Ưu điểm của truyền động thẳng quay (Advantages of Rotary Direct Drives)
Tăng khả năng động lực học
- Không cần chuyển đổi dạng chuyển động
- Hệ thống truyền động không có tính đàn hồi, khe hở ăn khớp, trễ và ma sát do các phần tử truyền động hoặc khớp nối gây ra.
- Động cơ đa cực
- Với thiết kế đa cực, động cơ IDAM có khả năng tạo ra mô-men xoắn rất cao, và mô-men xoắn cao này có thể sử dụng từ tốc độ quay > 0 cho đến tốc độ liên tục.
- Rotor dạng vành mỏng
- Nhờ thiết kế dạng vành mỏng với đường kính trong lớn và mở, động cơ có mô-men quán tính rotor rất thấp, cho phép khả năng gia tốc rất cao.
- Đo vị trí trực tiếp
- Nhờ đo vị trí trực tiếp và cấu trúc cơ khí cứng vững, việc định vị được thực hiện với động lực học cao và độ chính xác cao.
Giảm chi phí vận hành
- Không có thêm bộ phận chuyển động
- Công việc lắp ráp, điều chỉnh và bảo trì cho cụm truyền động được giảm thiểu.
- Hệ thống truyền động không mài mòn
- Ngay cả dưới tải trọng cao và tải trọng thay đổi thường xuyên, hệ thống truyền động vẫn cực kỳ bền bỉ, nhờ đó giảm thời gian ngừng máy.
- Tính khả dụng cao
- Ngoài tuổi thọ tăng cao và độ mài mòn giảm, độ bền của torque motor cũng nâng cao tính khả dụng của hệ thống.
Tăng tính linh hoạt thiết kế
- Trục rỗng (Hollow shaft)
- Với đường kính trong lớn và mở, thiết kế trục rỗng của torque motor cho phép sự linh hoạt thiết kế cao hơn nhiều. Trục rỗng cho phép ống dẫn, đồ gá, khớp nối quay và dây điện chạy qua tâm động cơ.
- Tích hợp linh kiện RDDS
- Nhờ không gian cần thiết nhỏ hơn, hệ thống có thể dễ dàng tích hợp vào thiết kế máy.
- Thiết kế nhỏ gọn
- Cùng với đường kính trong lớn và mở (trục rỗng), hệ thống rất nhỏ gọn so với mô-men xoắn đầu ra.
- Số lượng linh kiện ít
- Thiết kế trưởng thành giúp tích hợp hệ thống vào tổng thể concept máy. Ít linh kiện hơn và bền hơn dẫn đến tỷ lệ hỏng hóc thấp (MTBF* cao).
*MTBF: Mean Time Between Failures (Thời gian trung bình giữa các lần hỏng hóc)
Ưu điểm hệ thống (System Advantages)
- Động lực học và độ cứng vững cao (High dynamics and stiffness)
- Chuyển động cực kỳ êm ái (Extremely smooth motion)
- Gia tốc cao (High acceleration)
- Tốc độ cao (High velocity)
- Thiết kế nhỏ gọn (Compact design)
- Lắp ráp dễ dàng (Easy assembly)
- Độ cứng vững tải tĩnh và động xuất sắc (Excellent static and dynamic load rigidity)
- Không khe hở ăn khớp (No backlash)
- Hệ thống ít mài mòn và ít bảo trì (Low-wear and low-maintenance system)
- Quán tính nhỏ (Small inertia)
- Mô-men xoắn đỉnh Tp: 8.9 – 369 Nm
- Hệ thống đo lường (Measuring system): Nguyên lý đo quang học, nhiều số chia tùy theo kiểu
- Ổ lăn (Bearing): Nhỏ gọn, chịu mô-men nghiêng ngoài cao, độ cứng vững và độ chính xác cao, độ đảo dọc trục và hướng kính rất thấp
- Đường kính trong tự do (Free inner diameter)
Kết cấu tiêu chuẩn (Standard Design)
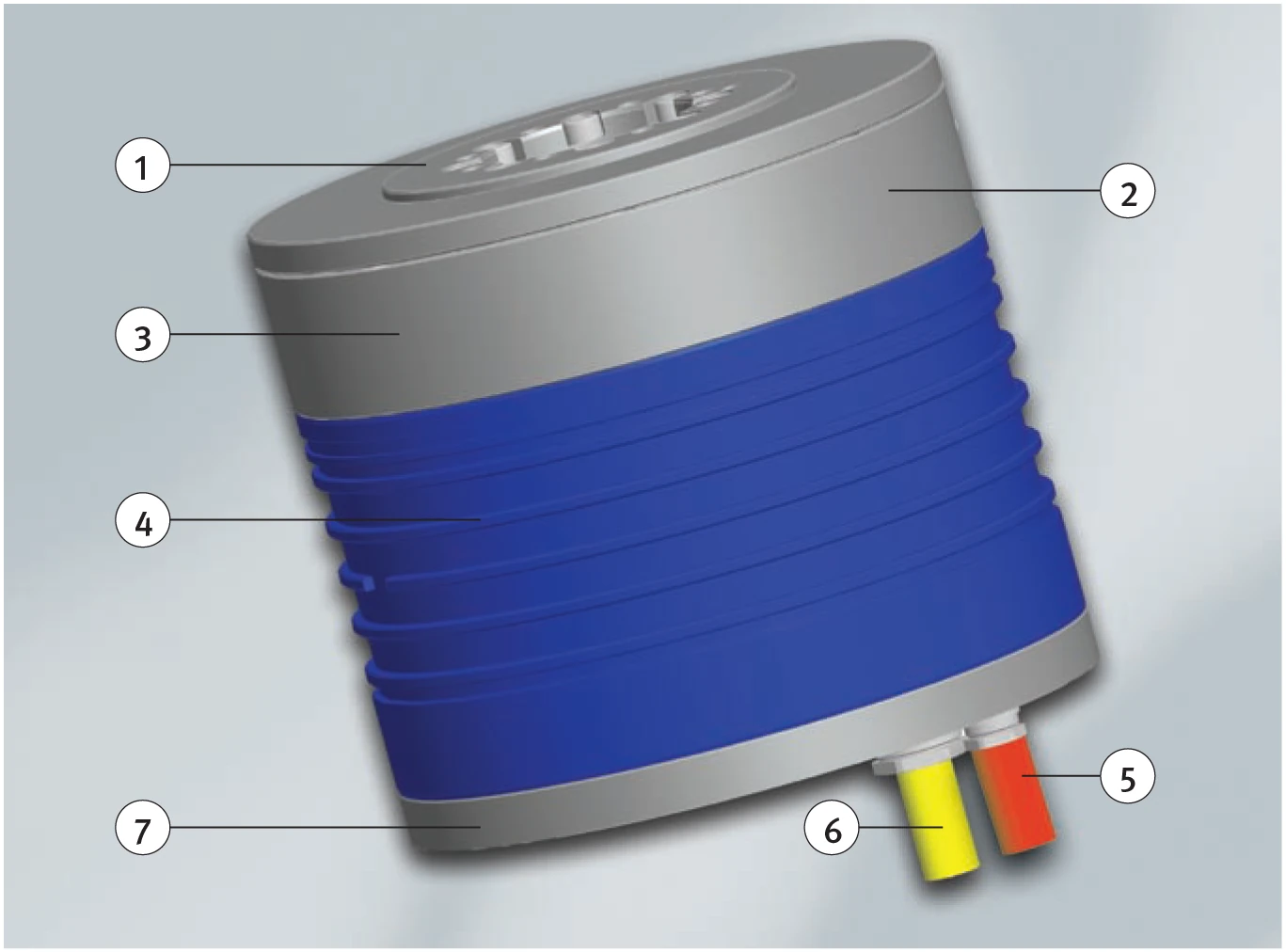
Kết cấu tiêu chuẩn RDDS: vị trí linh kiện 1 (tấm bệ) đến 7 (tấm đế)
Kết cấu tiêu chuẩn RDDS bao gồm bảy linh kiện chính sau:
Bảo vệ nhiệt động cơ (Thermal Motor Protection)
Mạch giám sát I và II (Monitoring Circuit I and II)
Truyền động thẳng thường hoạt động ở giới hạn hiệu suất nhiệt. Ngoài ra, trong quá trình vận hành có thể xảy ra quá tải không lường trước làm tăng tải dòng điện vượt quá dòng điện định mức cho phép. Vì lý do này, bộ điều khiển servo cho động cơ thường phải có bảo vệ quá tải để kiểm soát dòng điện động cơ. Giá trị hiệu dụng (giá trị căn bình phương trung bình) của dòng điện động cơ chỉ được phép vượt quá dòng điện định mức cho phép trong thời gian ngắn. Loại giám sát nhiệt độ gián tiếp này rất nhanh và đáng tin cậy.
Động cơ IDAM được trang bị cảm biến nhiệt độ (PTC và KTY) dùng cho bảo vệ nhiệt động cơ.
Mạch giám sát I (Monitoring Circuit I)
Ba cuộn dây pha được trang bị ba PTC mắc nối tiếp để đảm bảo bảo vệ động cơ. PTC là điện trở nhiệt hệ số nhiệt độ dương (Positive Temperature Coefficient thermistor). Hằng số thời gian nhiệt khi lắp đặt dưới 5 s.
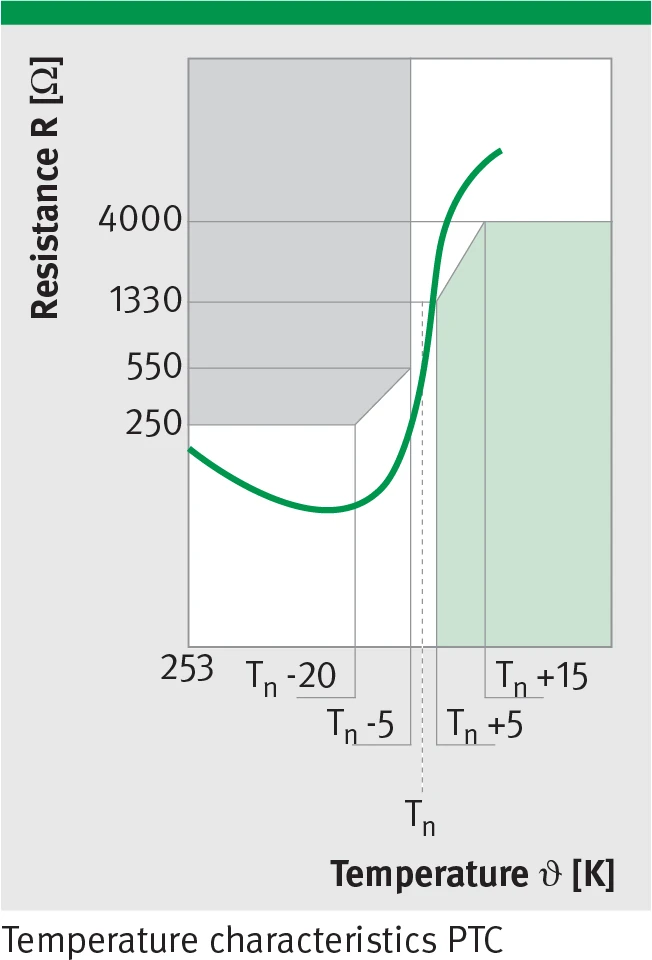
Đặc tính nhiệt độ PTC: điện trở R [Ω] theo nhiệt độ ϑ [K]; điện trở tăng đột ngột khi vượt nhiệt độ đáp ứng định mức Tn
Đặc tính nhiệt độ PTC (Temperature Characteristics PTC)
Điện trở R [Ω] theo nhiệt độ ϑ [K] (trích từ nguồn):
| Nhiệt độ | Tn-20 | Tn-5 | Tn | Tn+5 | Tn+15 |
|---|---|---|---|---|---|
| Điện trở R [Ω] | 250 | 550 | 1330 | 4000 | — |
Tn: Nhiệt độ đáp ứng định mức (Nominal response temperature)
Không giống như KTY, điện trở PTC tăng rất mạnh khi vượt quá nhiệt độ đáp ứng định mức Tn, tăng lên nhiều lần so với giá trị nguội. Với ba phần tử PTC mắc nối tiếp, hành vi này cũng tạo ra sự thay đổi rõ ràng trong điện trở tổng ngay cả khi chỉ một phần tử vượt quá Tn. Việc sử dụng ba cảm biến đảm bảo rằng, ngay cả khi động cơ đứng yên dưới tải pha không đối xứng, vẫn có tín hiệu để dừng an toàn.
Thiết bị bảo vệ ngắt động cơ thương mại thường kích hoạt trong khoảng 1,5 đến 3,5 kΩ. Nhờ đó, tình trạng quá nhiệt được phát hiện với sai số vài độ cho mỗi cuộn dây. Thiết bị ngắt cũng phản ứng nếu điện trở trong mạch PTC quá thấp, thường cho thấy lỗi trong mạch giám sát. Nó cũng đảm bảo sự cách điện an toàn giữa bộ điều khiển và các cảm biến trong động cơ. Thiết bị ngắt bảo vệ động cơ không nằm trong phạm vi cung cấp.
Lưu ý: PTC không phù hợp để đo nhiệt độ. Nên dùng KTY nếu cần. Các cảm biến giám sát bổ sung có thể được tích hợp theo yêu cầu của khách hàng. Về nguyên tắc, tín hiệu cảm biến PTC phải được giám sát để bảo vệ chống quá nhiệt.
Mạch giám sát II (Monitoring Circuit II)
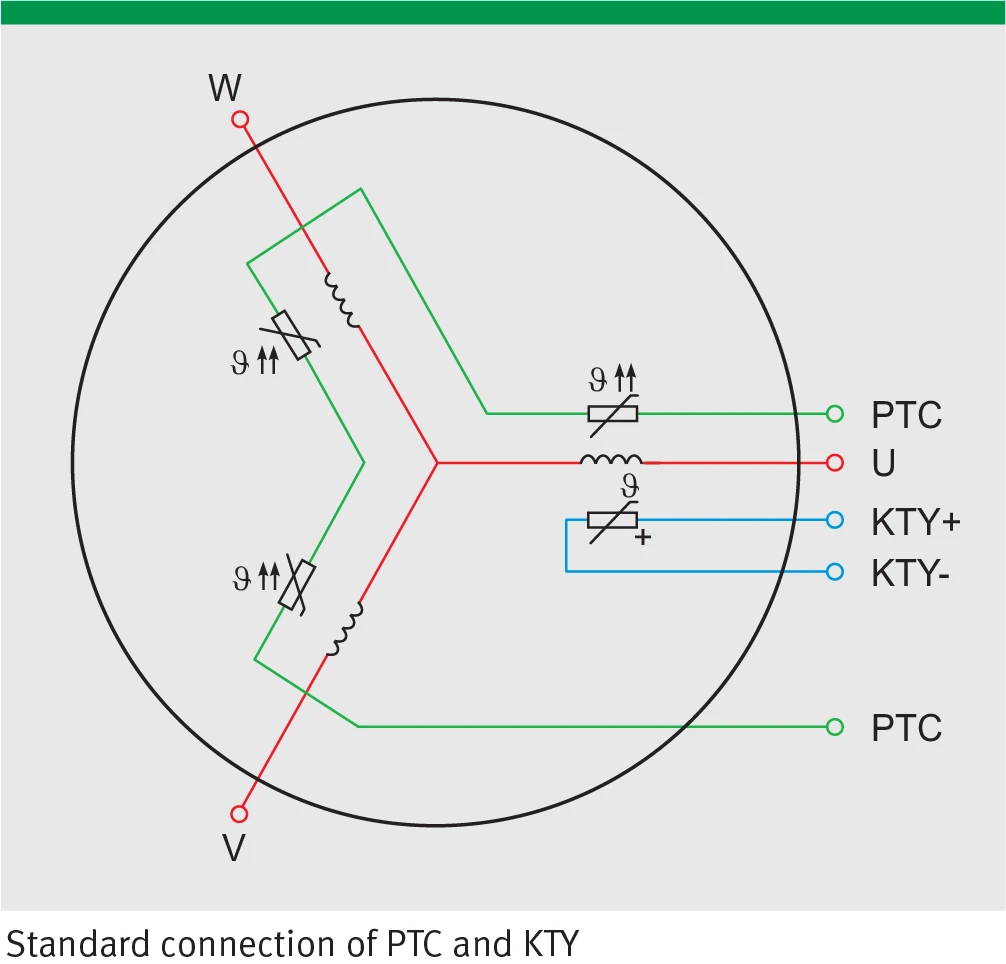
Đấu dây tiêu chuẩn PTC và KTY: ba cuộn dây pha (U, V, W) mỗi pha lắp PTC; một pha (U) lắp KTY84-130
Một pha của động cơ có thêm KTY84-130. Cảm biến này là điện trở bán dẫn có hệ số nhiệt độ dương (semiconductor resistor with positive temperature coefficient).
Tín hiệu tương đương nhiệt độ được tạo ra với độ trễ phụ thuộc vào loại động cơ. Để bảo vệ động cơ tránh quá nhiệt, giới hạn ngắt được định nghĩa trong bộ điều khiển. Khi động cơ đứng yên, dòng điện không đổi chạy qua các cuộn dây, với dòng điện phụ thuộc vào vị trí cực tương ứng.
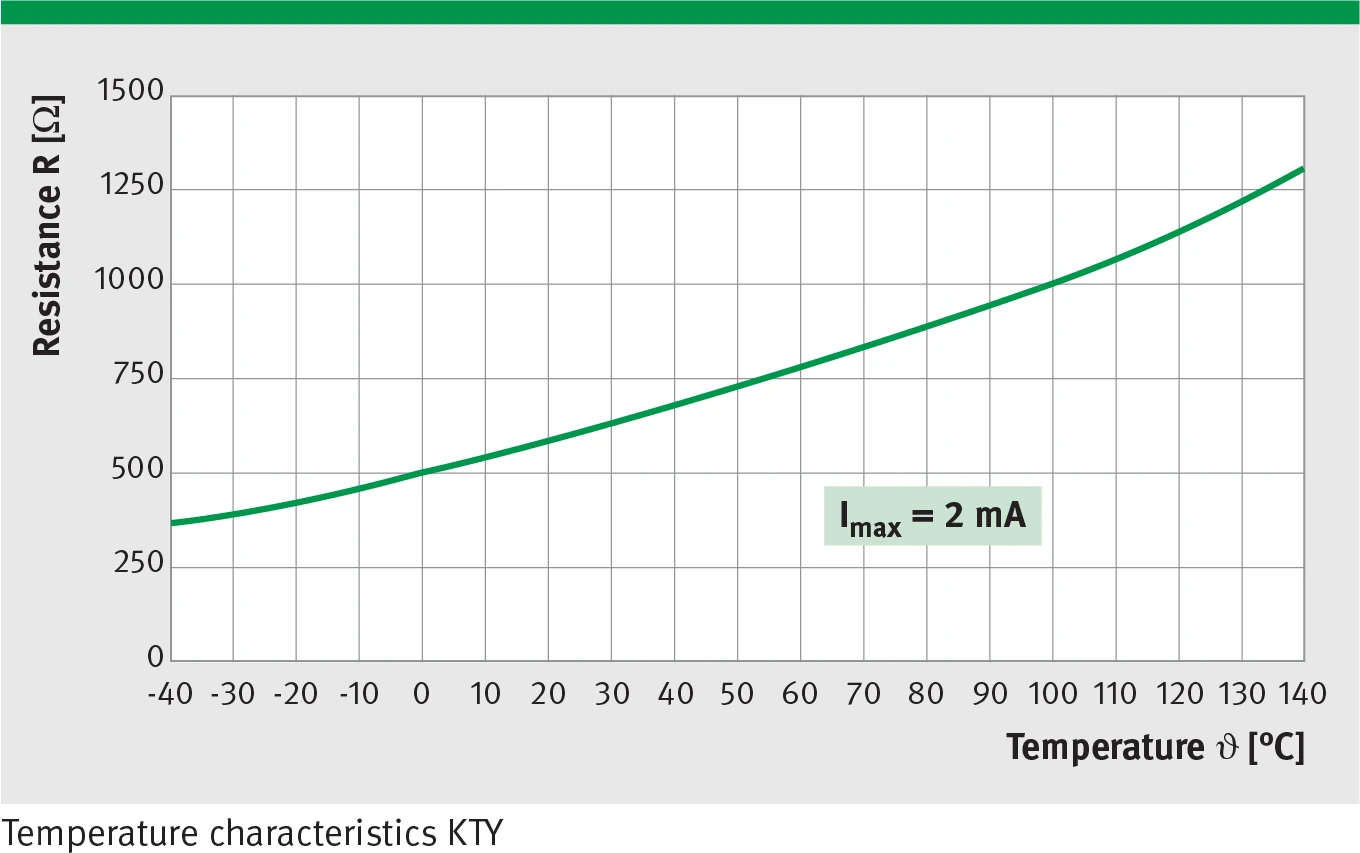
Đặc tính nhiệt độ KTY: điện trở R [Ω] theo nhiệt độ ϑ [°C] (−40 đến 140 °C), dòng đo Imax = 2 mA
Do đó động cơ không nóng đều, có thể gây quá nhiệt ở các cuộn dây không được giám sát. Cảm biến PTC và KTY có cách điện cơ bản với động cơ. Chúng không phù hợp để kết nối trực tiếp với mạch PELV/SELV theo tiêu chuẩn DIN EN 50178.
Lưu ý: Cảm biến KTY chỉ giám sát một cuộn dây đơn. Tín hiệu của nó có thể dùng để giám sát nhiệt độ hoặc cảnh báo. Không được phép dùng độc lập để ngắt.
Kết nối điện (Electrical Connections)
Các kết nối cáp tiêu chuẩn của ma trận RDDS1 là hướng trục, vị trí được xác định trong bản vẽ. Chiều dài cáp từ đầu ra động cơ là 1,0 m, đầu dây mở và lắp đầu cuối. Các cáp sử dụng được chứng nhận UL và phù hợp với xích cáp kéo (cable drag chains).
Tùy chọn, hệ thống quay có thể cung cấp với phích cắm gắn trực tiếp trên vỏ hoặc với phích nối cáp đầu dây.
Chiều quay dương của hệ thống
Chiều quay tiêu chuẩn của tấm bệ (stage plate) là ngược chiều kim đồng hồ, nhưng có thể thay đổi tùy theo loại kết nối.
Cấu hình chân — Kết nối cáp (tiêu chuẩn)
Loại cáp: 4G1.5 + 2x (2x0.75) KAWEFLEX 5281, Ø 12,6 mm, bán kính uốn động 95 mm, bán kính uốn tĩnh 63 mm
| Động cơ (Motor) | |
|---|---|
| Lõi (Core) | Tín hiệu (Signal) |
| 1 | Pha U (Phase U) |
| 2 | Pha V (Phase V) |
| 3 | Pha W (Phase W) |
| GNYE | PE |
| 5 | PTC (3x nối tiếp, tất cả các pha) |
| 6 | PTC (3x nối tiếp, tất cả các pha) |
| 7 | + Cảm biến nhiệt độ KTY84-130 (một pha) |
| 8 | - Cảm biến nhiệt độ KTY84-130 (một pha) |
| Shield | |
Loại cáp: 12x0.08 NJ AWM STYLE 20963, Ø 3,7 mm, bán kính uốn động 40 mm, bán kính uốn tĩnh 8 mm
| Hệ thống đo lường 1 Vpp (Measuring system 1 Vpp) | |
|---|---|
| Lõi (Core) | Tín hiệu (Signal) |
| GN | U1+ |
| BN | U1- |
| BK | U2+ |
| RD | U2- |
| GY | U0+ |
| PK | U0- |
| WH | GND |
| BU | +5 V |
| Shield | |
Cấu hình chân — Kết nối phích cắm (tùy chọn)
RDDS1-130xH: Phích cắm gắn M17 9 cực
| Động cơ (Motor) — Phích cắm gắn M17 9 cực | |
|---|---|
| Chân (Pin) | Tín hiệu (Signal) |
| 1 | Pha U (Phase U) |
| 2 | Pha V (Phase V) |
| 3 | Pha W (Phase W) |
| PE | PE |
| A | PTC (3x nối tiếp, tất cả các pha) |
| B | PTC (3x nối tiếp, tất cả các pha) |
| C | NC |
| D | + Cảm biến nhiệt độ KTY84-130 (một pha) |
| E | - Cảm biến nhiệt độ KTY84-130 (một pha) |
| Case | Shield |
| Hệ thống đo lường 1 Vpp — Phích cắm gắn M17 17 cực | |
|---|---|
| Chân (Pin) | Tín hiệu (Signal) |
| 1 | +5 V Sense |
| 2 | NC |
| 3 | NC |
| 4 | GND Sense |
| 5 | NC |
| 6 | NC |
| 7 | +5 V |
| 8 | NC |
| 9 | NC |
| 10 | GND |
| 11 | NC |
| 12 | U2+ |
| 13 | U2- |
| 14 | U0+ |
| 15 | U1+ |
| 16 | U1- |
| 17 | U0- |
| Case | Shield |
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH và biến thể kết nối MA/MU/MD (tất cả kích thước)
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH sử dụng phích cắm gắn M23 8 cực; biến thể kết nối MA/MU/MD (tất cả kích thước) sử dụng phích nối cáp M23 8 cực (tại đầu dây cáp).
| Động cơ (Motor) — Phích cắm gắn M23 8 cực | |
|---|---|
| Chân (Pin) | Tín hiệu (Signal) |
| 1 | Pha U (Phase U) |
| 4 | Pha V (Phase V) |
| 3 | Pha W (Phase W) |
| 2 / PE | PE |
| A | PTC (3x nối tiếp, tất cả các pha) |
| B | PTC (3x nối tiếp, tất cả các pha) |
| C | + Cảm biến nhiệt độ KTY84-130 (một pha) |
| D | - Cảm biến nhiệt độ KTY84-130 (một pha) |
| Case | Shield |
| Hệ thống đo lường 1 Vpp — Phích cắm gắn / phích nối M23 12 cực | |
|---|---|
| Chân (Pin) | Tín hiệu (Signal) |
| 1 | U2- |
| 2 | +5 V Sense |
| 3 | U0+ |
| 4 | U0- |
| 5 | U1+ |
| 6 | U1- |
| 7 | NC |
| 8 | U2+ |
| 9 | NC |
| 10 | GND |
| 11 | GND Sense |
| 12 | +5 V |
| Case | Shield |
Chuyển mạch (Commutation)
Hệ thống truyền động thẳng quay ưu tiên hoạt động ở chế độ chuyển mạch (commutated). Theo tiêu chuẩn, torque motor IDAM không được trang bị cảm biến Hall. IDAM khuyến nghị sử dụng phương pháp chuyển mạch liên quan đến hệ thống đo lường, vì phương pháp này được hỗ trợ bởi các bộ biến tần servo và bộ điều khiển hiện đại.
Cường độ cách điện (Insulation Strength)
Cường độ cách điện cho điện áp mạch đến 600 VDC.
Động cơ IDAM tuân thủ chỉ thị EC 73/23/EEC và các tiêu chuẩn châu Âu EN 50178 và EN 60204. Trước khi xuất xưởng, chúng được kiểm tra bằng phương pháp thử điện áp cao phân biệt và đổ keo trong môi trường chân không. Hãy đảm bảo tuân thủ điện áp làm việc liên quan đến từng kiểu động cơ.
Quá điện áp tại đầu cực động cơ khi vận hành bộ biến đổi
Do các bộ bán dẫn công suất chuyển mạch cực nhanh tạo ra tải du/dt cao, đỉnh điện áp cao hơn đáng kể so với điện áp bộ biến đổi thực tế có thể xuất hiện tại các đầu cực động cơ, đặc biệt khi sử dụng cáp kết nối dài hơn (từ khoảng 5 m) giữa động cơ và bộ biến đổi. Điều này đặt tải trọng rất cao lên cách điện động cơ.
Lưu ý:
- Giá trị du/dt của mô-đun PWM không được vượt quá 8 kV/µs.
- Cáp kết nối động cơ phải được giữ ngắn nhất có thể.
- Để bảo vệ động cơ, luôn sử dụng máy hiện sóng trong cấu hình cụ thể để đo điện áp (PWM) đặt lên động cơ qua cuộn dây và so với PE. Các đỉnh điện áp hiện tại không nên vượt quá đáng kể 1 kV. Từ khoảng 2 kV nên dự kiến sự hư hỏng dần của cách điện.
- Vui lòng tuân thủ các khuyến nghị và lưu ý cấu hình do nhà sản xuất bộ điều khiển cung cấp.
Kỹ sư IDAM sẽ hỗ trợ bạn trong ứng dụng và giúp xác định và giảm điện áp quá cao.
Làm mát và mạch làm mát (Cooling and Cooling Circuit)
Tổn thất công suất và tổn thất nhiệt
Ngoài tổn thất công suất được xác định bởi hằng số động cơ km, động cơ còn chịu các tổn thất phụ thuộc tần số, đặc biệt ở tần số điều khiển cao hơn (trên 50 Hz). Các tổn thất này cộng lại gây ra sự tăng nhiệt của động cơ và các cụm hệ thống khác.
Quy tắc sau áp dụng ở tần số điều khiển thấp (< 80 Hz) của động cơ: Động cơ có hằng số động cơ km cao tạo ra tổn thất công suất thấp hơn so với các động cơ tương đương có hằng số động cơ thấp hơn.
Tổn thất công suất sinh ra trong quá trình vận hành động cơ được truyền qua cụm động cơ đến các linh kiện gắn kết. Toàn bộ hệ thống được thiết kế cẩn thận để kiểm soát cách phân bố nhiệt được ảnh hưởng và kiểm soát thông qua đối lưu, dẫn nhiệt và bức xạ.
Mô-men xoắn liên tục của động cơ làm mát bằng chất lỏng cao khoảng gấp đôi so với động cơ không làm mát. Hệ thống truyền động thẳng quay phải được lựa chọn và tích hợp vào concept máy theo yêu cầu về không gian lắp đặt, độ chính xác và làm mát.
Làm mát tích cực nên được ưu tiên sử dụng trên các máy hiệu suất cao và thiết bị vận hành có động lực học cao và tải ổ lăn tương ứng cao.
Thiết kế làm mát
Làm mát hệ thống được thiết kế theo kiểu làm mát áo (jacket cooling) và khách hàng cần kết nối vào mạch làm mát của thiết bị làm mát. Áo làm mát được cung cấp tùy chọn như một phần của động cơ hoặc đã là phần tích hợp của kết cấu máy do khách hàng cung cấp.
Môi chất làm mát (cooling medium) chạy từ cửa vào đến cửa ra qua các lỗ trên cánh làm mát ở các độ cao khác nhau. Các đầu nối vào và ra có thể được phân bổ cho hai đầu nối theo yêu cầu. Khu vực lưu lượng được bịt kín với các vòng O-ring.
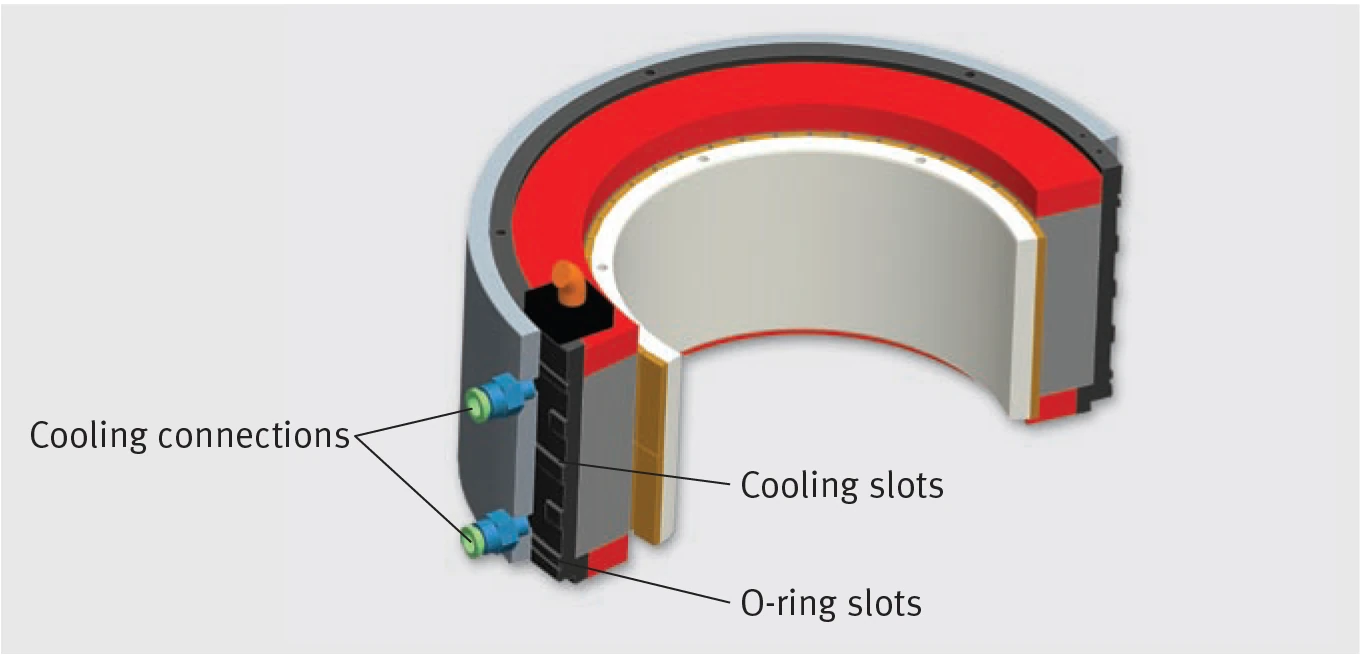
Mặt cắt áo làm mát: vị trí các đầu nối làm mát, rãnh làm mát và rãnh O-ring
Lưu ý: Khi sử dụng nước làm chất làm mát, phải dùng phụ gia để ngăn ngừa ăn mòn và cặn sinh học trong mạch làm mát.
Sự phụ thuộc vào nhiệt độ cấp môi chất làm mát (Dependency of Characteristic Data on the Supply Temperature of Cooling Medium)
Dòng điện liên tục Icw ghi trong bảng dữ liệu cho hoạt động làm mát bằng nước có thể đạt được ở nhiệt độ cấp định mức ϑnV = 25 °C. Nhiệt độ cấp ϑV cao hơn dẫn đến giảm hiệu suất làm mát và do đó cũng giảm dòng điện định mức. Dòng điện liên tục giảm Ic red có thể được tính theo phương trình bậc hai sau:
Ic red = Icw × √ϑmax − ϑVϑmax − ϑnV
| Ký hiệu | Mô tả | Đơn vị |
|---|---|---|
| Ic red | Dòng điện liên tục giảm (Reduced continuous current) | A |
| Icw | Dòng điện liên tục, làm mát tại ϑnV (Continuous current, cooled at ϑnV) | A |
| ϑV | Nhiệt độ cấp hiện tại (Current supply temperature) | °C |
| ϑnV | Nhiệt độ cấp định mức (Rated supply temperature) | °C |
| ϑmax | Nhiệt độ cuộn dây tối đa cho phép (Maximum permissible winding temperature, áp dụng cho dòng điện động cơ không đổi) | °C |
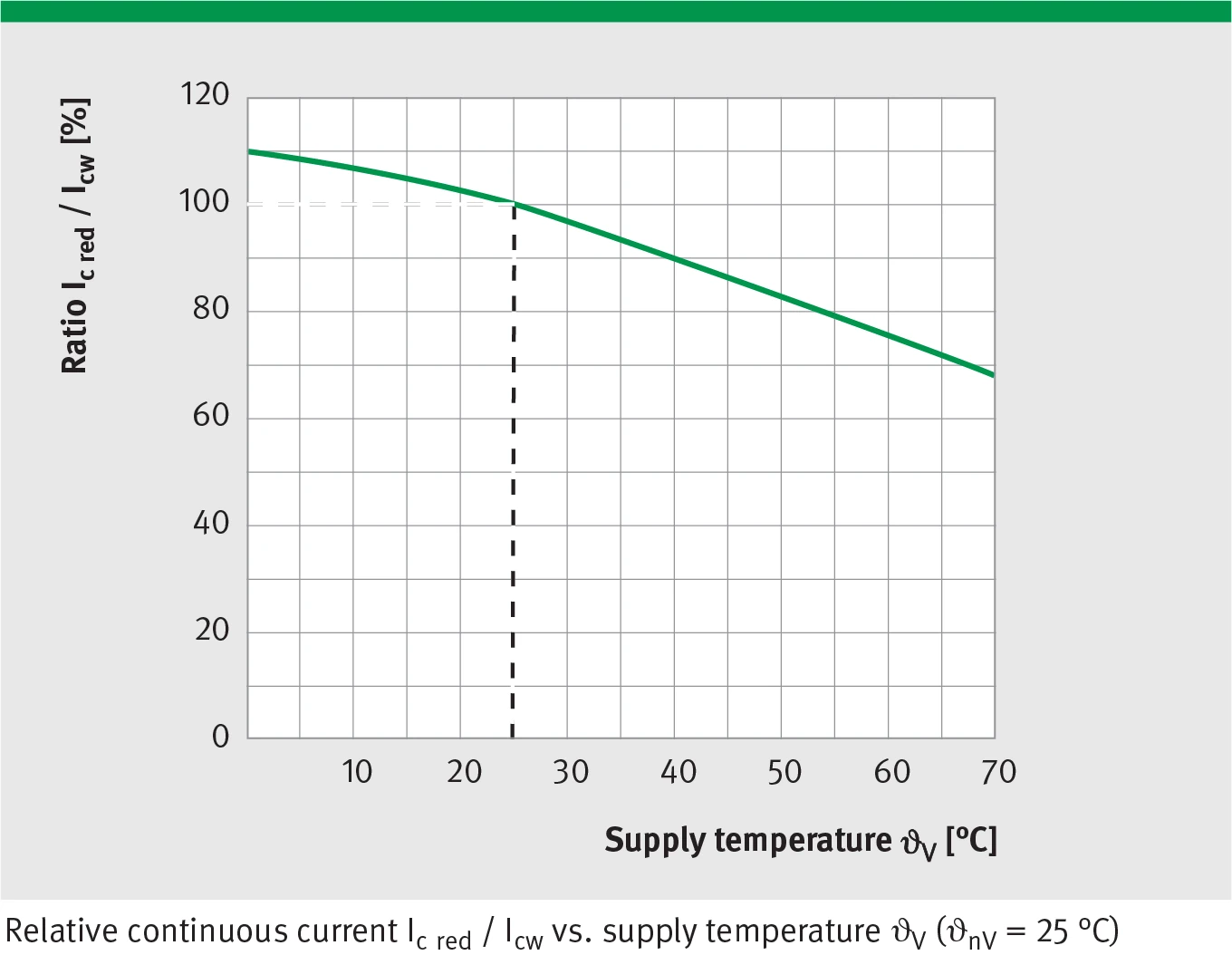
Dòng điện liên tục tương đối Ic red / Icw [%] theo nhiệt độ cấp ϑV [°C] (nhiệt độ cấp định mức ϑnV = 25 °C)
Chu kỳ định vị (Positioning Cycle)
Ví dụ chu kỳ định vị sau sử dụng hệ thống RDDS1-160x195-S-B-CA-WM-9000:
Thông số hệ thống ví dụ
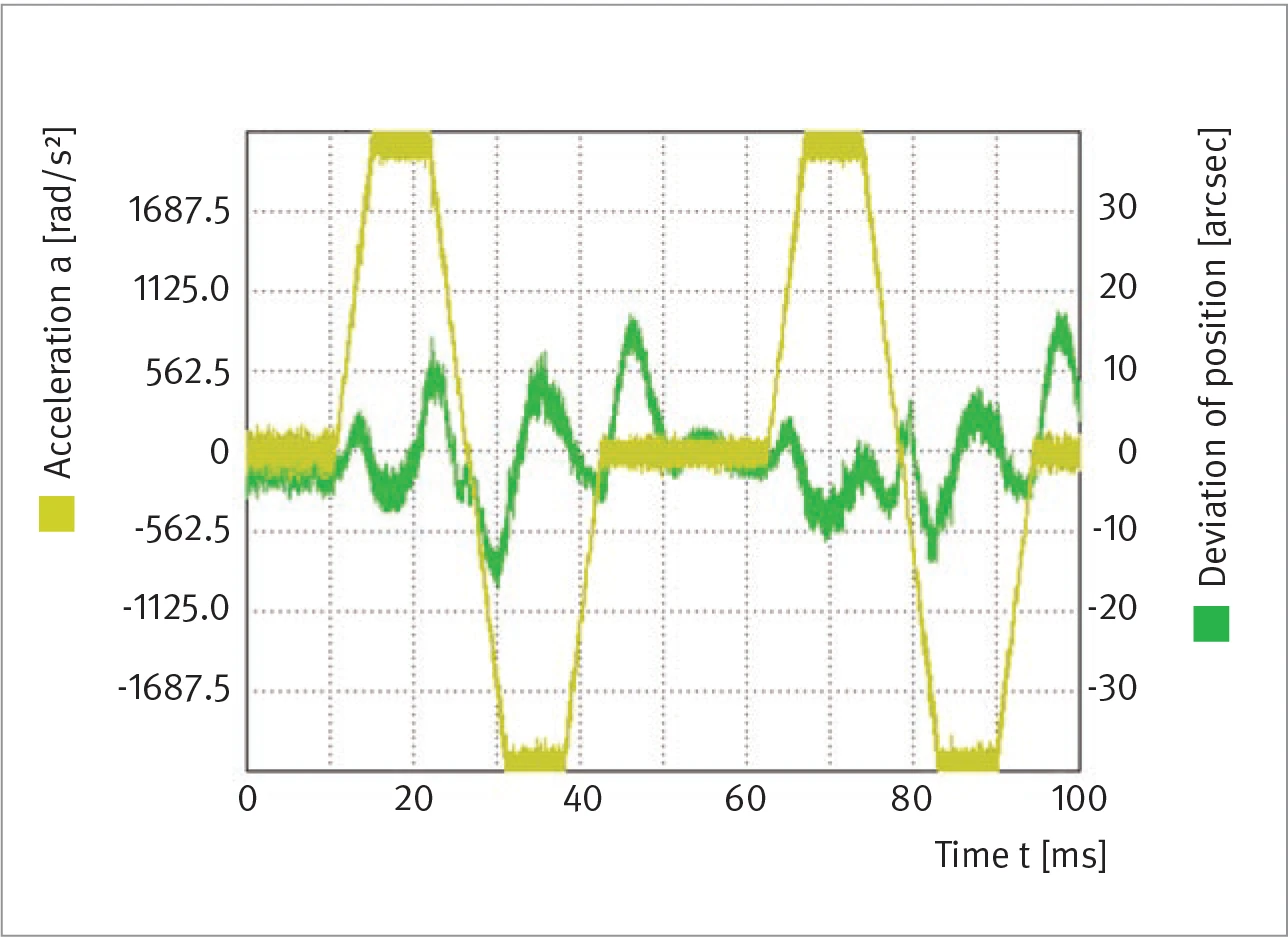
Chu kỳ định vị (trái): gia tốc góc a [rad/s²] và sai lệch vị trí [arcsec] theo thời gian t [ms]
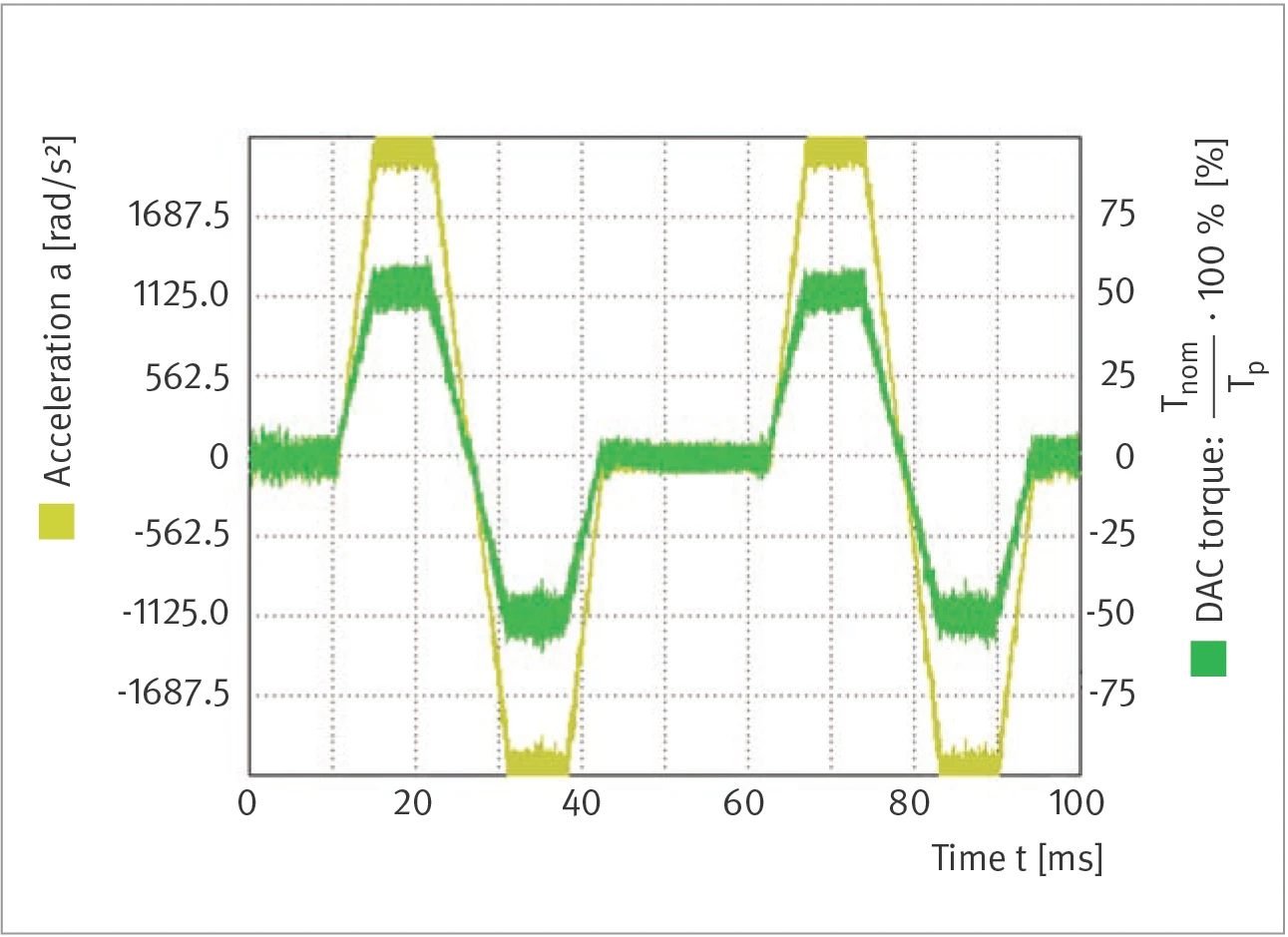
Chu kỳ định vị (phải): gia tốc góc a [rad/s²] và mô-men xoắn DAC [% Tnom/Tp] theo thời gian t [ms]
Tp: Mô-men xoắn đỉnh (Peak torque); Tnom: Mô-men xoắn định mức (Nominal torque)
Cấu hình hệ thống (System Configuration)
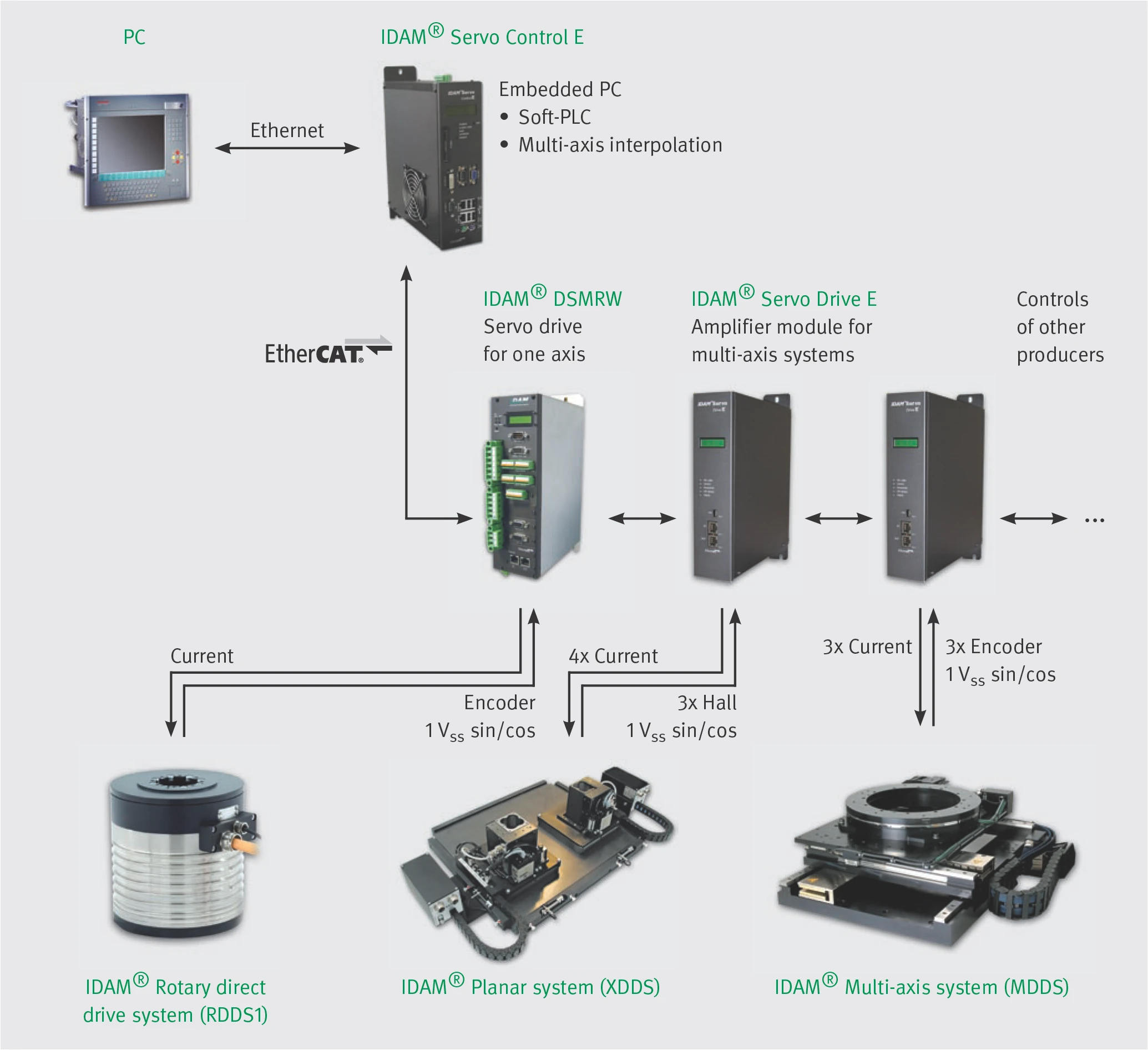
Cấu hình hệ thống: kết nối RDDS1, IDAM DSMRW, Servo Control E, Servo Drive E và PC (Ethernet/EtherCAT), hỗ trợ hệ thống phẳng XDDS và hệ thống đa trục MDDS
Hệ thống truyền động thẳng quay (RDDS1) có thể vận hành với các kiến trúc điều khiển sau:
- IDAM® DSMRW: Servo drive một trục, hoặc bộ điều khiển của nhà sản xuất khác
- Phản hồi dòng điện (Current feedback)
- Encoder 1 Vss sin/cos
- IDAM® Servo Control E + IDAM® Servo Drive E (mô-đun khuếch đại cho hệ thống đa trục)
- Kết nối Ethernet đến PC (Embedded PC với Soft-PLC và nội suy đa trục)
- Hỗ trợ hệ thống IDAM® RDDS1 (quay), IDAM® XDDS (phẳng), IDAM® MDDS (đa trục)
- Bộ điều khiển của nhà sản xuất khác (Controls of other producers)
Tải trọng bổ sung (Additional Loads)
Các hình ảnh sau đây mô tả các trường hợp chịu tải có thể xảy ra của hệ thống quay. Lực ngoài hoặc khối lượng bổ sung gây ra các tải trọng nhất định lên hệ thống quay tùy thuộc vào điểm đặt lực và vị trí.
Lực dọc trục và tải trọng dọc trục
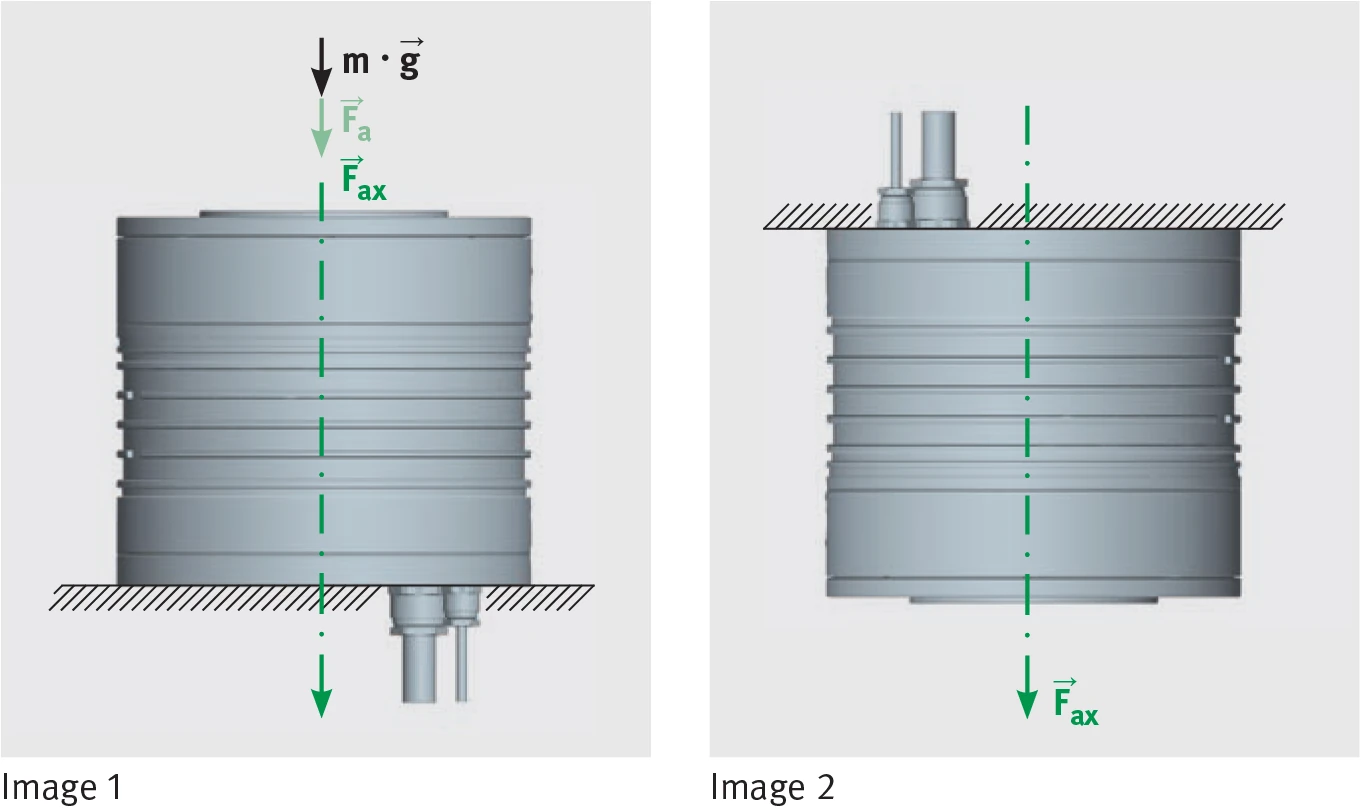
Hình 1 và 2: lực dọc trục hợp lực Fax = Fa + m × g cho bố trí đồng tâm (hai hướng lắp đặt)
Lực ngoài tác dụng vào tâm, có đường tác dụng trùng với trục quay (Fa), cũng như các khối lượng bổ sung bố trí đồng tâm (m), sẽ tạo ra lực dọc trục hợp lực (Fax) nếu hệ thống quay được lắp đặt như hình 1 và hình 2:
Fax = Fa + m × g
Mô-men nghiêng (Lệch tâm dọc trục)
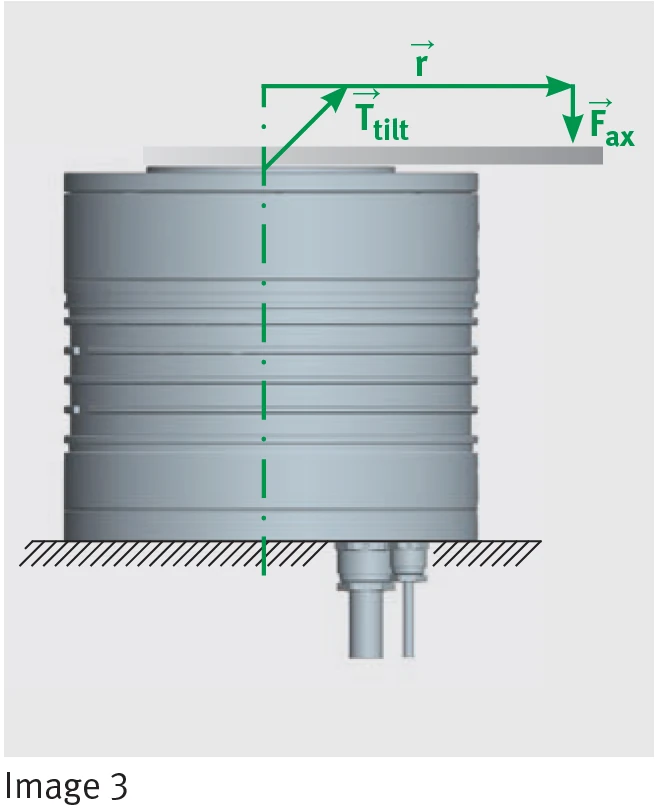
Hình 3: độ lệch tâm r tạo mô-men nghiêng Ttilt (lắp đặt hướng lên)
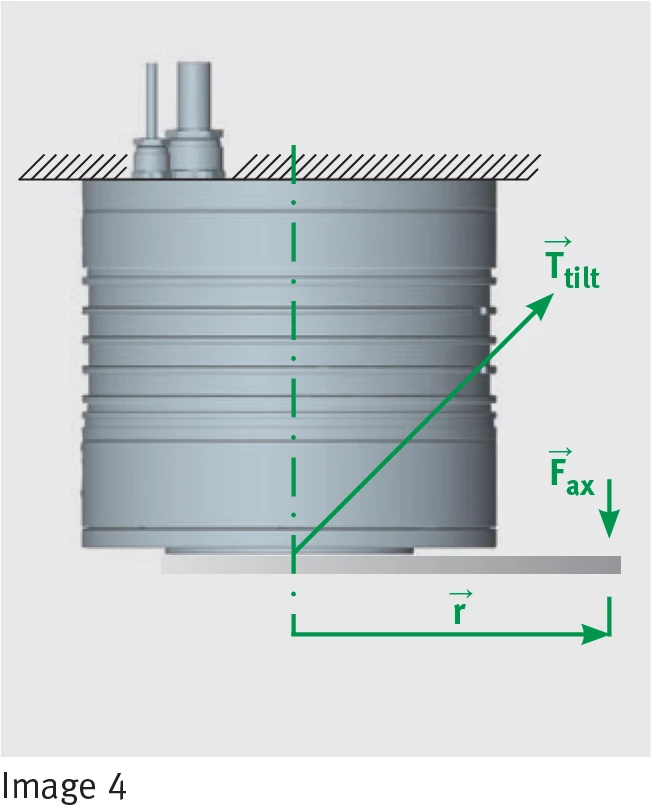
Hình 4: độ lệch tâm r tạo mô-men nghiêng Ttilt (lắp đặt hướng xuống)
Nếu lực dọc trục hợp lực (Fax) lệch tâm so với trục quay với khoảng cách (r) (hình 3 và hình 4), hệ thống quay sẽ chịu thêm mô-men nghiêng:
Ttilt = r × Fax
Trong trường hợp cánh tay đòn và lực vuông góc với nhau:
|Ttilt| = |r| × |Fax| × sin 90°
Ttilt = r × Fax
Lực hướng kính và mô-men nghiêng
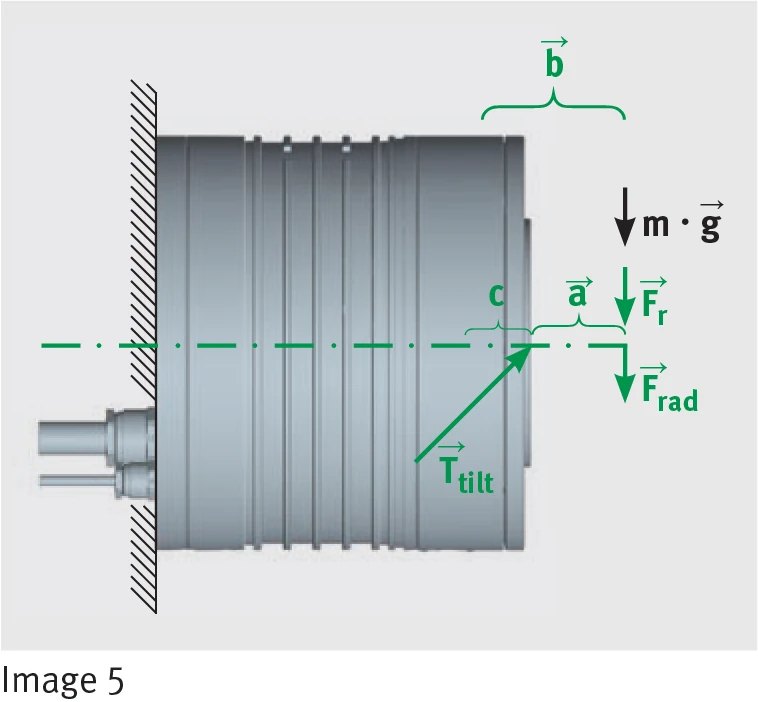
Hình 5: lực hướng kính Fr, lực hướng kính hợp lực Frad, khoảng cách a, b, c và mô-men nghiêng Ttilt (lắp đặt nằm ngang)
Lực ngoài (Fr) tác dụng hướng kính vào tâm, có đường tác dụng vuông góc với trục quay, cũng như các khối lượng bổ sung bố trí đồng tâm (m), sẽ tạo ra tải hướng kính hợp lực (Frad) nếu hệ thống quay được lắp đặt như hình 5:
Frad = Fr + m × g
Điểm đặt lực của lực hướng kính (Frad) thường ở khoảng cách (a) từ tấm bệ và tải trọng hướng kính gây thêm tải mô-men nghiêng. Mô-men nghiêng theo hình 5 là:
Ttilt = b × Frad
Nếu cánh tay đòn và lực vuông góc với nhau, mô-men nghiêng tương tự như trên:
|Ttilt| = |b| × |Frad| × sin 90°
Ttilt = b × Frad
Khoảng cách b theo hình 5 là:
b = a + c
Từ đó suy ra mô-men nghiêng:
Ttilt = (a + c) × Frad
c là giá trị đặc trưng cho từng bước đường kính:
| RDDS1 | c [m] |
|---|---|
| 130xH | 0.028 |
| 160xH | 0.032 |
| 180xH | 0.026 |
| 230xH | 0.029 |
Lưu ý: Trong bất kỳ trường hợp nào, các giá trị giới hạn quy định (Fax, Frad, Ttilt) đều không được vượt quá. Vui lòng liên hệ chúng tôi nếu bạn có yêu cầu tải trọng cao hơn.
Lựa chọn truyền động thẳng (Selection of Direct Drives for Rotary Applications)
Ứng dụng chu kỳ (Cycled Applications)
Trong vận hành chu kỳ, các chuyển động định vị tuần tự được xen kẽ với các khoảng dừng không có chuyển động. Chuỗi định vị đơn giản gồm chuyển động gia tốc dương tiếp theo là giảm tốc (gia tốc âm thường cùng độ lớn, trong trường hợp đó thời gian gia tốc và giảm tốc bằng nhau). Tốc độ góc tối đa ωmax đạt được ở cuối giai đoạn gia tốc.
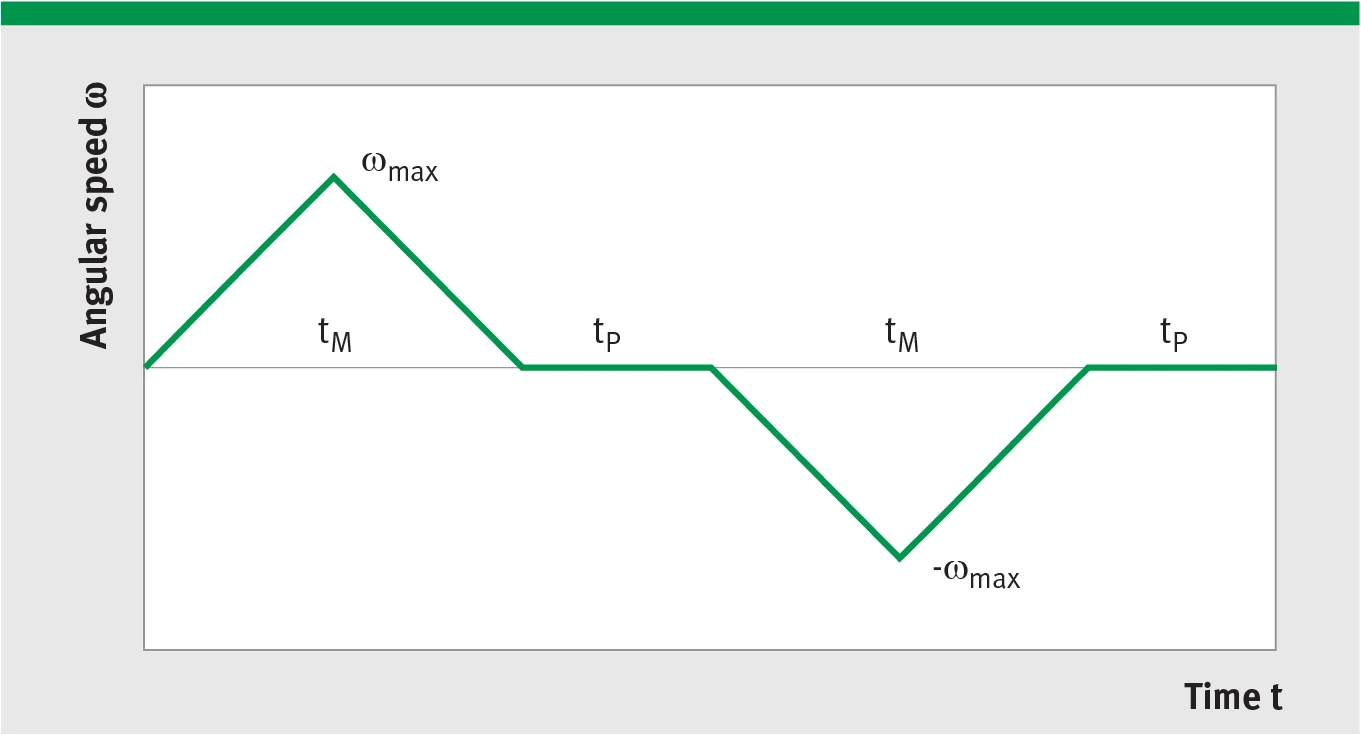
Tốc độ góc ω theo thời gian t: hiển thị ωmax, −ωmax, thời gian chuyển động tM và thời gian dừng tP cho chuyển động qua lại có chu kỳ
Từ đó có đồ thị α(t) (α: gia tốc góc) và dòng mô-men xoắn cần thiết cho chuyển động:
T = J × α
(T: mô-men xoắn [Nm], J: mô-men quán tính khối lượng [kgm2], α: gia tốc góc [rad/s2])
Một chu kỳ được mô tả trong đồ thị ω(t) (ω: tốc độ góc, t: thời gian), hiển thị chuyển động qua lại có dừng (tM: thời gian chuyển động, tP: thời gian dừng).
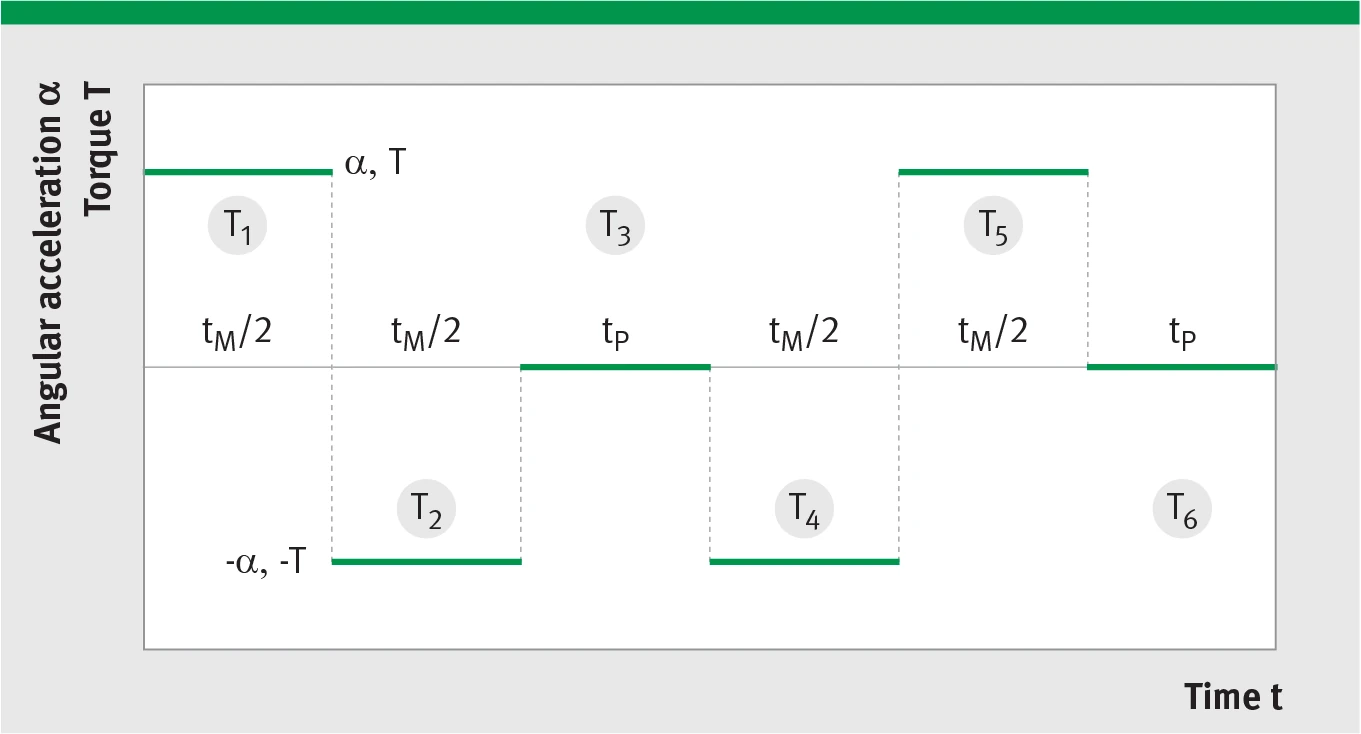
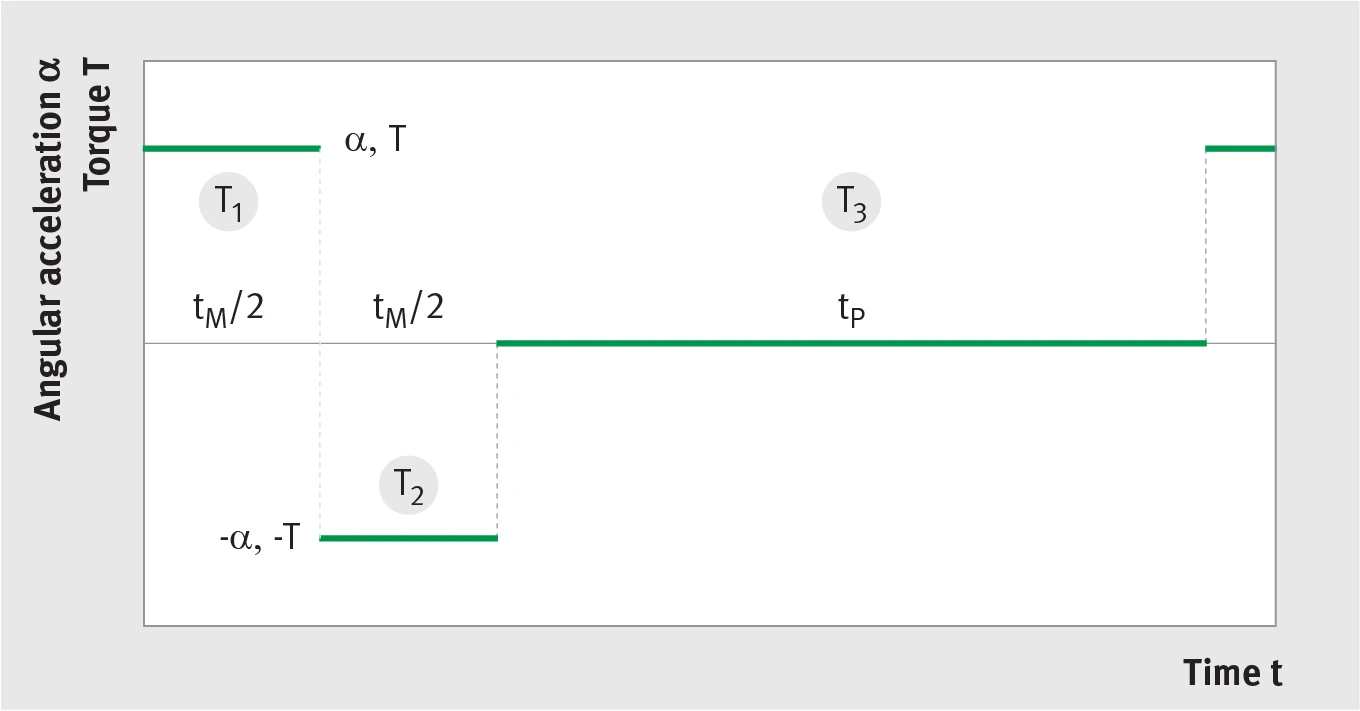
Gia tốc góc α và mô-men xoắn T theo thời gian t: sáu chu kỳ mô-men xoắn T1–T6, hiển thị các đoạn thời gian tM/2 và tP
Theo dòng mô-men xoắn của chu kỳ nhịp mong muốn, động cơ được lựa chọn theo ba tiêu chí:
- Mô-men xoắn tối đa trong chu kỳ M: Tp (mô-men xoắn đỉnh) theo bảng dữ liệu
- Mô-men xoắn hiệu dụng trong chu kỳ M: Tc (không làm mát) hoặc Tcw (làm mát bằng nước) theo bảng dữ liệu
- Tốc độ quay tối đa trong chu kỳ M: nlp theo bảng dữ liệu
Mô-men xoắn hiệu dụng bằng giá trị căn bình phương trung bình của đường cong mô-men xoắn (sáu chu kỳ mô-men xoắn) trong chu kỳ nhịp:
Trms = √T12·t1 + T22·t2 + … + T62·t6t1 + t2 + … + t6
Hệ số an toàn 1,4 trong ví dụ tính toán cũng tính đến việc động cơ hoạt động trong vùng phi tuyến của đặc tính mô-men xoắn–dòng điện, trong đó công thức tính Teff chỉ là gần đúng.
Với các mô-men xoắn T1 = T; T2 = −T; T3 = 0; T4 = −T; T5 = T; T6 = 0 và các thời gian t1 = tM/2; t2 = tM/2; t3 = tP; t4 = tM/2; t5 = tM/2; t6 = tP, mô-men xoắn hiệu dụng được tính:
Trms = Tnom × √tMtM + tP
Phương trình này được áp dụng cho mô-men xoắn hiệu dụng khi các mô-men xoắn cùng độ lớn tác dụng trong chu kỳ nhịp (mô-men quán tính khối lượng và gia tốc góc là hằng số). Dưới dấu căn xuất hiện: "tổng thời gian chuyển động chia cho tổng thời gian chuyển động và dừng". Mẫu số là thời gian chu kỳ.
Gia tốc góc, tốc độ góc tối đa và tốc độ quay tối đa của chuyển động định vị được tính bằng:
α = 4 × φ / tM2
ωmax = α × tM / 2
nmax = 60 / (2 × π) × ωmax
| Ký hiệu | Mô tả | Đơn vị |
|---|---|---|
| φ | Góc chuyển động (Motion angle) | rad |
| tM | Thời gian chuyển động (Motion time) | s |
| α | Gia tốc góc (Angular acceleration) | rad/s2 |
| ωmax | Tốc độ góc tối đa (Maximum angular speed) | rad/s |
| nmax | Tốc độ quay tối đa (Maximum rotary speed) | rpm |
Nếu giới hạn gia tốc giật (jerk limit) được lập trình trong bộ biến tần servo, thời gian định vị sẽ kéo dài tương ứng. Trong trường hợp này, thời gian định vị không đổi đòi hỏi gia tốc lớn hơn.
Ví dụ lựa chọn hệ thống truyền động thẳng quay (Selection of Rotary Direct Drive Systems)
Ví dụ: ứng dụng chu kỳ, ví dụ cho hệ thống kiểm tra
| Giá trị đặt trước (Preset values) | Giá trị | Mô tả |
|---|---|---|
| Mô-men quán tính khối lượng J [kgm2] | 0.018 | |
| Góc chuyển động φ [°] | 22.5 | |
| Mô-men ma sát Tf [Nm] | 2 | |
| Không gian lắp đặt D (đường kính ngoài tối đa) [mm] | 180 | |
| Thời gian chuyển động tM [ms] | 30 | |
| Hệ số an toàn (Safety factor) | 1.4 | |
| Thời gian dừng tP [ms] | 60 |
Chuyển đổi góc chuyển động sang radian:
φ = 180/π × 22,5° = 0,3927 rad
Các bước tính toán:
α = 4 × 0.3927 rad / (0.03 s)2 = 1745.33 rad/s2
ωmax = 1745.33 rad/s2 × 0.03 s / 2 = 26.18 rad/s
nmax = 60 / (2 × π) × 26.18 rad/s = 250 rpm
Cùng với mô-men ma sát và hệ số an toàn, ta được mô-men xoắn hệ số an toàn tối đa:
Tnom = [(0.018 kgm2 × 1745.33 rad/s2) + 2 Nm] × 1.4 = 46.78 Nm
Trong trường hợp này, các mô-men xoắn gia tốc và hãm bằng nhau. Mô-men xoắn hiệu dụng bằng giá trị căn bình phương trung bình của đường cong mô-men xoắn trong chu kỳ nhịp:
Trms = 46.78 Nm × √0.03 s0.03 s + 0.06 s = 27.01 Nm
(6 chu kỳ mô-men xoắn = 2 chu kỳ)
Kết quả lựa chọn hệ thống
Cả hai hệ thống được chọn đều đạt tốc độ quay tối đa 250 rpm.
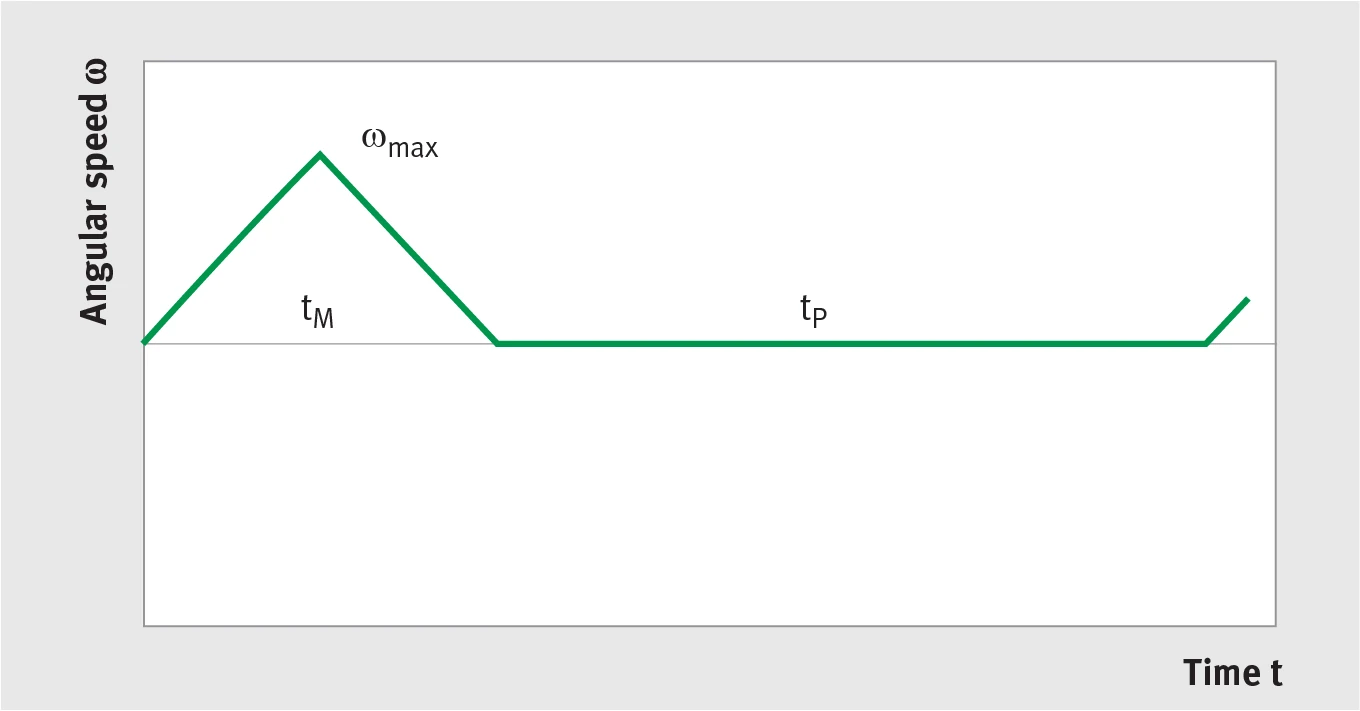
Ví dụ lựa chọn: tốc độ góc ω theo thời gian t (ωmax, tM, tP)
Ví dụ lựa chọn: gia tốc góc α và mô-men xoắn T theo thời gian t (chu kỳ đơn giản hóa T1–T3)
Tư vấn và lựa chọn
Để được tư vấn và lựa chọn cho ứng dụng của bạn, vui lòng liên hệ chúng tôi bất cứ lúc nào.