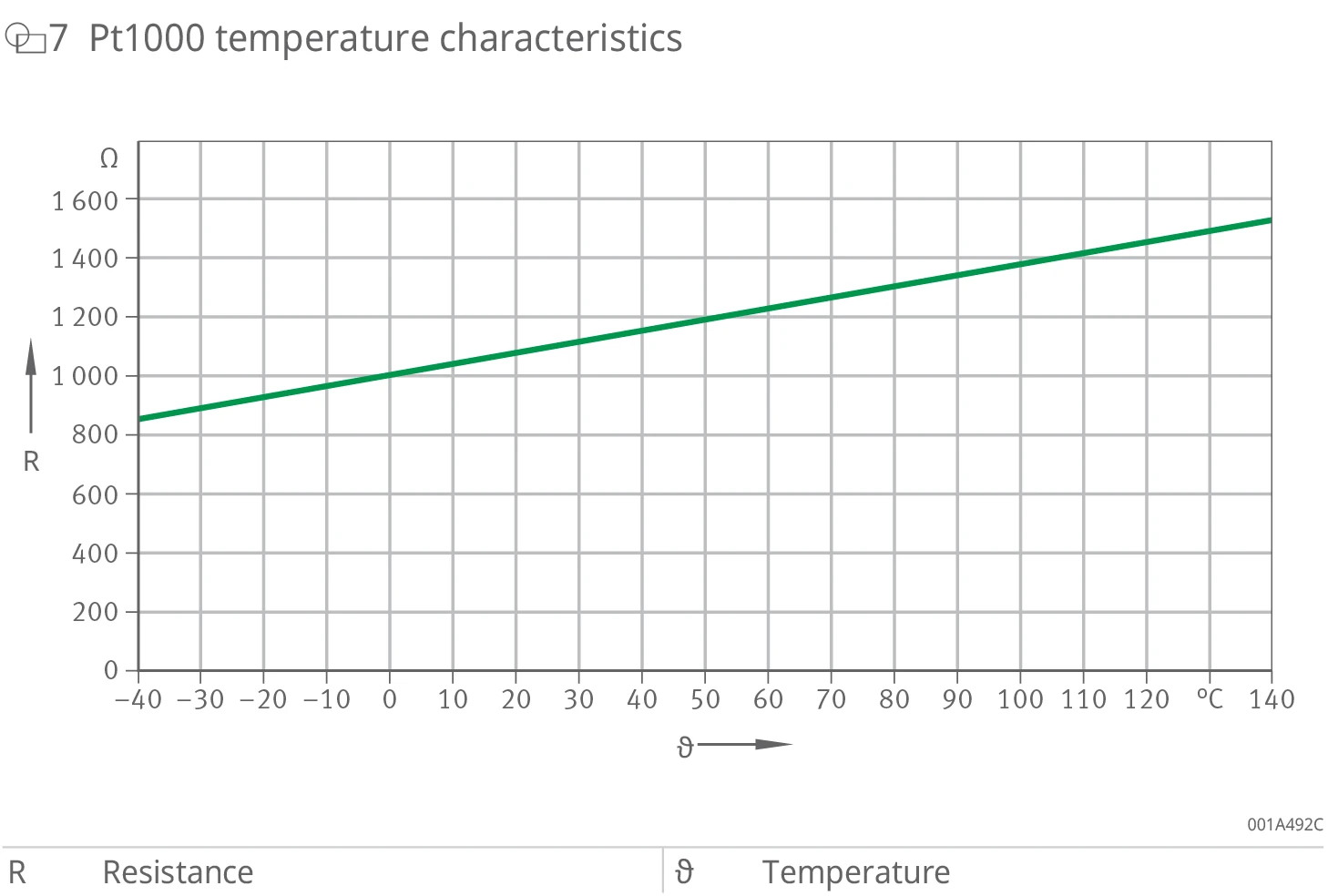
รูปที่ 7: คุณลักษณะอุณหภูมิของ Pt1000 แกนตั้งคือความต้านทาน R (Ω) แกนนอนคืออุณหภูมิ ϑ (−40 ถึง +140 °C) เส้นโค้งเพิ่มขึ้นแบบเชิงเส้น จากประมาณ 800 Ω (−40 °C) ถึงประมาณ 1540 Ω (+140 °C) นิยามสัญลักษณ์: R=ความต้านทาน, ϑ=อุณหภูมิ
ค่าคงที่เวลาเชิงความร้อนคือไม่กี่วินาทีในสภาพที่ติดตั้งแล้ว เกณฑ์เตือนล่วงหน้าและขีดจำกัดการตัดการทำงานถูกป้อนเข้าในชุดควบคุม และป้องกันมอเตอร์จากอุณหภูมิที่สูงเกินไป เกณฑ์เตือนล่วงหน้าช่วยป้องกันการตัดการทำงานในทันทีโดยรีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์
ขณะหยุดนิ่ง ขึ้นอยู่กับการใช้งาน กระแสคงที่อาจไหลผ่านขดลวดของมอเตอร์ ตำแหน่งของขั้วเป็นตัวกำหนดขนาดของกระแสคงที่ มอเตอร์จะไม่ร้อนขึ้นอย่างสม่ำเสมอเนื่องจากความสัมพันธ์นี้ ขดลวดที่ไม่ได้รับการเฝ้าตรวจอาจร้อนเกินไป เซ็นเซอร์ Pt1000 หนึ่งตัวสามารถเฝ้าตรวจได้เพียงเฟสเดียว การใช้และประเมินเซ็นเซอร์ Pt1000 สามตัวช่วยให้มั่นใจถึงการเฝ้าตรวจทุกเฟส สำหรับการใช้งานที่เข้าถึงขีดจำกัดภาระขณะหยุดนิ่งเป็นประจำ Schaeffler Industrial Drives แนะนำให้ใช้และประเมินเซ็นเซอร์ Pt1000 สามตัว
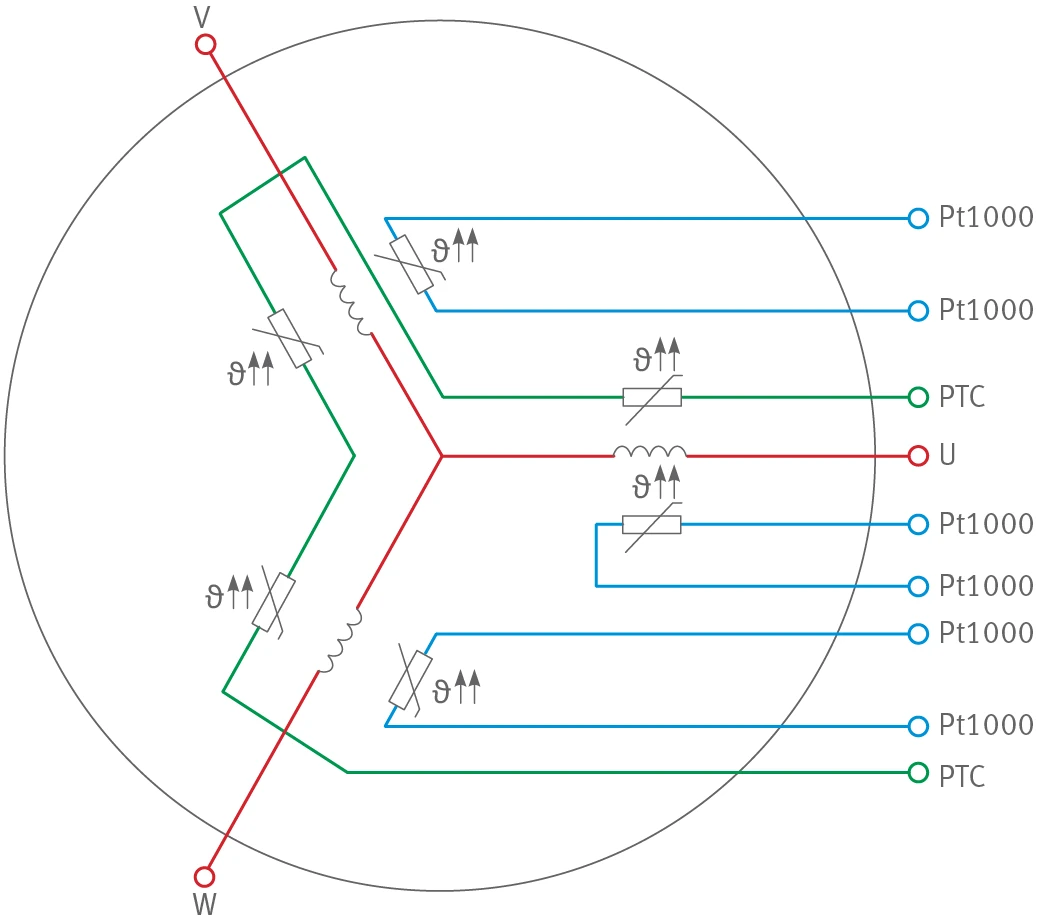
รูปที่ 8: การต่อชุด PTC สามตัวและ Pt1000 จำนวน 3 ตัว แสดงการจัดวางขั้วต่อของ PTC จำนวน 3 ตัว (ต่ออนุกรม) และเซ็นเซอร์ Pt1000 จำนวน 3 ตัวบนขดลวดสามเฟส V, U, W ของมอเตอร์
1.6 เทคโนโลยีการต่อเชื่อมทางไฟฟ้า
1.6.1 การต่อสายมาตรฐาน
การต่อสายมาตรฐานของมอเตอร์จาก Schaeffler Industrial Drives ติดตั้งด้วยการต่อแบบเกลียวในแนวแกน สำหรับมอเตอร์แรงบิด RIB ตำแหน่งสัมพัทธ์ของสายเทียบกับจุดต่อระบายความร้อนจะอยู่ตรงกลางของทางออกสาย สำหรับมอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB ที่มีทางออกสายหลายจุด ตำแหน่งสัมพัทธ์ไม่สามารถกำหนดได้ทั่วไป แบบเสนอราคาและแบบส่งมอบและแบบจำลอง 3D ถือเป็นเกณฑ์หลักและให้ตำแหน่งที่มีผลผูกพัน
มอเตอร์แรงบิด RIB จัดส่งพร้อมสายยาว 2 m ความยาวสายวัดจากทางออกของมอเตอร์ มอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB จัดส่งพร้อมสายยาว 2 m หรือ 5 m มีความยาวสายแบบกำหนดเองให้บริการ
หน้าตัดของสายเชื่อมต่อกำลังขึ้นอยู่กับกระแสต่อเนื่องของมอเตอร์ ตามมาตรฐาน การกำหนดขนาดอ้างอิงจากกระแสต่อเนื่อง Icw eff ที่ Plw (แบบระบายความร้อน) สามารถใช้ทางออกสายแบบแนวแกน แนวรัศมี และแนวสัมผัสได้ ทางออกสายที่ต้องการถูกกำหนดพร้อมกับคำสั่งซื้อ สำหรับกระแสมอเตอร์เกิน 70 A ทางออกสายจะถูกปรับให้เหมาะกับการใช้งานเฉพาะ
สายมีคุณลักษณะดังต่อไปนี้:
- มีฉนวนป้องกันสัญญาณรบกวน (shielded)
- ทนต่อน้ำมันและสารหล่อเย็นด้วยพื้นผิวภายนอกที่เป็นพอลิยูรีเทน
- ทนไฟ
- เหมาะสำหรับใช้งานกับโซ่ลากสาย (drag chain)
ปลายสายเปิดพร้อมปลอกหุ้มปลายสาย (ferrules) ในรุ่นมาตรฐาน สามารถทำทางออกสายเฉพาะการใช้งานได้
ตารางที่ 2: การต่อสายมอเตอร์ แบบมาตรฐาน
| หน้าตัด | กระแสต่อเนื่อง | เส้นผ่านศูนย์กลาง | รัศมีดัดงอต่ำสุด แบบยึดอยู่กับที่ | รัศมีดัดงอต่ำสุด แบบยืดหยุ่น | มวล |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4G0,75 | 10,4 | 8 | 40 | 80 | 95 |
| 4G1,5 | 16,1 | 9 | 45 | 90 | 140 |
| 4G2,5 | 22 | 10,5 | 52,5 | 105 | 210 |
| 4G4 | 30 | 12,5 | 62,5 | 125 | 296 |
| 4G6 | 37 | 14,5 | 72,5 | 145 | 416 |
| 4G10 | 52 | 17 | 85 | 170 | 644 |
| 4G16 | 70 | 20,5 | 102,5 | 205 | 997 |
ตารางที่ 3: การกำหนดขั้วต่อมอเตอร์
| ชื่อกำหนด | การกำหนด |
|---|---|
| 1/U | เฟส U |
| 2/V | เฟส V |
| 3/W | เฟส W |
| GNYE | PE |
สายเซ็นเซอร์ช่วยให้สามารถเฝ้าตรวจอุณหภูมิด้วยเซ็นเซอร์ PTC และ Pt1000 ปลายสายเปิดพร้อมปลอกหุ้มปลายสายในรุ่นมาตรฐาน สามารถทำทางออกสายเฉพาะการใช้งานได้
ตารางที่ 4: การต่อสายเซ็นเซอร์ แบบมาตรฐาน
| หน้าตัด | การเฝ้าตรวจอุณหภูมิ | เส้นผ่านศูนย์กลาง | รัศมีดัดงอต่ำสุด แบบยึดอยู่กับที่ | รัศมีดัดงอต่ำสุด แบบยืดหยุ่น | มวล |
|---|---|---|---|---|---|
| – | – | mm | mm | mm | g/m |
| Sensor 4×0,14 | P 1) | 4,8 | 24 | 36 | 40 |
| Sensor 7×0,14 | – | 5,7 | 29 | 43 | 67 |
| Sensor 10×0,14 | T 2) | 6,7 | 34 | 50 | 87 |
1) P = 1 Pt1000 + 3 PTC 2) T = 3 Pt1000 + 3 PTC
ตารางที่ 5: การกำหนดขั้วต่อ เซ็นเซอร์แบบ P
| ชื่อกำหนด | การกำหนด |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000 |
| YE | Pt1000 |
ตารางที่ 6: การกำหนดขั้วต่อ เซ็นเซอร์แบบ T
| ชื่อกำหนด | การกำหนด |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000-1 |
| YE | Pt1000-1 |
| GY | Pt1000-2 |
| PK | Pt1000-2 |
| BU | Pt1000-3 |
| RD | Pt1000-3 |
1.6.2 การต่อสายแบบพิเศษ
สำหรับมอเตอร์แรงบิด RKI และมอเตอร์แรงบิด RKIB การใช้สายเดี่ยวที่มีฉนวนป้องกันสัญญาณรบกวน อาจเหมาะสมในบางกรณี สายที่เลือกและตำแหน่งของสายสามารถดูได้จากแบบเสนอราคาและแบบส่งมอบ ตลอดจนแผนภาพวงจรเสนอราคา ค่าคุณลักษณะทั่วไปของสายเดี่ยวสามารถดูได้ในตาราง
ตารางที่ 7: การต่อสายมอเตอร์ แบบพิเศษ
| หน้าตัด | กระแสต่อเนื่อง | เส้นผ่านศูนย์กลาง | รัศมีดัดงอต่ำสุด แบบยึดอยู่กับที่ | รัศมีดัดงอต่ำสุด แบบยืดหยุ่น | มวล |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4×(1×2,5) | 22 | 4×6 | 24 | 45 | 4×58 |
| 4×(1×4) | 30 | 4×6,5 | 26 | 49 | 4×77 |
| 4×(1×6) | 37 | 4×7 | 28 | 53 | 4×101 |
| 4×(1×10) | 52 | 4×8,5 | 34 | 64 | 4×146 |
| 4×(1×16) | 70 | 4×10 | 40 | 75 | 4×223 |
| 4×(1×25) | 88 | 4×12 | 48 | 90 | 4×329 |
| 4×(1×35) | 110 | 4×13 | 52 | 98 | 4×444 |
1.6.3 ทิศทางการหมุนเชิงบวกของมอเตอร์
ทิศทางการหมุนเชิงบวกทางไฟฟ้าสอดคล้องกับสนามหมุนตามเข็มนาฬิกาในมอเตอร์สามเฟสทุกตัว กล่าวคือ แรงดันเฟสถูกเหนี่ยวนำในลำดับ U, V, W มอเตอร์จาก Schaeffler Industrial Drives มีทิศทางการหมุนเชิงบวกพร้อมการเคลื่อนที่ของโรเตอร์ดังต่อไปนี้:
- ทวนเข็มนาฬิกาเมื่อมองด้านที่มีทางออกสายจากด้านบน
- ตามเข็มนาฬิกาเมื่อมองด้านที่หันออกจากทางออกสายจากด้านล่าง
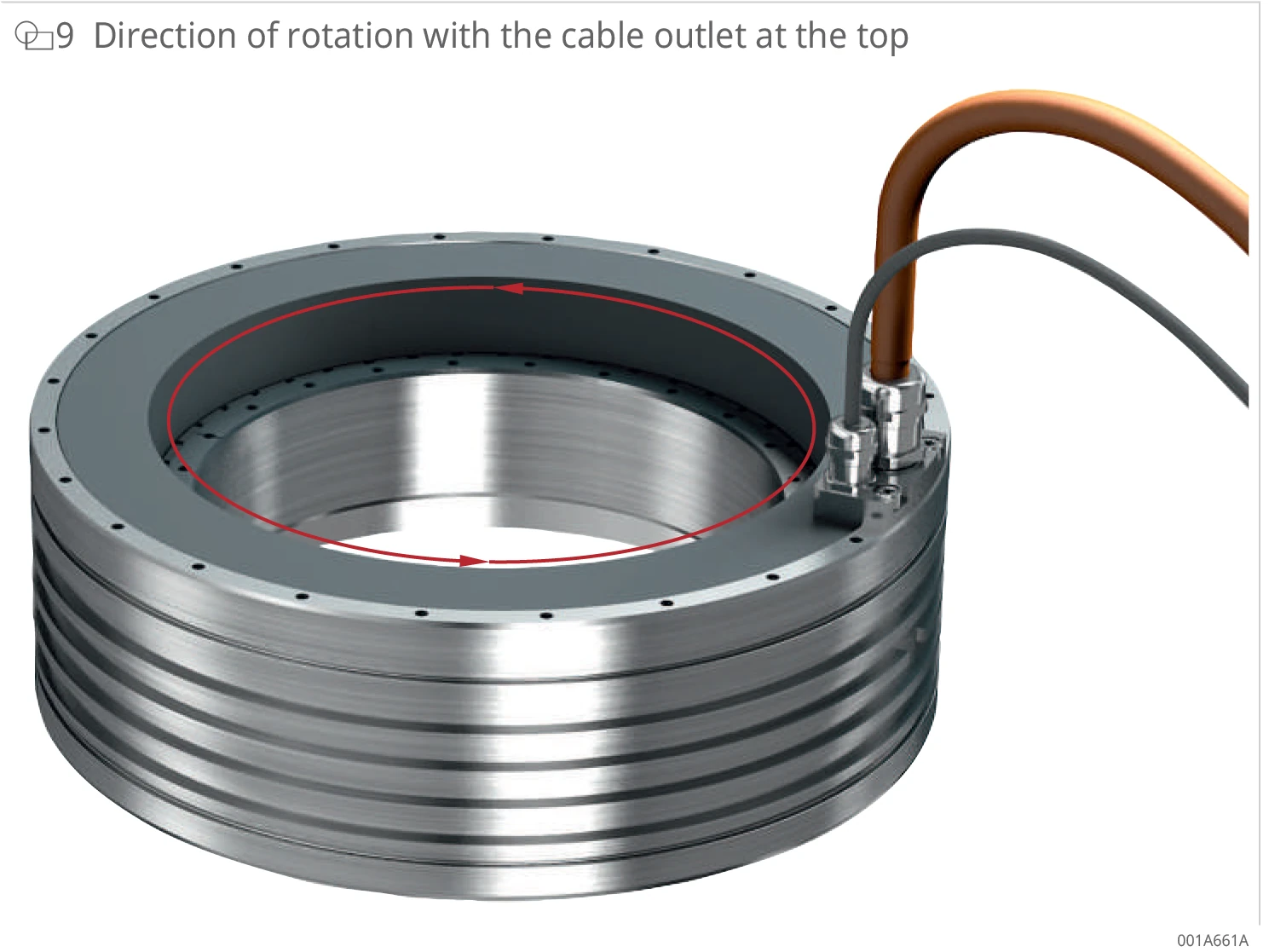
รูปที่ 9: ทิศทางการหมุนเมื่อทางออกสายอยู่ด้านบน ภาพถ่ายมอเตอร์ทำเครื่องหมายทิศทางการหมุนพร้อมการเคลื่อนที่ของโรเตอร์ (ลูกศรสีแดง ทวนเข็มนาฬิกา)
1.6.4 การสับเปลี่ยน
มอเตอร์ซิงโครนัสควรทำงานพร้อมการสับเปลี่ยนเมื่อเป็นไปได้ Schaeffler แนะนำการสับเปลี่ยนที่อ้างอิงจากระบบวัด เนื่องจากได้รับการรองรับโดยเซอร์โวไดรฟ์และชุดควบคุมสมัยใหม่
1.6.5 ความแข็งแรงของฉนวนและปรากฏการณ์แรงดันเกิน
Schaeffler Industrial Drives พัฒนา ออกแบบ และผลิตมอเตอร์ตามข้อกำหนดต่อไปนี้: 2014/35/EU อุปกรณ์ไฟฟ้าสำหรับใช้งานภายในขีดจำกัดแรงดันบางช่วง มอเตอร์เป็นไปตามข้อกำหนดต่อไปนี้: 2014/30/EU ความเข้ากันได้ทางแม่เหล็กไฟฟ้า มอเตอร์มีไว้สำหรับการใช้งานตามที่ตั้งใจในระบบ PDS (power drive system) ตามมาตรฐาน DIN EN 61800-5-1
ระบบฉนวนของมอเตอร์ได้รับการออกแบบให้อยู่ในหมวดแรงดันเกินระดับ III และปรับให้เหมาะที่สุดเพื่ออายุการใช้งานสูงสุด ความแข็งแรงไดอิเล็กทริกของระบบฉนวนได้รับการตรวจสอบก่อนการจัดส่ง วิธีการทดสอบสมัยใหม่ เช่น การวัดแรงดันเริ่มต้นการคายประจุบางส่วน (partial discharge inception voltage) ช่วยให้มั่นใจถึงอายุการใช้งานและสมรรถนะของมอเตอร์ในระยะเวลาที่ยาวนาน
เมื่อติดตั้งแล้ว มอเตอร์เป็นส่วนหนึ่งของ PDS ซึ่งประกอบด้วยมอเตอร์ สายมอเตอร์ และชิ้นส่วนคอนเวอร์เตอร์ เช่น โมดูลจ่ายไฟ โมดูลผลิตไฟกลับ (regenerative modules) ชุดควบคุมไดรฟ์ และฟิลเตอร์ ผลกระทบที่ไม่พึงประสงค์และคาดเดาไม่ได้สามารถเกิดขึ้นภายใน PDS ผู้ผลิตชุดควบคุมมักให้คำแนะนำและข้อมูลการวางแผนโครงการที่ผู้ใช้ควรปฏิบัติตามและยึดถือ การไม่ปฏิบัติตามอาจส่งผลให้ระบบฉนวนของมอเตอร์หรือคอนเวอร์เตอร์ชำรุดก่อนเวลาอันควร
มาตรการต่อไปนี้ช่วยให้การทำงานปลอดภัยยิ่งขึ้น ไม่ว่าจะใช้คอนเวอร์เตอร์ใดก็ตาม:
- การรองรับสายสั้นและการหุ้มฉนวนป้องกันสัญญาณรบกวนแบบพื้นที่กว้าง: สายสั้นและการรองรับ/สัมผัสฉนวนป้องกันสัญญาณรบกวนแบบพื้นที่กว้าง ช่วยหลีกเลี่ยงแรงดันเกินที่เกิดจากการสะท้อนความถี่สูงบนสายมอเตอร์ สายมอเตอร์ที่มีความยาว 10 m หรือมากกว่าระหว่างมอเตอร์กับคอนเวอร์เตอร์จะเพิ่มความน่าจะเป็นของแรงดันเกิน Schaeffler Industrial Drives แนะนำให้วัดแรงดันที่ขั้วต่อมอเตอร์ด้วยเทคโนโลยีไฟฟ้าแรงสูงที่เหมาะสมเมื่อนำเครื่องจักรเข้าใช้งาน
- การเลือกมอเตอร์ที่ถูกต้อง: ต้องเลือกมอเตอร์ตามแรงดันบัส DC ของคอนเวอร์เตอร์ ในกรณีส่วนใหญ่ แรงดันบัส DC คือ 600 V แรงดันบัส DC ที่ต่ำลงจะลดการตอบสนองเชิงพลวัตและความเร็วสูงสุด จำเป็นต้องใช้ระบบฉนวนเสริมความแข็งแรง หากแรงดันบัส DC เป็น 720 V หรือสูงกว่า หรือความสูงในการติดตั้งมากกว่า 2000 m ในกรณีดังกล่าวให้ติดต่อ Schaeffler Industrial Drives มอเตอร์ที่มีค่าความเหนี่ยวนำสูงกว่า 50 mH อย่างมาก โดยวัดจากเฟสถึงเฟส อาจใช้งานได้เฉพาะหลังการตรวจสอบเป็นรายบุคคลโดยผู้ผลิตคอนเวอร์เตอร์และ Schaeffler Industrial Drives เนื่องจากมิฉะนั้นแรงดันกระชาก (voltage spikes) อาจทำให้เกิดการสั่นพ้อง (resonances) ใน PDS (power drive system) และทำให้ระบบฉนวนเสียหาย
ต้องปฏิบัติตามคำแนะนำจากผู้ผลิตคอนเวอร์เตอร์ หากกรณีต่อไปนี้กรณีใดกรณีหนึ่งเกิดขึ้น จะต้องระบุไว้ในคำขอ หรืออีกทางเลือกหนึ่ง สามารถดำเนินการวัดแรงดันพุ่งเกินชั่วครู่ (transient overshoot) ได้ระหว่างการเริ่มเดินเครื่อง ณ สถานที่จริง
- PDS ที่มีโมดูลคอนเวอร์เตอร์แบบหลายแกน หรือแหล่งจ่ายไฟแบบควบคุม: ในกรณีนี้ การสั่นทางไฟฟ้าเทียบกับศักย์ดิน และภาระแรงดันที่เกิดขึ้น สามารถทำให้ระบบฉนวนของมอเตอร์เสียหายได้
- การใช้งานที่เคยเกิดความเสียหายของฉนวนที่รุนแรงกว่าในอดีต
- การใช้งานที่มีมาตรการตอบโต้อยู่แล้ว
สำหรับแรงดันบัส DC 600 V ถึง 720 V แรงดันพุ่งเกินระหว่างเฟสของมอเตอร์ต้องไม่เกิน 1370 V ย่านความต่างพีคถึงพีค (peak-to-peak) ระหว่างเฟสของมอเตอร์ต้องไม่เกิน 2800 V
การสะท้อนของสายและการสั่นทางไฟฟ้าเนื่องจากแหล่งจ่ายไฟแบบควบคุม จะซ้อนทับกันในการวัดระหว่างเฟสของมอเตอร์กับศักย์ดิน ควรพิจารณาเฉพาะย่านพีคถึงพีคในระหว่างการประเมิน ย่านพีคถึงพีคต้องไม่เกิน 2350 V
1.6.6 พฤติกรรมการลัดวงจรในมอเตอร์ซิงโครนัสแม่เหล็กถาวร
ในกรณีฉุกเฉิน การลัดวงจรของเฟส U, V และ W สามารถชะลอแกนที่ขับเคลื่อนด้วยมอเตอร์แรงบิดได้ การเบรกฉุกเฉินนี้สร้างกระแสลัดวงจร ขนาดและระยะเวลาของภาระกระแสต้องนำมาพิจารณาในการกำหนดขนาดของ PDS (power drive system) หากกระแสลัดวงจรสูงกว่ากระแสต่อเนื่องแบบระบายความร้อน Icw ต้องปรึกษา Schaeffler Industrial Drives พฤติกรรมการเบรกของมอเตอร์ถูกคำนวณจากความเร็วและโมเมนต์ความเฉื่อย
1.7 การระบายความร้อนและวงจรระบายความร้อน
1.7.1 การกระจายความร้อน
ชุดประกอบมอเตอร์ถ่ายทอดกำลังสูญเสียที่เกิดขึ้นระหว่างการทำงานของมอเตอร์ไปยังเครื่องจักร มาตรการการออกแบบที่นำมาใช้สำหรับการระบายความร้อน การพาความร้อน การนำความร้อน และการแผ่รังสี สามารถใช้เพื่อมีอิทธิพลและควบคุมการกระจายความร้อนของทั้งระบบได้ ความรู้เกี่ยวกับแหล่งความร้อนในมอเตอร์เป็นปัจจัยชี้ขาดสำหรับการออกแบบโครงสร้าง
ที่ความเร็วต่ำ และจึงมีความถี่การเปลี่ยนขั้ว < 100 Hz ความร้อนเกิดขึ้นจากการสูญเสียในทองแดงในขดลวดมอเตอร์เพียงอย่างเดียว ที่ความเร็วสูงขึ้น และจึงมีความถี่การเปลี่ยนขั้ว > 100 Hz การสูญเสียในเหล็กในโรเตอร์และสเตเตอร์ ตลอดจนการสูญเสียในแม่เหล็กในโรเตอร์ก็จะเกิดขึ้นด้วย การสูญเสียในเหล็กไม่ได้เพิ่มขึ้นเชิงเส้นกับความถี่การเปลี่ยนขั้ว และขึ้นอยู่กับมุมการลดสนาม (field weakening angle) และความหนาแน่นกระแส
ความร้อนส่วนใหญ่ที่เกิดขึ้นในการทำงานที่ความถี่การเปลี่ยนขั้ว < 100 Hz สามารถระบายออกได้ผ่านระบบระบายความร้อนด้วยของเหลวบนพื้นผิวด้านนอกของสเตเตอร์ ระบบระบายความร้อนแบบปลอกหุ้ม (jacket cooling) ที่เรียกกันนี้ ถูกต่อเข้ากับวงจรระบายความร้อนของชุดทำความเย็นซ้ำ (recooler) ปลอกหุ้มระบายความร้อนมักเป็นชิ้นส่วนโครงสร้างของการออกแบบเครื่องจักรเฉพาะของลูกค้า แต่ Schaeffler Industrial Drives ก็สามารถจัดหาให้แยกต่างหากได้เช่นกัน สื่อกลางระบายความร้อนไหลผ่านช่องเปิดในครีบระบายความร้อน — ที่เรียกว่าทางคดเคี้ยวระบายความร้อน (cooling meander) — ข้ามระดับต่าง ๆ จากทางเข้าไปยังทางออก ทางเข้าและทางออกสามารถกำหนดให้กับจุดต่อทั้งสองได้ตามต้องการ พื้นที่การไหลถูกผนึกออกสู่ภายนอกด้วยโอริง (O-rings)
สำหรับเครื่องจักรที่มีความหนาแน่นกำลังสูง ความเร็วสูง และจึงมีความถี่การเปลี่ยนขั้ว > 100 Hz การตอบสนองเชิงพลวัตที่ยอดเยี่ยม หรือความแม่นยำสูง Schaeffler Industrial Drives ยังแนะนำเพิ่มเติมให้ใช้ระบบควบคุมอุณหภูมิ (ทำความร้อนหรือทำความเย็น) สำหรับโครงสร้างโดยรอบหรือโรเตอร์ โดยทั่วไปจะใช้ตัวต่อร่วมแบบหมุน (rotary manifold) เพื่อระบายความร้อนตลับลูกปืนและโรเตอร์ การควบคุมอุณหภูมิของโครงสร้างโดยรอบช่วยลดการบิดเบี้ยวเชิงความร้อนของโครงสร้างเครื่องจักรและผลกระทบต่อแรงอัดล่วงหน้าของตลับลูกปืน จึงเพิ่มความแม่นยำ
แรงบิดต่อเนื่องของมอเตอร์แรงบิดที่มีการระบายความร้อนด้วยของเหลวที่สเตเตอร์ สูงกว่าการทำงานแบบไม่ระบายความร้อนได้ถึง 300 % เพื่อให้ได้แรงบิดต่อเนื่องที่สูง มอเตอร์แรงบิดจึงทำงานพร้อมการระบายความร้อนด้วยของเหลวในการใช้งานส่วนใหญ่
การออกแบบการระบายความร้อนของมอเตอร์ได้รับอิทธิพลจากปัจจัยต่อไปนี้:
- พื้นที่ติดตั้ง
- ความต้องการความแม่นยำ
- ความไวเชิงความร้อนของโครงสร้างโดยรอบ
- ความเร็วที่ต้องการ
1.7.2 สื่อกลางระบายความร้อนและผลกระทบต่อการระบายความร้อน
ข้อมูลในข้อมูลสมรรถนะอ้างอิงจากน้ำเป็นสื่อกลางระบายความร้อน อย่างไรก็ตาม น้ำต้องการสารเติมแต่งที่ป้องกันการกัดกร่อนและการสะสมทางชีวภาพในวงจรระบายความร้อน การใช้สื่อกลางระบายความร้อนที่แตกต่างจากน้ำอย่างมาก มีผลทำให้ปริมาณความร้อนที่ระบายออกได้ลดลง และจึงเปลี่ยนแปลงแรงบิดต่อเนื่องแบบระบายความร้อน Tcw ที่มีในการทำงานต่อเนื่องด้วย หากร้องขอ Schaeffler Industrial Drives สามารถช่วยกำหนดขนาดของการใช้งานและกำหนดข้อมูลมอเตอร์ที่ทำได้
สำหรับการกำหนดขนาดด้วยสื่อกลางระบายความร้อนเฉพาะของลูกค้า จำเป็นต้องมีข้อมูลต่อไปนี้:
- ชนิดและความหนาแน่น
- ความจุความร้อนจำเพาะ
- ความหนืดเชิงจลน์
- เอกสารข้อมูลทางเทคนิคพร้อมส่วนประกอบของสาร
หากใช้สื่อกลางระบายความร้อนที่มีความหนืดสูงกว่าน้ำอย่างมีนัยสำคัญ ต้องตรวจสอบผลกระทบต่อการระบายความร้อนก่อนใช้งาน พารามิเตอร์ของมอเตอร์ เช่น Icw eff หรือ Tcw อาจต้องปรับ ต้องใช้ข้อมูลของสื่อกลางที่ใช้ และต้องนำอุณหภูมิที่คาดว่าจะเกิดขึ้นมาพิจารณา
น้ำ
น้ำเป็นสื่อกลางระบายความร้อนที่ใช้กันมากที่สุด น้ำมีความจุความร้อนจำเพาะสูงและราคาถูก น้ำที่มีสารเติมแต่งที่ป้องกันการกัดกร่อนและการสะสมทางชีวภาพ เป็นที่นิยมกว่าสื่อกลางระบายความร้อนอื่นทั้งหมด สารเติมแต่ง เช่น COOL CONCENTRATE หรือ COOL X แทบไม่ส่งผลต่อคุณสมบัติ เช่น ความหนาแน่นและความหนืด น้ำที่มีสารเติมแต่งชนิดใดชนิดหนึ่งเหล่านี้เป็นสื่อกลางระบายความร้อนที่มีประสิทธิภาพสูงมาก ด้วยความจุความร้อนจำเพาะ 4.1 kJ/kg·K ค่านี้สอดคล้องกับค่าของน้ำโดยประมาณ
ตารางที่ 8: คุณสมบัติของวัสดุของน้ำ
| อุณหภูมิ | ความหนาแน่น 1) | ความจุความร้อนจำเพาะ | ความหนืดพลวัต | ความหนืดเชิงจลน์ |
|---|---|---|---|---|
| °C | kg/m³ | kJ/kg·K | Pa·s | mm²/s |
| +20 2) | 998,21 | 4,1840 | 0,0010014 | 1,00319572 |
| +25 | 997,05 | 4,1813 | 0,00088982 | 0,892452736 |
| +30 | 995,65 | 4,1798 | 0,00079705 | 0,800532316 |
1) ตามมาตรฐาน DIN 1306 เงื่อนไขรอง เช่น ความดันอากาศและความเร่งโน้มถ่วง มีค่า 1 g, ความดัน pn = 1.01325 bar
2) อุณหภูมิอ้างอิง
ส่วนผสมน้ำ–ไกลคอล
ส่วนผสมของน้ำและไกลคอลมีจุดเยือกแข็งต่ำกว่าน้ำ และป้องกันการกัดกร่อน ส่วนผสมนี้มักใช้สำหรับสภาพแวดล้อมที่เย็นหรือการใช้งานที่ต้องการการป้องกันน้ำแข็ง เนื่องจากความหนืดที่สูงกว่าของส่วนผสมน้ำ–ไกลคอลเมื่อเทียบกับน้ำบริสุทธิ์ จึงมีแรงดันตกในระบบท่อที่สูงกว่า ปั๊มหมุนเวียนต้องส่งความดันที่สูงขึ้นตามไปด้วย
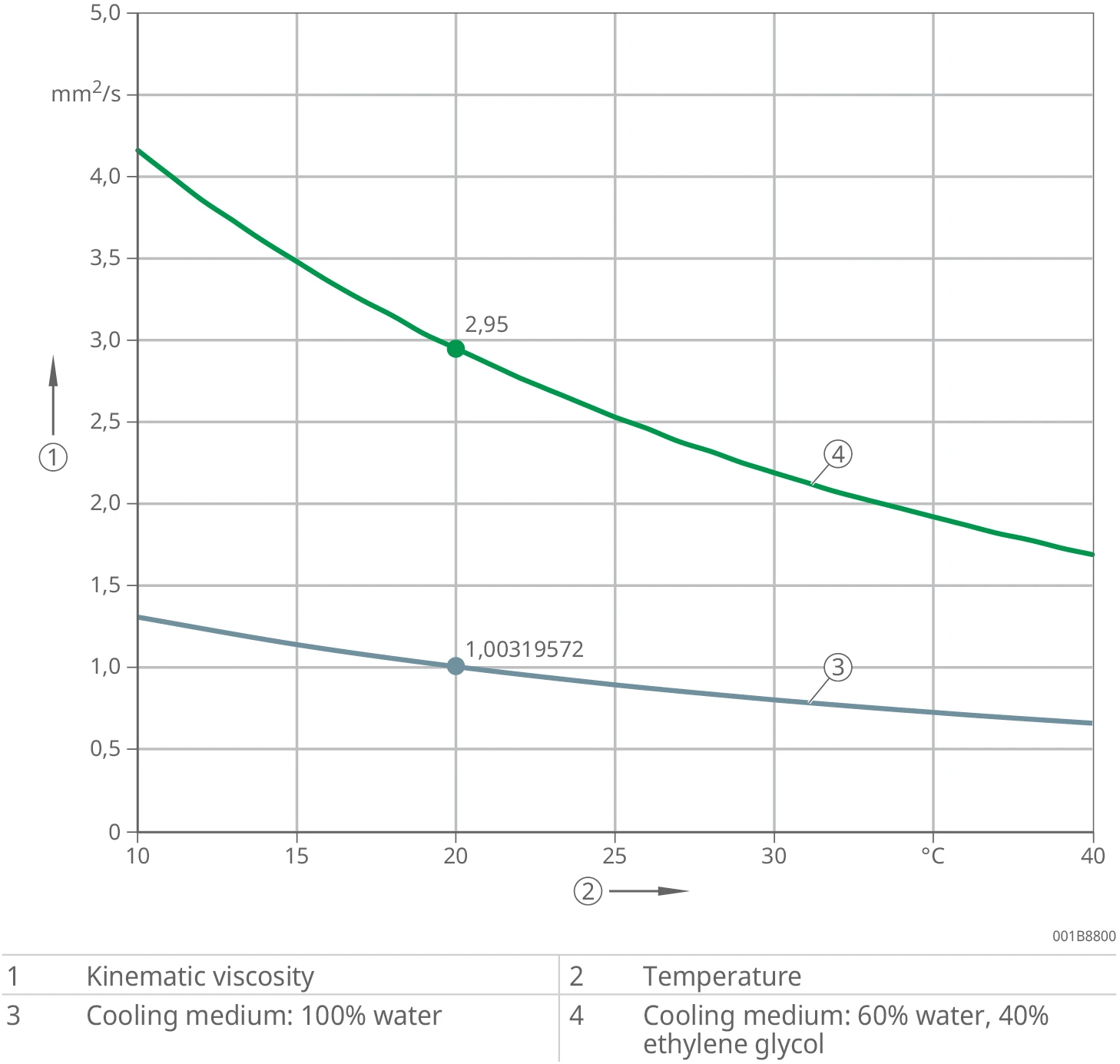
รูปที่ 10: ความสัมพันธ์ของความหนืดเชิงจลน์กับอุณหภูมิ แกนตั้งคือความหนืดเชิงจลน์ (mm²/s) แกนนอนคืออุณหภูมิ (°C) สองเส้นโค้ง: ③=สื่อกลางระบายความร้อนน้ำ 100% (1.00319572 ที่ 20 °C), ④=สื่อกลางระบายความร้อน น้ำ 60% + เอทิลีนไกลคอล 40% (2.95 ที่ 20 °C) นิยามสัญลักษณ์: ①=ความหนืดเชิงจลน์, ②=อุณหภูมิ
ตัวอย่าง
ส่วนผสมของเอทิลีนไกลคอล 40 % เช่น Antifrogen N และน้ำ 60 % มีจุดเยือกแข็งที่ −25 °C และความหนืดเชิงจลน์ที่สูงกว่าน้ำ 2.95 เท่า อัตราการไหลที่แนะนำสามารถทำได้ด้วยความดันที่สูงขึ้นอย่างมากเท่านั้น สามารถใช้ตัวประกอบแก้ไขสำหรับการประมาณคร่าว ๆ ได้
ตารางที่ 9: ตัวประกอบแก้ไขสำหรับเอทิลีนไกลคอล
| ความเข้มข้น | จุดเยือกแข็ง | ตัวประกอบแก้ไขสำหรับความต่างความดัน |
|---|---|---|
| % | °C | – |
| 20 | −9 | 1,14 |
| 30 | −16 | 1,23 |
| 40 | −25 | 1,33 |
| 44 | −30 | 1,38 |
ต้องยึดถือค่าที่แน่นอนสำหรับสื่อกลางระบายความร้อนที่ใช้เสมอ
น้ำมัน
น้ำมันถูกใช้เป็นสื่อกลางระบายความร้อนในการใช้งานอุตสาหกรรมบางประเภท การใช้งานเป็นตัวกำหนดว่าน้ำมันชนิดใดเหมาะสม หากใช้น้ำมัน ต้องบรรลุอัตราการไหลเชิงปริมาตรที่จำเป็นสำหรับการระบายความร้อนเสมอ หากร้องขอ Schaeffler Industrial Drives สามารถช่วยกำหนดขนาดได้ ลูกค้าต้องตรวจสอบความเข้ากันได้ทางเคมีของชิ้นส่วนทั้งหมด
1.7.3 อิทธิพลของข้อมูลพิกัดต่ออุณหภูมิจ่ายและสื่อกลางระบายความร้อน
กระแสต่อเนื่องสำหรับการทำงานแบบระบายความร้อน Icw eff ที่ระบุไว้ อ้างอิงจากอุณหภูมิจ่ายน้ำระบายความร้อนพิกัด ϑnf กระแสต่อเนื่อง Icw eff ถูกระบุไว้ในข้อมูลสมรรถนะ
อุณหภูมิจ่ายที่สูงขึ้น ϑf ลดความสามารถในการระบายความร้อน และจึงลดกระแสต่อเนื่องด้วย กระแสต่อเนื่องที่ลดลง Ic red ถูกคำนวณจากความสัมพันธ์กำลังสองต่อไปนี้:
สูตรที่ 2: กระแสต่อเนื่องที่ลดลง
Ic red / Icw eff = √(ϑmax − ϑf) / (ϑmax − ϑnf)
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Ic red | A | กระแสต่อเนื่องที่ลดลง |
| Icw eff | A | กระแสต่อเนื่องยังผล แบบระบายความร้อน |
| ϑmax | °C | อุณหภูมิขดลวดสูงสุดที่ยอมให้ได้ |
| ϑnf | °C | อุณหภูมิจ่ายพิกัด |
| ϑf | °C | อุณหภูมิจ่ายปัจจุบัน |
หากใช้สื่อกลางระบายความร้อนเฉพาะของลูกค้า ปริมาณความร้อนเหลือทิ้งที่ระบายออกได้ และจึงรวมถึงแรงบิดต่อเนื่องแบบระบายความร้อนที่มีในการทำงานต่อเนื่องด้วย จะเปลี่ยนแปลงไป หากร้องขอและระบุคุณสมบัติของสาร วิศวกรจาก Schaeffler Industrial Drives สามารถกำหนดผลกระทบของสื่อกลางระบายความร้อนที่ใช้ได้
รูปที่ 11: กระแสต่อเนื่องสัมพัทธ์ Ic red / Icw eff เป็นฟังก์ชันของอุณหภูมิจ่าย ϑf (ϑnf = +20 °C) แกนตั้งคือกระแสต่อเนื่องสัมพัทธ์ (%) แกนนอนคืออุณหภูมิจ่ายจริง ϑf (°C) เส้นโค้งอยู่ที่ 100% สำหรับ +20 °C และลดลงเมื่ออุณหภูมิสูงขึ้น นิยามสัญลักษณ์: ①=กระแสต่อเนื่องสัมพัทธ์ Ic red / Icw eff เป็น %, ②=อุณหภูมิจ่ายจริง ϑf, Ic red=กระแสต่อเนื่องที่ลดลง, Icw eff=กระแสต่อเนื่อง แบบระบายความร้อน, ϑnf=อุณหภูมิจ่ายพิกัด
1.8 การจัดวางมอเตอร์
1.8.1 การใช้งานมอเตอร์หลายตัวขนานกันบนแกนเดียว
การขับเคลื่อนแกนพร้อมกันด้วยมอเตอร์ซิงโครนัส 2 ตัวหรือมากกว่า มีความเหมาะสมในบางการใช้งาน การใช้งานดังกล่าวรวมถึงระบบหมุนแกน (pivot systems) ในศูนย์เครื่องจักรกล 5 แกน หัวกัดแบบส้อม (fork-type milling heads) หรือสปินเดิลเครื่องจักรสำหรับเครื่องกัดฟันเฟือง (hobbing machines) มอเตอร์ซิงโครนัสที่สร้างเหมือนกันซึ่งต่อขนานกัน สามารถใช้งานร่วมกันบนคอนเวอร์เตอร์ตัวเดียวได้ เฉพาะความเร็วต่ำเท่านั้นที่ให้คุณภาพการซิงโครไนซ์ที่น่าพอใจ หากมอเตอร์แรงบิดสองตัวทำงานขนานกันบนแกนเดียว ดังนั้นในทางปฏิบัติ จึงใช้เฉพาะมอเตอร์แรงบิดในซีรีส์ RIB สำหรับการทำงานแบบขนานเท่านั้น มอเตอร์แรงบิดซีรีส์ RIB ช้ากว่ามอเตอร์แรงบิดซีรีส์ RKIB
1.8.2 การจัดวางมอเตอร์
มีการแบ่งความแตกต่างระหว่างการจัดวางแบบแทนเด็ม (tandem) ขนานกัน กับการจัดวางแบบเจนัส (Janus) แบบขนานกลับด้าน กล่าวคือสะท้อนกระจก ของสเตเตอร์
การจัดแนวโรเตอร์
ในการทำงานแบบขนาน โรเตอร์ต้องถูกจัดแนวในตำแหน่งเชิงมุมเดียวกัน ไม่ว่าจะจัดวางแบบใด สามารถใช้เครื่องหมายบนโรเตอร์แต่ละตัวสำหรับการจัดแนวได้
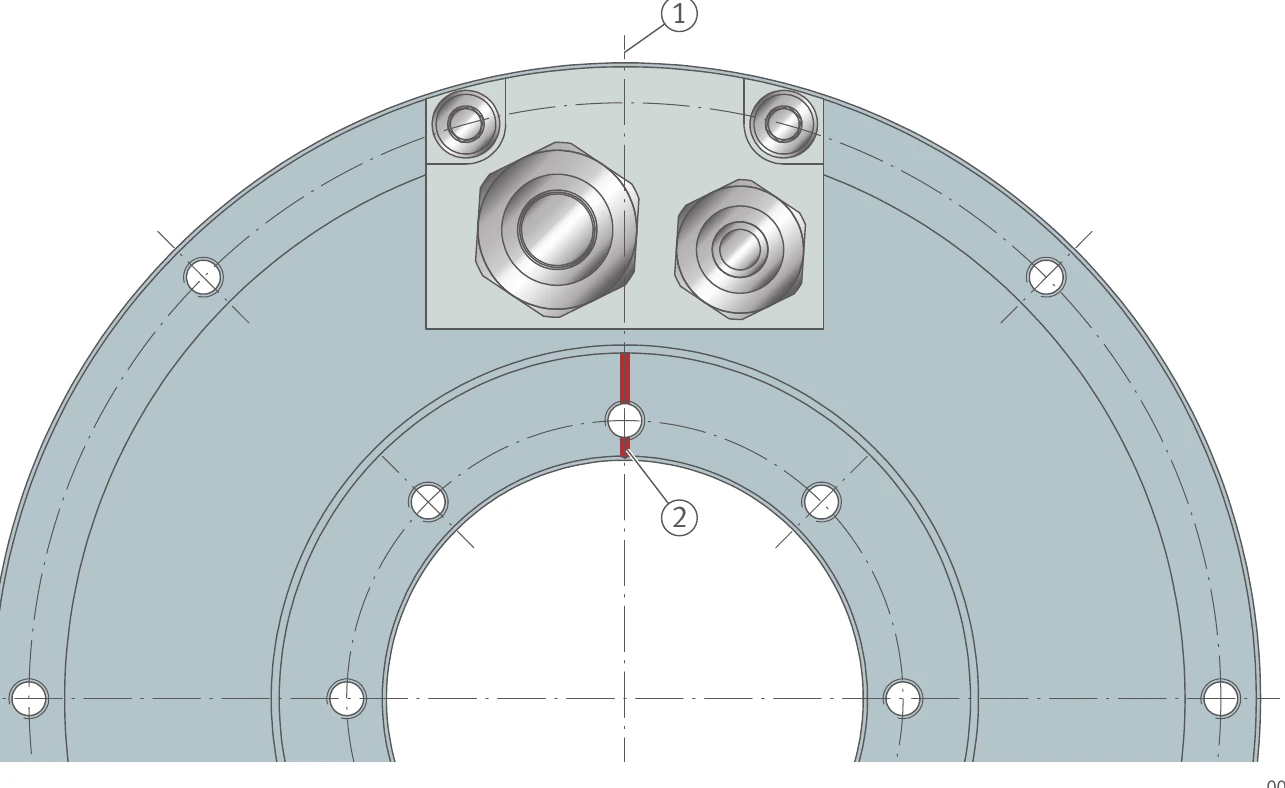
รูปที่ 12: แกนศูนย์และเครื่องหมายหมุนที่จัดแนวกัน ①=แกนศูนย์, ②=เครื่องหมายโรเตอร์
การจัดแนวสเตเตอร์
เป้าหมายคือการจัดแนวขดลวดของแต่ละเฟสในตำแหน่งเชิงมุมเดียวกัน สเตเตอร์สามารถจัดแนวได้โดยใช้แกนศูนย์ ในมอเตอร์ RIB มาตรฐานที่มีทางออกสายเดียว แกนศูนย์อยู่ระหว่างรูบนแคลมป์รัดสาย ในกรณีของทางออกสายเฉพาะของลูกค้าหรือทางออกสายหลายจุด ต้องปรึกษา Schaeffler Industrial Drives เพื่อกำหนดแกนศูนย์
ก่อนวางแผนการทำงานแบบขนาน ต้องติดต่อ Schaeffler Industrial Drives
การจัดวางแบบแทนเด็ม
ทางออกสายชี้ไปในทิศทางตามแนวยาวเดียวกัน
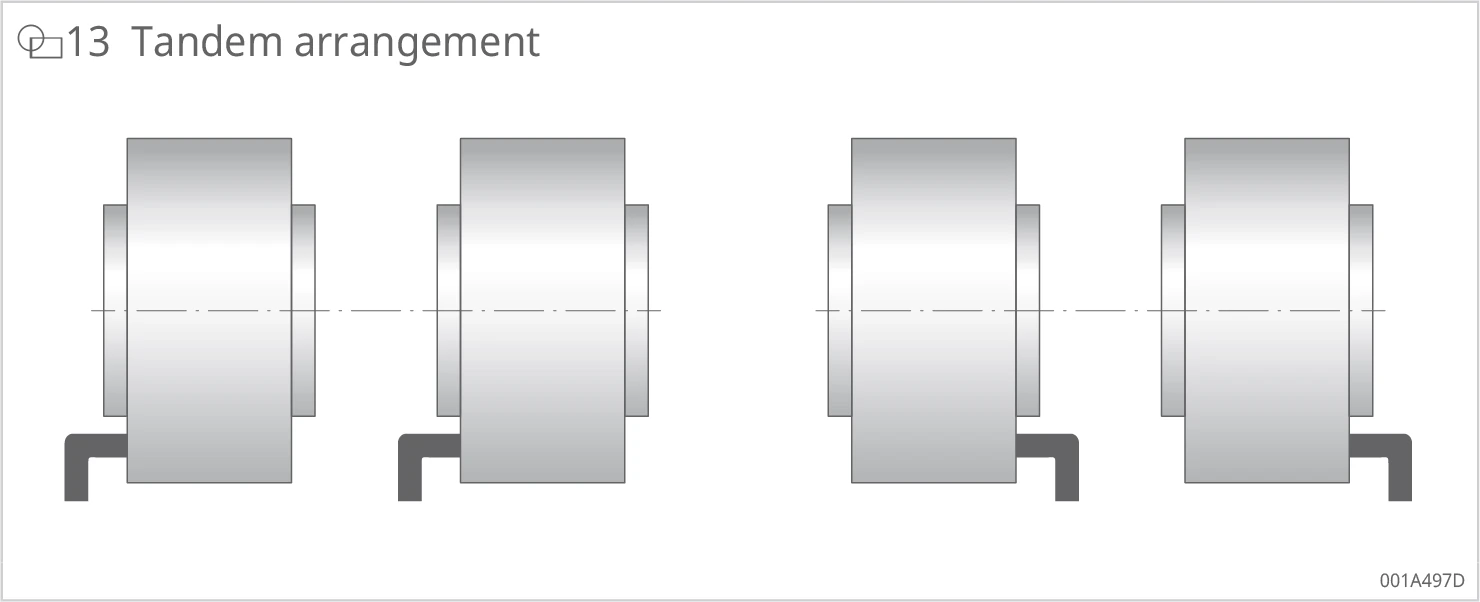
รูปที่ 13: การจัดวางแบบแทนเด็ม แผนผังของมอเตอร์สองคู่ที่มีทางออกสายชี้ไปในทิศทางตามแนวยาวเดียวกัน
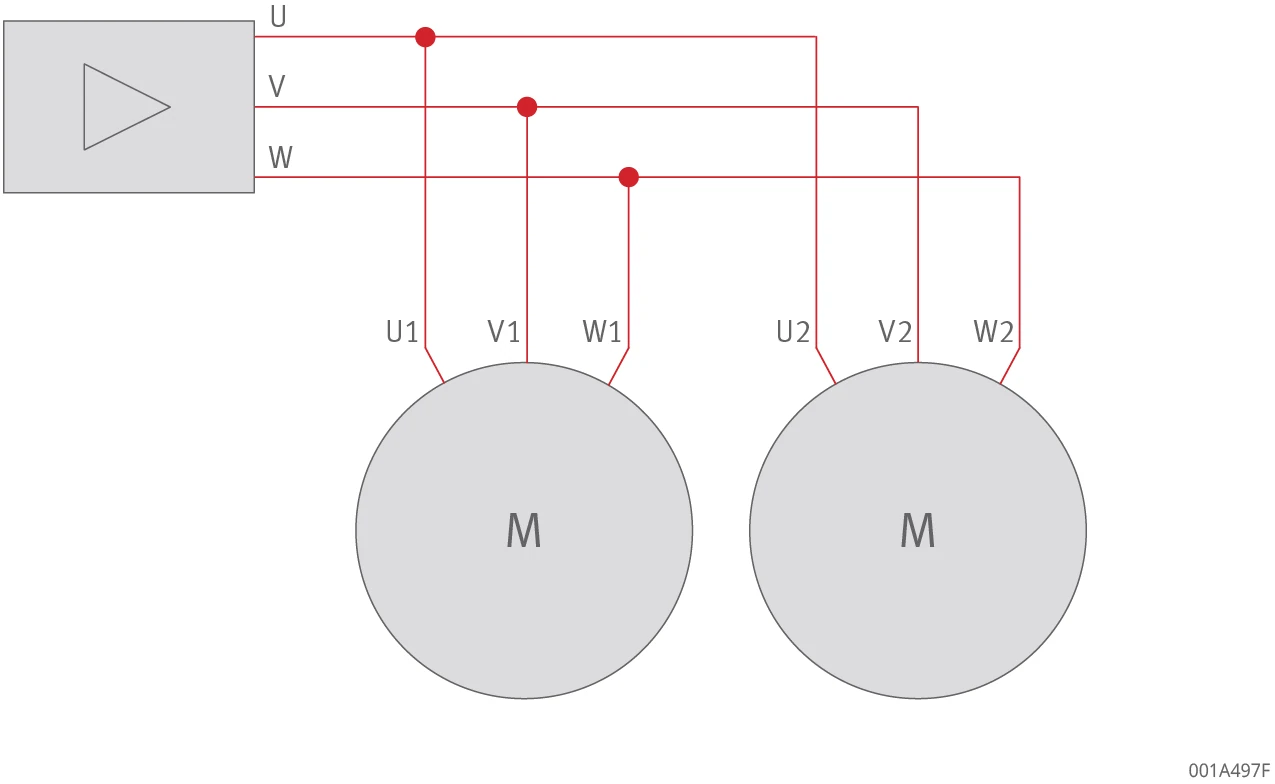
รูปที่ 14: แผนภาพการเดินสายของการจัดวางแบบแทนเด็ม เฟส U, V, W ของคอนเวอร์เตอร์ถูกต่อตามลำดับเข้ากับขั้ว U1/V1/W1 และ U2/V2/W2 ของมอเตอร์ M ทั้งสองตัว (เฟสชื่อเดียวกันต่อร่วมกัน)
แกนศูนย์ของสเตเตอร์ก็ถูกจัดแนวให้ตรงกับทางออกสายด้วย ในกรณีของทางออกสายร่วมแกนแบบเรียบเสมอกัน วงกลมสลักเกลียว (bolt circles) ต้องจัดวางแบบร่วมศูนย์ และจุดต่อเฟสที่มีชื่อเดียวกันต้องเรียงตรงกัน
การจัดวางแบบเจนัส
ทางออกสายชี้ไปในทิศทางตามแนวยาวที่ตรงข้ามกัน
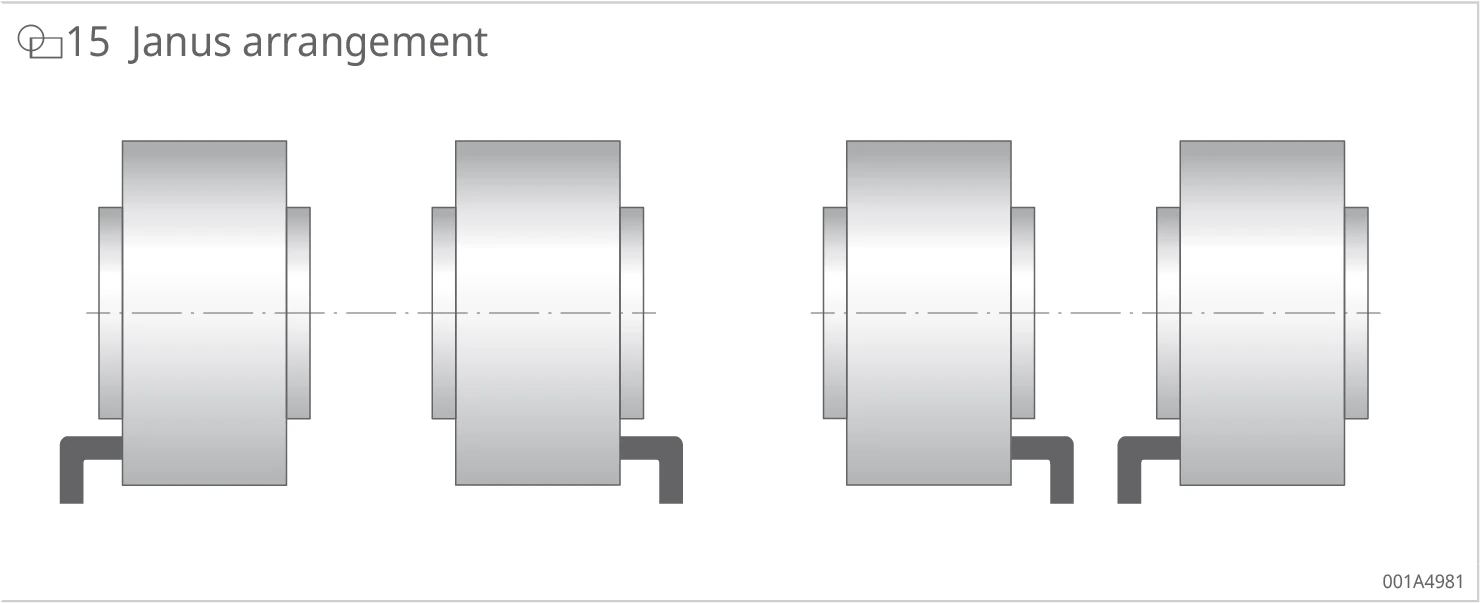
รูปที่ 15: การจัดวางแบบเจนัส แผนผังของมอเตอร์สองคู่ที่มีทางออกสายชี้ไปในทิศทางตามแนวยาวที่ตรงข้ามกัน
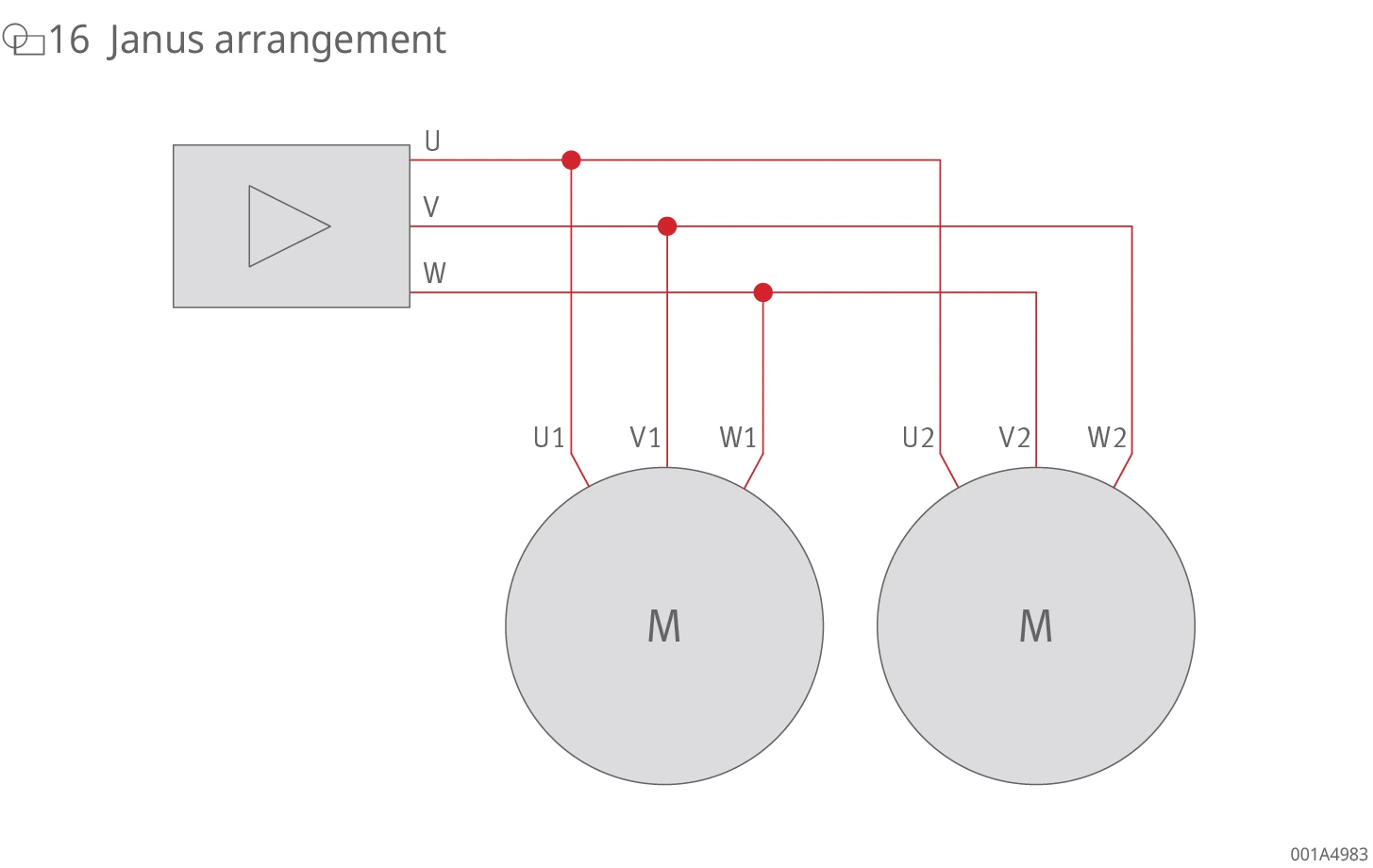
รูปที่ 16: แผนภาพการเดินสายของการจัดวางแบบเจนัส เฟส U, V, W ของคอนเวอร์เตอร์ถูกต่อเข้ากับมอเตอร์ M ทั้งสองตัว โดยสลับเฟส V และ W ของมอเตอร์ตัวหนึ่ง เพื่อให้ได้การทำงานแบบสะท้อนกระจก
แกนศูนย์ก็ต้องตรงกันในการจัดวางแบบเจนัสที่สะท้อนกระจกด้วย ขึ้นอยู่กับตำแหน่งของแกนศูนย์ อาจจำเป็นต้องเลื่อนวงกลมสลักเกลียว มอเตอร์ในการจัดวางแบบสะท้อนกระจกต้องทำงานในทิศทางการหมุนที่ตรงข้ามกัน เพื่อการนี้ เฟส V และ W จึงถูกสลับกันบนมอเตอร์ตัวใดตัวหนึ่งในสองตัว ผลที่ได้คือ เฟส U1 และ U2, V1 และ W2 และ W1 และ V2 ถูกต่อร่วมกันเข้ากับคอนเวอร์เตอร์
1.9 การใช้งานมอเตอร์หลายตัวขนานกันบนแกนเดียว
1.9.1 การเลื่อนตำแหน่งทางออกสาย
ในทุกการจัดวาง สเตเตอร์และจึงรวมถึงทางออกสาย สามารถบิดเทียบกันได้เป็นขั้น ๆ ที่มีขนาดหนึ่ง โดยเฉพาะในการจัดวางแบบเจนัสที่มีทางออกสายภายใน เป็นไปได้ที่จะออกแบบให้แกนโดยรวมสั้นลงด้วยการบิดสเตเตอร์ ขนาดของขั้นสอดคล้องกับคู่ขั้วหนึ่งคู่ และต้องคูณด้วยตัวประกอบที่เป็นจำนวนเต็ม
มุมบิดถูกคำนวณดังต่อไปนี้:
สูตรที่ 3: มุมบิด
Torsion angle = ( 360° / Number of pole pairs ) · x
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| x | – | ตัวประกอบที่เป็นจำนวนเต็มใด ๆ |
ในบางซีรีส์ ยังสามารถได้มุมบิดที่เหมาะสมในวงกลมสลักเกลียวด้วย เช่น RIB11-3P-230xH:
สูตรที่ 4: มุมบิดในวงกลมสลักเกลียว
Torsion angle = ( 360° / 22 ) · 11 = 180°
1.9.2 การตั้งค่าให้เฟสตรงกัน
ในทุกกรณี ควรตรวจสอบว่ามอเตอร์ที่ขนานกันถูกจัดแนวให้ตรงเฟสกันหรือไม่ หากเฟสไม่ตรงกัน จะเกิดการลดลงของค่าคงที่แรงบิดและประสิทธิภาพที่ขึ้นกับความเร็ว เนื่องจากกระแสลัดวงจรที่ถูกเหนี่ยวนำ
การจัดแนวเฟสทำได้ผ่านการวัดแรงเคลื่อนไฟฟ้าย้อนกลับ (back EMF) ของมอเตอร์ ด้วยออสซิลโลสโคปสองช่องสัญญาณ พร้อมการหมุนโรเตอร์ที่ต่อกันไว้ไปพร้อมกัน เพื่อให้ได้การทำงานเชิงสถิตที่ดีของมอเตอร์ที่เชื่อมต่อกัน ความต่างเฟสระหว่างเส้นโค้งทั้งสองต้องไม่เกิน ±5° การปรับเชิงกลของโรเตอร์หรือสเตเตอร์สามารถหักล้างความต่างเฟสทางไฟฟ้าที่มีอยู่ระหว่างมอเตอร์ได้
โดยมีความสัมพันธ์ดังต่อไปนี้:
สูตรที่ 5: ทฤษฎีบทมุมเชิงกล
Mechanical angle set = Phase offset / Number of pole pairs
เมื่อติดตั้งอย่างถูกต้อง ช่องว่างในข้อต่อสลักเกลียวของวงกลมสลักเกลียวที่สอดคล้องกับชั้นพิกัดความเผื่อระดับกลาง EN 20273 เพียงพอสำหรับการปรับละเอียด หากมีมอเตอร์มากกว่าสองตัวต่อขนานกัน จะกำหนดให้ตัวหนึ่งเป็นตัวหลัก (master) และจึงเป็นจุดอ้างอิงสำหรับการจัดแนวมอเตอร์ที่เหลือทั้งหมด
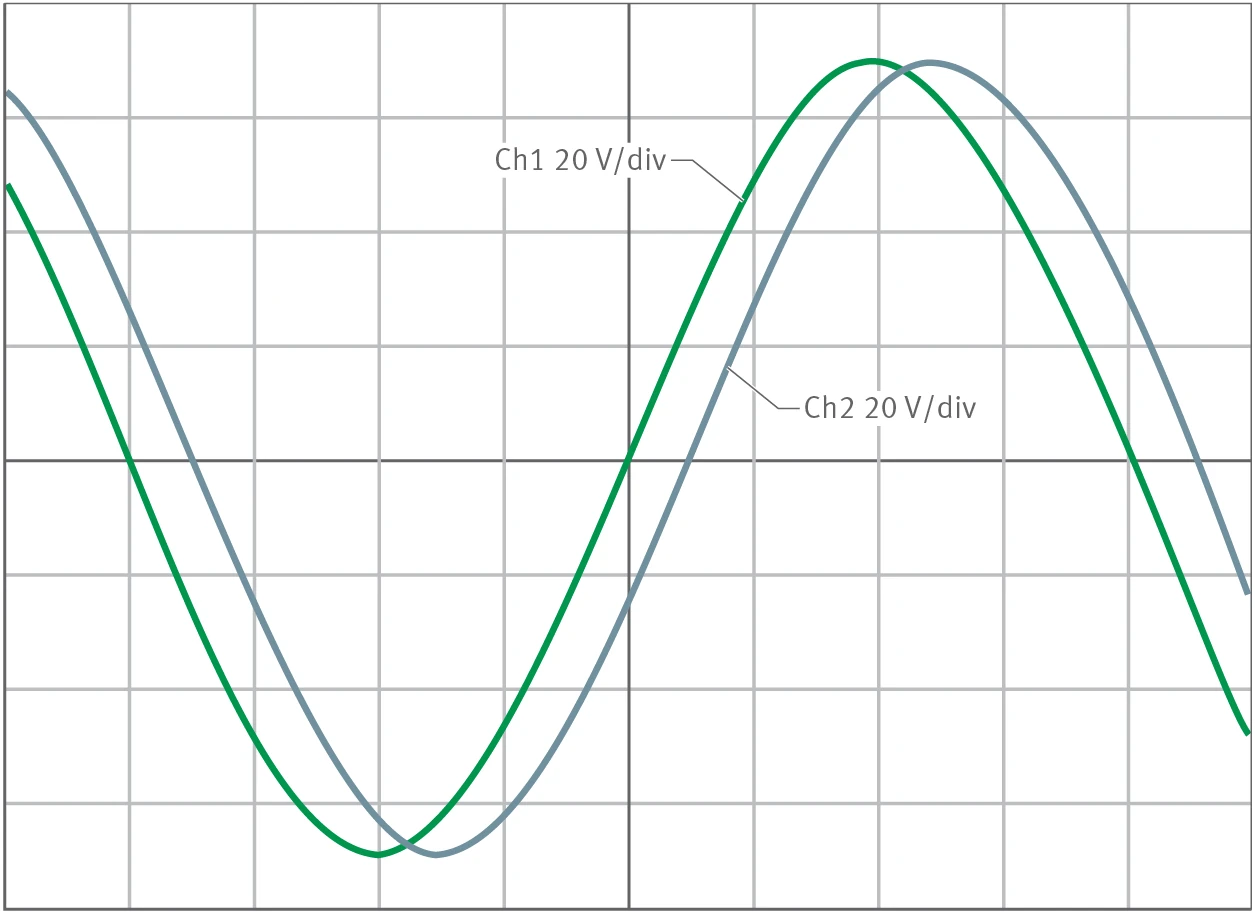
รูปที่ 17: ความต่างเฟส 22.5° ระหว่างแรงเคลื่อนไฟฟ้าย้อนกลับ ออสซิลโลสโคปสองช่องสัญญาณแสดงความต่างเฟสระหว่างเส้นโค้งแรงเคลื่อนไฟฟ้าย้อนกลับสองเส้น (Ch1 20 V/div, Ch2 20 V/div)
1.9.3 การประเมินเซ็นเซอร์อุณหภูมิ
การจัดแนวมอเตอร์เทียบกันที่ไม่ถูกต้องหรือไม่แม่นยำ อาจทำให้เกิดการโอเวอร์โหลดเชิงความร้อนของมอเตอร์ เซ็นเซอร์ PTC ที่ติดตั้งอยู่ทำหน้าที่ปกป้องมอเตอร์ เซ็นเซอร์ PTC สำหรับมอเตอร์แต่ละตัวในการจัดวาง ถูกต่ออนุกรมกันและประเมินโดยรีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์
เพื่อป้องกันการทริปของระบบป้องกันมอเตอร์ก่อนเวลาอันควร Schaeffler Industrial Drives แนะนำให้ใช้รีเลย์ป้องกันมอเตอร์แบบเทอร์มิสเตอร์หลายตัวหรือแบบหลายช่องสัญญาณ ในกรณีที่มีวงจรเฝ้าตรวจ PTC ตั้งแต่สามวงจรขึ้นไป
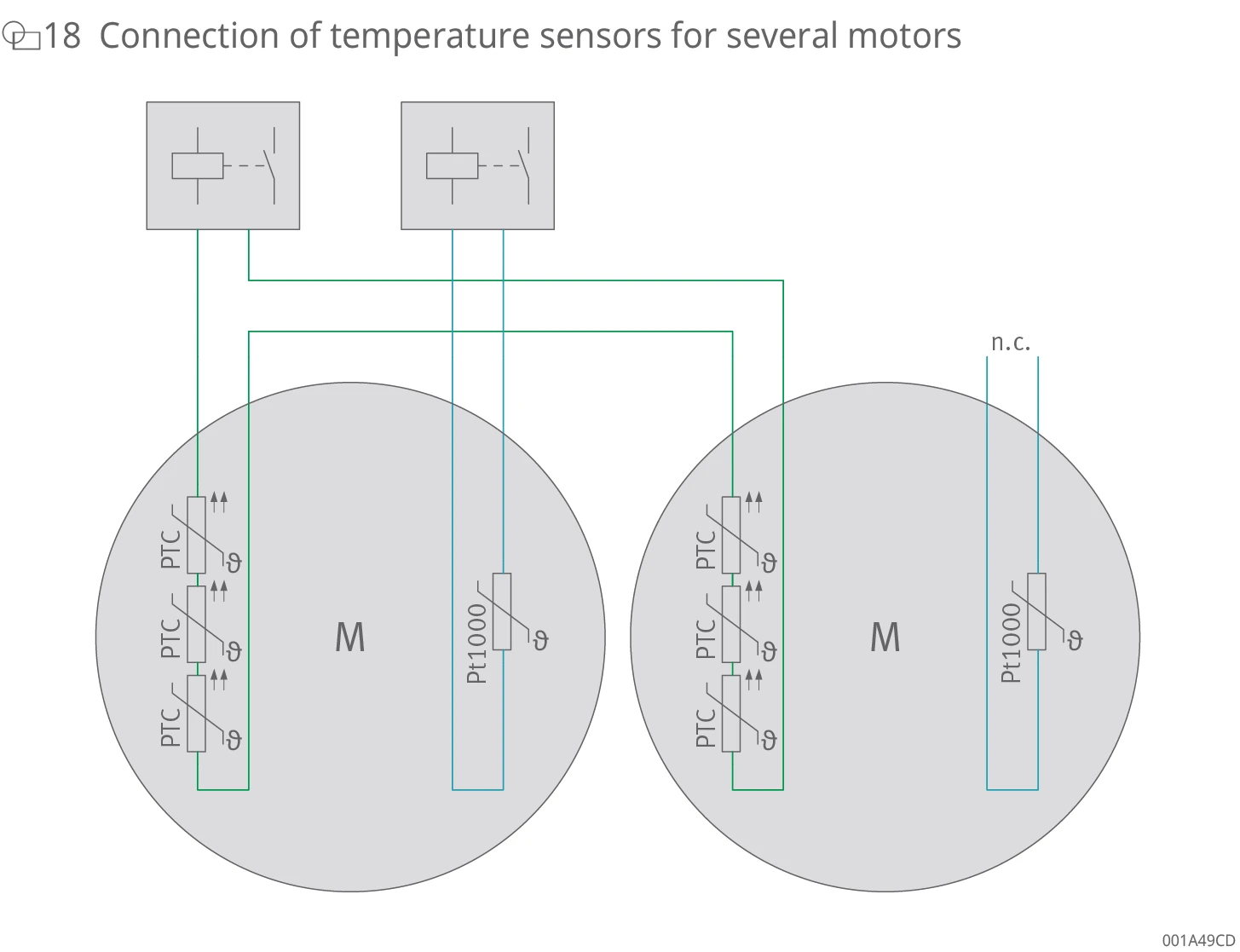
รูปที่ 18: การต่อเซ็นเซอร์อุณหภูมิสำหรับมอเตอร์หลายตัว PTC (ต่ออนุกรม) ของมอเตอร์ M สองตัว ถูกต่อเข้ากับรีเลย์ป้องกันมอเตอร์ โดยมอเตอร์แต่ละตัวยังมีเซ็นเซอร์ Pt1000 ด้วย (ตัวหนึ่งทำเครื่องหมาย n.c. ไม่ได้ต่อ)
1.9.4 ข้อมูลมอเตอร์ที่ได้
การต่อขนานของมอเตอร์เดี่ยวที่มีโครงสร้างเหมือนกัน ส่งผลให้ได้ข้อมูลทางไฟฟ้าใหม่สำหรับคอนเวอร์เตอร์ในมอเตอร์ทดแทนปัจจุบัน ข้อมูลทางไฟฟ้าเหล่านี้สามารถกำหนดได้ง่ายจากข้อมูลต่อไปนี้สำหรับมอเตอร์เดี่ยว:
- จำนวนคู่ขั้ว ค่าคงที่แรงบิด ค่าคงที่แรงดัน ค่าคงที่เวลา และความเร็ว ยังคงไม่เปลี่ยนแปลง
- กระแส แรงบิด และค่าคงที่การหน่วง คูณด้วยจำนวนมอเตอร์เดี่ยว
- ความต้านทานและความเหนี่ยวนำ หารด้วยจำนวนมอเตอร์เดี่ยว
1.10 การเลือกชุดขับเคลื่อนตรงสำหรับการใช้งานแบบหมุน
1.10.1 การใช้งานแบบวัฏจักร
การทำงานแบบวัฏจักรประกอบด้วยการเคลื่อนที่ปรับตำแหน่งที่ต่อเนื่องกัน โดยมีช่วงหยุดการเคลื่อนที่คั่นระหว่างกลาง การปรับตำแหน่งอย่างง่ายอยู่ในรูปแบบของการเคลื่อนที่ที่มีความเร่งเชิงบวกและการเบรกตามมา หากค่าความเร่งเชิงลบเท่ากัน เวลาเร่งและเวลาเบรกก็จะเท่ากัน ความเร็วเชิงมุมสูงสุด ωmax เกิดขึ้นเมื่อสิ้นสุดช่วงการเร่ง
วัฏจักรหนึ่งถูกอธิบายในไดอะแกรม ω-t ไดอะแกรม ω-t สำหรับการทำงานแบบวัฏจักรแสดงการหมุนไปข้างหน้า/ถอยหลังพร้อมช่วงหยุด
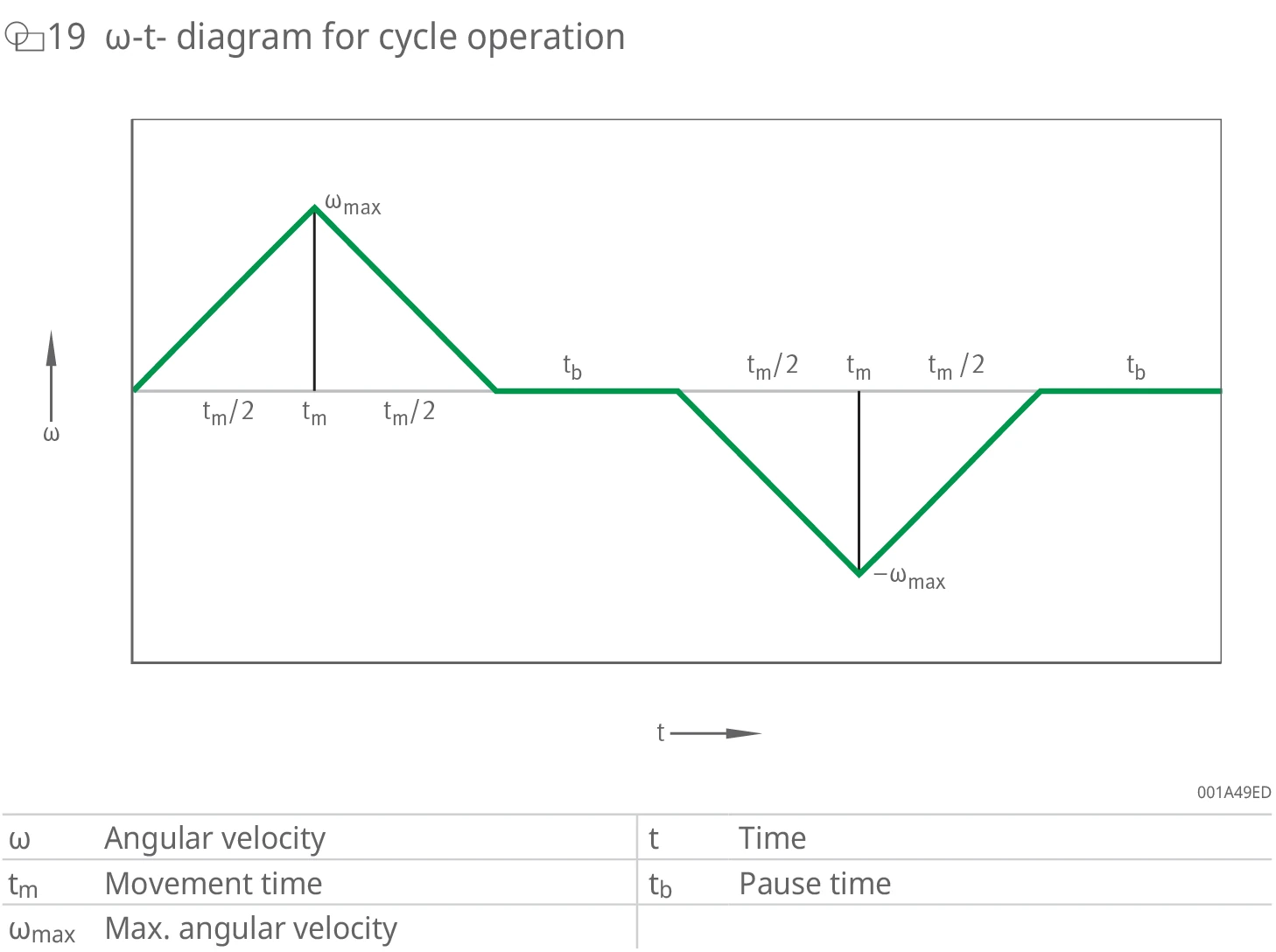
รูปที่ 19: ไดอะแกรม ω-t สำหรับการทำงานแบบวัฏจักร แกนตั้งคือความเร็วเชิงมุม ω แกนนอนคือเวลา t แสดงการหมุนไปข้างหน้า/ถอยหลังพร้อมช่วงหยุด ทำเครื่องหมายเวลาการเคลื่อนที่ tm, เวลาหยุดพัก tb และความเร็วเชิงมุมสูงสุด ωmax นิยามสัญลักษณ์: ω=ความเร็วเชิงมุม, tm=เวลาการเคลื่อนที่, ωmax=ความเร็วเชิงมุมสูงสุด, t=เวลา, tb=เวลาหยุดพัก
ไดอะแกรม α-t สำหรับการทำงานแบบวัฏจักรและเส้นโค้งของแรงบิดที่ต้องใช้สำหรับการเคลื่อนที่ ได้มาจากการหมุนไปข้างหน้า/ถอยหลังพร้อมช่วงหยุด:
สูตรที่ 6: แรงบิด
T = J · α
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| T | Nm | แรงบิด |
| J | kg·m² | โมเมนต์ความเฉื่อยเชิงมวล |
| α | rad/s² | ความเร่งเชิงมุม |
การเลือกมอเตอร์ดำเนินการบนพื้นฐานของเกณฑ์สามข้อต่อไปนี้ ตามโปรไฟล์แรงบิดสำหรับวัฏจักรที่ต้องการ:
- แรงบิดสูงสุดในวัฏจักร ≤ Tp ตามข้อมูลสมรรถนะ
- แรงบิดยังผลในวัฏจักร ≤ Tc (มอเตอร์ไม่ระบายความร้อน) หรือ Tcw (ระบายความร้อนด้วยน้ำ) ตามข้อมูลสมรรถนะ
- ความเร็วสูงสุดในวัฏจักร ≤ nlp ตามข้อมูลสมรรถนะ
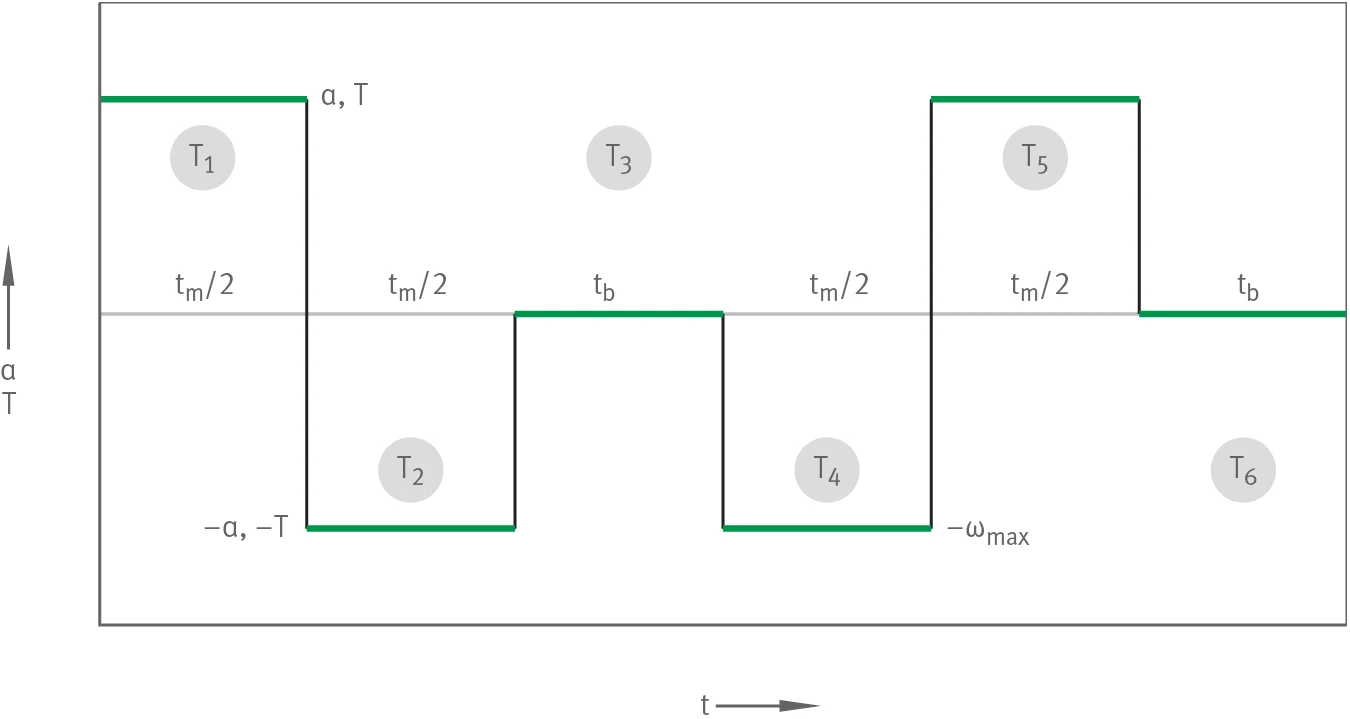
รูปที่ 20: ไดอะแกรม α-t สำหรับการทำงานแบบวัฏจักร แกนตั้งคือความเร่งเชิงมุม α และแรงบิด T แกนนอนคือเวลา t แสดงแรงบิดหกขั้น T1–T6 นิยามสัญลักษณ์: α=ความเร่งเชิงมุม, tm=เวลาการเคลื่อนที่, ωmax=ความเร็วเชิงมุมสูงสุด, t=เวลา, tb=เวลาหยุดพัก, T=แรงบิด, T1=แรงบิดขั้นที่ 1 (T1=T), T2=แรงบิดขั้นที่ 2 (T2=−T), T3=แรงบิดขั้นที่ 3 (T3=0), T4=แรงบิดขั้นที่ 4 (T4=−T), T5=แรงบิดขั้นที่ 5 (T5=T), T6=แรงบิดขั้นที่ 6 (T6=0)
แรงบิดยังผลเท่ากับรากที่สองของค่าเฉลี่ยกำลังสอง (root mean square) ของโปรไฟล์แรงบิดที่ประกอบด้วยแรงบิดหกขั้นในวัฏจักร
สูตรที่ 7: แรงบิดยังผล
Teff = √(T12·t1 + T22·t2 + … + T62·t6) / (t1 + t2 + … + t6)
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Teff | Nm | แรงบิดยังผล |
| T1 | Nm | แรงบิดขั้นที่ 1, T1 = T |
| t1 | s | เวลาการเคลื่อนที่ 1, t1 = tm/2 |
| T2 | Nm | แรงบิดขั้นที่ 2, T2 = −T |
| t2 | s | เวลาการเคลื่อนที่ 2, t2 = tm/2 |
| T6 | Nm | แรงบิดขั้นที่ 6, T6 = 0 |
| t6 | s | เวลาการเคลื่อนที่ 6, t6 = tb |
เราแนะนำตัวประกอบความปลอดภัย 1.4 สำหรับแรงบิด ตัวประกอบความปลอดภัยนี้คำนึงถึงเงื่อนไขต่าง ๆ เช่น การทำงานของมอเตอร์ในช่วงไม่เชิงเส้นของเส้นโค้งคุณลักษณะแรงบิด–กระแส ซึ่งสมการการคำนวณสำหรับ Teff ใช้ได้เฉพาะโดยประมาณเท่านั้น
แรงบิดยังผลสามารถคำนวณได้ด้วยแรงบิดต่อไปนี้:
- T1 = T
- T2 = −T
- T3 = 0
- T4 = −T
- T5 = T
- T6 = 0
แรงบิดยังผลสามารถคำนวณได้ด้วยเวลาต่อไปนี้:
- t1 = tm/2
- t2 = tm/2
- t3 = tb
- t4 = tm/2
- t5 = tm/2
- t6 = tb
สูตรที่ 8: แรงบิดยังผล
Teff = T · √tm / (tm + tb)
สูตรที่ 9: แรงบิดยังผล
Teff = J · α · √tm / (tm + tb)
หากในวัฏจักรมีเฉพาะแรงบิดที่มีขนาดเท่ากันเท่านั้นที่มีผล สมการนี้ใช้กับแรงบิดยังผล (สูตรที่ 9) โมเมนต์ความเฉื่อยเชิงมวลและความเร่งเชิงมุมเป็นค่าคงที่ เวลาการเคลื่อนที่หารด้วยผลรวมของเวลาการเคลื่อนที่และเวลาหยุดพัก อยู่ใต้เครื่องหมายราก เวลาวัฏจักรรวมอยู่ในตัวส่วน
ความเร่งเชิงมุม ความเร็วเชิงมุมสูงสุด และความเร็วรอบสูงสุดของการเคลื่อนที่ปรับตำแหน่ง สามารถคำนวณได้ด้วยสมการต่อไปนี้:
สูตรที่ 10: ความเร่งเชิงมุม
α = (4 · φ) / tm2
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| α | rad/s² | ความเร่งเชิงมุม |
| φ | ° | มุมการเคลื่อนที่ |
| tm | s | เวลาการเคลื่อนที่ |
สูตรที่ 11: ความเร็วเชิงมุมสูงสุด
ωmax = (2 · φ) / tm
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| tm | s | เวลาการเคลื่อนที่ |
สูตรที่ 12: ความเร็วสูงสุด
nmax = (30 / π) · ωmax
วิธีการคำนวณที่แสดงไว้ที่นี่เป็นแบบอุดมคติและถูกทำให้ง่ายขึ้น ตัวอย่างเช่น การเพิ่มขึ้นของความเร่งเชิงมุมมีค่าสูงเป็นอนันต์ ในทางปฏิบัติ ความเร่งเชิงมุมถูกจำกัดโดยความเหนี่ยวนำของมอเตอร์หรือชิ้นส่วนอื่น ๆ ตัวประกอบความปลอดภัย หรือในกรณีของการเคลื่อนที่ที่มีพลวัตสูง เวลาเพิ่มเติม 15 ms ถึง 20 ms ต่อการปรับตำแหน่งหนึ่งครั้ง ถูกนำมาใช้เพื่อคำนึงถึงผลกระทบเหล่านี้ในการออกแบบ
1.10.2 ตัวอย่างการใช้งานแบบวัฏจักร
ตารางที่ 10: ค่าที่กำหนด
| ค่าที่กำหนด | หน่วย | ค่า |
|---|---|---|
| มุมการเคลื่อนที่ φ | ° | 180 |
| เวลาการเคลื่อนที่ tm | s | 0,5 |
| เวลาวัฏจักร tm + tb | s | 1,35 |
| โมเมนต์ความเฉื่อยเชิงมวล J | kg·m² | 2,5 |
| แรงบิดเสียดทาน TF | Nm | 8 |
| ตัวประกอบความปลอดภัย SF | – | 1,4 |
การคำนวณ
การแปลงมุมการเคลื่อนที่:
สูตรที่ 13: การแปลงมุมการเคลื่อนที่
φ = (π / 180) · 180 rad = 3,142 rad
ความเร็วเชิงมุมสูงสุด:
สูตรที่ 14: ความเร็วเชิงมุมสูงสุด
ωmax = (2 · φ) / tm = (2 · 3,142) / 0,5 rad/s = 12,57 rad/s
ความเร็วสูงสุด:
สูตรที่ 15: ความเร็วสูงสุด
nmax = (30 / π) · ωmax = (30 / π) · 12,57 1/s = 120 min⁻¹
ความเร่งเชิงมุม:
สูตรที่ 16: ความเร่งเชิงมุม
α = (4 · φ) / tm2 = (4 · 3,142) / 0,52 rad/s² = 50,27 rad/s²
เมื่อคำนึงถึงแรงบิดเสียดทานของตลับลูกปืน TF แรงบิดสูงสุดได้มาดังต่อไปนี้:
สูตรที่ 17: แรงบิดสูงสุด
Tmax = (J · α) + TF = (2,5 · 50,27) + 8 = 133,68 Nm
แรงบิดยังผล เมื่อคำนึงถึงแรงบิดเสียดทานของตลับลูกปืน TF:
สูตรที่ 18: แรงบิดยังผล เมื่อคำนึงถึงแรงบิดเสียดทานของตลับลูกปืน
Teff = ( J · α · √tm / (tm + tb) ) + TF = ( 2,5 · 50,27 · √0,5 / 1,35 ) + 8 = 84,48 Nm
เมื่อคำนึงถึงตัวประกอบความปลอดภัย SF มอเตอร์ถูกเลือกตามความต้องการต่อไปนี้:
Tsafe max = Tmax × 1,4 ≤ TP
Tsafe eff = Teff × 1,4 ≤ Tcw
nmax ≤ nlp
ตัวประกอบความปลอดภัยสำหรับความเร็วจำเป็นเฉพาะเมื่อใช้อินเวอร์เตอร์ความถี่ที่มีแรงดันบัส DC ไม่เสถียรเท่านั้น ในกรณีปัจจุบัน ใช้อินเวอร์เตอร์ความถี่ที่มีแรงดันบัส DC เสถียร UDCL = 600 V ดังนั้นจึงอนุญาตให้ทำงานโดยไม่มีตัวประกอบความปลอดภัยสำหรับความเร็ว และใช้ nmax ≤ nlp หาก nmax > nlp สามารถตรวจสอบจุดทำงาน Tsafe max ที่ nmax ได้โดยใช้เส้นโค้งคุณลักษณะแรงบิด–ความเร็วที่แรงดันบัส DC ที่สอดคล้องกัน
การคำนวณส่งผลให้ได้ความต้องการมอเตอร์ต่อไปนี้:
โดยไม่มีตัวประกอบความปลอดภัย:
- Tp = 133,68 Nm
- Tcw = 84,48 Nm
พร้อมตัวประกอบความปลอดภัย:
- Tsafe max = 187,15 Nm
- Tsafe eff = 118,27 Nm
มอเตอร์ RIB17-3P-168x50-Z0.7 (Tp = 233 Nm, Tcw = 123 Nm, nlp = 150 min⁻¹) ตอบสนองความต้องการในตัวอย่างการคำนวณได้อย่างครบถ้วน
1.10.3 การใช้งานโต๊ะหมุน NC
สำหรับการใช้งานโต๊ะหมุนแบบระบายความร้อนด้วยน้ำ ความเร็ว n, โมเมนต์ความเฉื่อย J, แรงบิดในการประมวลผลขณะเคลื่อนที่ TW และแรงบิดหยุดนิ่ง Tsw ตลอดจนความเร่งเชิงมุม α ในการทำงานแบบ S1 และ αmax ในการทำงานแบบ S6 มักเป็นที่ทราบอยู่แล้ว แม้ว่าเวลายังผลของแรงบิดจะเปลี่ยนแปลงบ่อยครั้ง แต่การกำหนดแรงบิดยังผลเป็นแรงบิดต่อเนื่องและแรงบิดสูงสุดให้แม่นยำที่สุดเท่าที่จะเป็นไปได้ มีความจำเป็นเพื่อเลือกมอเตอร์ที่เหมาะสมที่สุด และเพื่อป้องกันการเกินอุณหภูมิขดลวดสูงสุดที่ยอมให้ได้
แรงบิดภาระทั้งหมดที่เกิดขึ้นระหว่างการทำงานของมอเตอร์ ถูกนำมารวมในการคำนวณแรงบิด
1.10.4 ตัวอย่างการใช้งานโต๊ะหมุน NC
ตารางที่ 11: ค่าที่กำหนด
| ค่าที่กำหนด | หน่วย | ค่า |
|---|---|---|
| ความเร็ว n | min⁻¹ | 60 |
| โมเมนต์ความเฉื่อยเชิงมวล J | kg·m² | 4 |
| แรงบิดในการประมวลผล TW | Nm | 300 |
| แรงบิดเสียดทาน TF | Nm | 50 |
| แรงน้ำหนัก (แรงบิดเพิ่มเติม) TZ | Nm | 0 |
| ความเร่งเชิงมุมในโหมด S1 αS1 | °/s² | 9000 |
| ความเร่งเชิงมุมสูงสุดในการทำงานแบบ S6 เป็นเวลา 3 s αmax | °/s² | 20000 |
| ตัวประกอบความปลอดภัย SF | – | 1,4 |
การคำนวณ
การแปลงความเร่งเชิงมุมเป็น rad/s²:
สูตรที่ 19: ความเร่งเชิงมุม
αS1 = (π / 180) · αS1 [°/s²] = (π / 180) · 9000 = 157 rad/s²
สูตรที่ 20: ความเร่งเชิงมุมสูงสุด
αmax = (π / 180) · αmax [°/s²] = (π / 180) · 20000 = 349 rad/s²
การเลือกมอเตอร์อ้างอิงจากแรงบิดหยุดนิ่งแบบระบายความร้อน Tsw และจากแรงบิดขณะเคลื่อนที่สำหรับการทำงานแบบ S1, Tcw และการทำงานแบบ S6, Tp ตัวประกอบความปลอดภัย SF เท่ากับ 1.4 ช่วยให้มั่นใจว่าสามารถรักษาตำแหน่งได้อย่างเชื่อถือได้ และระบบควบคุมตอบสนองต่อการเบี่ยงเบนได้อย่างปลอดภัย
สูตรที่ 21: แรงบิดหยุดนิ่งแบบระบายความร้อน พร้อมการระบายความร้อนด้วยน้ำ
Tsw = ( TW + TF + TZ ) · 1,4 = 490 N
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Tsw | Nm | แรงบิดหยุดนิ่ง แบบระบายความร้อน |
| TW | Nm | แรงบิดในการประมวลผล |
| TF | Nm | แรงบิดเสียดทานของตลับลูกปืน |
| TZ | Nm | แรงน้ำหนัก (แรงบิดเพิ่มเติม) |
สูตรที่ 22: แรงบิดต่อเนื่องแบบระบายความร้อน พร้อมการระบายความร้อนด้วยน้ำ
Tcw = ( J · αS1 + TW + TF + TZ ) · 1,4 = 1369 N
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Tcw | Nm | แรงบิดต่อเนื่อง แบบระบายความร้อน |
| J | kg·m² | โมเมนต์ความเฉื่อยเชิงมวล |
| αS1 | rad/s² | ความเร่งเชิงมุมในการทำงานแบบ S1 |
| TW | Nm | แรงบิดในการประมวลผล |
| TF | Nm | แรงบิดเสียดทานของตลับลูกปืน |
| TZ | Nm | แรงน้ำหนัก (แรงบิดเพิ่มเติม) |
สูตรที่ 23: แรงบิดพีค
Tp = ( J · αmax + TW + TF + TZ ) · 1,4 = 2444 N
| สัญลักษณ์ | หน่วย | คำอธิบาย |
|---|---|---|
| Tp | Nm | แรงบิดพีค |
| J | kg·m² | โมเมนต์ความเฉื่อยเชิงมวล |
| αmax | rad/s² | ความเร่งเชิงมุมสูงสุด |
| TW | Nm | แรงบิดในการประมวลผล |
| TF | Nm | แรงบิดเสียดทานของตลับลูกปืน |
| TZ | Nm | แรงน้ำหนัก (แรงบิดเพิ่มเติม) |
การคำนวณส่งผลให้ได้ความต้องการต่อไปนี้:
- Tp = 2444 Nm
- Tcw = 1369 Nm
มอเตอร์ RIB13-3P-690×50-Z4.2 (Tp = 3627 Nm, Tcw = 2166 Nm, nlp = 61 min⁻¹) ตอบสนองความต้องการในตัวอย่างการคำนวณได้อย่างครบถ้วน
การควบคุมความเร็วถูกใช้ในตัวอย่างนี้ โต๊ะหมุน NC ควรเริ่มต้นที่ความเร็วที่กำหนดไว้ก่อน จากนั้นโต๊ะหมุน NC จึงประมวลผลชิ้นงานที่ความเร็วนี้
หากต้องการการปรับตำแหน่งเพิ่มเติม เช่นในกรณีของตัวกลับทิศ (reversers) ที่เรียกกันในการควบคุมตำแหน่ง ความเร็วที่ต้องการที่ TP ต้องเพิ่มขึ้นด้วยตัวประกอบความปลอดภัย 10 % ถึง 20 % ความเร็วจำกัด nlp ของมอเตอร์จึงต้องมากกว่าความเร็วที่คำนวณได้พร้อมค่าเพิ่มเติม
หมายเหตุ: ค่า สูตร และตัวอย่างที่ระบุไว้ในบทนี้ ทั้งหมดนำมาจากบทหลักการทางเทคนิคของแคตตาล็อก Schaeffler RE 1 ข้อมูลที่มีผลผูกพันถูกระบุไว้ในแบบเสนอราคาและแบบส่งมอบ อาจมีการเปลี่ยนแปลงโดยไม่แจ้งให้ทราบล่วงหน้า