회전 직접 구동의 장점 (Advantages of Rotary Direct Drives)
동적 성능 향상
- 운동 형태 변환 불필요
- 구동 계통에는 전동 또는 커플링 요소로 인한 탄성, 백래시, 히스테리시스 및 마찰이 존재하지 않습니다.
- 다극 모터
- 다극 설계를 채택한 IDAM 모터는 매우 높은 토크를 발생시킬 수 있으며, 회전수 > 0부터 연속 회전수 전 범위에 걸쳐 이 높은 토크를 활용할 수 있습니다.
- 얇은 링형 로터
- 대형 개방형 내경을 가진 얇은 링형 설계 덕분에 로터 관성이 매우 낮으며, 이로 인해 모터는 매우 높은 가속 능력을 갖습니다.
- 위치 직접 계측
- 위치 직접 계측과 강성 기계 구조 덕분에 위치 결정이 동적이고 고정밀로 수행됩니다.
운영 비용 절감
- 추가 가동 부품 없음
- 구동 조립체의 조립, 조정 및 유지보수 작업이 감소합니다.
- 구동 계통 마모 없음
- 높은 부하와 빈번한 교번 부하 하에서도 구동 계통은 매우 내구성이 높으며, 이로 인해 기계 다운타임이 감소합니다.
- 높은 가용성
- 향상된 서비스 수명 및 감소된 마모 외에도, 토크 모터(torque motor)의 견고성이 시스템 가용성을 높입니다.
설계 유연성 향상
- 중공 샤프트 (hollow shaft)
- 토크 모터의 대형 개방형 내경(중공 샤프트) 설계는 훨씬 큰 설계 유연성을 제공합니다. 중공 샤프트를 통해 배관, 지그, 로터리 유니온 및 배선이 모터 중심을 통과할 수 있습니다.
- 컴포넌트 통합 RDDS
- 소요 공간이 작아 시스템을 기계 설계에 쉽게 통합할 수 있습니다.
- 컴팩트 설계
- 대형 개방형 내경(중공 샤프트)과 함께 시스템은 토크 출력에 비해 매우 컴팩트합니다.
- 적은 부품 수
- 완성도 높은 설계는 시스템을 전체 기계 개념에 통합하는 것을 용이하게 합니다. 더 적고 더 견고한 부품은 낮은 고장률(높은 MTBF*)로 이어집니다.
*MTBF: Mean Time Between Failures(평균 고장 간격 시간)
시스템 장점 (System Advantages)
- 높은 동적 성능과 강성 (High dynamics and stiffness)
- 매우 부드러운 운동 (Extremely smooth motion)
- 높은 가속도 (High acceleration)
- 높은 속도 (High velocity)
- 컴팩트 설계 (Compact design)
- 쉬운 조립 (Easy assembly)
- 우수한 정적 및 동적 부하 강성 (Excellent static and dynamic load rigidity)
- 백래시 없음 (No backlash)
- 저마모, 저유지보수 시스템 (Low-wear and low-maintenance system)
- 낮은 관성 (Small inertia)
- 피크 토크 Tp: 8.9 – 369 Nm
- 계측 시스템 (Measuring system): 광학 계측 원리, 모델에 따라 다수의 증분 수
- 베어링 (Bearing): 컴팩트, 높은 외부 경사 토크(tilting torque) 지지, 높은 강성과 정밀도, 매우 낮은 축방향 및 레이디얼 런아웃(runout)
- 자유 내경 (Free inner diameter)
표준 구조 (Standard Design)
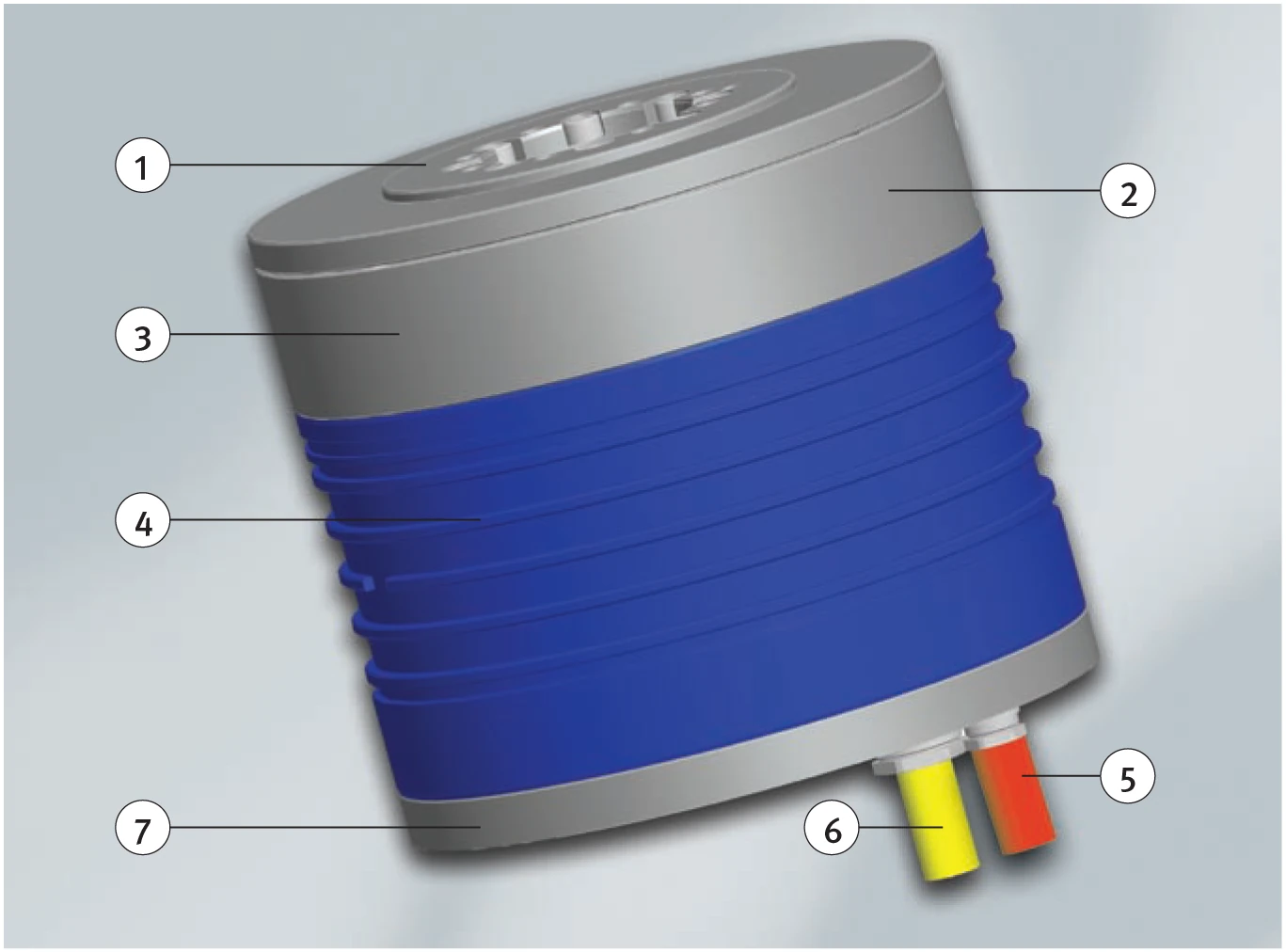
RDDS 표준 구조: 부품 1(스테이지 플레이트)에서 7(베이스 플레이트)까지의 위치 다이어그램
RDDS 표준 구조는 다음 7가지 주요 부품으로 구성됩니다:
열 모터 보호 (Thermal Motor Protection)
모니터링 회로 I 및 II (Monitoring Circuit I and II)
직접 구동 시스템은 열 성능 한계에서 운전되는 경우가 많습니다. 또한 운전 중 허용 정격 전류를 초과하는 예기치 않은 과부하가 발생할 수 있습니다. 이러한 이유로 모터용 서보 컨트롤러에는 일반적으로 모터 전류를 제어하기 위한 과부하 보호 기능이 있어야 합니다. 모터 전류의 유효값(실효값)은 모터의 허용 정격 전류를 단시간 동안만 초과할 수 있습니다. 이러한 간접 온도 모니터링 방식은 빠르고 신뢰성이 높습니다.
IDAM 모터에는 열 보호에 사용되는 온도 센서(PTC 및 KTY)가 장착되어 있습니다.
모니터링 회로 I (Monitoring Circuit I)
3상 권선(winding)에는 모터 보호를 위해 직렬 연결된 3개의 PTC가 장착되어 있습니다. PTC는 정온도 계수 서미스터(Positive Temperature Coefficient thermistor)입니다. 설치 후 열 시정수는 5 s 미만입니다.
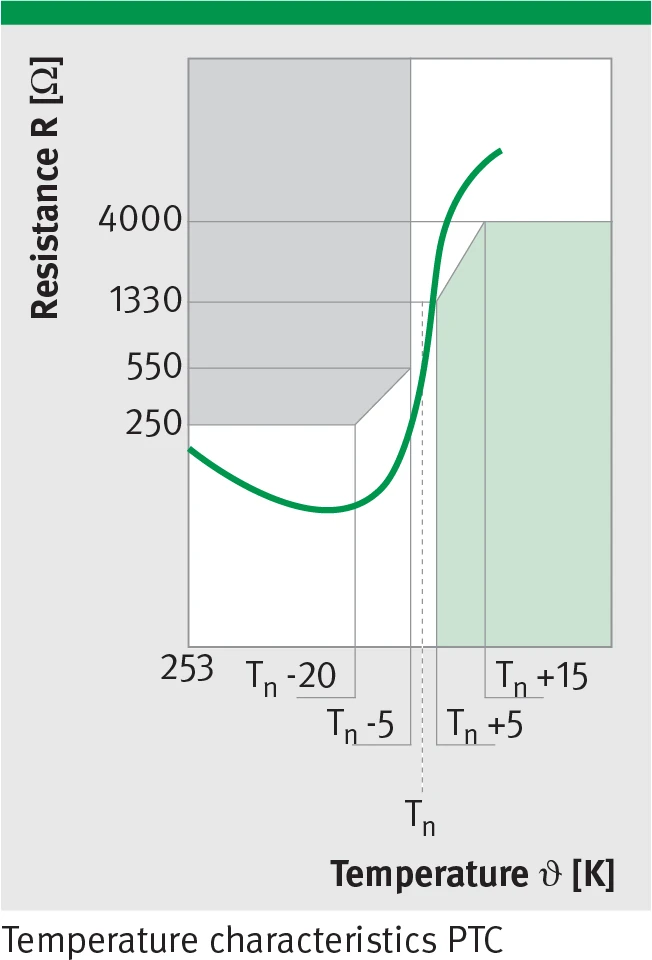
PTC 온도 특성: 저항 R [Ω] 대 온도 ϑ [K] 곡선, 정격 응답 온도 Tn 초과 시 저항 급격 상승
PTC 온도 특성 (Temperature characteristics PTC)
저항값 R [Ω] 대 온도 ϑ [K] 대응 (출처 문서에서 발췌):
| 온도 | Tn-20 | Tn-5 | Tn | Tn+5 | Tn+15 |
|---|---|---|---|---|---|
| 저항 R [Ω] | 250 | 550 | 1330 | 4000 | — |
Tn: 정격 응답 온도 (Nominal response temperature)
KTY와 달리 PTC의 저항은 정격 응답 온도 Tn을 초과하면 급격히 상승하여 냉간 값의 수 배에 달합니다. 3개의 PTC 소자를 직렬 연결하면, 소자 중 하나만 Tn을 초과해도 전체 저항에 명확한 변화가 발생합니다. 3개의 센서를 사용함으로써 모터가 비대칭 상 부하 정지 상태에서도 안전 정지 신호가 발생하도록 보장합니다.
다운스트림에 연결된 상용 모터 보호 트립 장치는 일반적으로 1.5~3.5 kΩ 사이에서 동작합니다. 이를 통해 각 권선마다 몇 도 오차 범위 내에서 과온을 감지할 수 있습니다. 트립 장치는 PTC 회로의 저항이 너무 낮은 경우에도 동작하며, 이는 통상 모니터링 회로의 결함을 나타내고 컨트롤러와 모터 센서 간의 안전한 전기 절연을 보장합니다. 모터 보호 트립 장치는 공급 범위에 포함되지 않습니다.
주의: PTC는 온도 측정에 적합하지 않습니다. 온도 측정이 필요한 경우 KTY를 사용하십시오. 추가 모니터링 센서는 고객 요청에 따라 통합할 수 있습니다. 원칙적으로 PTC 센서 신호는 과온 방지를 위해 반드시 모니터링되어야 합니다.
모니터링 회로 II (Monitoring Circuit II)
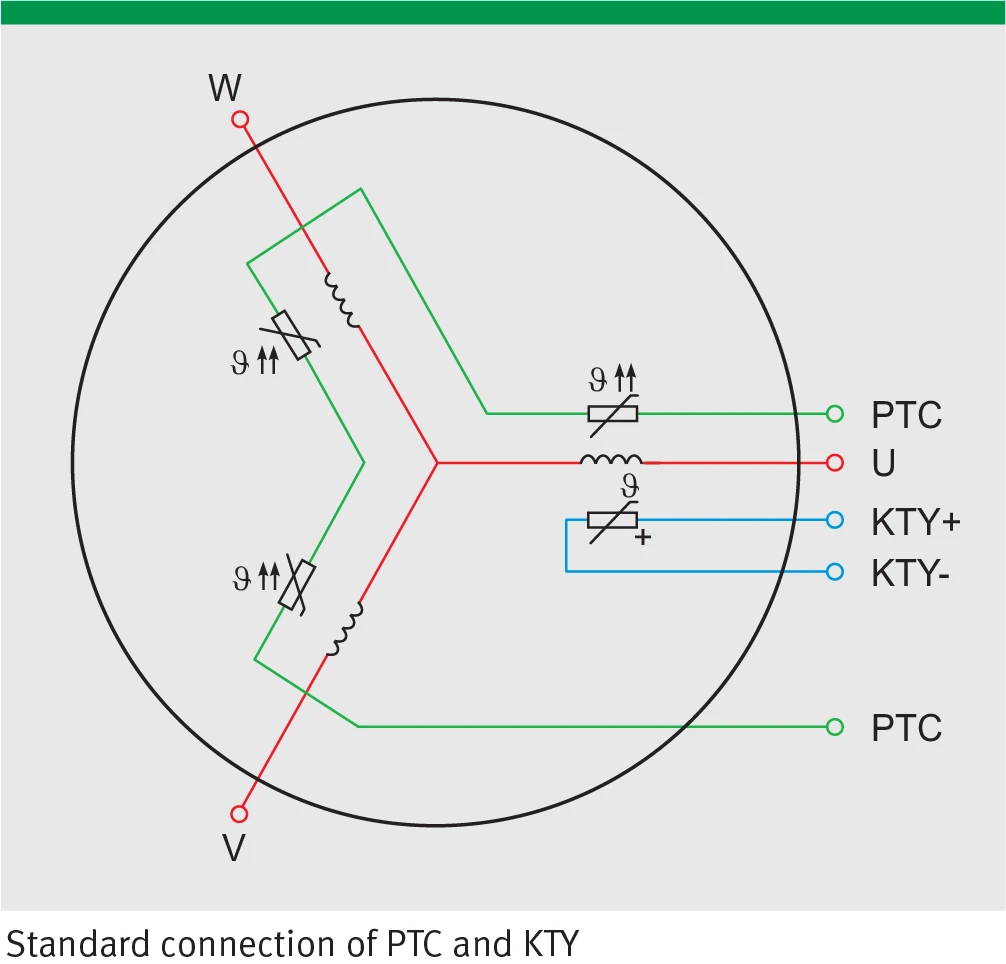
PTC 및 KTY 표준 결선: 3상 권선 (U, V, W) 각각에 PTC 장착; 1상 (U)에 KTY84-130 장착
모터의 한 상에는 추가 KTY84-130 센서가 장착되어 있습니다. 이 센서는 정온도 계수를 가진 반도체 저항(semiconductor resistor with positive temperature coefficient)입니다.
온도 등가 신호는 모터 유형에 따라 달라지는 지연을 두고 생성됩니다. 모터 과온 방지를 위해 컨트롤러에 차단 한계값이 정의됩니다. 모터 정지 시 권선에는 각 극 위치에 따라 결정되는 크기의 일정 전류가 흐릅니다.
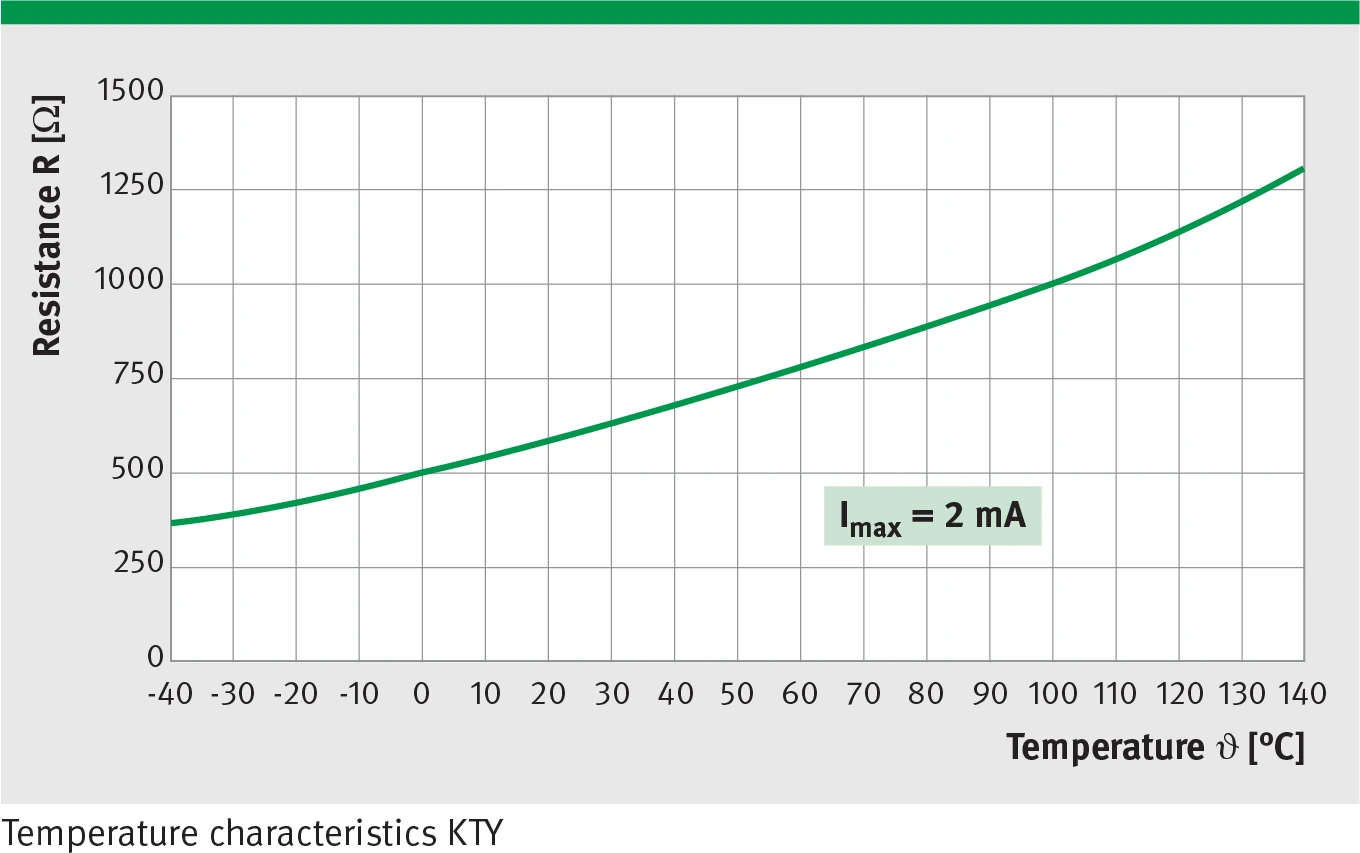
KTY 온도 특성: 저항 R [Ω] 대 온도 ϑ [°C] 곡선 (−40~140 °C), 측정 전류 Imax = 2 mA
따라서 모터가 균일하게 가열되지 않으며, 이로 인해 모니터링되지 않는 권선이 과열될 수 있습니다. PTC 및 KTY 센서는 모터에 대한 기본 절연을 갖추고 있습니다. 이 센서들은 DIN EN 50178 표준에 따른 PELV/SELV 회로에 직접 연결하기에 적합하지 않습니다.
주의: KTY 센서는 단일 권선만 모니터링합니다. 그 신호는 온도 모니터링 또는 경보에 사용할 수 있습니다. 단독으로 차단 목적으로만 사용하는 것은 허용되지 않습니다.
전기 연결 (Electrical Connections)
RDDS1 매트릭스의 표준 케이블 연결은 축방향 인출이며, 위치는 도면에 정의되어 있습니다. 모터 출구에서 케이블 길이는 1.0 m이며, 선단은 개방되어 엔드 슬리브가 장착되어 있습니다. 사용된 케이블은 UL 인증을 받았으며 케이블 드래그 체인(cable drag chains)에 적합합니다.
회전 시스템은 선택적으로 하우징에 직접 장착된 플러그 또는 연결 케이블 끝단의 커플러 플러그가 제공됩니다.
시스템 회전 정방향
스테이지 플레이트(stage plate)의 표준 회전 방향은 반시계 방향이지만, 연결 유형에 따라 다를 수 있습니다.
핀 배치 — 케이블 연결 (표준)
케이블 유형: 4G1.5 + 2x (2x0.75) KAWEFLEX 5281, 외경 Ø 12.6 mm, 동적 굴곡 반경 95 mm, 정적 굴곡 반경 63 mm
| 모터 (Motor) | |
|---|---|
| 코어 (Core) | 신호 (Signal) |
| 1 | Phase U |
| 2 | Phase V |
| 3 | Phase W |
| GNYE | PE |
| 5 | PTC (3x 직렬, 전상) |
| 6 | PTC (3x 직렬, 전상) |
| 7 | + 온도 센서 KTY84-130 (단상) |
| 8 | - 온도 센서 KTY84-130 (단상) |
| Shield | |
케이블 유형: 12x0.08 NJ AWM STYLE 20963, 외경 Ø 3.7 mm, 동적 굴곡 반경 40 mm, 정적 굴곡 반경 8 mm
| 계측 시스템 1 Vpp (Measuring system 1 Vpp) | |
|---|---|
| 코어 (Core) | 신호 (Signal) |
| GN | U1+ |
| BN | U1- |
| BK | U2+ |
| RD | U2- |
| GY | U0+ |
| PK | U0- |
| WH | GND |
| BU | +5 V |
| Shield | |
핀 배치 — 플러그 연결 (옵션)
RDDS1-130xH: 9극 M17 마운팅 플러그
| 모터 (Motor) — 9극 M17 마운팅 플러그 | |
|---|---|
| 핀 (Pin) | 신호 (Signal) |
| 1 | Phase U |
| 2 | Phase V |
| 3 | Phase W |
| PE | PE |
| A | PTC (3x 직렬, 전상) |
| B | PTC (3x 직렬, 전상) |
| C | NC |
| D | + 온도 센서 KTY84-130 (단상) |
| E | - 온도 센서 KTY84-130 (단상) |
| Case | Shield |
| 계측 시스템 1 Vpp — 17극 M17 마운팅 플러그 | |
|---|---|
| 핀 (Pin) | 신호 (Signal) |
| 1 | +5 V Sense |
| 2 | NC |
| 3 | NC |
| 4 | GND Sense |
| 5 | NC |
| 6 | NC |
| 7 | +5 V |
| 8 | NC |
| 9 | NC |
| 10 | GND |
| 11 | NC |
| 12 | U2+ |
| 13 | U2- |
| 14 | U0+ |
| 15 | U1+ |
| 16 | U1- |
| 17 | U0- |
| Case | Shield |
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH 및 연결 변형 MA/MU/MD (전 사이즈)
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH는 8극 M23 마운팅 플러그를 사용하며, 연결 변형 MA/MU/MD (전 사이즈)는 케이블에 8극 M23 커플러 플러그를 사용합니다.
| 모터 (Motor) — 8극 M23 마운팅 플러그 | |
|---|---|
| 핀 (Pin) | 신호 (Signal) |
| 1 | Phase U |
| 4 | Phase V |
| 3 | Phase W |
| 2 / PE | PE |
| A | PTC (3x 직렬, 전상) |
| B | PTC (3x 직렬, 전상) |
| C | + 온도 센서 KTY84-130 (단상) |
| D | - 온도 센서 KTY84-130 (단상) |
| Case | Shield |
| 계측 시스템 1 Vpp — 12극 M23 마운팅 플러그 / 커플러 플러그 | |
|---|---|
| 핀 (Pin) | 신호 (Signal) |
| 1 | U2- |
| 2 | +5 V Sense |
| 3 | U0+ |
| 4 | U0- |
| 5 | U1+ |
| 6 | U1- |
| 7 | NC |
| 8 | U2+ |
| 9 | NC |
| 10 | GND |
| 11 | GND Sense |
| 12 | +5 V |
| Case | Shield |
정류 (Commutation)
회전 직접 구동 시스템은 정류(commutation) 모드로 운전하는 것이 바람직합니다. IDAM 토크 모터는 표준으로 홀 센서가 장착되어 있지 않습니다. IDAM은 계측 시스템 관련 정류 방식을 권장하며, 이는 현대의 서보 인버터 및 컨트롤러에서 지원됩니다.
절연 강도 (Insulation Strength)
링크 전압 최대 600 VDC에 대한 절연 강도.
IDAM 모터는 EC 지침 73/23/EEC 및 유럽 표준 EN 50178과 EN 60204를 준수합니다. 출하 전 차별화된 고전압 시험 방법으로 시험되며 진공 환경에서 주조됩니다. 모터 유형과 관련된 작동 전압을 반드시 준수하십시오.
인버터 운전 시 모터 단자의 과전압
빠른 스위칭 전력 반도체가 높은 du/dt 부하를 발생시키기 때문에, 모터와 인버터 사이에 긴 연결 케이블(약 5 m 이상)을 사용할 경우 모터 단자에 실제 인버터 전압보다 현저히 높은 전압 스파이크가 발생할 수 있으며, 모터 절연에 매우 높은 부하를 줍니다.
주의:
- PWM 모듈의 du/dt 값은 8 kV/µs를 초과해서는 안 됩니다.
- 모터 연결 케이블은 가능한 한 짧게 유지해야 합니다.
- 모터 보호를 위해 특정 구성에서 오실로스코프를 사용하여 모터 권선 대 PE에 인가되는 전압(PWM)을 항상 측정해야 합니다. 현재 전압 스파이크는 1 kV를 크게 초과해서는 안 됩니다. 약 2 kV부터 절연이 점차 손상될 것으로 예상해야 합니다.
- 컨트롤러 제조업체가 제공하는 권장 사항 및 구성 주의 사항을 준수하십시오.
IDAM 엔지니어가 귀하의 애플리케이션을 지원하며 과도한 전압을 판단하고 저감하는 데 도움을 드립니다.
냉각 및 냉각 회로 (Cooling and Cooling Circuit)
전력 손실 및 열 손실
모터 상수 km에 의해 결정되는 전력 손실 외에도, 모터는 주파수 의존적 손실을 받으며 특히 더 높은 제어 주파수(50 Hz 이상)에서 더욱 현저합니다. 이러한 손실이 함께 모터 및 기타 시스템 조립체의 온도 상승을 유발합니다.
모터의 낮은 제어 주파수(< 80 Hz)에서는 다음 규칙이 적용됩니다: 모터 상수 km이 높은 모터는 동등한 사양의 모터 상수가 낮은 모터에 비해 더 낮은 전력 손실을 발생시킵니다.
모터 운전 중 발생한 전력 손실은 모터 조립체를 통해 연결된 부품으로 전달됩니다. 전체 시스템은 대류, 전도 및 복사 세 가지 방식을 통해 열 분포를 제어하도록 세심하게 설계되어 있습니다.
액냉 모터의 연속 토크는 비냉각 모터의 약 2배입니다. 회전 직접 구동 시스템의 선정 및 통합은 설치 공간, 정밀도 및 냉각 요구 사항에 따라 이루어져야 합니다.
고성능 기계 및 높은 동적 운전으로 인해 상응하는 높은 베어링 부하가 걸리는 설비에는 능동 냉각을 우선적으로 사용하는 것이 좋습니다.
냉각 설계
시스템의 냉각은 재킷 냉각(jacket cooling)으로 설계되어 있으며, 고객이 냉각 장치의 냉각 회로에 연결해야 합니다. 냉각 재킷은 선택 사항으로 모터와 함께 제공되거나, 고객의 기계 구조에 이미 통합된 부품으로 공급됩니다.
냉각 매체(cooling medium)는 입구에서 다양한 높이의 냉각 핀 구멍을 통해 출구로 흐릅니다. 입구 및 출구 연결부는 필요에 따라 두 개의 연결 포트에 할당할 수 있습니다. 유로는 O링으로 외부와 밀봉됩니다.
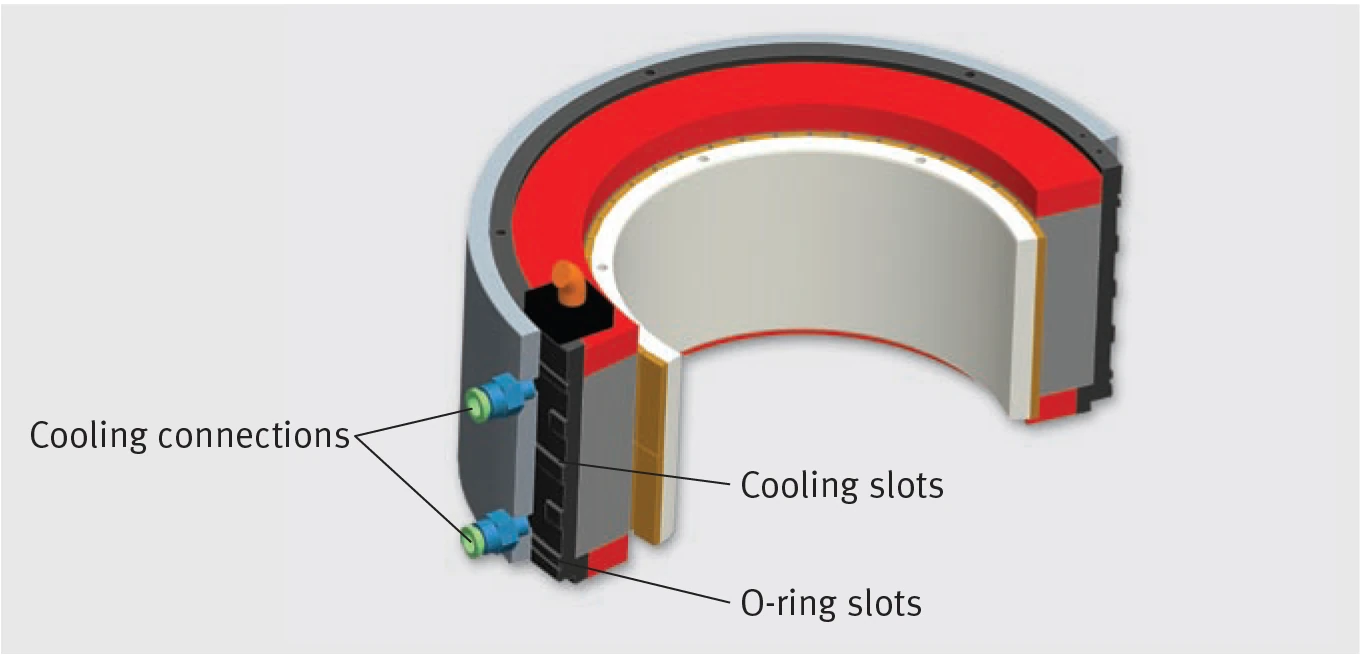
냉각 재킷 단면: 냉각 연결부(Cooling connections), 냉각 슬롯(Cooling slots) 및 O링 슬롯(O-ring slots) 위치 표시
주의: 냉각제로 물을 사용할 경우, 냉각 회로의 부식 및 생물학적 침전물을 방지하는 첨가제를 반드시 사용해야 합니다.
냉각 매체 공급 온도에 따른 특성 데이터 의존성 (Dependency of Characteristic Data on the Supply Temperature of Cooling Medium)
데이터 시트에 기재된 수냉 운전 시 연속 전류 Icw는 정격 공급 온도 ϑnV = 25 °C에서 달성 가능한 값입니다. 더 높은 공급 온도 ϑV는 냉각 성능 저하를 초래하며, 이에 따라 정격 전류도 감소합니다. 저감된 연속 전류 Ic red는 다음 이차 방정식으로 계산할 수 있습니다:
Ic red = Icw × √ϑmax − ϑVϑmax − ϑnV
| 기호 | 설명 | 단위 |
|---|---|---|
| Ic red | 저감된 연속 전류 (Reduced continuous current) | A |
| Icw | ϑnV에서 수냉 연속 전류 (Continuous current, cooled at ϑnV) | A |
| ϑV | 현재 공급 온도 (Current supply temperature) | °C |
| ϑnV | 정격 공급 온도 (Rated supply temperature) | °C |
| ϑmax | 최대 허용 권선 온도 (Maximum permissible winding temperature, 일정 모터 전류에 적용) | °C |
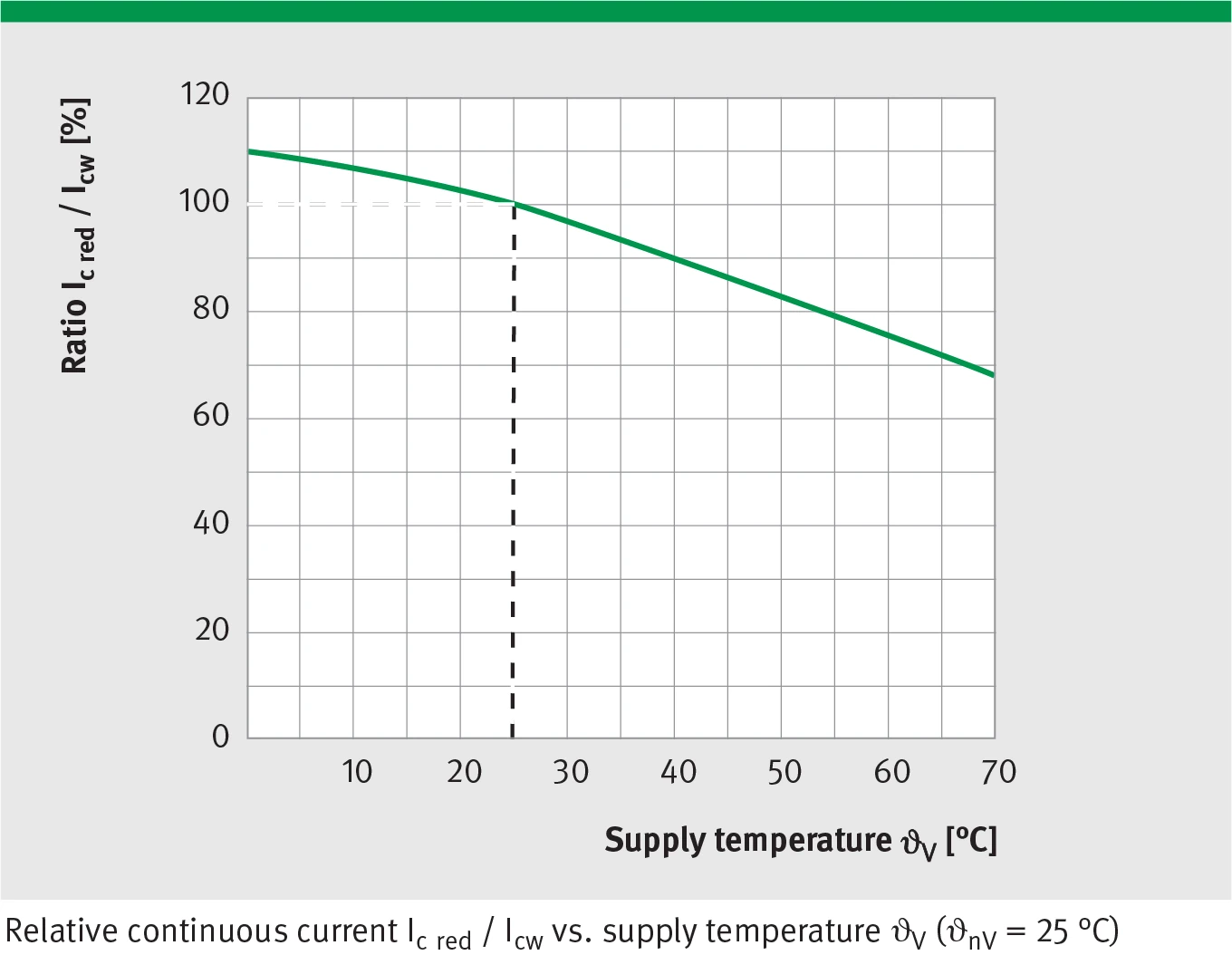
상대 연속 전류 Ic red / Icw [%] 대 공급 온도 ϑV [°C] 곡선 (정격 공급 온도 ϑnV = 25 °C)
위치 결정 사이클 (Positioning Cycle)
다음 위치 결정 사이클 예시는 시스템 RDDS1-160x195-S-B-CA-WM-9000을 사용합니다:
예시 시스템 파라미터
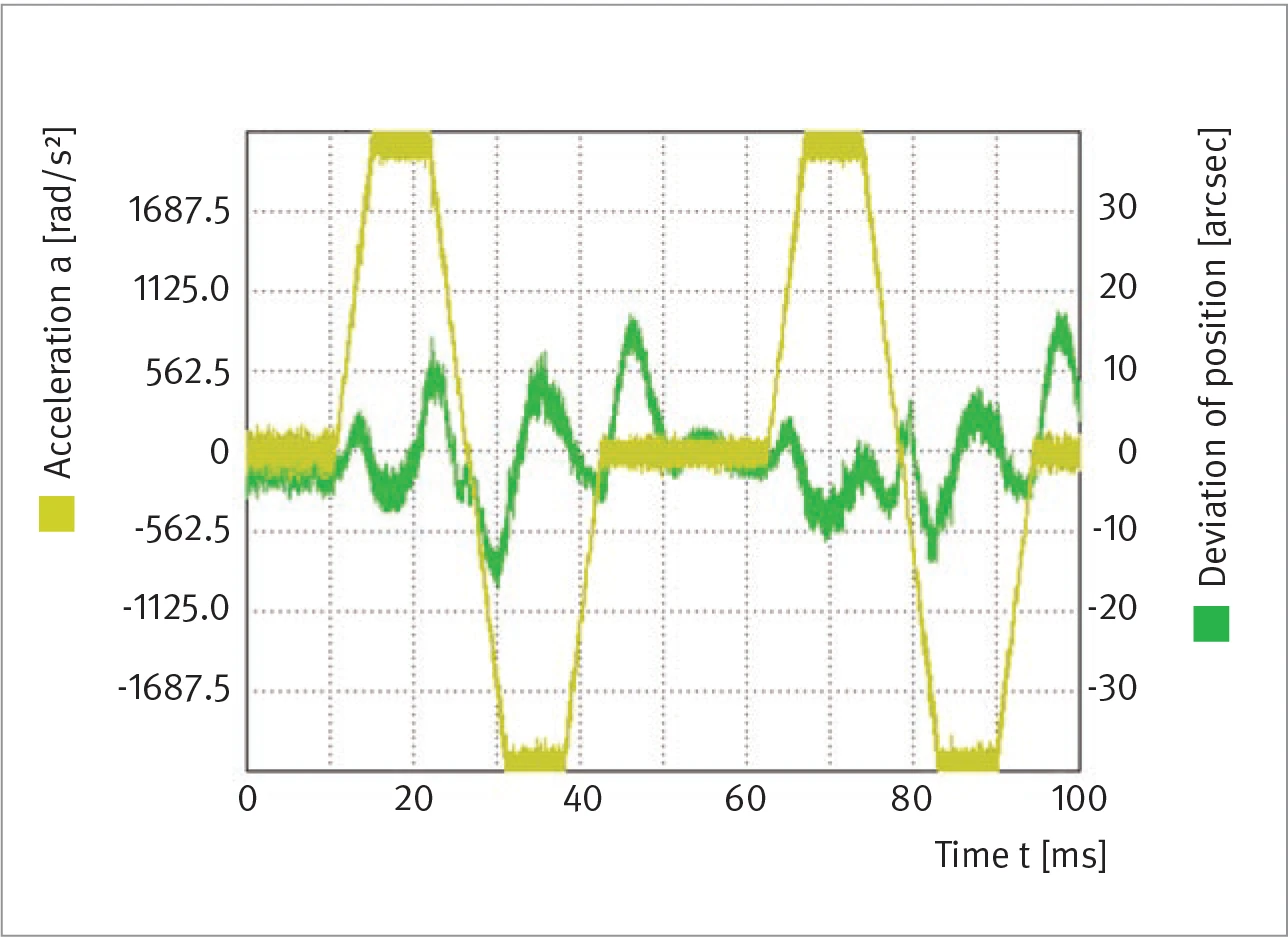
위치 결정 사이클 (좌): 각가속도 a [rad/s²] 및 위치 편차 [arcsec] 대 시간 t [ms]
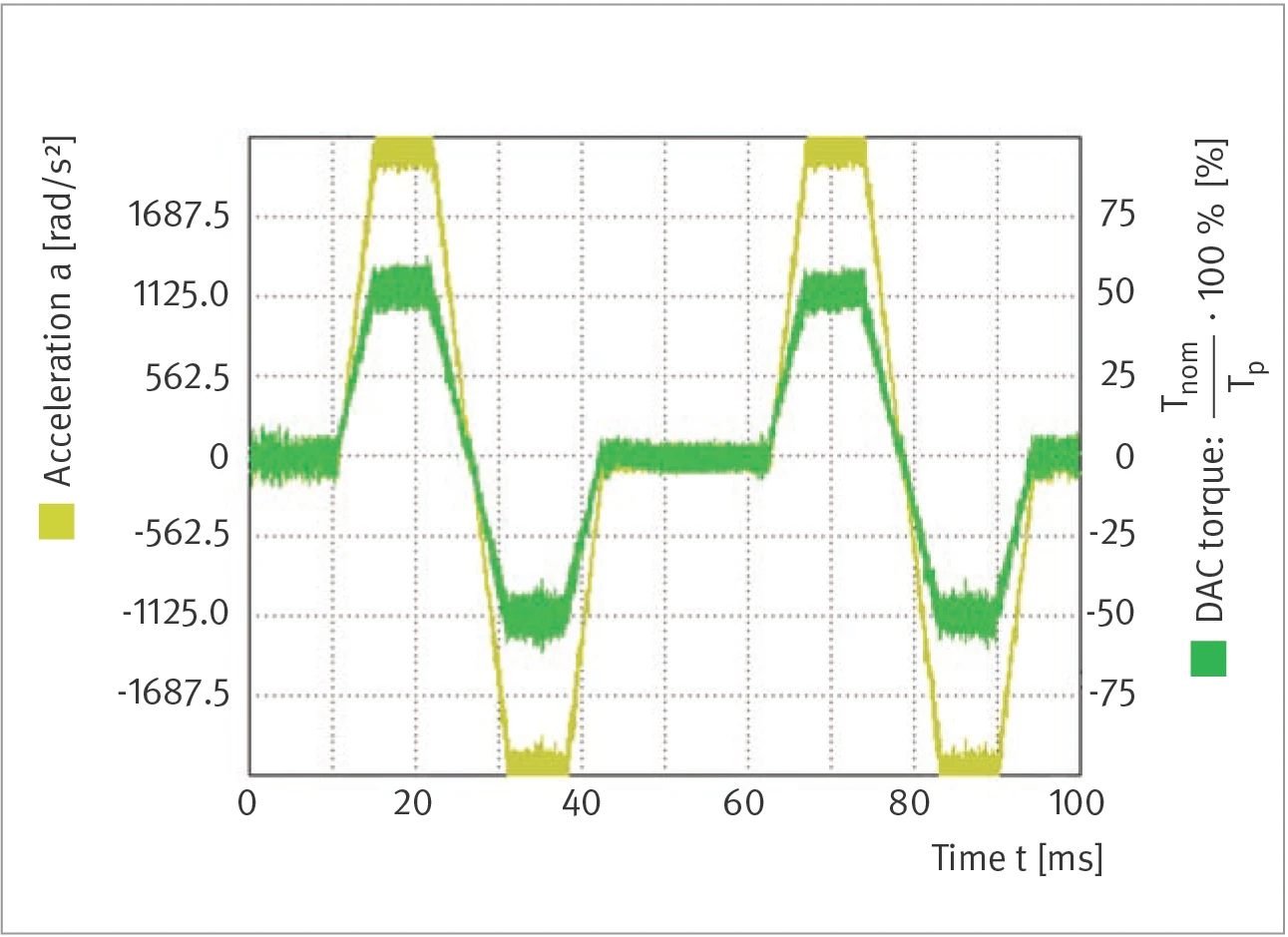
위치 결정 사이클 (우): 각가속도 a [rad/s²] 및 DAC 토크 [% Tnom/Tp] 대 시간 t [ms]
Tp: 피크 토크 (Peak torque); Tnom: 정격 토크 (Nominal torque)
시스템 구성 (System Configuration)
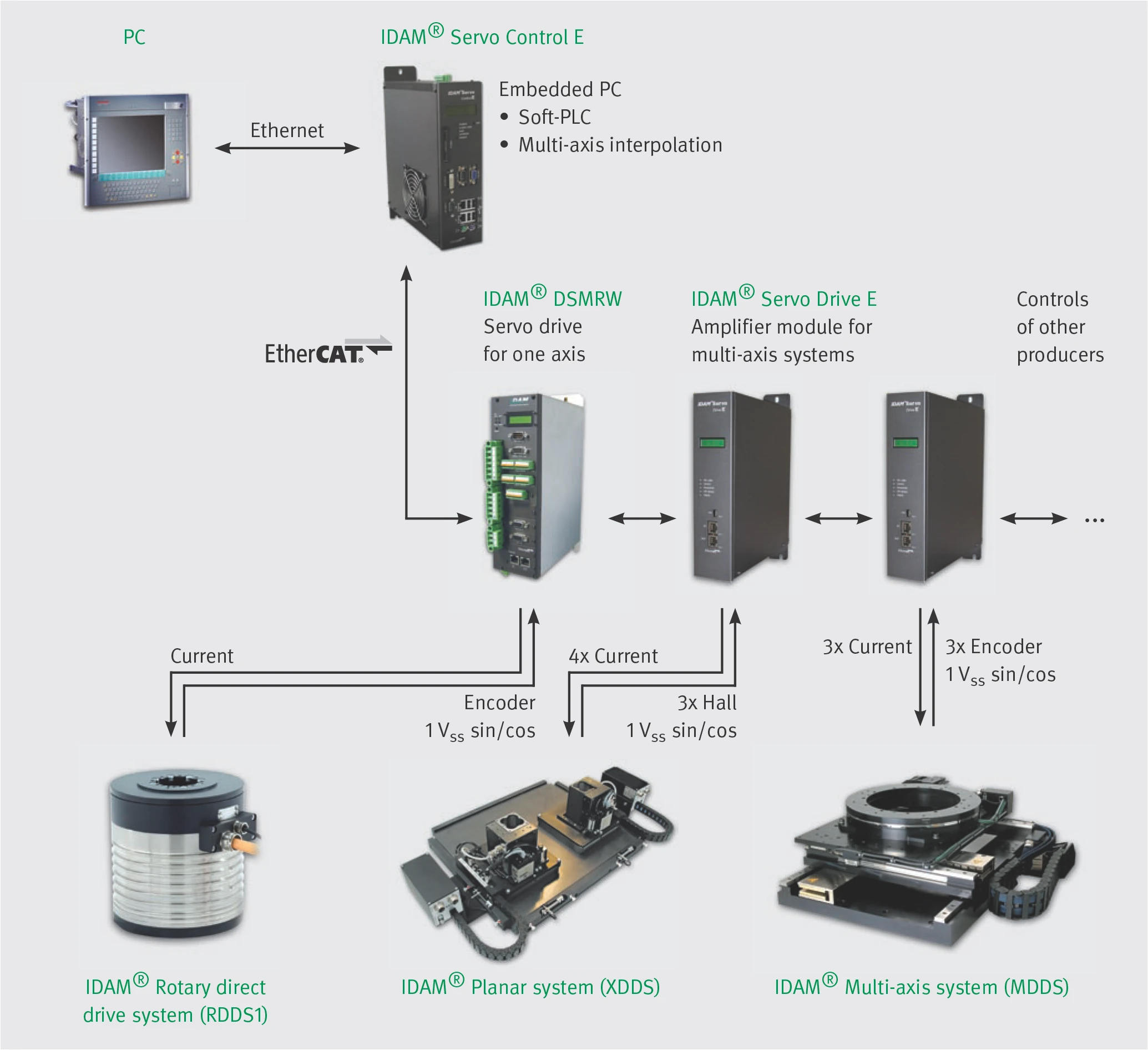
시스템 구성: RDDS1, IDAM DSMRW, Servo Control E, Servo Drive E 및 PC (Ethernet/EtherCAT) 상호 연결, XDDS 평면 시스템 및 MDDS 다축 시스템 지원
회전 직접 구동 시스템(RDDS1)은 다음 제어 아키텍처로 운전할 수 있습니다:
- IDAM® DSMRW: 단축 서보 드라이브 또는 타사 컨트롤러
- 전류 피드백 (Current feedback)
- 엔코더 1 Vss sin/cos
- IDAM® Servo Control E + IDAM® Servo Drive E (다축 시스템용 증폭기 모듈)
- Ethernet으로 PC 연결 (Embedded PC, Soft-PLC 및 다축 보간 포함)
- IDAM® RDDS1 (회전), IDAM® XDDS (평면), IDAM® MDDS (다축) 시스템 지원
- 타사 컨트롤러 (Controls of other producers)
추가 부하 (Additional Loads)
다음은 회전 시스템의 가능한 부하 상황을 설명합니다. 외력 또는 추가 질량은 작용점 및 위치에 따라 회전 시스템에 특정 부하를 유발합니다.
축방향 힘과 축방향 부하
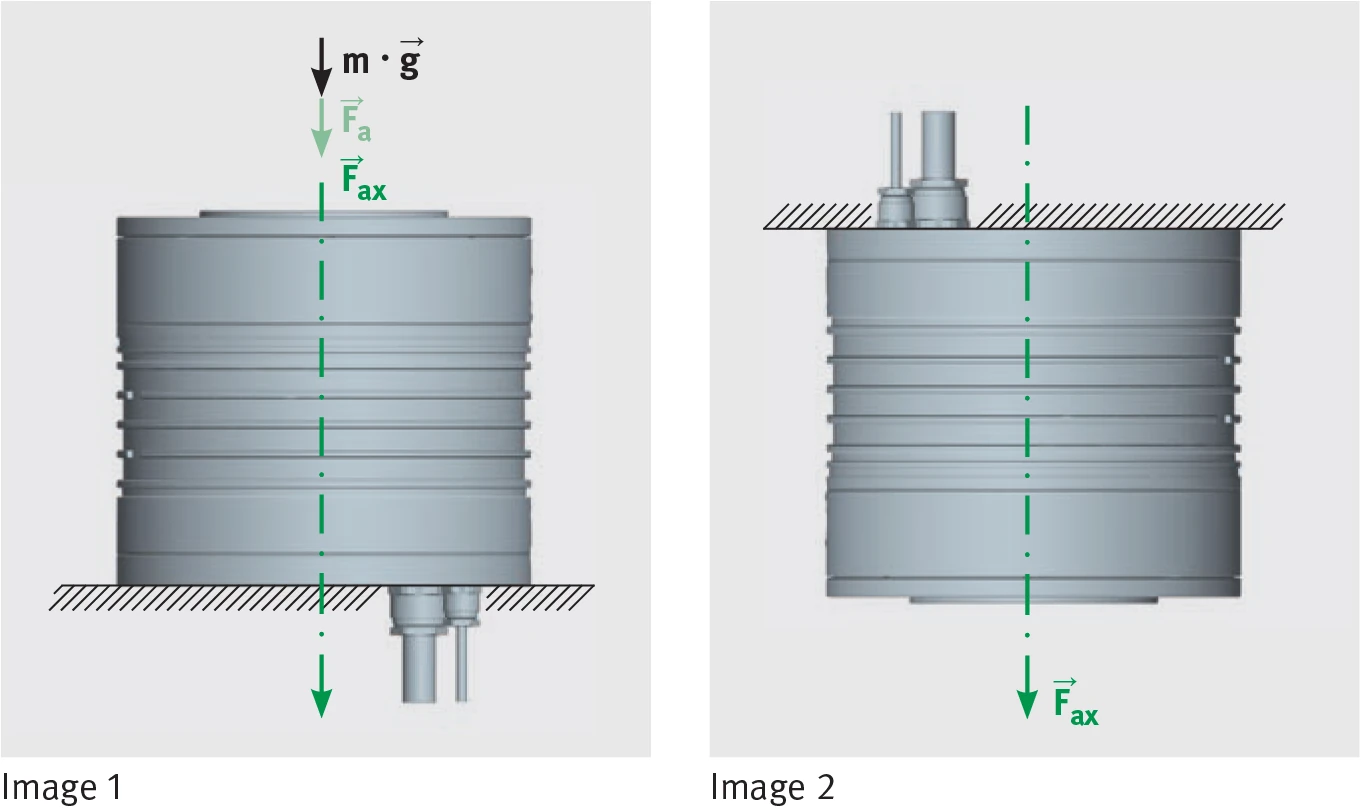
그림 1과 그림 2: 동심 배치의 합성 축방향 힘 Fax = Fa + m × g (두 가지 조립 방향)
작용선이 회전축과 일치하여 중심에 작용하는 외력(Fa)과 동심 배치된 추가 질량(m)은, 그림 1 및 그림 2의 조립 방식에서 합성 축방향 힘(Fax)을 발생시킵니다:
Fax = Fa + m × g
경사 토크 (축방향 편심)
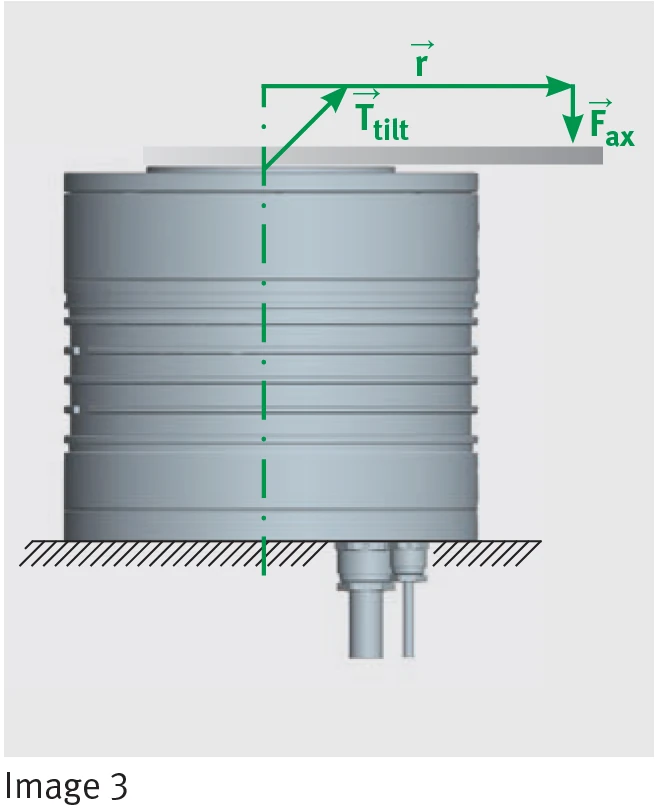
그림 3: 편심거리 r이 경사 토크 Ttilt를 발생시킴 (정방향 설치)
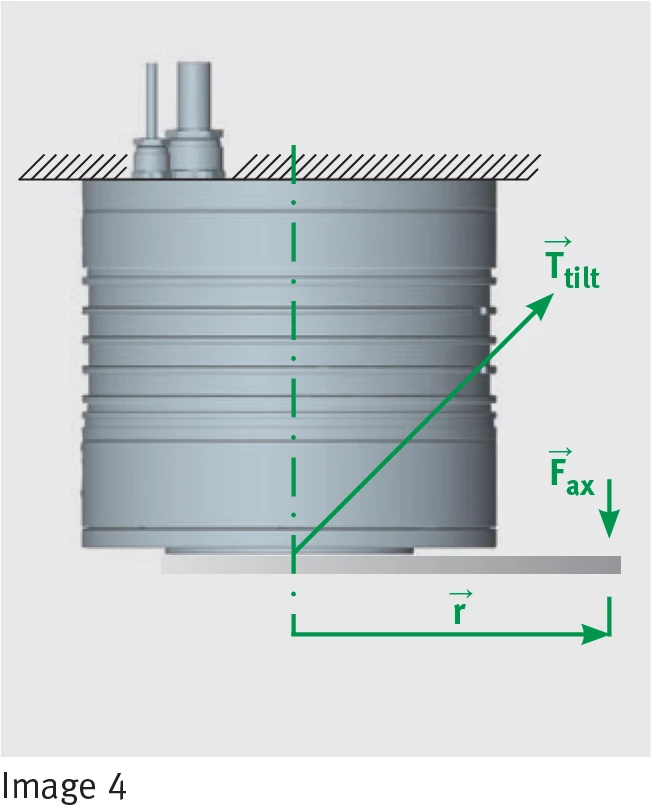
그림 4: 편심거리 r이 경사 토크 Ttilt를 발생시킴 (역방향 설치)
합성 축방향 힘(Fax)이 편심거리 r로 회전축에 대해 편심되어 있는 경우(그림 3 및 그림 4), 회전 시스템에는 추가 경사 토크가 작용합니다:
Ttilt = r × Fax
레버 암과 힘이 서로 수직인 경우:
|Ttilt| = |r| × |Fax| × sin 90°
Ttilt = r × Fax
레이디얼 힘과 경사 토크
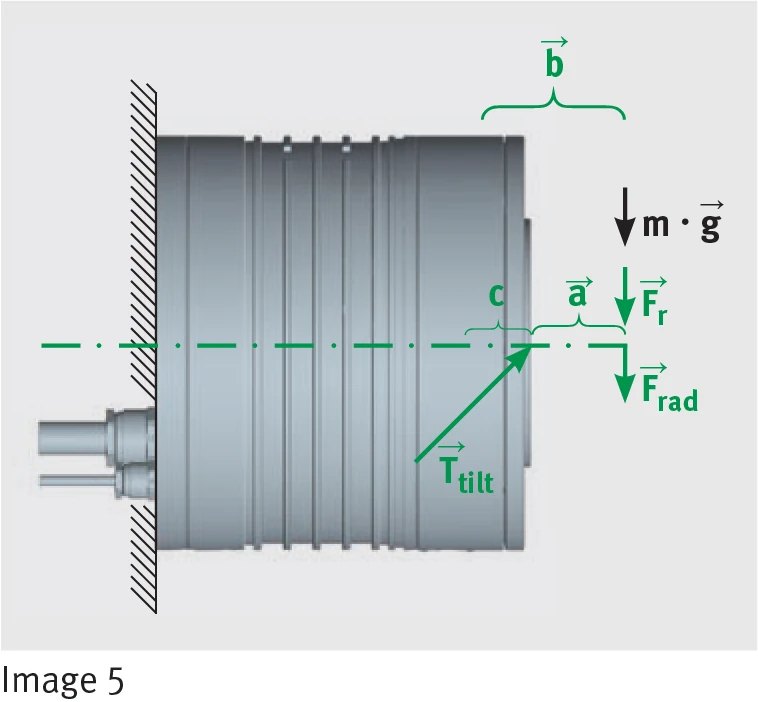
그림 5: 레이디얼 힘 Fr, 합성 레이디얼 힘 Frad, 거리 a, b, c 및 경사 토크 Ttilt 표시 (수평 설치)
작용선이 회전축에 수직으로 중심에 레이디얼로 작용하는 외력(Fr)과 동심 배치된 추가 질량(m)은, 그림 5의 조립 방식에서 합성 레이디얼 응력(Frad)을 발생시킵니다:
Frad = Fr + m × g
레이디얼 힘(Frad)의 작용점은 일반적으로 스테이지 플레이트로부터 거리 (a)에 있으며, 레이디얼 부하는 추가로 경사 토크를 유발합니다. 그림 5에 따른 경사 토크는:
Ttilt = b × Frad
레버 암과 힘이 서로 수직인 경우, 앞의 내용과 유사하게:
|Ttilt| = |b| × |Frad| × sin 90°
Ttilt = b × Frad
여기서 거리 b는 그림 5에 따라:
b = a + c
따라서 경사 토크는:
Ttilt = (a + c) × Frad
c는 각 직경 규격에 따른 특정 값입니다:
| RDDS1 | c [m] |
|---|---|
| 130xH | 0.028 |
| 160xH | 0.032 |
| 180xH | 0.026 |
| 230xH | 0.029 |
주의: 어떠한 경우에도 규정된 한계값(Fax, Frad, Ttilt)을 초과해서는 안 됩니다. 더 높은 부하 요구 사항이 있는 경우 당사에 문의하십시오.
회전 애플리케이션용 직접 구동 선정 (Selection of Direct Drives for Rotary Applications)
사이클 애플리케이션 (Cycled Applications)
사이클 운전에서는 순차 위치 결정 동작 사이에 운동이 없는 정지 구간이 삽입됩니다. 단순한 위치 결정 시퀀스는 양의 가속 운동에 이은 감속(일반적으로 동일한 크기의 음의 가속)으로 구성되며, 이 경우 가속 시간과 감속 시간이 같습니다. 최대 각속도 ωmax는 가속 구간 종료 시 도달합니다.
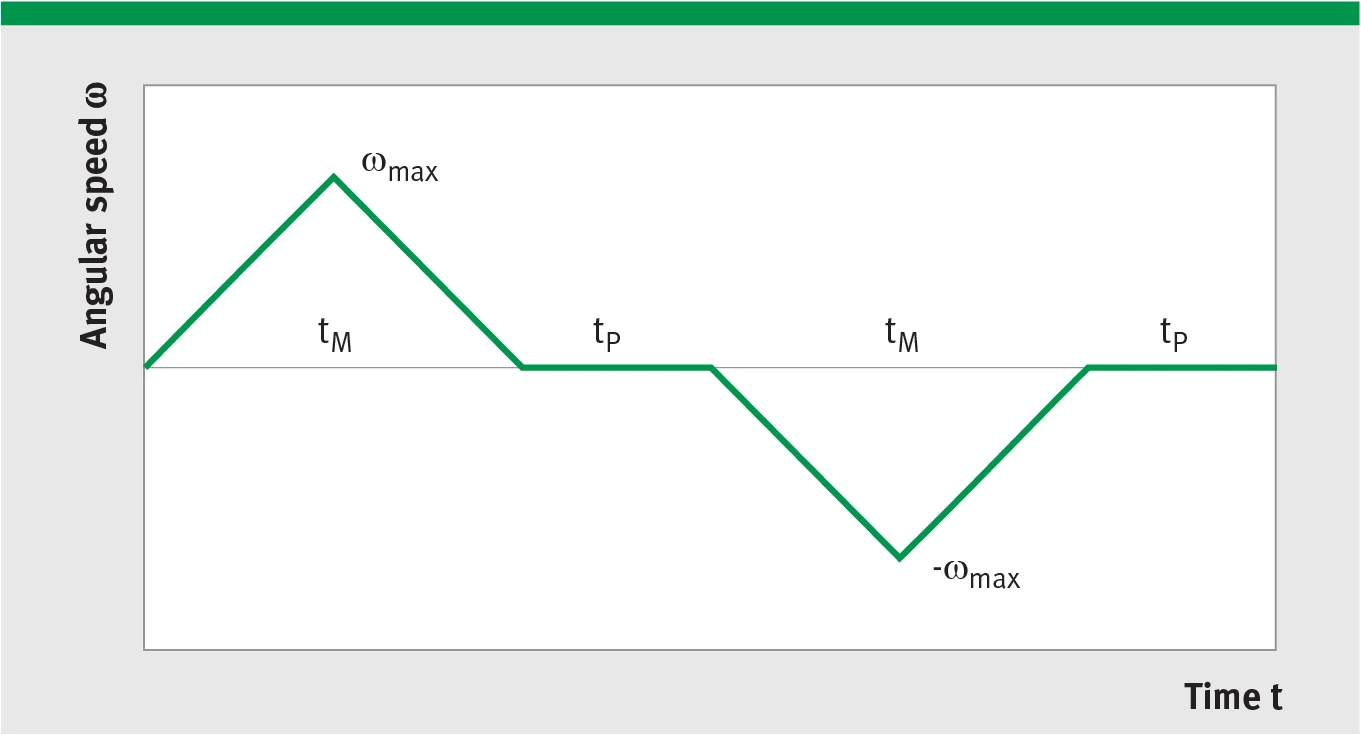
각속도 ω 대 시간 t: ωmax, −ωmax, 운동 시간 tM 및 정지 시간 tP가 표시된 사이클 왕복 운동
이로부터 α(t) 다이어그램(α: 각가속도)과 운동에 필요한 토크 흐름이 도출됩니다:
T = J × α
(T: 토크 [Nm], J: 질량 관성 모멘트 [kgm2], α: 각가속도 [rad/s2])
사이클은 ω(t) 다이어그램(ω: 각속도, t: 시간)으로 설명됩니다. 다이어그램은 정지 구간이 포함된 왕복 운동(tM: 운동 시간, tP: 정지 시간)을 나타냅니다.
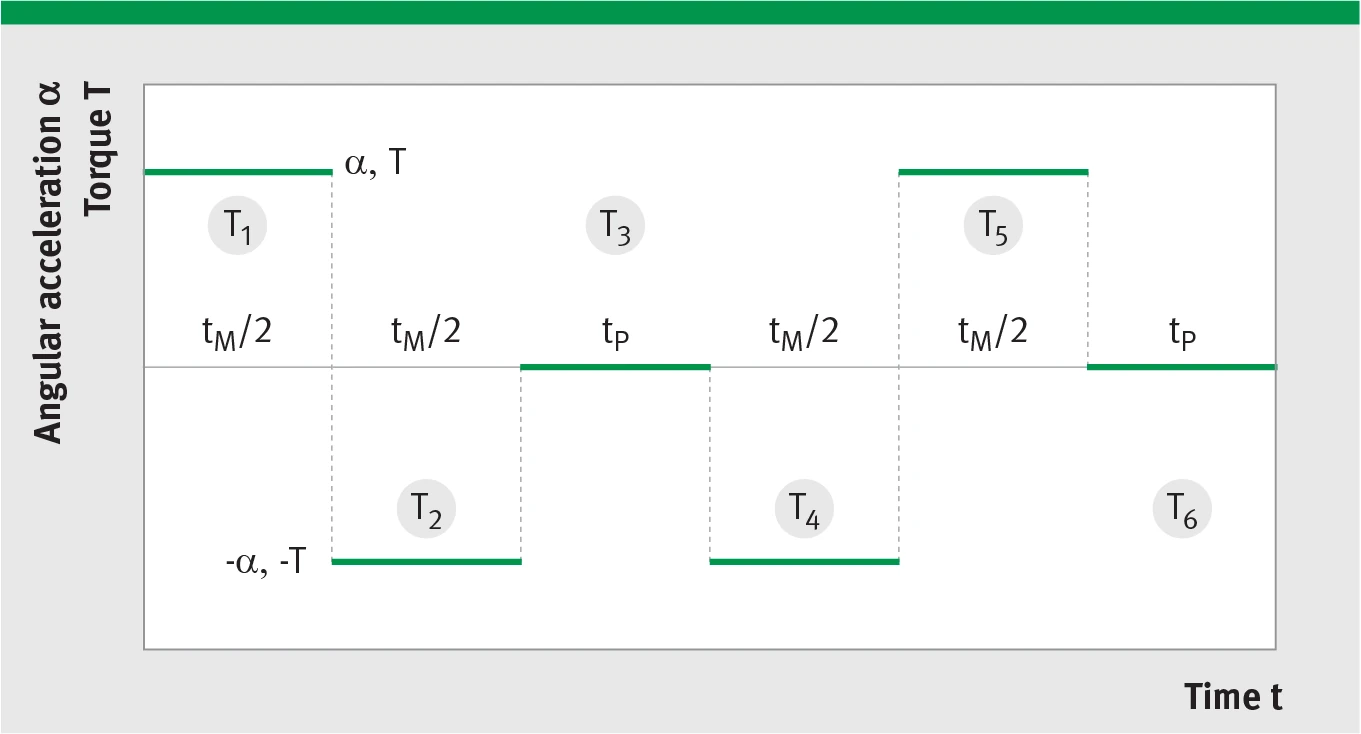
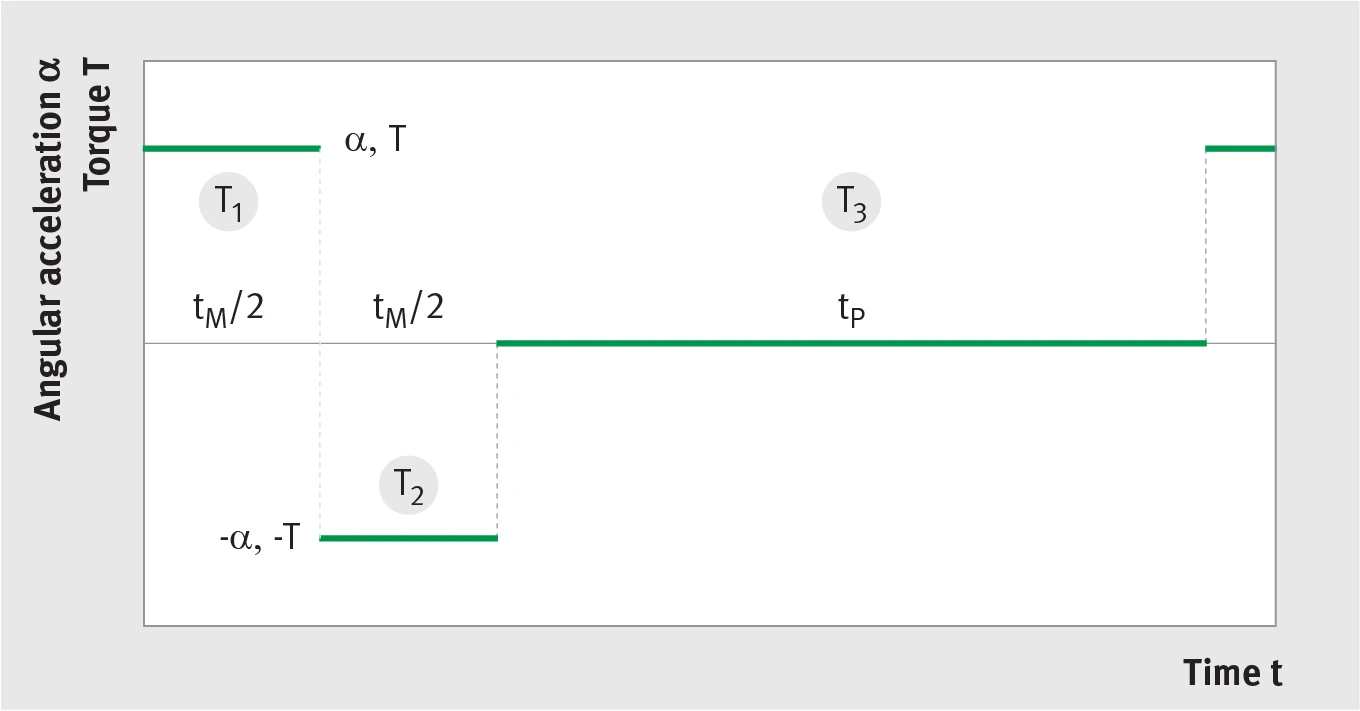
각가속도 α 및 토크 T 대 시간 t: T1–T6 6구간 토크 사이클, tM/2 및 tP 시간 구간 표시
원하는 리듬 사이클의 토크 흐름에 따라 모터는 세 가지 기준으로 선정됩니다:
- 사이클 내 최대 토크 M: 데이터 시트의 Tp (피크 토크)
- 사이클 내 유효 토크 M: 데이터 시트의 Tc (비냉각) 또는 Tcw (수냉)
- 사이클 내 최대 회전수 M: 데이터 시트의 nlp
유효 토크는 리듬 사이클에서 토크 곡선(6구간 토크 사이클)의 실효값(균방근값)과 같습니다:
Trms = √T12·t1 + T22·t2 + … + T62·t6t1 + t2 + … + t6
예시 계산에서 안전 계수 1.4는 토크-전류 특성의 비선형 영역에서의 모터 운전도 고려하며, 이 경우 Teff 계산 공식은 근사값에만 적용됩니다.
토크 T1 = T; T2 = −T; T3 = 0; T4 = −T; T5 = T; T6 = 0 및 시간 t1 = tM/2; t2 = tM/2; t3 = tP; t4 = tM/2; t5 = tM/2; t6 = tP로 유효 토크를 계산합니다:
Trms = Tnom × √tMtM + tP
이 방정식은 리듬 사이클에서 동일한 크기의 토크가 작용하는 경우(질량 관성 모멘트와 각가속도가 일정)의 유효 토크에 적용됩니다. 루트 기호 아래에는 "운동 시간의 합을 운동 시간과 정지 시간의 합으로 나눈 값"이 나타납니다. 분모가 사이클 시간입니다.
위치 결정 운동의 각가속도, 최대 각속도 및 최대 회전수 계산식:
α = 4 × φ / tM2
ωmax = α × tM / 2
nmax = 60 / (2 × π) × ωmax
| 기호 | 설명 | 단위 |
|---|---|---|
| φ | 위치 결정 각도 (Motion angle) | rad |
| tM | 운동 시간 (Motion time) | s |
| α | 각가속도 (Angular acceleration) | rad/s2 |
| ωmax | 최대 각속도 (Maximum angular speed) | rad/s |
| nmax | 최대 회전수 (Maximum rotary speed) | rpm |
서보 인버터에 저크 제한이 프로그래밍된 경우 위치 결정 시간이 그에 따라 연장됩니다. 이 경우 고정된 위치 결정 시간을 유지하려면 더 높은 가속도가 필요합니다.
회전 직접 구동 시스템 선정 예시 (Selection of Rotary Direct Drive Systems)
예시: 사이클 애플리케이션, 예: 테스트 시스템
| 사전 설정값 (Preset values) | 값 | 설명 |
|---|---|---|
| 질량 관성 모멘트 J [kgm2] | 0.018 | |
| 위치 결정 각도 φ [°] | 22.5 | |
| 마찰 토크 Tf [Nm] | 2 | |
| 설치 공간 D (최대 외경) [mm] | 180 | |
| 운동 시간 tM [ms] | 30 | |
| 안전 계수 (Safety factor) | 1.4 | |
| 정지 시간 tP [ms] | 60 |
위치 결정 각도를 라디안으로 변환:
φ = 180/π × 22.5° = 0.3927 rad
각 단계 계산 결과:
α = 4 × 0.3927 rad / (0.03 s)2 = 1745.33 rad/s2
ωmax = 1745.33 rad/s2 × 0.03 s / 2 = 26.18 rad/s
nmax = 60 / (2 × π) × 26.18 rad/s = 250 rpm
마찰 토크와 안전 계수를 포함하면 최대 안전 계수 토크가 산출됩니다:
Tnom = [(0.018 kgm2 × 1745.33 rad/s2) + 2 Nm] × 1.4 = 46.78 Nm
이 경우 가속 및 제동 토크가 같습니다. 유효 토크는 리듬 사이클에서 토크 곡선(6구간 토크 사이클)의 실효값과 같습니다:
Trms = 46.78 Nm × √0.03 s0.03 s + 0.06 s = 27.01 Nm
(6구간 토크 사이클 = 2 사이클)
시스템 선정 결과
두 선정 시스템 모두 최대 회전수 250 rpm을 달성할 수 있습니다.
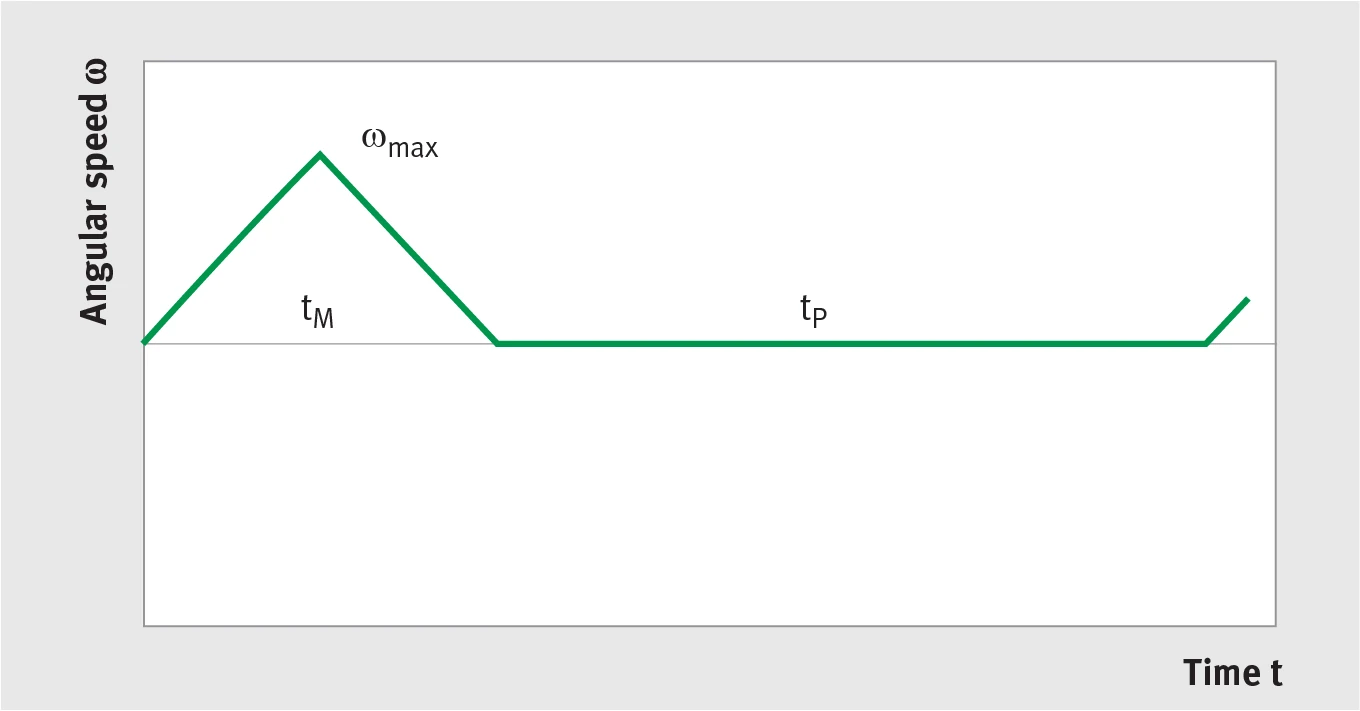
선정 예시: 각속도 ω 대 시간 t (ωmax, tM, tP)
선정 예시: 각가속도 α 및 토크 T 대 시간 t (T1–T3 단순화 사이클)
문의 및 선정
귀하의 애플리케이션에 대한 문의 및 선정을 위해 언제든지 당사에 연락하십시오.