ข้อดีของระบบขับเคลื่อนตรงแบบหมุน (Advantages of Rotary Direct Drives)
เพิ่มสมรรถนะเชิงพลวัต
- ไม่มีการแปลงรูปแบบการเคลื่อนที่
- ระบบขับเคลื่อนปราศจากความยืดหยุ่น ระยะคลอน ฮิสเทอรีซิส และแรงเสียดทานที่เกิดจากชิ้นส่วนส่งกำลังหรือคัปปลิ้ง
- มอเตอร์แบบหลายขั้ว
- มอเตอร์ IDAM ใช้การออกแบบแบบหลายขั้ว สามารถผลิตแรงบิดสูงมาก และใช้งานแรงบิดสูงนี้ได้ตั้งแต่ความเร็วรอบ > 0 จนถึงความเร็วรอบต่อเนื่อง
- โรเตอร์วงแหวนบาง
- ด้วยการออกแบบวงแหวนบางรูปทรงแหวนที่มีเส้นผ่านศูนย์กลางภายในเปิดขนาดใหญ่ มอเตอร์จึงมีโมเมนต์ความเฉื่อยของโรเตอร์ต่ำมาก ทำให้มีความสามารถในการเร่งความเร็วสูง
- การวัดตำแหน่งโดยตรง
- ด้วยการวัดตำแหน่งโดยตรงและโครงสร้างเชิงกลที่แข็งแกร่ง การวางตำแหน่งจึงมีทั้งพลวัตสูงและความแม่นยำสูง
ลดต้นทุนการดำเนินงาน
- ไม่มีชิ้นส่วนเคลื่อนที่เพิ่มเติม
- งานประกอบ การปรับตั้ง และการบำรุงรักษาชุดขับเคลื่อนลดลงอย่างมาก
- ระบบขับเคลื่อนไม่มีการสึกหรอ
- แม้ภายใต้โหลดสูงและโหลดแปรผันบ่อยครั้ง ระบบขับเคลื่อนยังคงทนทานมาก ส่งผลให้เวลาหยุดทำงานของเครื่องจักรลดลง
- ความพร้อมใช้งานสูง
- นอกจากอายุการใช้งานที่ยาวนานขึ้นและการสึกหรอที่ลดลง ความทนทานของ torque motor ยังเพิ่มความพร้อมใช้งานของระบบอีกด้วย
เพิ่มความยืดหยุ่นในการออกแบบ
- เพลากลวง
- การออกแบบ hollow shaft ของ torque motor ที่มีเส้นผ่านศูนย์กลางภายในเปิดขนาดใหญ่ให้ความยืดหยุ่นในการออกแบบสูงมาก สามารถร้อยท่อ อุปกรณ์จับยึด ข้อต่อหมุน และสายไฟผ่านใจกลางมอเตอร์ได้
- การผสานองค์ประกอบ RDDS
- ด้วยพื้นที่ติดตั้งที่น้อยกว่า ระบบจึงสามารถบูรณาการเข้ากับการออกแบบเครื่องจักรได้ง่าย
- การออกแบบแบบกระชับ
- ร่วมกับเส้นผ่านศูนย์กลางภายในเปิดขนาดใหญ่ (hollow shaft) ระบบมีขนาดกระชับมากเมื่อเทียบกับแรงบิดที่ผลิตได้
- จำนวนชิ้นส่วนน้อย
- การออกแบบที่ผ่านการพัฒนามาแล้วช่วยให้บูรณาการระบบเข้ากับแนวคิดเครื่องจักรโดยรวมได้ง่าย ชิ้นส่วนที่น้อยและแข็งแกร่งกว่าทำให้อัตราการเสีย (MTBF* สูง) ต่ำ
*MTBF: Mean Time Between Failures (ค่าเฉลี่ยเวลาระหว่างความขัดข้อง)
ข้อดีของระบบ (System Advantages)
- พลวัตสูงและความแกร่ง (High dynamics and stiffness)
- การเคลื่อนที่ที่ราบเรียบอย่างยิ่ง (Extremely smooth motion)
- ความเร่งสูง (High acceleration)
- ความเร็วสูง (High velocity)
- การออกแบบแบบกระชับ (Compact design)
- ประกอบง่าย (Easy assembly)
- ความแกร่งในการรับโหลดแบบสถิตและพลวัตที่ยอดเยี่ยม (Excellent static and dynamic load rigidity)
- ไม่มีระยะคลอน (No backlash)
- ระบบสึกหรอน้อยและบำรุงรักษาต่ำ (Low-wear and low-maintenance system)
- ความเฉื่อยต่ำ (Small inertia)
- แรงบิดสูงสุด Tp: 8.9 – 369 Nm
- ระบบวัด (Measuring system): หลักการวัดแบบออปติคัล มีจำนวนอินครีเมนต์หลายแบบตามรุ่น
- ตลับลูกปืน (Bearing): กระชับ รับแรงบิดเอียง (tilting torque) ภายนอกสูง ความแกร่งและความแม่นยำสูง ค่าเบี่ยงเบนในแนวแกนและแนวรัศมีต่ำมาก (runout)
- เส้นผ่านศูนย์กลางภายในอิสระ (Free inner diameter)
โครงสร้างมาตรฐาน (Standard Design)
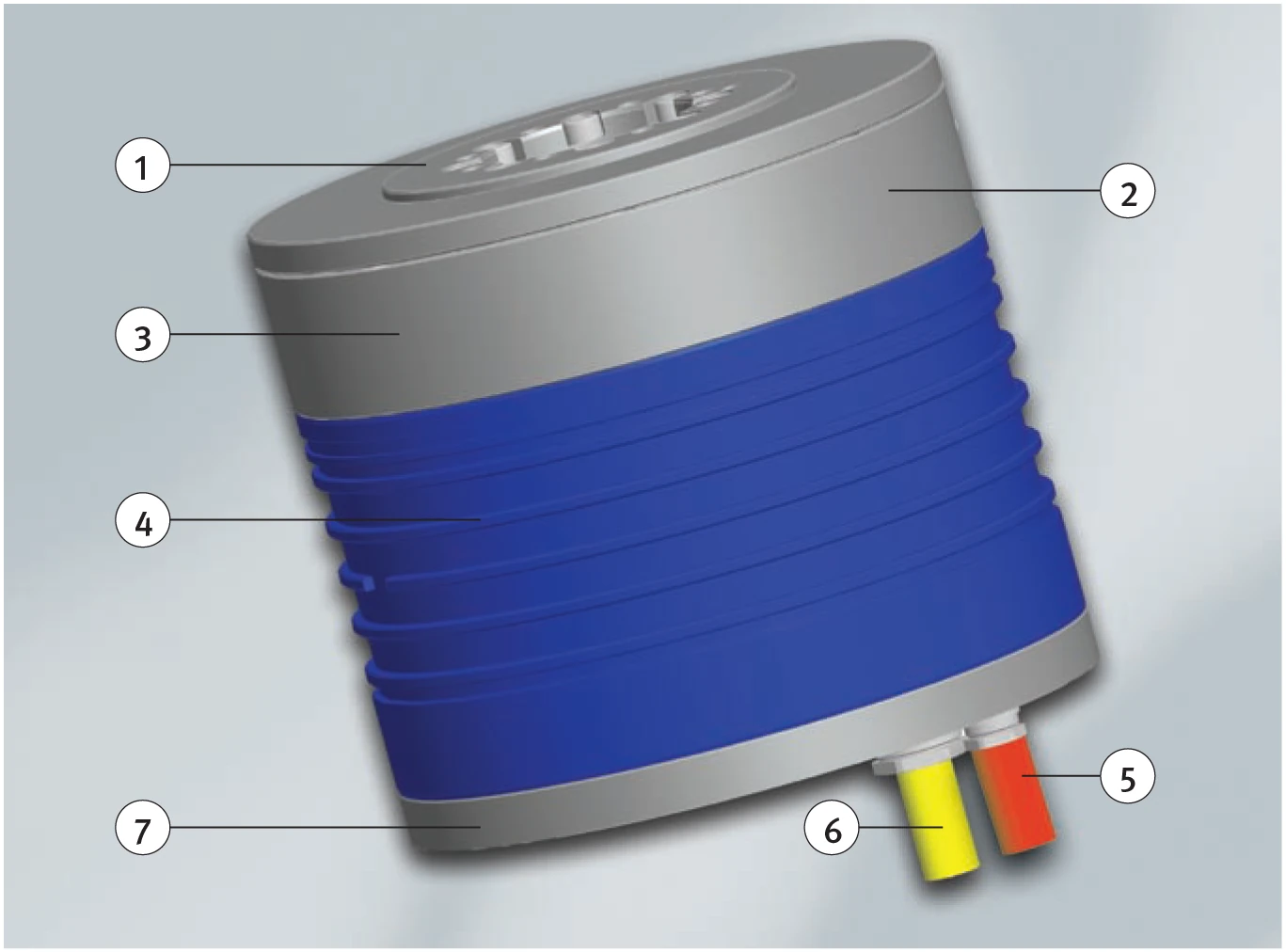
โครงสร้างมาตรฐาน RDDS: ตำแหน่งองค์ประกอบ 1 (แผ่นสเตจ) ถึง 7 (แผ่นฐาน)
โครงสร้างมาตรฐาน RDDS ประกอบด้วยองค์ประกอบหลักเจ็ดชิ้น ดังนี้:
การป้องกันความร้อนของมอเตอร์ (Thermal Motor Protection)
วงจรตรวจสอบ I และ II (Monitoring Circuit I and II)
ระบบขับเคลื่อนตรงมักทำงานที่ขีดจำกัดสมรรถนะเชิงความร้อน นอกจากนี้ อาจเกิดโหลดเกินที่ไม่คาดคิดระหว่างการทำงาน ซึ่งส่งผลให้กระแสเกินค่าพิกัดที่อนุญาต ดังนั้น ตัวควบคุมเซอร์โวสำหรับมอเตอร์ควรมีการป้องกันโหลดเกินเพื่อควบคุมกระแสมอเตอร์ ค่าประสิทธิผล (root mean square) ของกระแสมอเตอร์อนุญาตให้เกินค่าพิกัดที่อนุญาตได้เพียงช่วงสั้น การตรวจสอบอุณหภูมิทางอ้อมแบบนี้รวดเร็วและเชื่อถือได้
มอเตอร์ IDAM ติดตั้งเซ็นเซอร์อุณหภูมิ (PTC และ KTY) ซึ่งควรใช้สำหรับการป้องกันความร้อนของมอเตอร์
วงจรตรวจสอบ I (Monitoring Circuit I)
ขดลวดสามเฟสติดตั้ง PTC สามตัวต่ออนุกรมเพื่อให้การป้องกันมอเตอร์ PTC คือ Positive Temperature Coefficient thermistor (ตัวต้านทานเทอร์มิสเตอร์สัมประสิทธิ์อุณหภูมิบวก) เมื่อติดตั้งแล้วมีค่าคงเวลาเชิงความร้อนต่ำกว่า 5 วินาที
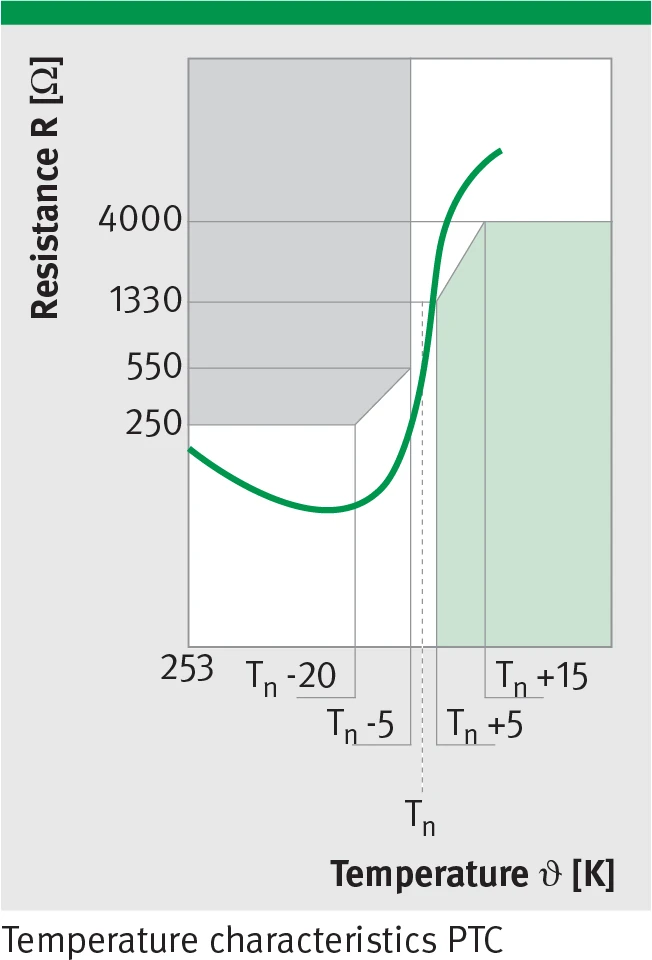
คุณลักษณะอุณหภูมิ PTC: ความต้านทาน R [Ω] เทียบกับอุณหภูมิ ϑ [K]; ความต้านทานเพิ่มสูงอย่างรวดเร็วเมื่อเกินอุณหภูมิตอบสนองพิกัด Tn
คุณลักษณะอุณหภูมิ PTC (Temperature Characteristics PTC)
ความต้านทาน R [Ω] เทียบกับอุณหภูมิ ϑ [K] (ข้อมูลจากแหล่งอ้างอิง):
| อุณหภูมิ | Tn-20 | Tn-5 | Tn | Tn+5 | Tn+15 |
|---|---|---|---|---|---|
| ความต้านทาน R [Ω] | 250 | 550 | 1330 | 4000 | — |
Tn: อุณหภูมิตอบสนองพิกัด (Nominal response temperature)
ต่างจาก KTY ตรงที่ความต้านทานของ PTC เพิ่มขึ้นอย่างรวดเร็วมากเมื่อเกินอุณหภูมิตอบสนองพิกัด Tn โดยสูงขึ้นหลายเท่าของค่าขณะเย็น การต่อ PTC สามตัวแบบอนุกรมทำให้เกิดการเปลี่ยนแปลงความต้านทานรวมอย่างชัดเจน แม้ว่าองค์ประกอบเพียงตัวเดียวเกิน Tn การใช้เซ็นเซอร์สามตัวช่วยให้มั่นใจว่า แม้มอเตอร์หยุดนิ่งภายใต้โหลดเฟสไม่สมมาตร ยังคงมีสัญญาณสำหรับการหยุดอย่างปลอดภัย
อุปกรณ์ป้องกันมอเตอร์เชิงพาณิชย์ที่ต่ออยู่ด้านล่างมักทำงานระหว่าง 1.5 ถึง 3.5 kΩ ด้วยวิธีนี้จึงตรวจพบอุณหภูมิสูงเกินได้ภายในความคลาดเคลื่อนเพียงไม่กี่องศาสำหรับแต่ละขดลวด อุปกรณ์ตัดยังตอบสนองเมื่อความต้านทานในวงจร PTC ต่ำเกินไป ซึ่งมักบ่งชี้ความบกพร่องในวงจรตรวจสอบ และยังรับประกันการแยกไฟฟ้าอย่างปลอดภัยระหว่างตัวควบคุมกับเซ็นเซอร์ในมอเตอร์ อุปกรณ์ป้องกันมอเตอร์ไม่รวมอยู่ในขอบเขตการจัดส่ง
หมายเหตุ: PTC ไม่เหมาะสำหรับการวัดอุณหภูมิ ควรใช้ KTY หากต้องการวัดอุณหภูมิ สามารถผสานเซ็นเซอร์ตรวจสอบเพิ่มเติมได้ตามความต้องการของลูกค้า โดยหลักการแล้ว สัญญาณเซ็นเซอร์ PTC ต้องได้รับการตรวจสอบเพื่อป้องกันอุณหภูมิสูงเกิน
วงจรตรวจสอบ II (Monitoring Circuit II)
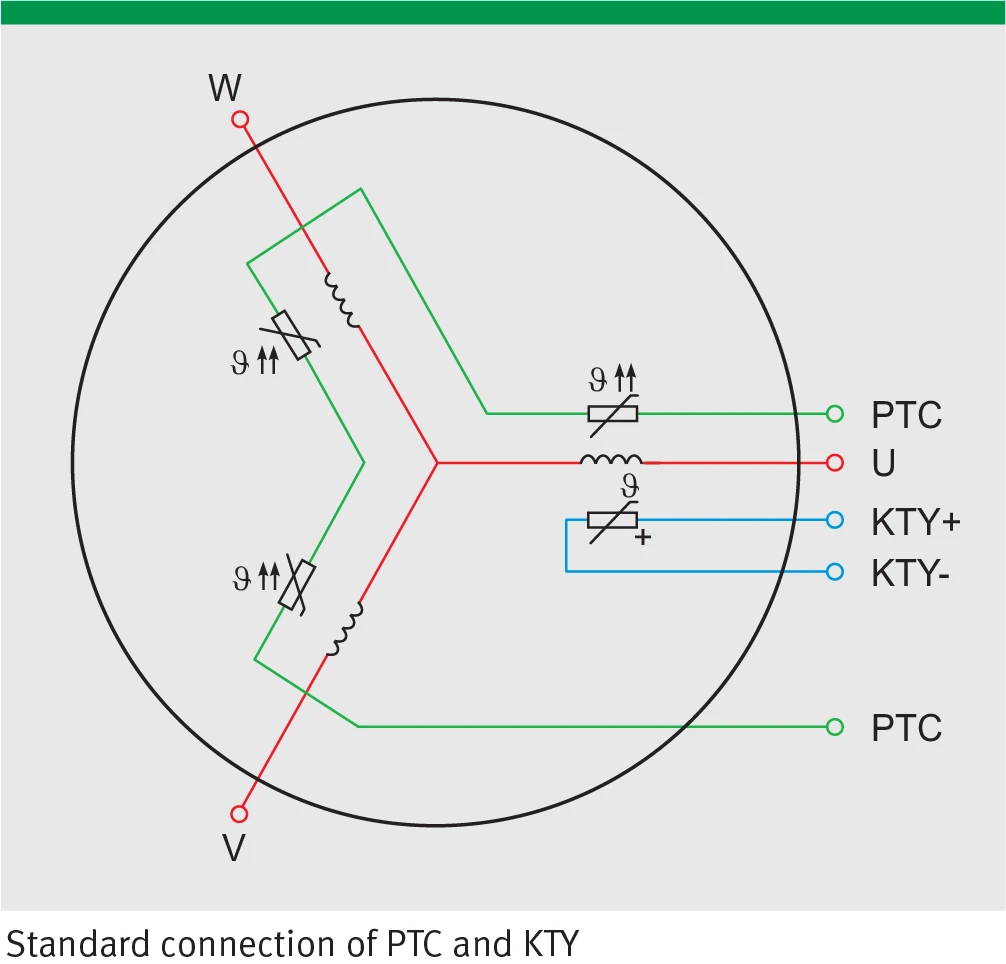
การต่อสายมาตรฐาน PTC และ KTY: ขดลวดสามเฟส (U, V, W) แต่ละเฟสติด PTC; เฟส U ติด KTY84-130
เฟสหนึ่งของมอเตอร์ติดตั้ง KTY84-130 เพิ่มเติม เซ็นเซอร์นี้เป็นตัวต้านทานเซมิคอนดักเตอร์ที่มีสัมประสิทธิ์อุณหภูมิบวก (semiconductor resistor with positive temperature coefficient)
สัญญาณเทียบเท่าอุณหภูมิถูกสร้างขึ้นด้วยความล่าช้าซึ่งขึ้นอยู่กับประเภทมอเตอร์ เพื่อป้องกันมอเตอร์จากอุณหภูมิสูงเกิน จึงกำหนดค่าจำกัดการตัดไว้ในตัวควบคุม เมื่อมอเตอร์หยุดนิ่ง กระแสคงที่จะไหลผ่านขดลวด โดยค่ากระแสขึ้นอยู่กับตำแหน่งขั้วที่เกี่ยวข้อง
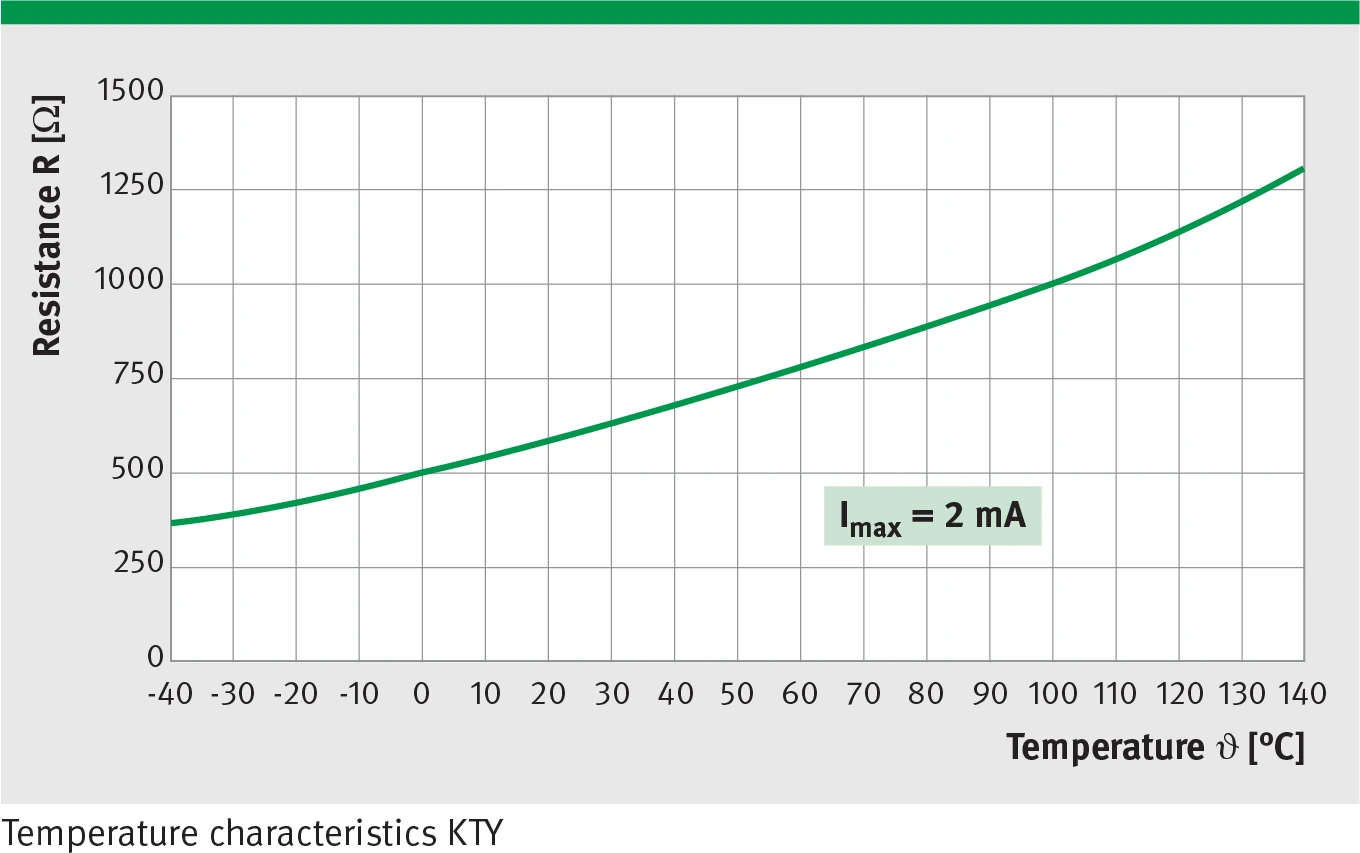
คุณลักษณะอุณหภูมิ KTY: ความต้านทาน R [Ω] เทียบกับอุณหภูมิ ϑ [°C] (−40 ถึง 140 °C), กระแสวัด Imax = 2 mA
ด้วยเหตุนี้ มอเตอร์จึงไม่ร้อนสม่ำเสมอ ซึ่งอาจทำให้ขดลวดที่ไม่ได้รับการตรวจสอบร้อนเกิน เซ็นเซอร์ PTC และ KTY มีฉนวนพื้นฐานต่อมอเตอร์ ไม่เหมาะสำหรับการต่อตรงเข้าวงจร PELV/SELV ตามมาตรฐาน DIN EN 50178
หมายเหตุ: เซ็นเซอร์ KTY ตรวจสอบขดลวดเพียงเส้นเดียว สัญญาณสามารถใช้สำหรับการตรวจสอบอุณหภูมิหรือการแจ้งเตือนได้ แต่ไม่อนุญาตให้ใช้เพื่อการตัดเพียงอย่างเดียว
การเชื่อมต่อทางไฟฟ้า (Electrical Connections)
การเชื่อมต่อสายมาตรฐานของแมทริกซ์ RDDS1 เป็นแบบออกตามแกน ตำแหน่งกำหนดไว้ในแบบ ความยาวสายจากเอาต์พุตมอเตอร์คือ 1.0 m ปลายสายเปิดและติดปลอกสาย สายที่ใช้ได้รับการรับรอง UL และเหมาะสำหรับรางเดินสาย (cable drag chains)
ระบบหมุนมีตัวเลือกเป็นปลั๊กติดตั้งภายนอกบนเปลือกโดยตรง หรือปลั๊กคัปเปลอร์ที่ปลายสายเชื่อมต่อ
ทิศทางการหมุนบวกของระบบ
ทิศทางการหมุนมาตรฐานของแผ่นสเตจ (stage plate) คือทวนเข็มนาฬิกา แต่อาจแตกต่างกันขึ้นอยู่กับประเภทการเชื่อมต่อ
การจัดเรียงขา — การเชื่อมต่อด้วยสาย (มาตรฐาน)
ประเภทสาย: 4G1.5 + 2x (2x0.75) KAWEFLEX 5281, Ø 12.6 mm, รัศมีโค้งพลวัต 95 mm, รัศมีโค้งสถิต 63 mm
| มอเตอร์ (Motor) | |
|---|---|
| แกนสาย (Core) | สัญญาณ (Signal) |
| 1 | เฟส U (Phase U) |
| 2 | เฟส V (Phase V) |
| 3 | เฟส W (Phase W) |
| GNYE | PE |
| 5 | PTC (3x อนุกรม, ทุกเฟส) |
| 6 | PTC (3x อนุกรม, ทุกเฟส) |
| 7 | + เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| 8 | - เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| Shield | |
ประเภทสาย: 12x0.08 NJ AWM STYLE 20963, Ø 3.7 mm, รัศมีโค้งพลวัต 40 mm, รัศมีโค้งสถิต 8 mm
| ระบบวัด 1 Vpp (Measuring system 1 Vpp) | |
|---|---|
| แกนสาย (Core) | สัญญาณ (Signal) |
| GN | U1+ |
| BN | U1- |
| BK | U2+ |
| RD | U2- |
| GY | U0+ |
| PK | U0- |
| WH | GND |
| BU | +5 V |
| Shield | |
การจัดเรียงขา — การเชื่อมต่อด้วยปลั๊ก (ตัวเลือก)
RDDS1-130xH: ปลั๊กติดตั้ง M17 แบบ 9 ขั้ว
| มอเตอร์ (Motor) — ปลั๊กติดตั้ง M17 แบบ 9 ขั้ว | |
|---|---|
| ขา (Pin) | สัญญาณ (Signal) |
| 1 | เฟส U (Phase U) |
| 2 | เฟส V (Phase V) |
| 3 | เฟส W (Phase W) |
| PE | PE |
| A | PTC (3x อนุกรม, ทุกเฟส) |
| B | PTC (3x อนุกรม, ทุกเฟส) |
| C | NC |
| D | + เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| E | - เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| Case | Shield |
| ระบบวัด 1 Vpp — ปลั๊กติดตั้ง M17 แบบ 17 ขั้ว | |
|---|---|
| ขา (Pin) | สัญญาณ (Signal) |
| 1 | +5 V Sense |
| 2 | NC |
| 3 | NC |
| 4 | GND Sense |
| 5 | NC |
| 6 | NC |
| 7 | +5 V |
| 8 | NC |
| 9 | NC |
| 10 | GND |
| 11 | NC |
| 12 | U2+ |
| 13 | U2- |
| 14 | U0+ |
| 15 | U1+ |
| 16 | U1- |
| 17 | U0- |
| Case | Shield |
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH และรูปแบบเชื่อมต่อ MA/MU/MD (ทุกขนาด)
RDDS1-160xH, RDDS1-180xH, RDDS1-230xH ใช้ ปลั๊กติดตั้ง M23 แบบ 8 ขั้ว; รูปแบบเชื่อมต่อ MA/MU/MD (ทุกขนาด) ใช้ ปลั๊กคัปเปลอร์ M23 แบบ 8 ขั้วที่ปลายสาย
| มอเตอร์ (Motor) — ปลั๊กติดตั้ง M23 แบบ 8 ขั้ว | |
|---|---|
| ขา (Pin) | สัญญาณ (Signal) |
| 1 | เฟส U (Phase U) |
| 4 | เฟส V (Phase V) |
| 3 | เฟส W (Phase W) |
| 2 / PE | PE |
| A | PTC (3x อนุกรม, ทุกเฟส) |
| B | PTC (3x อนุกรม, ทุกเฟส) |
| C | + เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| D | - เซ็นเซอร์อุณหภูมิ KTY84-130 (หนึ่งเฟส) |
| Case | Shield |
| ระบบวัด 1 Vpp — ปลั๊กติดตั้ง / คัปเปลอร์ M23 แบบ 12 ขั้ว | |
|---|---|
| ขา (Pin) | สัญญาณ (Signal) |
| 1 | U2- |
| 2 | +5 V Sense |
| 3 | U0+ |
| 4 | U0- |
| 5 | U1+ |
| 6 | U1- |
| 7 | NC |
| 8 | U2+ |
| 9 | NC |
| 10 | GND |
| 11 | GND Sense |
| 12 | +5 V |
| Case | Shield |
การสับเปลี่ยนขั้ว (Commutation)
ระบบขับเคลื่อนตรงแบบหมุนทำงานในโหมด commutated เป็นอันดับแรก มอเตอร์แรงบิด IDAM มาตรฐานไม่ติดตั้งเซ็นเซอร์ Hall IDAM แนะนำการ commutation ที่เกี่ยวข้องกับระบบวัด เนื่องจากได้รับการสนับสนุนจากเซอร์โวอินเวอร์เตอร์และตัวควบคุมสมัยใหม่
ความแข็งแกร่งของฉนวน (Insulation Strength)
ความแข็งแกร่งของฉนวนสำหรับแรงดันบัส (link voltage) สูงสุด 600 VDC
มอเตอร์ IDAM เป็นไปตามคำสั่ง EC 73/23/EEC และมาตรฐานยุโรป EN 50178 และ EN 60204 ก่อนจัดส่งผ่านการทดสอบแรงดันสูงแบบแยกส่วน และเทเรซินภายใต้สุญญากาศ กรุณาตรวจสอบให้แน่ใจว่าปฏิบัติตามแรงดันใช้งานที่เกี่ยวข้องกับประเภทมอเตอร์
แรงดันเกินที่ขั้วมอเตอร์ในการทำงานแบบอินเวอร์เตอร์
เนื่องจากเซมิคอนดักเตอร์กำลังที่สลับเร็วมากสร้างโหลด du/dt สูง แรงดันพีคที่สูงกว่าแรงดันอินเวอร์เตอร์จริงอย่างมีนัยสำคัญอาจเกิดขึ้นที่ขั้วมอเตอร์ โดยเฉพาะเมื่อใช้สายเชื่อมต่อที่ยาวกว่า (ตั้งแต่ประมาณ 5 m) ระหว่างมอเตอร์และอินเวอร์เตอร์ ซึ่งส่งโหลดสูงมากต่อฉนวนมอเตอร์
หมายเหตุ:
- ค่า du/dt ของโมดูล PWM ต้องไม่เกิน 8 kV/µs
- สายเชื่อมต่อมอเตอร์ต้องสั้นที่สุดเท่าที่เป็นไปได้
- เพื่อป้องกันมอเตอร์ ควรใช้ออสซิลโลสโคปในการกำหนดค่าเฉพาะเพื่อวัดแรงดัน (PWM) ที่ใช้กับมอเตอร์ผ่านขดลวดและเทียบกับ PE แรงดันพีคที่มีอยู่ไม่ควรเกิน 1 kV อย่างมีนัยสำคัญ ตั้งแต่ประมาณ 2 kV ควรคาดหวังความเสียหายต่อฉนวนอย่างค่อยเป็นค่อยไป
- กรุณาปฏิบัติตามคำแนะนำและหมายเหตุการกำหนดค่าที่ผู้ผลิตตัวควบคุมให้มา
วิศวกร IDAM จะช่วยเหลือในการใช้งานของคุณและช่วยระบุและลดแรงดันที่สูงเกิน
การระบายความร้อนและวงจรระบายความร้อน (Cooling and Cooling Circuit)
การสูญเสียกำลังและการสูญเสียความร้อน
นอกจากการสูญเสียกำลังที่กำหนดโดยค่าคงที่มอเตอร์ km แล้ว มอเตอร์ยังเกิดการสูญเสียที่ขึ้นกับความถี่ โดยเฉพาะที่ความถี่ควบคุมสูง (เกิน 50 Hz) การสูญเสียเหล่านี้รวมกันทำให้มอเตอร์และส่วนประกอบอื่นของระบบร้อนขึ้น
กฎต่อไปนี้ใช้ที่ความถี่ควบคุมต่ำ (< 80 Hz) ของมอเตอร์: มอเตอร์ที่มีค่าคงที่มอเตอร์ km สูงจะผลิตการสูญเสียกำลังต่ำกว่าเมื่อเทียบกับมอเตอร์สเปกเดียวกันที่มีค่าคงที่มอเตอร์ต่ำกว่า
การสูญเสียกำลังที่เกิดขึ้นระหว่างการทำงานของมอเตอร์ถ่ายเทผ่านส่วนประกอบมอเตอร์ไปยังองค์ประกอบที่ต่ออยู่ ระบบโดยรวมได้รับการออกแบบอย่างระมัดระวังเพื่อควบคุมการกระจายความร้อนผ่านการพา การนำ และการแผ่รังสี
แรงบิดต่อเนื่องของมอเตอร์ระบายความร้อนด้วยของเหลวสูงกว่ามอเตอร์ที่ไม่มีการระบายความร้อนประมาณสองเท่า ระบบขับเคลื่อนตรงแบบหมุนต้องได้รับการเลือกและบูรณาการเข้ากับแนวคิดเครื่องจักรตามข้อกำหนดพื้นที่ติดตั้ง ความแม่นยำ และการระบายความร้อน
ควรใช้การระบายความร้อนแบบแอคทีฟเป็นอันดับแรกในเครื่องจักรสมรรถนะสูงและอุปกรณ์ที่มีการทำงานเชิงพลวัตสูงพร้อมโหลดตลับลูกปืนสูงที่สอดคล้องกัน
การออกแบบระบบระบายความร้อน
การระบายความร้อนของระบบออกแบบเป็นแบบแจ็คเก็ตระบายความร้อน (jacket cooling) และควรต่อโดยลูกค้าเข้ากับวงจรระบายความร้อนของอุปกรณ์ระบายความร้อน แจ็คเก็ตระบายความร้อนเป็นส่วนหนึ่งของมอเตอร์แบบตัวเลือก หรือเป็นส่วนหนึ่งของโครงสร้างเครื่องจักรของลูกค้าอยู่แล้ว
ตัวกลางระบายความร้อน (cooling medium) ไหลจากทางเข้าไปยังทางออกผ่านรูในครีบระบายความร้อนที่ระดับต่างกัน ข้อต่อทางเข้าและทางออกสามารถกำหนดให้กับสองช่องเชื่อมต่อตามต้องการ พื้นที่ไหลถูกปิดผนึกด้านนอกด้วย O-ring
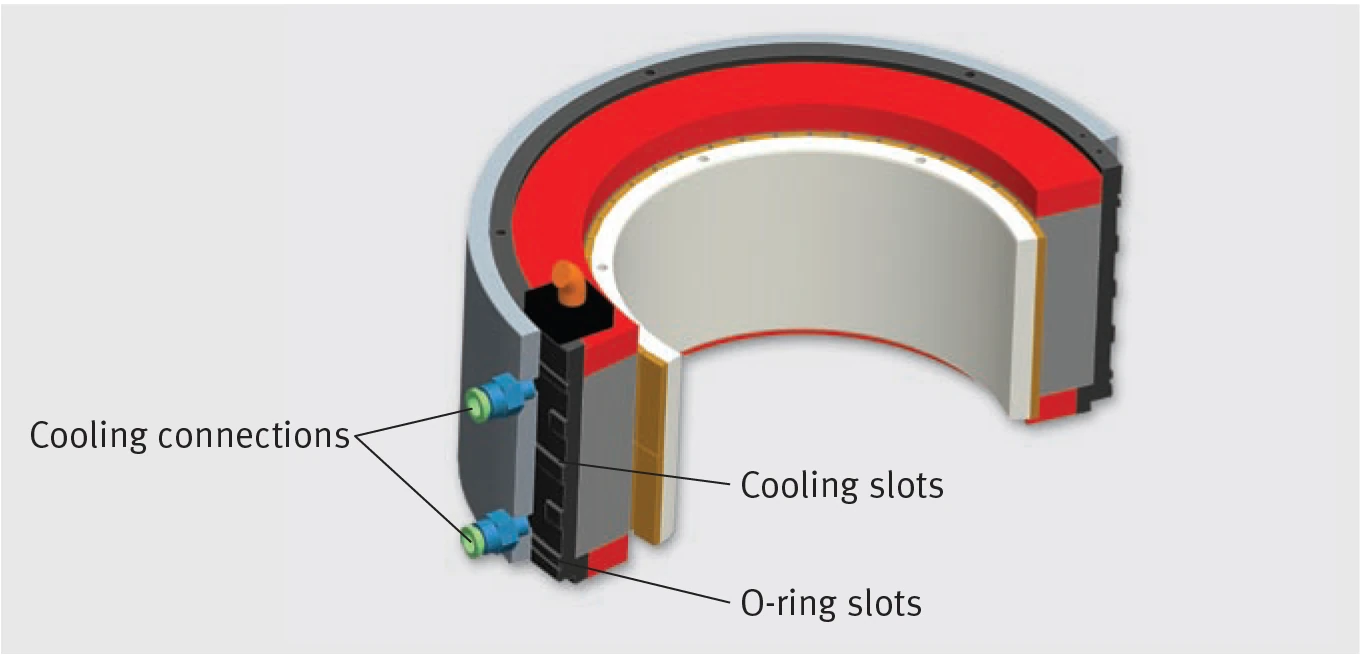
ตัดขวางแจ็คเก็ตระบายความร้อน: ตำแหน่งข้อต่อระบายความร้อน (Cooling connections) ช่องระบายความร้อน (Cooling slots) และร่อง O-ring (O-ring slots)
หมายเหตุ: เมื่อใช้น้ำเป็นสารหล่อเย็น ต้องใช้สารเติมแต่งเพื่อป้องกันการกัดกร่อนและการตกตะกอนทางชีวภาพในวงจรระบายความร้อน
การพึ่งพาข้อมูลพิกัดต่ออุณหภูมิจ่ายของตัวกลางระบายความร้อน (Dependency of Characteristic Data on the Supply Temperature of Cooling Medium)
กระแสต่อเนื่อง Icw ที่ระบุในแผ่นข้อมูลสำหรับการทำงานระบายความร้อนด้วยน้ำสามารถบรรลุได้ที่อุณหภูมิจ่ายพิกัด ϑnV = 25 °C อุณหภูมิจ่าย ϑV ที่สูงขึ้นส่งผลให้สมรรถนะการระบายความร้อนลดลงและกระแสพิกัดก็ลดลงด้วย กระแสต่อเนื่องที่ลดลง Ic red คำนวณได้จากสมการกำลังสองต่อไปนี้:
Ic red = Icw × √ϑmax − ϑVϑmax − ϑnV
| สัญลักษณ์ | คำอธิบาย | หน่วย |
|---|---|---|
| Ic red | กระแสต่อเนื่องที่ลดลง (Reduced continuous current) | A |
| Icw | กระแสต่อเนื่อง ระบายความร้อนที่ ϑnV (Continuous current, cooled at ϑnV) | A |
| ϑV | อุณหภูมิจ่ายปัจจุบัน (Current supply temperature) | °C |
| ϑnV | อุณหภูมิจ่ายพิกัด (Rated supply temperature) | °C |
| ϑmax | อุณหภูมิขดลวดสูงสุดที่อนุญาต (Maximum permissible winding temperature สำหรับกระแสมอเตอร์คงที่) | °C |
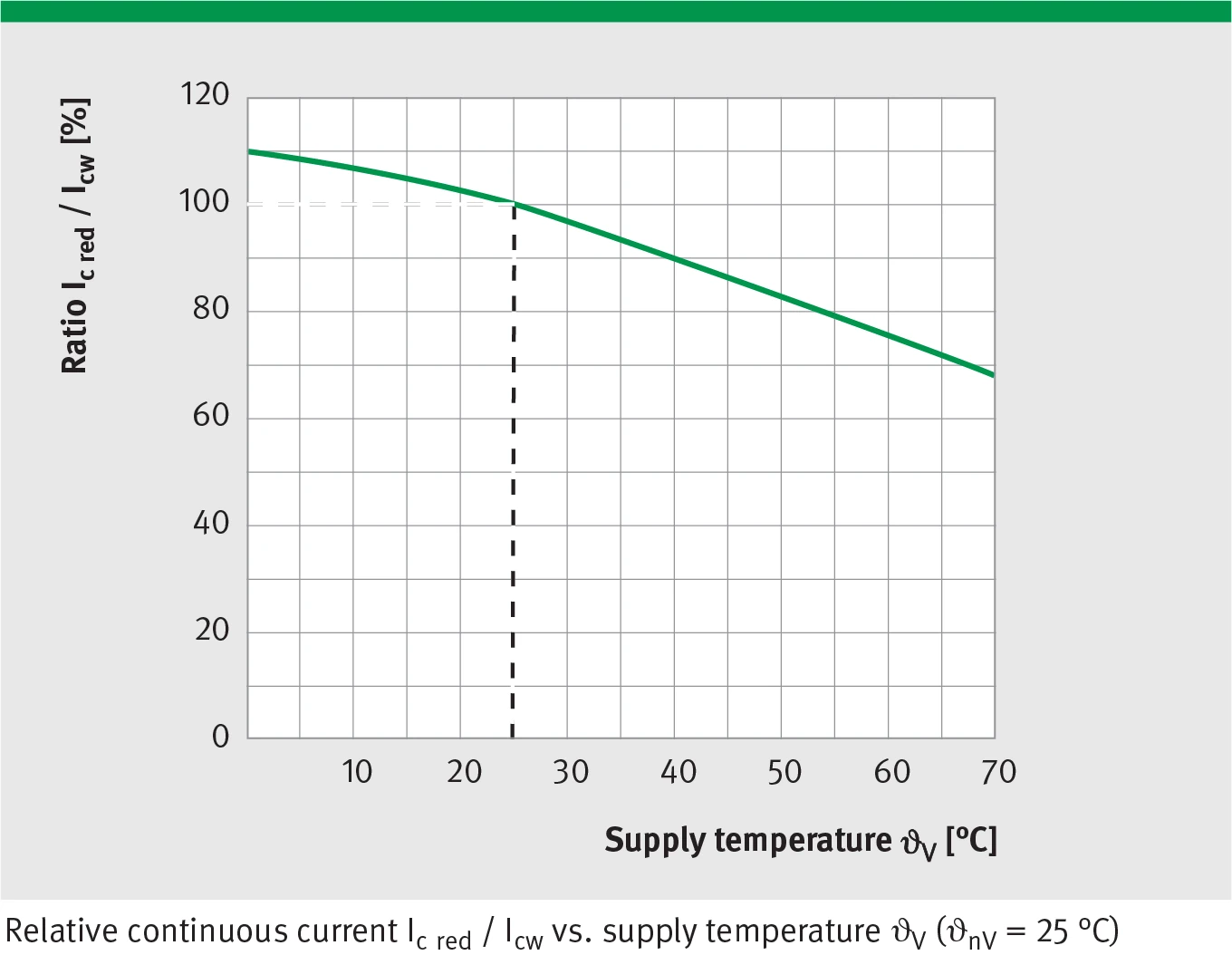
กระแสต่อเนื่องสัมพัทธ์ Ic red / Icw [%] เทียบกับอุณหภูมิจ่าย ϑV [°C] (อุณหภูมิจ่ายพิกัด ϑnV = 25 °C)
รอบการวางตำแหน่ง (Positioning Cycle)
ตัวอย่างรอบการวางตำแหน่งต่อไปนี้ใช้ระบบ RDDS1-160x195-S-B-CA-WM-9000:
พารามิเตอร์ระบบตัวอย่าง
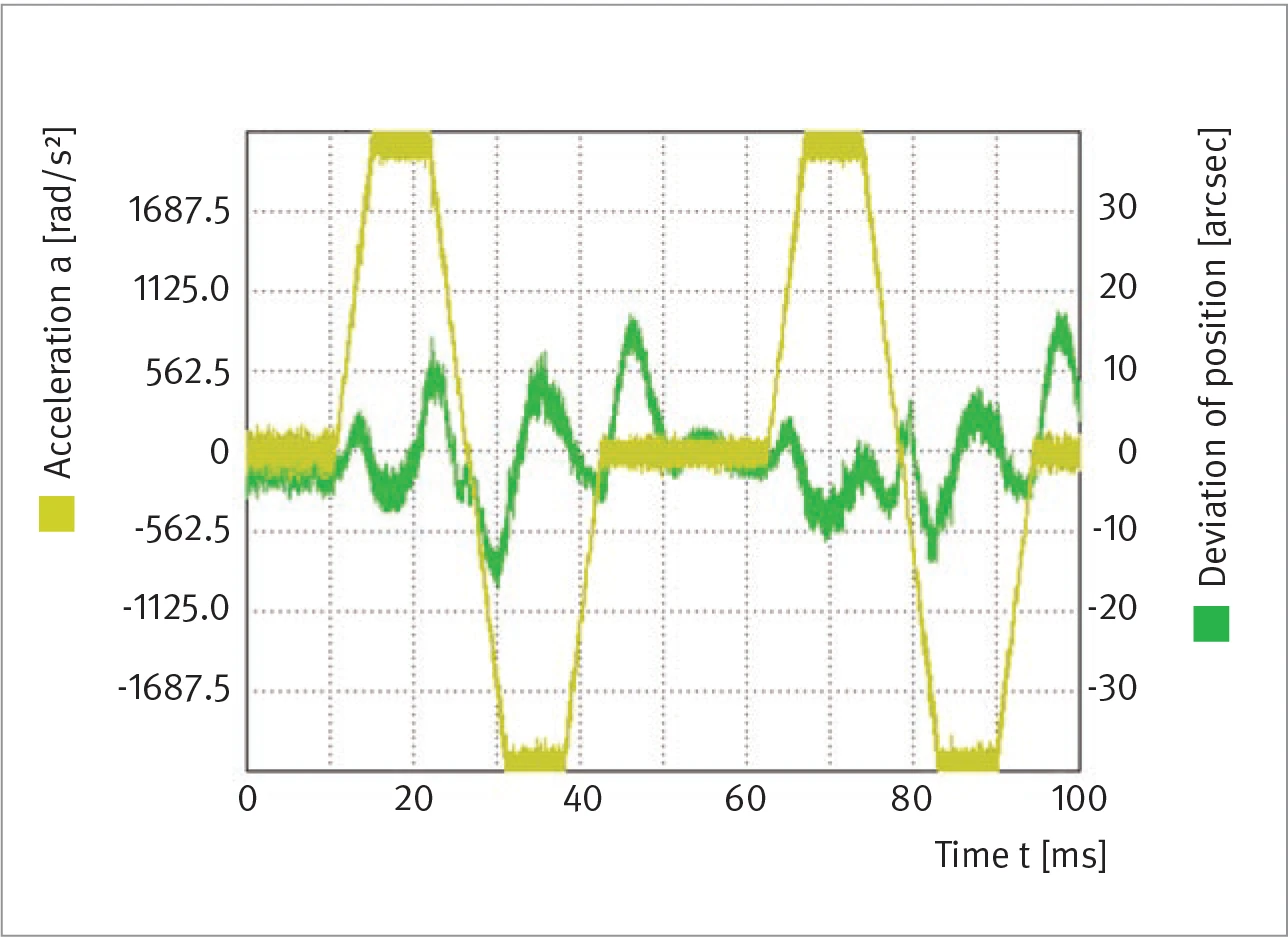
รอบการวางตำแหน่ง (ซ้าย): ความเร่งเชิงมุม a [rad/s²] และค่าเบี่ยงเบนตำแหน่ง [arcsec] เทียบกับเวลา t [ms]
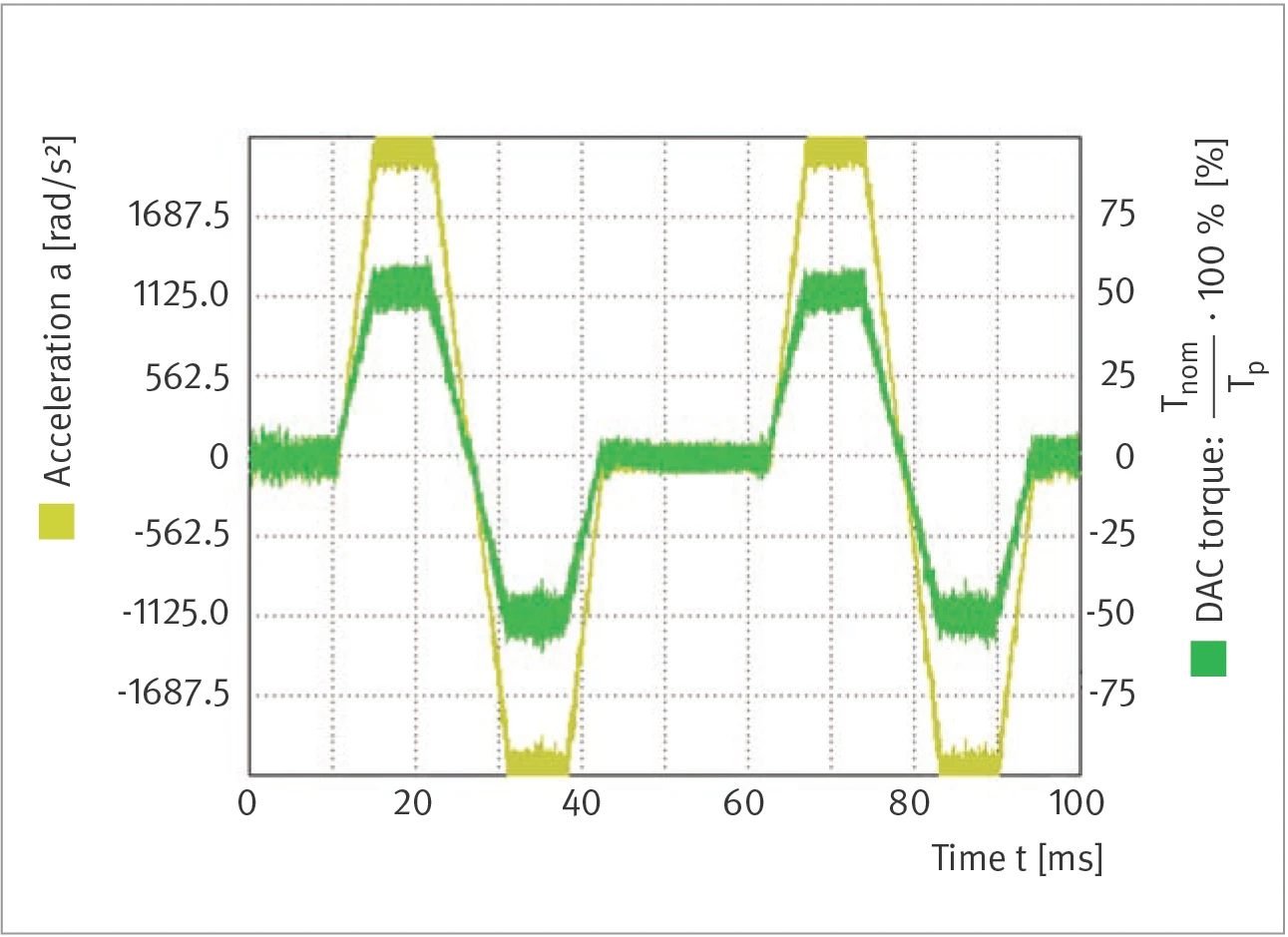
รอบการวางตำแหน่ง (ขวา): ความเร่งเชิงมุม a [rad/s²] และแรงบิด DAC [% Tnom/Tp] เทียบกับเวลา t [ms]
Tp: แรงบิดสูงสุด (Peak torque); Tnom: แรงบิดพิกัด (Nominal torque)
การกำหนดค่าระบบ (System Configuration)
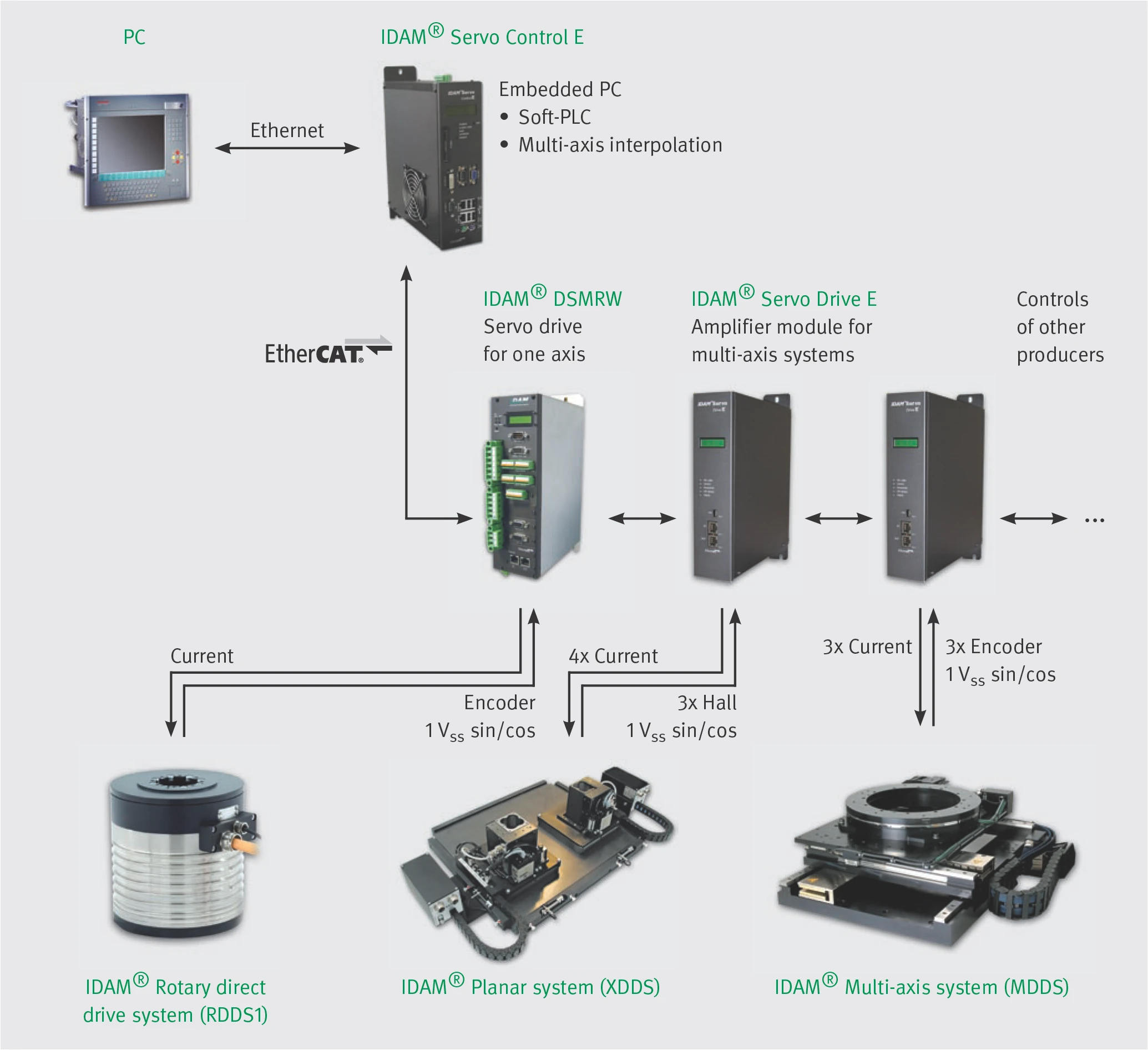
โครงสร้างการกำหนดค่าระบบ: การเชื่อมต่อ RDDS1, IDAM DSMRW, Servo Control E, Servo Drive E และ PC (Ethernet/EtherCAT) รองรับทั้งระบบระนาบ XDDS และระบบหลายแกน MDDS
ระบบขับเคลื่อนตรงแบบหมุน (RDDS1) สามารถทำงานร่วมกับสถาปัตยกรรมการควบคุมดังต่อไปนี้:
- IDAM® DSMRW: เซอร์โวไดร์ฟสำหรับหนึ่งแกน หรือตัวควบคุมจากผู้ผลิตอื่น
- ป้อนกลับกระแส (Current feedback)
- เอนโคเดอร์ 1 Vss sin/cos
- IDAM® Servo Control E + IDAM® Servo Drive E (โมดูลขยายหลายแกน)
- เชื่อมต่อ Ethernet กับ PC (Embedded PC พร้อม Soft-PLC และการสอดแทรกหลายแกน)
- รองรับระบบ IDAM® RDDS1 (หมุน), IDAM® XDDS (ระนาบ), IDAM® MDDS (หลายแกน)
- ตัวควบคุมจากผู้ผลิตอื่น (Controls of other producers)
โหลดเพิ่มเติม (Additional Loads)
รูปต่อไปนี้แสดงกรณีโหลดที่เป็นไปได้ของระบบหมุน แรงภายนอกหรือมวลเพิ่มเติมก่อให้เกิดโหลดเฉพาะต่อระบบหมุน ขึ้นอยู่กับจุดที่ใช้แรงและตำแหน่ง
แรงตามแกนและโหลดในแนวแกน
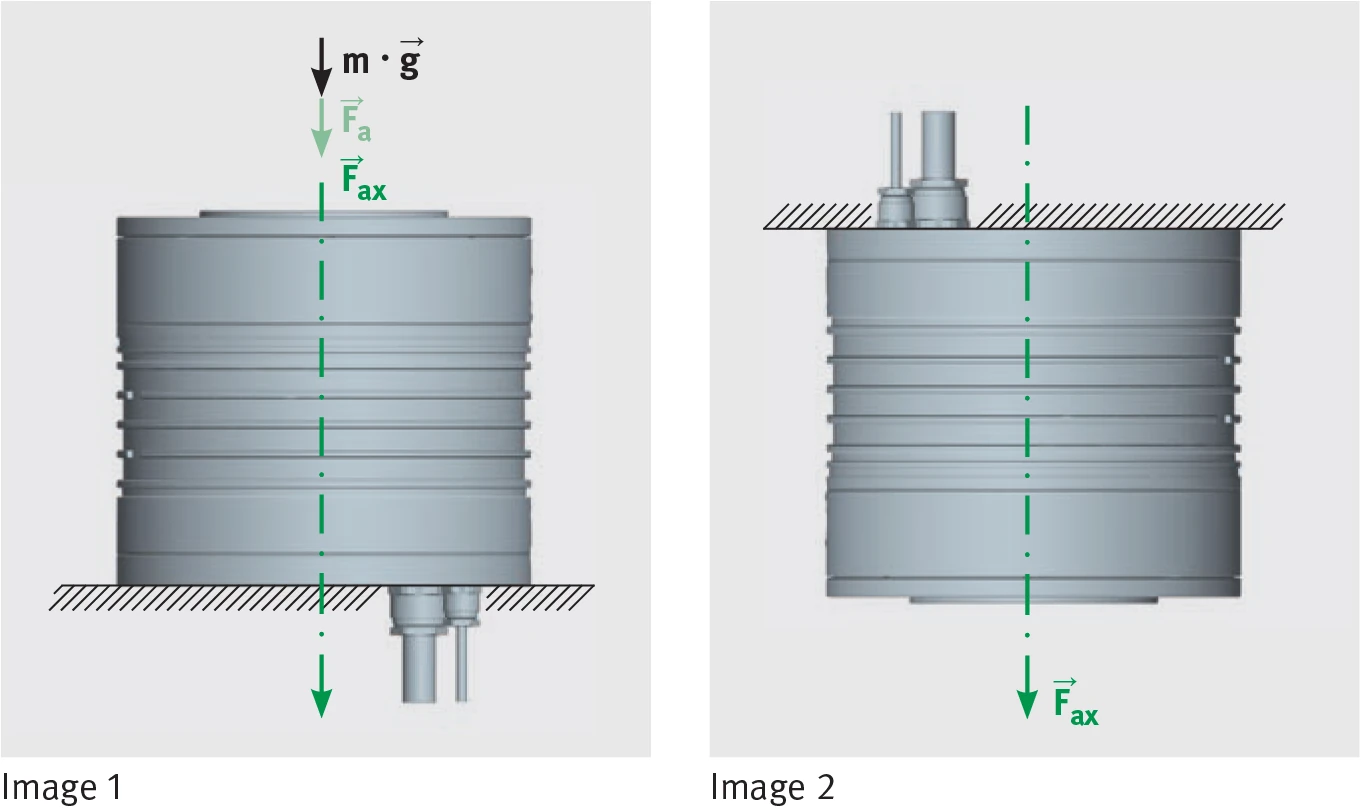
รูปที่ 1 และ 2: แรงในแนวแกนรวม Fax = Fa + m × g สำหรับการจัดวางแบบศูนย์กลาง (สองทิศทางการประกอบ)
แรงภายนอกที่กระทำที่ศูนย์กลางซึ่งแนวการกระทำของแรงเหมือนกับแกนหมุน (Fa) รวมถึงมวลเพิ่มเติมที่จัดวางแบบศูนย์กลาง (m) จะก่อให้เกิดแรงในแนวแกนรวม (Fax) เมื่อประกอบระบบหมุนแบบรูปที่ 1 และ 2:
Fax = Fa + m × g
แรงบิดเอียง (การเยื้องศูนย์ตามแกน)
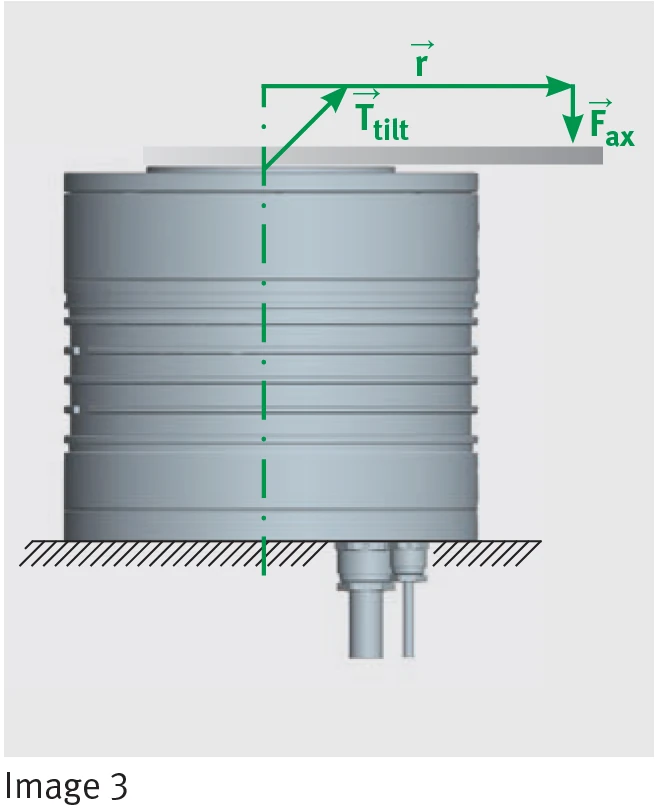
รูปที่ 3: ระยะเยื้องศูนย์ r ก่อให้เกิดแรงบิดเอียง Ttilt (การติดตั้งแบบตั้งตรง)
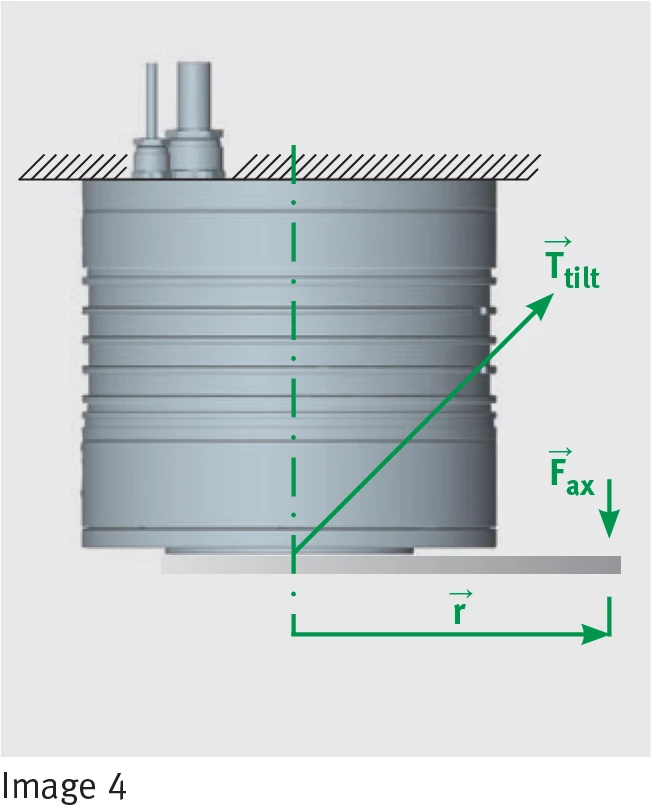
รูปที่ 4: ระยะเยื้องศูนย์ r ก่อให้เกิดแรงบิดเอียง Ttilt (การติดตั้งแบบคว่ำ)
หากแรงในแนวแกนรวม (Fax) มีระยะเยื้องศูนย์ (r) จากแกนหมุน (รูปที่ 3 และ 4) ระบบหมุนจะรับแรงบิดเอียงเพิ่มเติม:
Ttilt = r × Fax
ในกรณีที่แขนโมเมนต์และแรงตั้งฉากกัน:
|Ttilt| = |r| × |Fax| × sin 90°
Ttilt = r × Fax
แรงในแนวรัศมีและแรงบิดเอียง
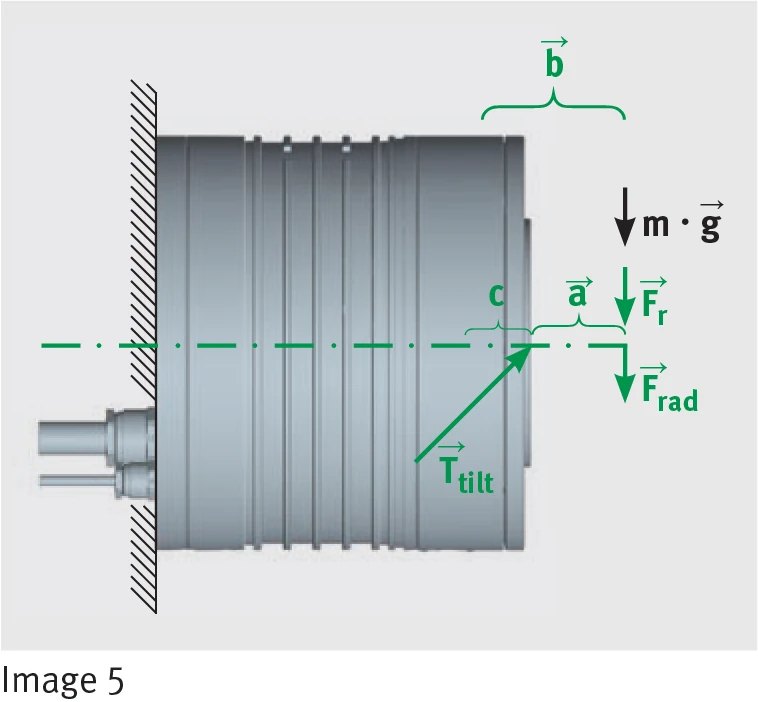
รูปที่ 5: แรงในแนวรัศมี Fr, แรงในแนวรัศมีรวม Frad, ระยะ a, b, c และแรงบิดเอียง Ttilt (การติดตั้งแบบนอน)
แรงภายนอกในแนวรัศมีที่กระทำที่ศูนย์กลางซึ่งแนวการกระทำของแรงตั้งฉากกับแกนหมุน (Fr) รวมถึงมวลเพิ่มเติมที่จัดวางแบบศูนย์กลาง (m) จะก่อให้เกิดแรงในแนวรัศมีรวม (Frad) เมื่อประกอบระบบหมุนแบบรูปที่ 5:
Frad = Fr + m × g
จุดที่ใช้แรงในแนวรัศมี (Frad) โดยทั่วไปอยู่ที่ระยะ (a) จากแผ่นสเตจ และโหลดในแนวรัศมีก่อให้เกิดแรงบิดเอียงเพิ่มเติม แรงบิดเอียงตามรูปที่ 5 คือ:
Ttilt = b × Frad
เมื่อแขนโมเมนต์และแรงตั้งฉากกัน เช่นเดียวกับข้างต้น:
|Ttilt| = |b| × |Frad| × sin 90°
Ttilt = b × Frad
ระยะ b ตามรูปที่ 5 คือ:
b = a + c
ดังนั้นแรงบิดเอียงคือ:
Ttilt = (a + c) × Frad
c คือค่าเฉพาะสำหรับแต่ละขั้นเส้นผ่านศูนย์กลาง:
| RDDS1 | c [m] |
|---|---|
| 130xH | 0.028 |
| 160xH | 0.032 |
| 180xH | 0.026 |
| 230xH | 0.029 |
หมายเหตุ: ไม่ว่ากรณีใดก็ตาม ห้ามเกินค่าจำกัดที่กำหนด (Fax, Frad, Ttilt) กรุณาติดต่อเราหากมีความต้องการโหลดที่สูงกว่า
การเลือกระบบขับเคลื่อนตรง (Selection of Direct Drives for Rotary Applications)
การใช้งานแบบรอบ (Cycled Applications)
ในการทำงานแบบรอบ การเคลื่อนที่วางตำแหน่งตามลำดับสลับกับช่วงหยุดพักที่ไม่มีการเคลื่อนที่ ลำดับการวางตำแหน่งแบบง่ายประกอบด้วยการเคลื่อนที่ที่มีความเร่งบวกตามด้วยการชะลอ (ความเร่งลบที่มักมีขนาดเดียวกัน ซึ่งในกรณีนี้เวลาเร่งและชะลอเท่ากัน) ความเร็วเชิงมุมสูงสุด ωmax ถึงได้เมื่อสิ้นสุดช่วงเร่ง
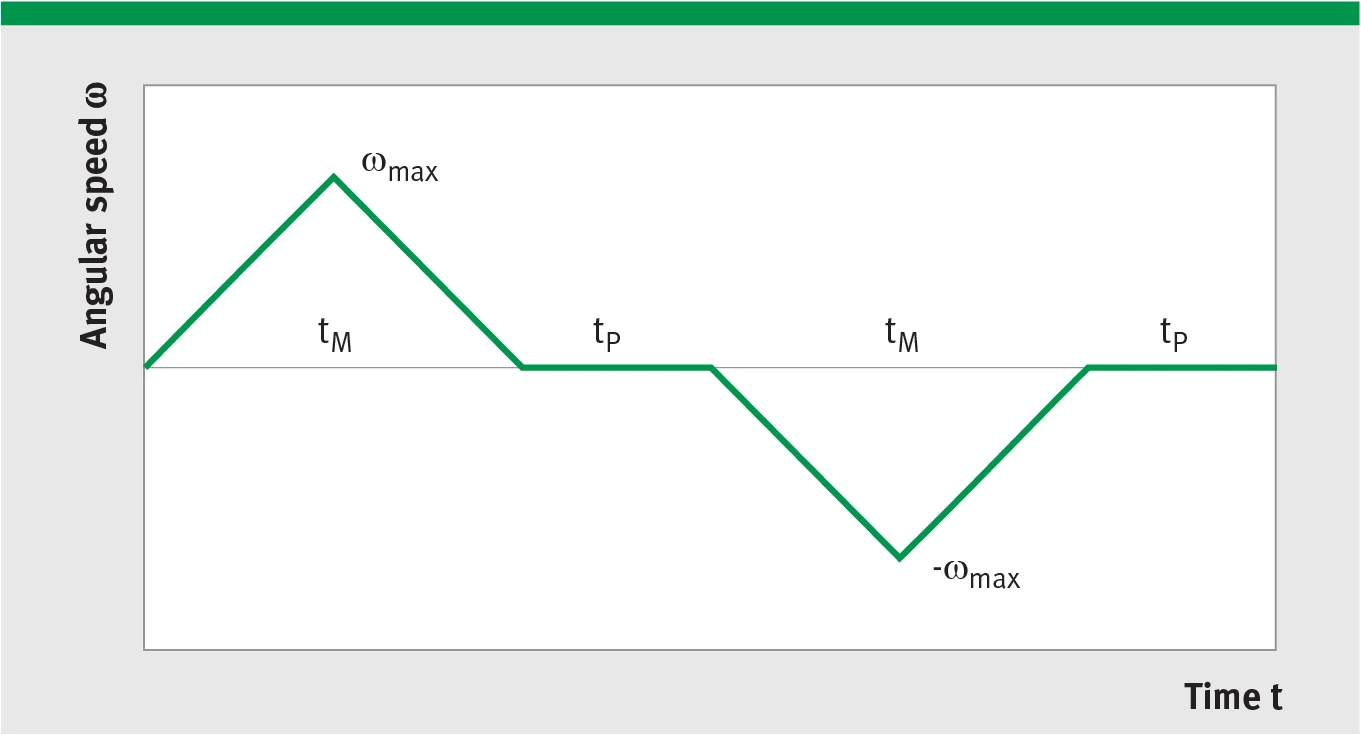
ความเร็วเชิงมุม ω เทียบกับเวลา t: แสดง ωmax, −ωmax, เวลาเคลื่อนที่ tM และเวลาหยุดพัก tP ของการเคลื่อนที่ไป-กลับแบบรอบ
จากนี้จะได้แผนภาพ α(t) (α: ความเร่งเชิงมุม) รวมถึงการไหลของแรงบิดที่ต้องการสำหรับการเคลื่อนที่:
T = J × α
(T: แรงบิด [Nm], J: โมเมนต์ความเฉื่อยมวล [kgm2], α: ความเร่งเชิงมุม [rad/s2])
รอบถูกอธิบายในแผนภาพ ω(t) (ω: ความเร็วเชิงมุม, t: เวลา) แผนภาพแสดงการเคลื่อนที่ไป-กลับพร้อมช่วงหยุดพัก (tM: เวลาเคลื่อนที่, tP: เวลาหยุดพัก)
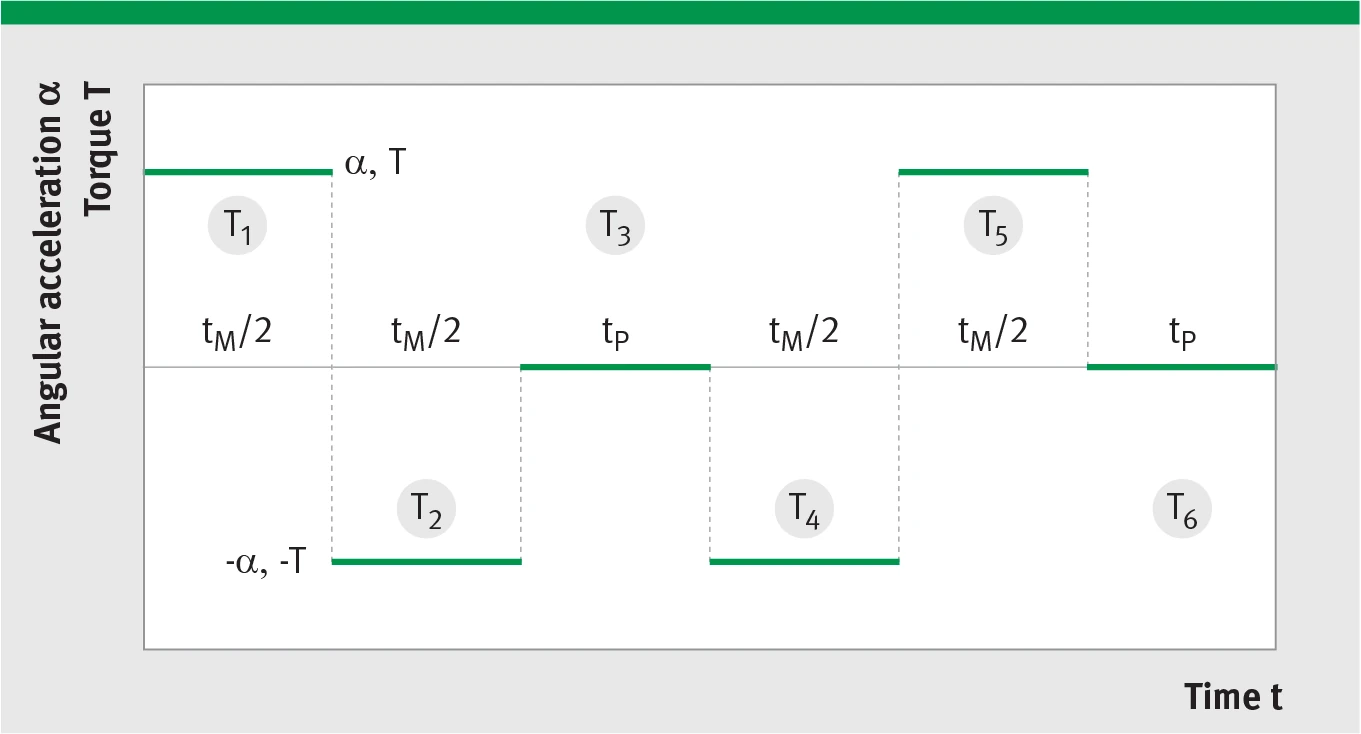
ความเร่งเชิงมุม α และแรงบิด T เทียบกับเวลา t: รอบแรงบิดหกส่วน T1–T6 แสดงส่วนเวลา tM/2 และ tP
ตามการไหลของแรงบิดของรอบจังหวะที่ต้องการ มอเตอร์ถูกเลือกตามเกณฑ์สามข้อ:
- แรงบิดสูงสุดในรอบ M: Tp (แรงบิดสูงสุด) ตามแผ่นข้อมูล
- แรงบิดประสิทธิผลในรอบ M: Tc (มอเตอร์ไม่มีการระบายความร้อน) หรือ Tcw (ระบายความร้อนด้วยน้ำ) ตามแผ่นข้อมูล
- ความเร็วรอบสูงสุดในรอบ M: nlp ตามแผ่นข้อมูล
แรงบิดประสิทธิผลเท่ากับค่า root mean square ของเส้นโค้งแรงบิด (รอบแรงบิดหกส่วน) ในรอบจังหวะ:
Trms = √T12·t1 + T22·t2 + … + T62·t6t1 + t2 + … + t6
ตัวประกอบความปลอดภัย 1.4 ในการคำนวณตัวอย่างยังคำนึงถึงการทำงานของมอเตอร์ในบริเวณไม่เชิงเส้นของลักษณะแรงบิด-กระแส ซึ่งสูตรสำหรับคำนวณ Teff ใช้ได้เพียงโดยประมาณเท่านั้น
กำหนด T1 = T; T2 = −T; T3 = 0; T4 = −T; T5 = T; T6 = 0 และ t1 = tM/2; t2 = tM/2; t3 = tP; t4 = tM/2; t5 = tM/2; t6 = tP คำนวณแรงบิดประสิทธิผลได้:
Trms = Tnom × √tMtM + tP
สมการนี้ใช้กับแรงบิดประสิทธิผลเมื่อแรงบิดที่มีขนาดเดียวกันกระทำในรอบจังหวะ (โมเมนต์ความเฉื่อยมวลและความเร่งเชิงมุมคงที่) ใต้เครื่องหมายรากปรากฏ: "ผลรวมเวลาเคลื่อนที่หารด้วยผลรวมเวลาเคลื่อนที่และเวลาหยุดพัก" ตัวส่วนจึงเป็นเวลารอบ
ความเร่งเชิงมุม ความเร็วเชิงมุมสูงสุด และความเร็วรอบสูงสุดของการเคลื่อนที่วางตำแหน่งคำนวณด้วย:
α = 4 × φ / tM2
ωmax = α × tM / 2
nmax = 60 / (2 × π) × ωmax
| สัญลักษณ์ | คำอธิบาย | หน่วย |
|---|---|---|
| φ | มุมการเคลื่อนที่ (Motion angle) | rad |
| tM | เวลาเคลื่อนที่ (Motion time) | s |
| α | ความเร่งเชิงมุม (Angular acceleration) | rad/s2 |
| ωmax | ความเร็วเชิงมุมสูงสุด (Maximum angular speed) | rad/s |
| nmax | ความเร็วรอบสูงสุด (Maximum rotary speed) | rpm |
หากตั้งค่าการจำกัด jerk ไว้ในเซอร์โวอินเวอร์เตอร์ เวลาวางตำแหน่งจะขยายออกตามนั้น เวลาวางตำแหน่งคงที่ต้องใช้ความเร่งที่สูงกว่าในกรณีนี้
ตัวอย่างการเลือกระบบขับเคลื่อนตรงแบบหมุน (Selection of Rotary Direct Drive Systems)
ตัวอย่าง: การใช้งานแบบรอบ เช่น ระบบทดสอบ
| ค่าที่กำหนด (Preset values) | ค่า | คำอธิบาย |
|---|---|---|
| โมเมนต์ความเฉื่อยมวล J [kgm2] | 0.018 | |
| มุมการเคลื่อนที่ φ [°] | 22.5 | |
| แรงบิดเสียดทาน Tf [Nm] | 2 | |
| พื้นที่ติดตั้ง D (เส้นผ่านศูนย์กลางนอกสูงสุด) [mm] | 180 | |
| เวลาเคลื่อนที่ tM [ms] | 30 | |
| ตัวประกอบความปลอดภัย (Safety factor) | 1.4 | |
| เวลาหยุดพัก tP [ms] | 60 |
แปลงมุมการเคลื่อนที่เป็นเรเดียน:
φ = 180/π × 22.5° = 0.3927 rad
ขั้นตอนการคำนวณ:
α = 4 × 0.3927 rad / (0.03 s)2 = 1745.33 rad/s2
ωmax = 1745.33 rad/s2 × 0.03 s / 2 = 26.18 rad/s
nmax = 60 / (2 × π) × 26.18 rad/s = 250 rpm
เมื่อรวมแรงบิดเสียดทานและตัวประกอบความปลอดภัยแล้ว จะได้แรงบิดพร้อมตัวประกอบความปลอดภัยสูงสุด:
Tnom = [(0.018 kgm2 × 1745.33 rad/s2) + 2 Nm] × 1.4 = 46.78 Nm
ในกรณีนี้แรงบิดสำหรับการเร่งและการเบรกเท่ากัน แรงบิดประสิทธิผลเท่ากับค่า root mean square ของเส้นโค้งแรงบิด (รอบแรงบิดหกส่วน) ในรอบจังหวะ:
Trms = 46.78 Nm × √0.03 s0.03 s + 0.06 s = 27.01 Nm
(รอบแรงบิดหกส่วน = สองรอบ)
ผลการเลือกระบบ
ทั้งสองระบบที่เลือกได้บรรลุความเร็วรอบสูงสุด 250 rpm
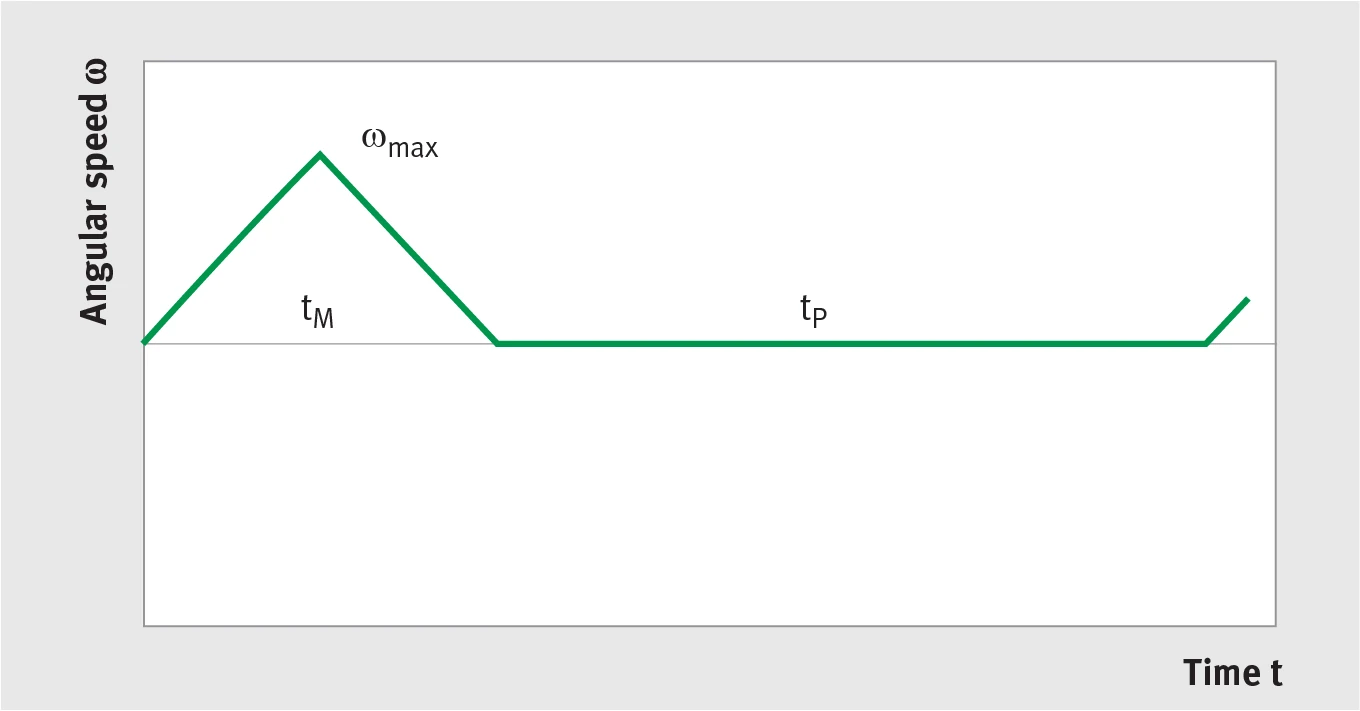
ตัวอย่างการเลือก: ความเร็วเชิงมุม ω เทียบกับเวลา t (ωmax, tM, tP)
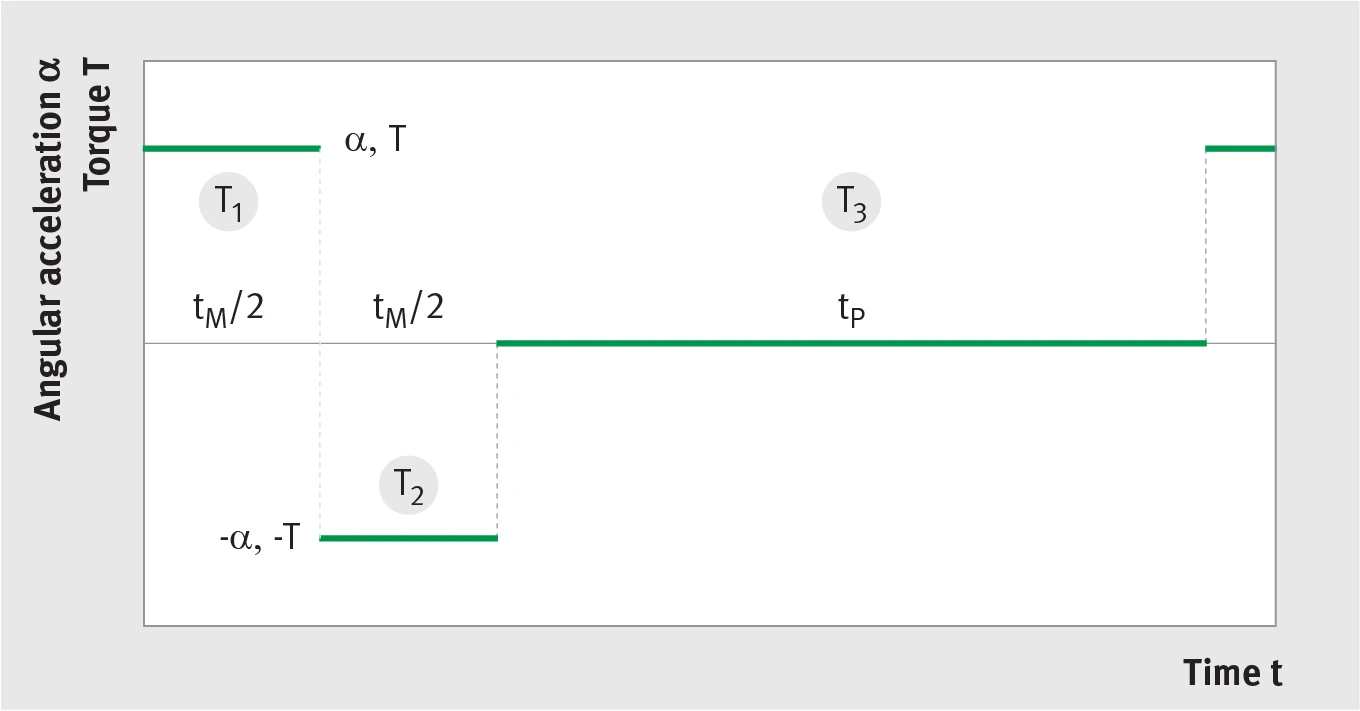
ตัวอย่างการเลือก: ความเร่งเชิงมุม α และแรงบิด T เทียบกับเวลา t (รอบแบบง่าย T1–T3)
การสอบถามและการเลือกระบบ
สำหรับการสอบถามและการเลือกระบบสำหรับการใช้งานของคุณ กรุณาอย่าลังเลที่จะติดต่อเรา