旋轉直驅優勢(Advantages of Rotary Direct Drives)
提升動態性能
- 無需運動形式轉換
- 驅動系統不存在因傳動或耦合元件引起的彈性、背隙、遲滯與摩擦。
- 多極馬達
- IDAM 馬達採多極設計,能產生極高扭矩,且可從轉速 > 0 直到連續轉速全範圍運用。
- 薄型環狀轉子
- 採用大內徑開放式薄型環形設計,轉子慣性矩極低,因此馬達可具備極高加速能力。
- 直接位置量測
- 透過直接位置量測與剛性機械結構,定位具有高動態性與高精度。
降低運營成本
- 無額外運動部件
- 驅動組件的組裝、調整與維護工作大幅減少。
- 驅動系統無磨損
- 即使承受高負載與頻繁交變負載,驅動系統仍極為耐用,機器停機時間因此降低。
- 高可用性
- 除了延長使用壽命和減少磨損外,扭矩馬達(torque motor)的堅固性亦提升了系統可用性。
提升設計靈活性
- 中空軸
- 扭矩馬達的大型開放式內徑(中空軸)設計提供極大的設計靈活性,可供管路、夾具、旋轉接頭及佈線通過馬達中心。
- 組件整合 RDDS
- 由於所需空間較小,系統可輕鬆整合至機器設計中。
- 緊湊設計
- 搭配大型開放式內徑(中空軸),系統相對於扭矩輸出極為緊湊。
- 零件數量少
- 成熟的設計有助於將系統整合至整體機器概念中;更少且更堅固的零件帶來低故障率(高 MTBF*)。
*MTBF:Mean Time Between Failures(平均故障間隔時間)
系統優勢(System Advantages)
- 高動態性能與剛性(High dynamics and stiffness)
- 極順暢的運動(Extremely smooth motion)
- 高加速(High acceleration)
- 高速度(High velocity)
- 緊湊設計(Compact design)
- 易於組裝(Easy assembly)
- 優異的靜態與動態負載剛性(Excellent static and dynamic load rigidity)
- 無背隙(No backlash)
- 低磨損、低維護系統(Low-wear and low-maintenance system)
- 小慣性(Small inertia)
- 峰值扭矩 Tp:8.9 – 369 Nm
- 量測系統(Measuring system):光學量測原理,多種增量數依型號
- 軸承(Bearing):緊湊、可承受高外部傾覆扭矩(tilting torque)、高剛性與精度、極低軸向與徑向跳動(runout)
- 自由內徑(Free inner diameter)
標準結構(Standard Design)
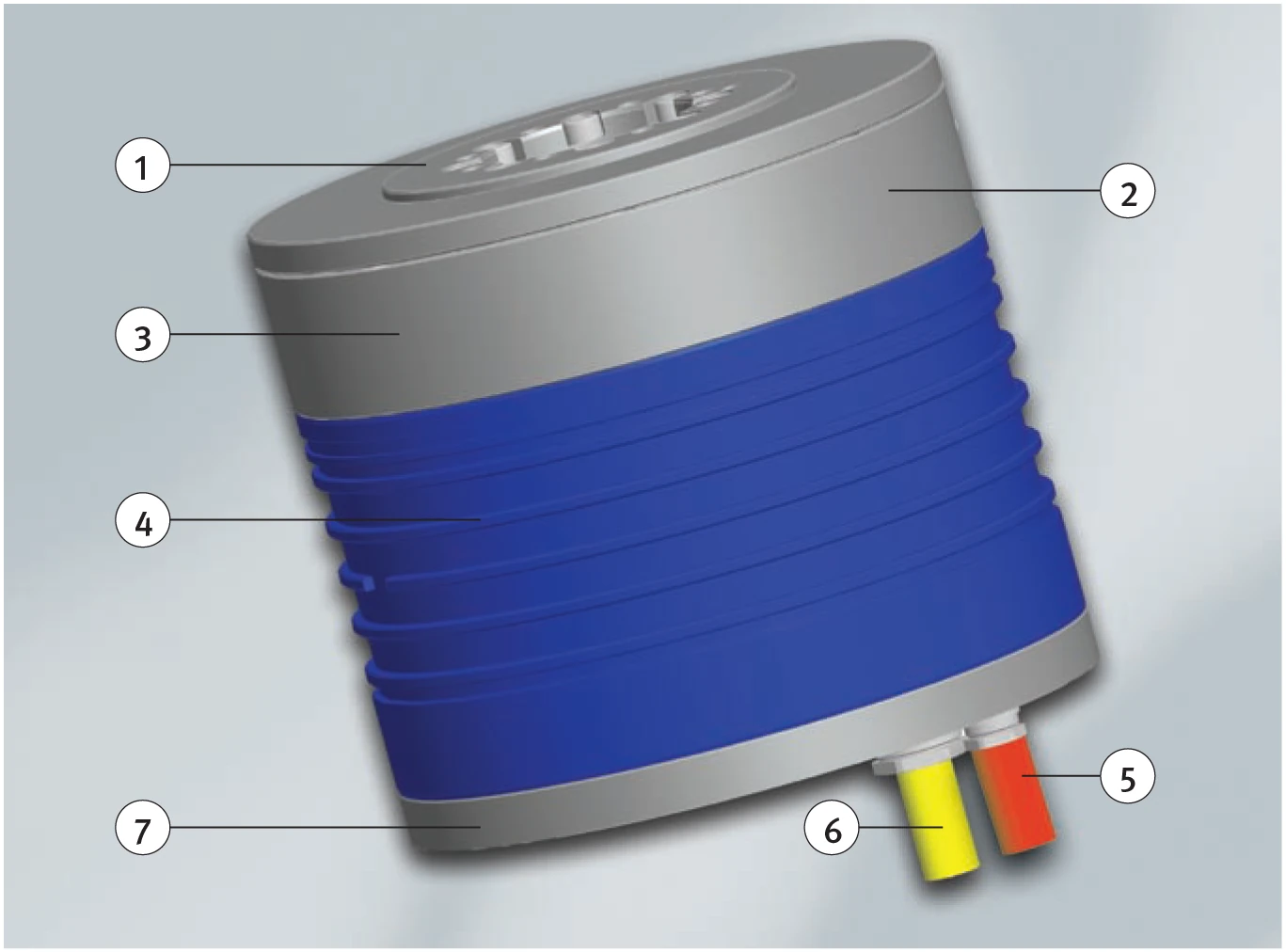
RDDS 標準結構:元件 1(載台板)至 7(底板)位置示意
RDDS 標準結構包含以下七大元件:
熱保護(Thermal Motor Protection)
監控迴路 I 與 II(Monitoring Circuit I and II)
直驅系統常在熱性能極限下運作。此外,運作過程中可能發生超過允許額定電流的不可預見過載。因此,伺服控制器一般應具備過載保護,以控制馬達電流。馬達電流的有效值(均方根值)只能在短時間內超過馬達允許的額定電流。這種間接式溫度監控快速且可靠。
IDAM 馬達配備溫度感測器(PTC 與 KTY),應用於熱保護。
監控迴路 I(Monitoring Circuit I)
三相繞組配備三個串聯的 PTC 以確保馬達保護。PTC 為正溫度係數熱敏電阻(Positive Temperature Coefficient thermistor),安裝後其熱時間常數低於 5 s。
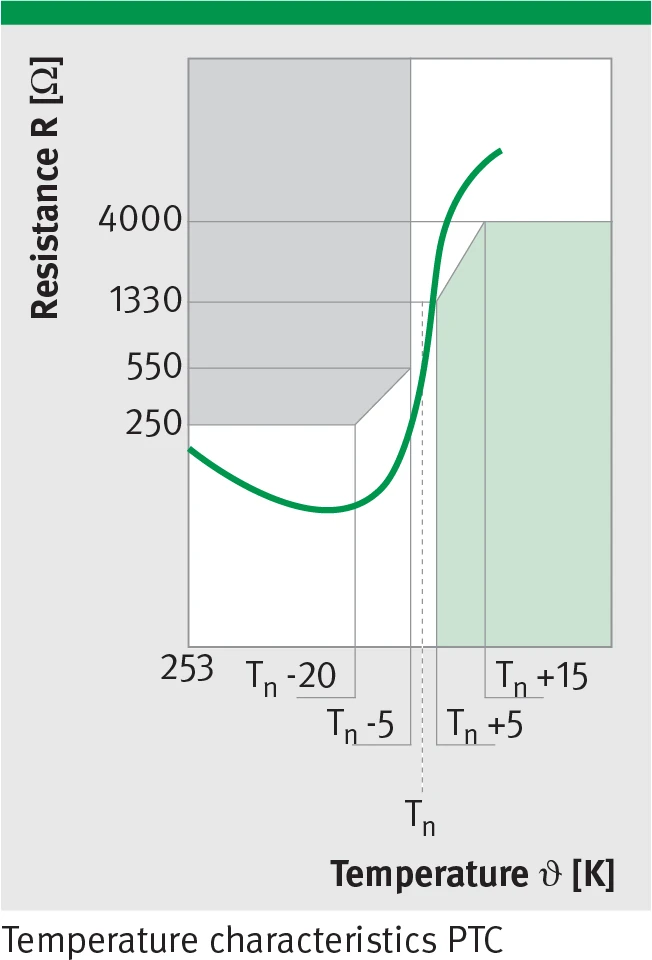
PTC 溫度特性:電阻 R [Ω] 對溫度 ϑ [K] 曲線,超過額定響應溫度 Tn 後電阻急劇上升
PTC 溫度特性(Temperature characteristics PTC)
電阻值 R [Ω] 與溫度 ϑ [K] 的對應(由來源文字擷取):
| 溫度 | Tn-20 | Tn-5 | Tn | Tn+5 | Tn+15 |
|---|---|---|---|---|---|
| 電阻 R [Ω] | 250 | 550 | 1330 | 4000 | — |
Tn:額定響應溫度(Nominal response temperature)
與 KTY 不同,PTC 電阻在超過額定響應溫度 Tn 時急劇上升,可達冷態值的數倍。三個 PTC 串聯後,即使僅一個元件超過 Tn,整體電阻也會產生明顯變化。使用三個感測器可確保馬達在不對稱相位負載靜止狀態下,仍能觸發安全停機信號。
商用馬達保護跳脫裝置通常在 1.5 至 3.5 kΩ 之間動作,因此可在每個繞組數度誤差範圍內偵測到過溫。若 PTC 迴路電阻過低,跳脫裝置亦會動作,通常表示監控迴路異常,並確保控制器與馬達感測器之間的安全電氣隔離。馬達保護跳脫裝置不包含在供貨範圍內。
注意:PTC 不適用於溫度量測。如需溫度量測,應使用 KTY。如有需求,可在客戶要求下整合其他監控感測器。原則上,PTC 感測器信號必須被監控,以防止過溫。
監控迴路 II(Monitoring Circuit II)
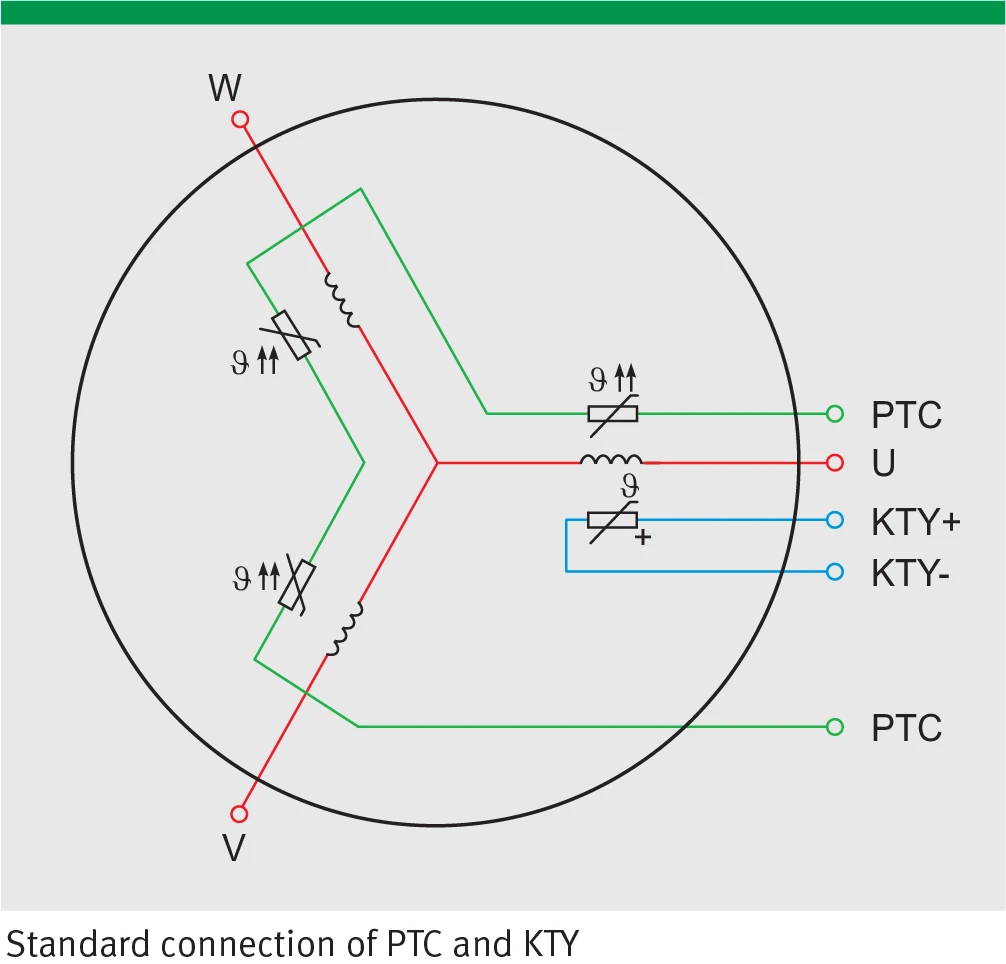
PTC 與 KTY 標準接線圖:三相繞組(U、V、W)各配置 PTC,單相(U)配置 KTY84-130
馬達其中一相配備額外的 KTY84-130 感測器,此感測器為正溫度係數半導體電阻(semiconductor resistor with positive temperature coefficient)。
溫度等效信號的產生具有延遲,延遲時間取決於馬達類型。為防止馬達過溫,控制器中定義了切斷限制值。馬達靜止時,常電流流過繞組,電流大小取決於各極點位置。
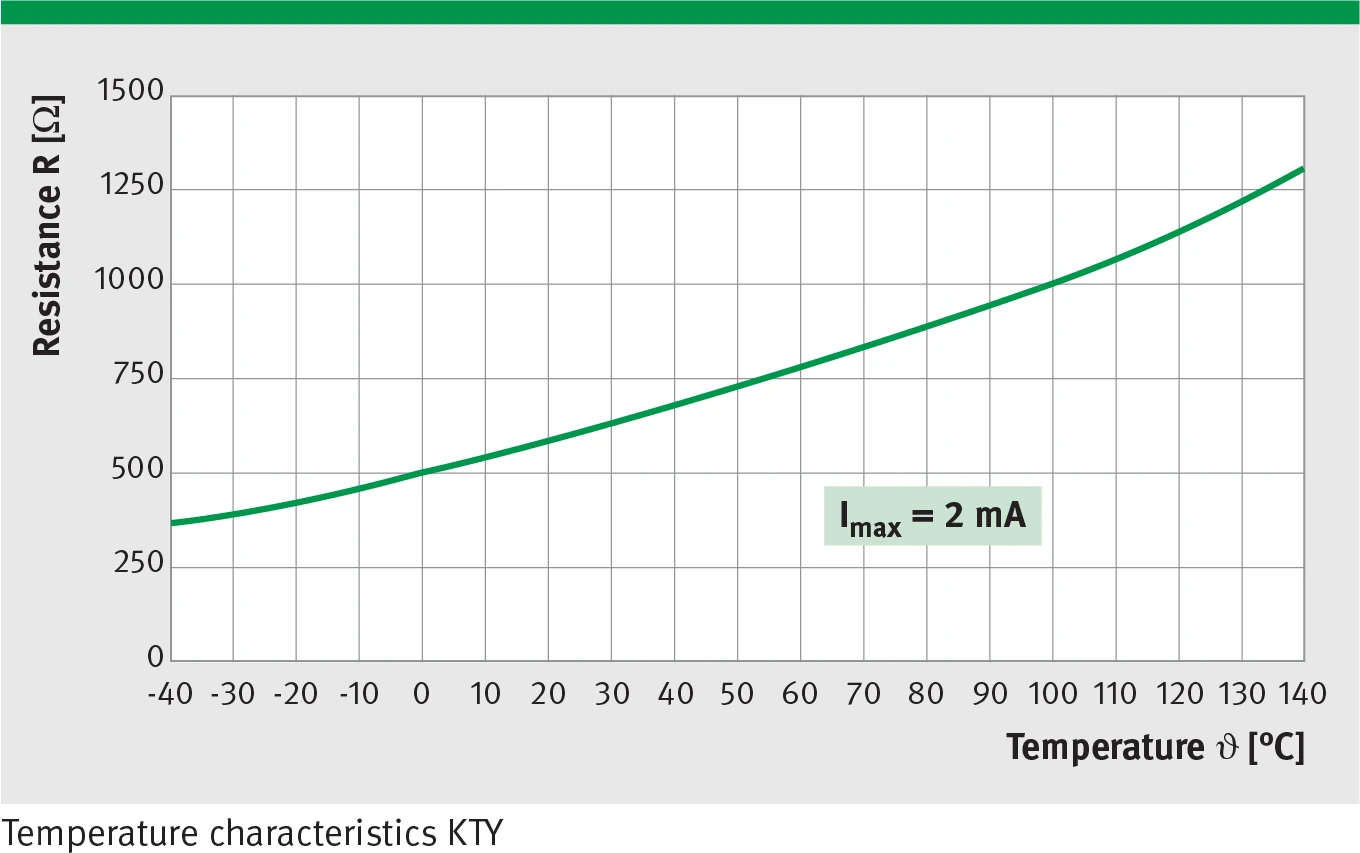
KTY 溫度特性:電阻 R [Ω] 對溫度 ϑ [°C] 曲線(-40 至 140 °C),量測電流 Imax = 2 mA
因此馬達受熱不均勻,可能導致未被監控繞組過熱。PTC 與 KTY 感測器對馬達具基本絕緣,不適合依據 DIN EN 50178 標準直接連接至 PELV/SELV 電路。
注意:KTY 感測器僅監控單一繞組,其信號可用於溫度監視或警告,但不允許單獨用於切斷。
電氣連接(Electrical Connections)
RDDS1 矩陣的標準電纜連接為軸向出線,位置於圖紙中定義。電纜從馬達出口的長度為 1.0 m,線端開放並配有端套。所用電纜符合 UL 認證,適用於拖鏈(cable drag chains)。
旋轉系統可選配直接安裝於外殼的插頭,或連接電纜末端的耦合插頭。
系統旋轉正方向
載台板(stage plate)的標準旋轉方向為逆時針方向,但依連接形式可能有所不同。
接腳配置 — 電纜連接(標準)
電纜類型:4G1.5 + 2x (2x0.75) KAWEFLEX 5281,外徑 Ø 12.6 mm,動態彎曲半徑 95 mm,靜態彎曲半徑 63 mm
| 馬達(Motor) | |
|---|---|
| 芯線(Core) | 信號(Signal) |
| 1 | 相 U(Phase U) |
| 2 | 相 V(Phase V) |
| 3 | 相 W(Phase W) |
| GNYE | PE |
| 5 | PTC(3x 串聯,所有相) |
| 6 | PTC(3x 串聯,所有相) |
| 7 | + 溫度感測器 KTY84-130(單相) |
| 8 | - 溫度感測器 KTY84-130(單相) |
| Shield | |
電纜類型:12x0.08 NJ AWM STYLE 20963,外徑 Ø 3.7 mm,動態彎曲半徑 40 mm,靜態彎曲半徑 8 mm
| 量測系統 1 Vpp(Measuring system 1 Vpp) | |
|---|---|
| 芯線(Core) | 信號(Signal) |
| GN | U1+ |
| BN | U1- |
| BK | U2+ |
| RD | U2- |
| GY | U0+ |
| PK | U0- |
| WH | GND |
| BU | +5 V |
| Shield | |
接腳配置 — 插頭連接(選配)
RDDS1-130xH:9 極 M17 安裝插頭
| 馬達(Motor)— 9 極 M17 安裝插頭 | |
|---|---|
| 接腳(Pin) | 信號(Signal) |
| 1 | 相 U(Phase U) |
| 2 | 相 V(Phase V) |
| 3 | 相 W(Phase W) |
| PE | PE |
| A | PTC(3x 串聯,所有相) |
| B | PTC(3x 串聯,所有相) |
| C | NC |
| D | + 溫度感測器 KTY84-130(單相) |
| E | - 溫度感測器 KTY84-130(單相) |
| Case | Shield |
| 量測系統 1 Vpp — 17 極 M17 安裝插頭 | |
|---|---|
| 接腳(Pin) | 信號(Signal) |
| 1 | +5 V Sense |
| 2 | NC |
| 3 | NC |
| 4 | GND Sense |
| 5 | NC |
| 6 | NC |
| 7 | +5 V |
| 8 | NC |
| 9 | NC |
| 10 | GND |
| 11 | NC |
| 12 | U2+ |
| 13 | U2- |
| 14 | U0+ |
| 15 | U1+ |
| 16 | U1- |
| 17 | U0- |
| Case | Shield |
RDDS1-160xH、RDDS1-180xH、RDDS1-230xH 及 MA/MU/MD 連接變體(所有尺寸)
RDDS1-160xH、RDDS1-180xH、RDDS1-230xH 採用 8 極 M23 安裝插頭;連接變體 MA/MU/MD(所有尺寸)採用 8 極 M23 耦合插頭(位於電纜末端)。
| 馬達(Motor)— 8 極 M23 安裝插頭 | |
|---|---|
| 接腳(Pin) | 信號(Signal) |
| 1 | 相 U(Phase U) |
| 4 | 相 V(Phase V) |
| 3 | 相 W(Phase W) |
| 2 / PE | PE |
| A | PTC(3x 串聯,所有相) |
| B | PTC(3x 串聯,所有相) |
| C | + 溫度感測器 KTY84-130(單相) |
| D | - 溫度感測器 KTY84-130(單相) |
| Case | Shield |
| 量測系統 1 Vpp — 12 極 M23 安裝插頭 / 耦合插頭 | |
|---|---|
| 接腳(Pin) | 信號(Signal) |
| 1 | U2- |
| 2 | +5 V Sense |
| 3 | U0+ |
| 4 | U0- |
| 5 | U1+ |
| 6 | U1- |
| 7 | NC |
| 8 | U2+ |
| 9 | NC |
| 10 | GND |
| 11 | GND Sense |
| 12 | +5 V |
| Case | Shield |
換相(Commutation)
旋轉直驅系統優先以換相(commutated)模式運行。IDAM 扭矩馬達標準配置不含 Hall 感測器。IDAM 建議採用量測系統相關換相方式,因為現代伺服變頻器與控制器均支援此方式。
絕緣電阻(Insulation Strength)
母線電壓(link voltage)最高 600 VDC 的絕緣強度。
IDAM 馬達符合 EC 指令 73/23/EEC 及歐洲標準 EN 50178 與 EN 60204。出廠前以差異化高壓測試方法進行測試,並在真空環境下澆注。請確保遵守馬達型號相關的工作電壓。
變頻器運行時馬達端子的過電壓
由於快速切換的功率半導體產生高 du/dt 負荷,當馬達與變頻器之間使用較長連接電纜(約 5 m 以上)時,馬達端子可能出現顯著高於實際變頻器電壓的電壓尖峰,對馬達絕緣造成極高負荷。
注意:
- PWM 模組的 du/dt 值不得超過 8 kV/µs。
- 馬達連接電纜應盡可能短。
- 為保護馬達,應在特定配置中使用示波器量測施加於馬達繞組相對 PE 的電壓(PWM)。現有電壓尖峰不應明顯超過 1 kV。從約 2 kV 起,應預期絕緣逐漸損壞。
- 請遵守控制器製造商提供的建議與配置注意事項。
IDAM 工程師將協助您的應用,並協助判斷和降低過高電壓。
冷卻與冷卻迴路(Cooling and Cooling Circuit)
功率損耗與熱損耗
除了由馬達常數 km 決定的功率損耗外,馬達還承受頻率依存的損耗,尤其在較高控制頻率(50 Hz 以上)時更為顯著。這些損耗共同造成馬達及其他系統組件升溫。
在馬達低控制頻率(< 80 Hz)下,以下規則適用:馬達常數 km 高的馬達,相較於 km 較低的同規格馬達,所產生的功率損耗更低。
馬達運行期間產生的功率損耗,透過馬達組件傳遞至相連元件。整體系統精心設計,透過對流、傳導與輻射三種方式影響並控制熱分佈。
液冷馬達的連續扭矩約為無冷卻馬達的兩倍。旋轉直驅系統的選型與整合必須根據安裝空間、精度與冷卻需求進行。
對於高性能機器及高動態運作且對應高軸承負載的設備,建議優先採用主動冷卻。
冷卻設計
系統冷卻設計為套式冷卻(jacket cooling),應由客戶連接至冷卻裝置的冷卻迴路。冷卻套作為選配件隨馬達提供,或已作為機器結構的整合部分由客戶供應。
冷卻介質(cooling medium)從入口通過不同高度的冷卻肋孔道流向出口。入口與出口接頭可依需求分配至兩個連接口。流道以 O 形環密封。
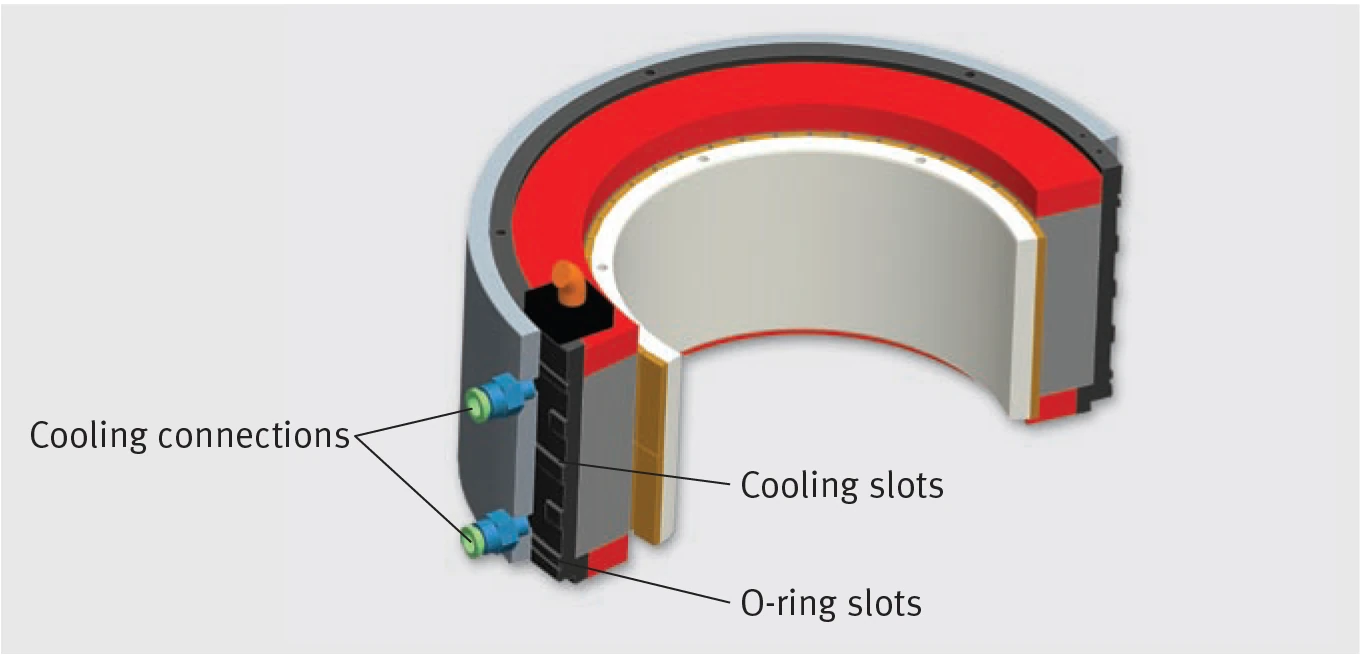
冷卻套剖面:冷卻接頭(Cooling connections)、冷卻槽(Cooling slots)及 O 形環槽(O-ring slots)位置示意
注意:使用水作為冷卻劑時,必須加入添加劑以防止冷卻迴路中的腐蝕與生物沉積。
冷卻介質溫度依存性(Dependency of Characteristic Data on the Supply Temperature of Cooling Medium)
資料表中水冷運行的連續電流 Icw 是在額定供應溫度 ϑnV = 25 °C 下可達到的。較高的供應溫度 ϑV 將導致冷卻性能降低,進而降低額定電流。縮減後的連續電流 Ic red 可由以下二次方程式計算:
Ic red = Icw × √ϑmax − ϑVϑmax − ϑnV
| 符號 | 說明 | 單位 |
|---|---|---|
| Ic red | 縮減後連續電流(Reduced continuous current) | A |
| Icw | 水冷連續電流,於 ϑnV 下(Continuous current, cooled at ϑnV) | A |
| ϑV | 目前供應溫度(Current supply temperature) | °C |
| ϑnV | 額定供應溫度(Rated supply temperature) | °C |
| ϑmax | 最大允許繞組溫度(Maximum permissible winding temperature,適用於恆定馬達電流) | °C |
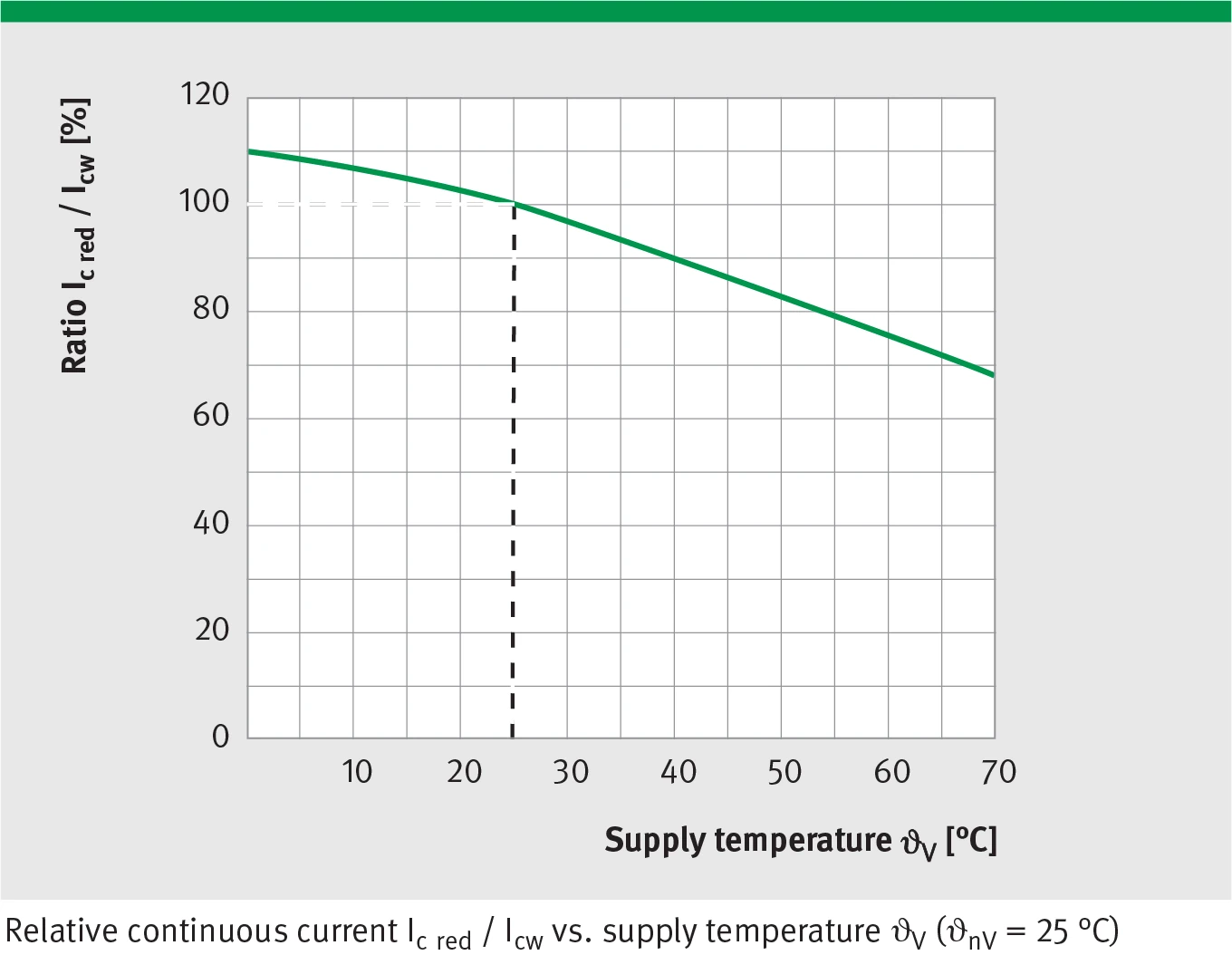
相對連續電流 Ic red / Icw [%] 對供應溫度 ϑV [°C] 曲線(額定供應溫度 ϑnV = 25 °C)
定位週期(Positioning Cycle)
以下定位週期範例使用系統 RDDS1-160x195-S-B-CA-WM-9000:
範例系統參數
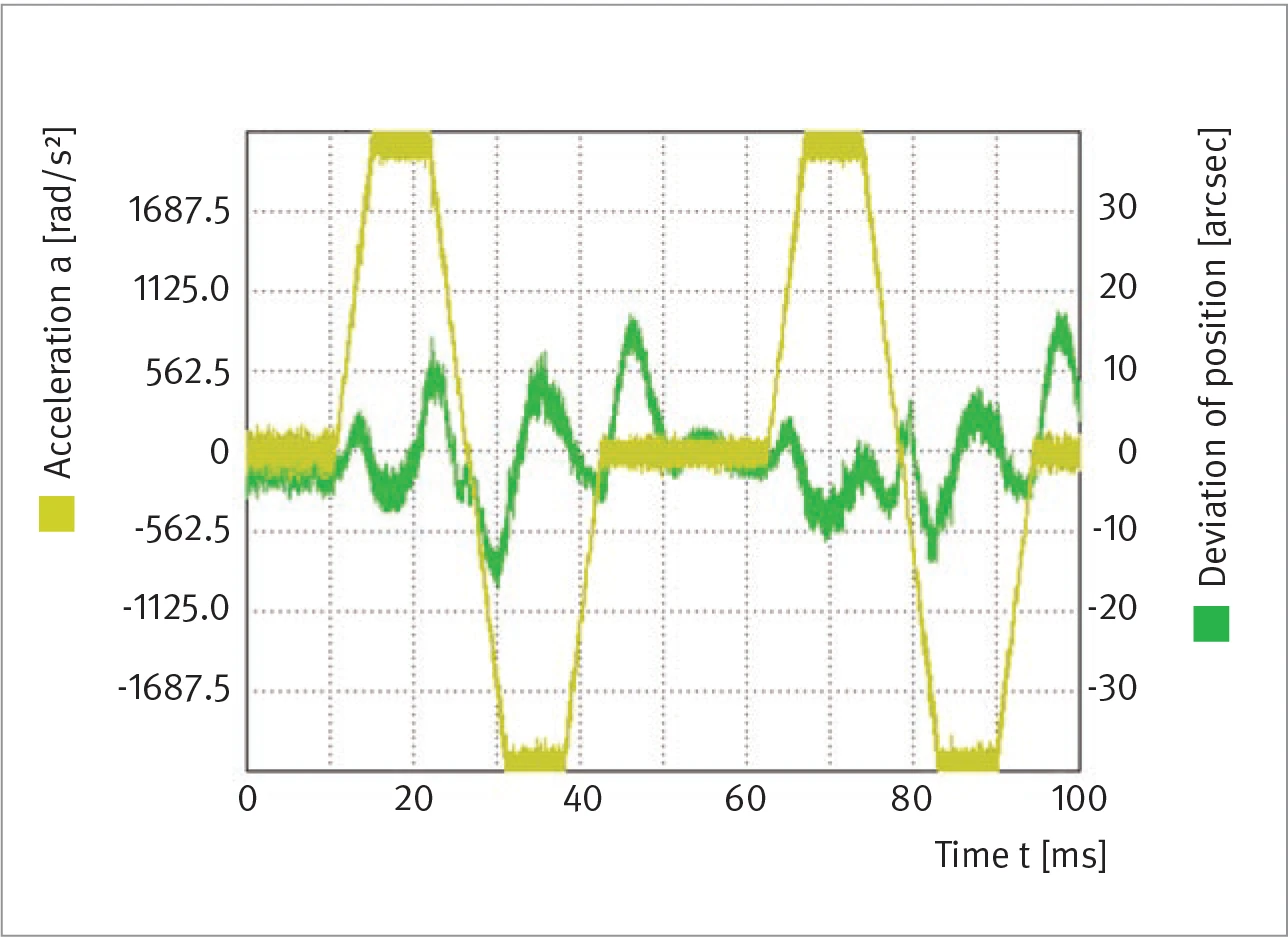
定位週期(左):角加速度 a [rad/s²] 與位置偏差 [arcsec] vs. 時間 t [ms]
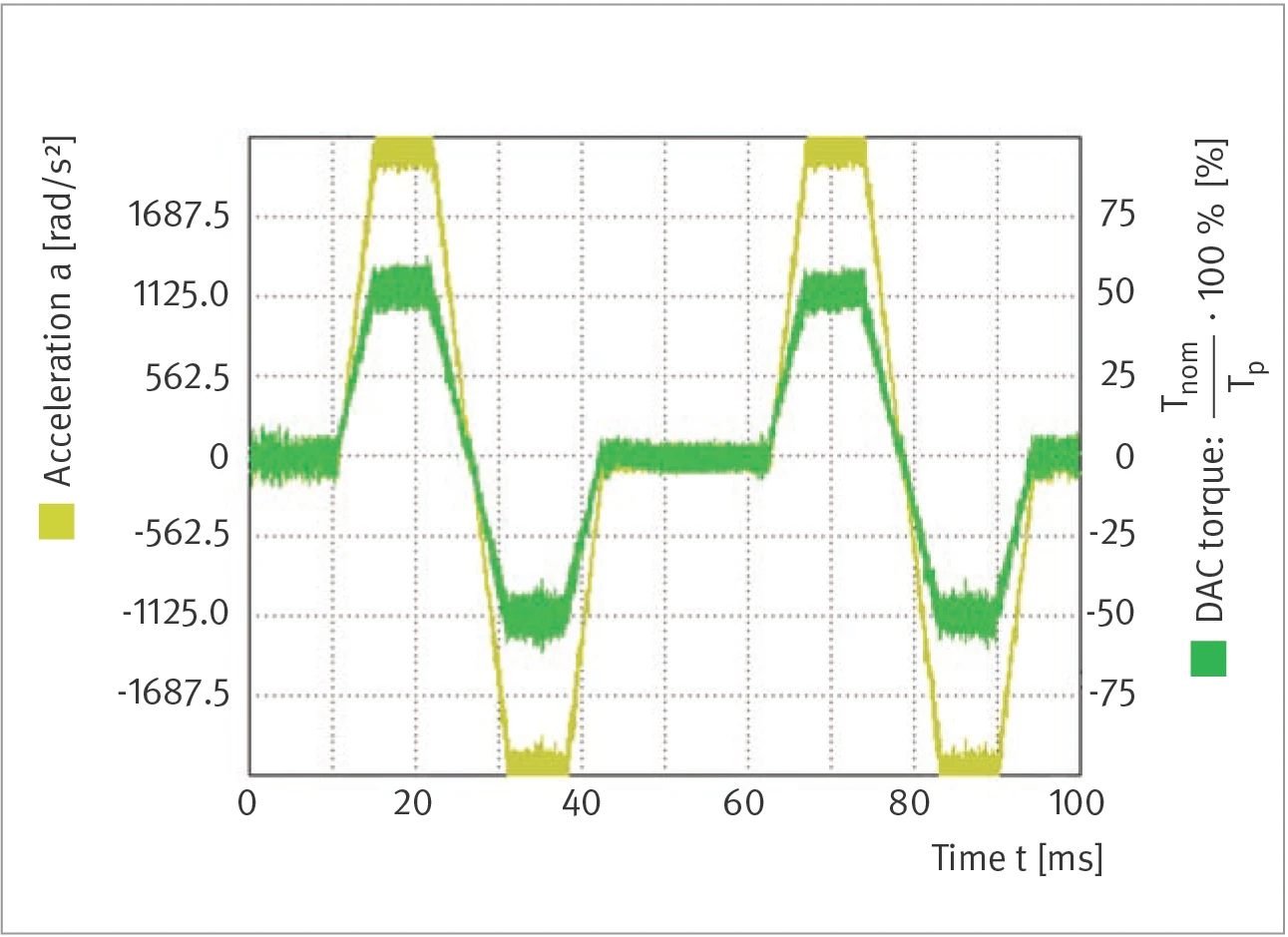
定位週期(右):角加速度 a [rad/s²] 與 DAC 扭矩 [% Tnom/Tp] vs. 時間 t [ms]
Tp:峰值扭矩(Peak torque);Tnom:額定扭矩(Nominal torque)
系統配置(System Configuration)
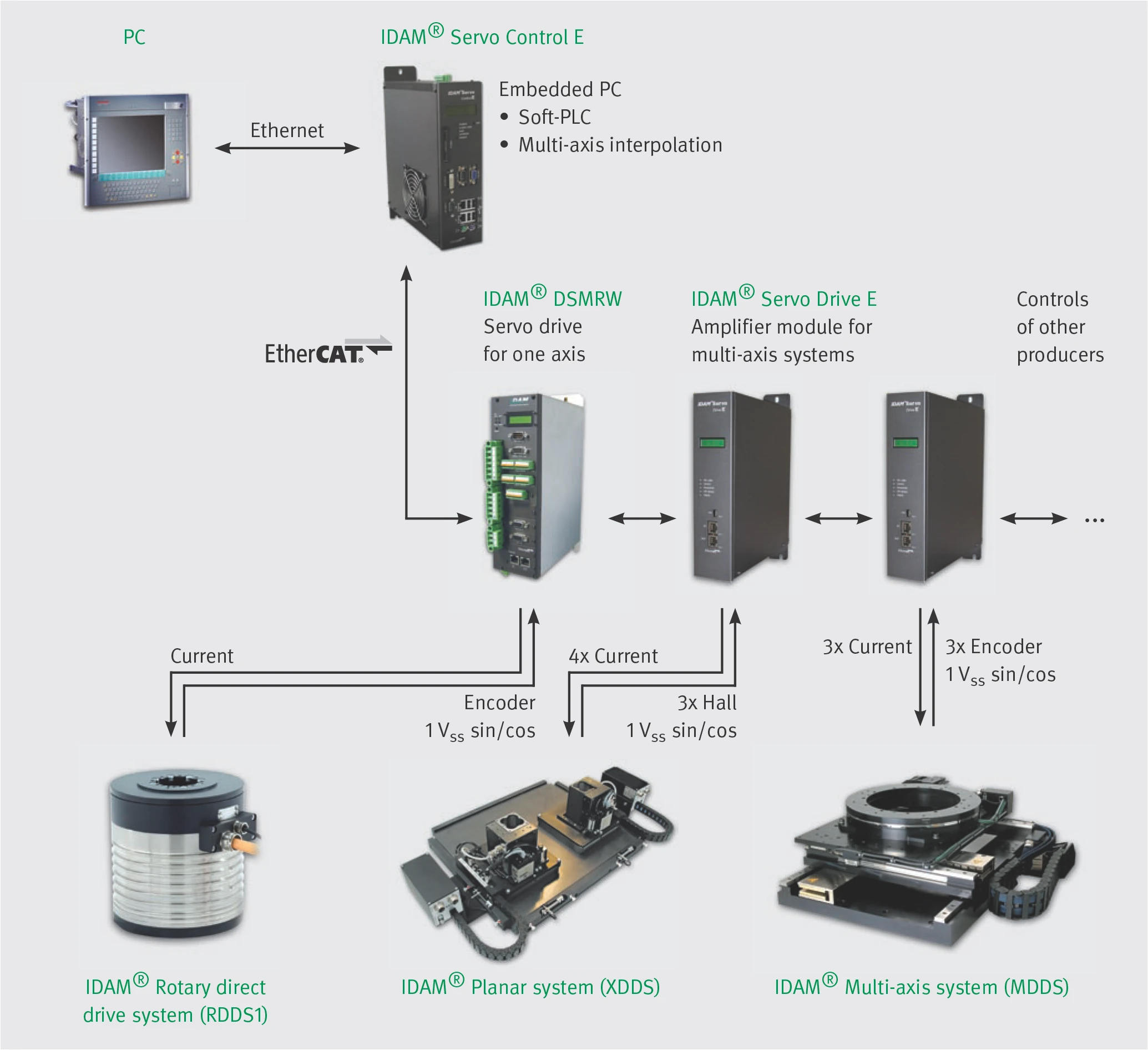
系統配置架構:RDDS1、IDAM DSMRW、Servo Control E、Servo Drive E 及 PC(Ethernet/EtherCAT)互連示意,同時支援 XDDS 平面系統與 MDDS 多軸系統
旋轉直驅系統(RDDS1)可搭配以下控制架構運行:
- IDAM® DSMRW:單軸伺服驅動器,或其他廠牌控制器
- 電流回授(Current)
- 編碼器 1 Vss sin/cos
- IDAM® Servo Control E + IDAM® Servo Drive E(多軸擴充模組)
- 透過 Ethernet 連接 PC(Embedded PC,含 Soft-PLC 與多軸插補)
- 支援 IDAM® RDDS1(旋轉)、IDAM® XDDS(平面)、IDAM® MDDS(多軸)等系統
- 其他廠牌控制器(Controls of other producers)
附加負載(Additional Loads)
以下說明旋轉系統可能的負載情況。外部力或附加質量依施力點及位置對旋轉系統造成特定負載。
軸向力與軸向負載
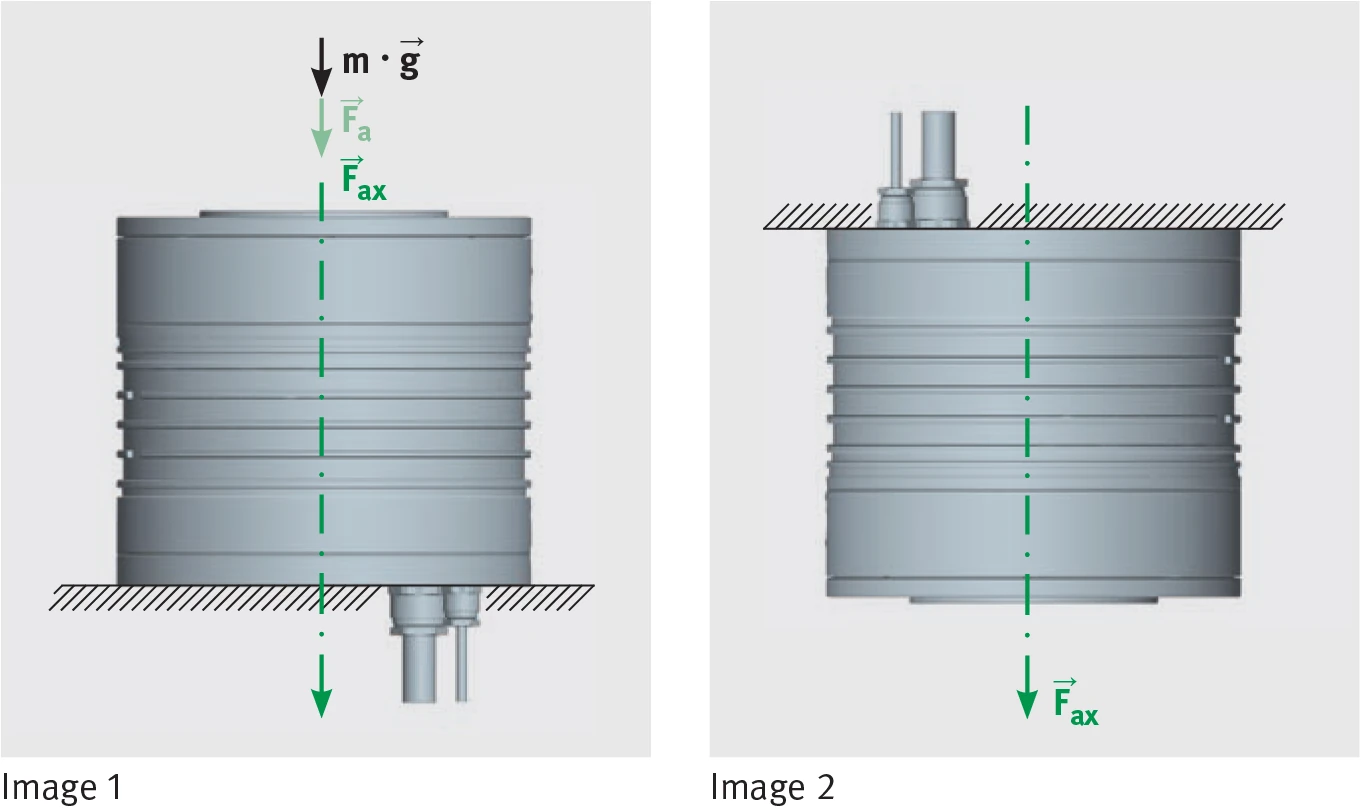
圖 1 與圖 2:同心配置的軸向合力 Fax = Fa + m × g(兩種安裝方向)
作用於中心、作用線與旋轉軸重合的外部力(Fa),以及同心配置的附加質量(m),在圖 1 與圖 2 的組裝方式下,將產生合軸向力(Fax):
Fax = Fa + m × g
傾覆扭矩(軸向偏心)
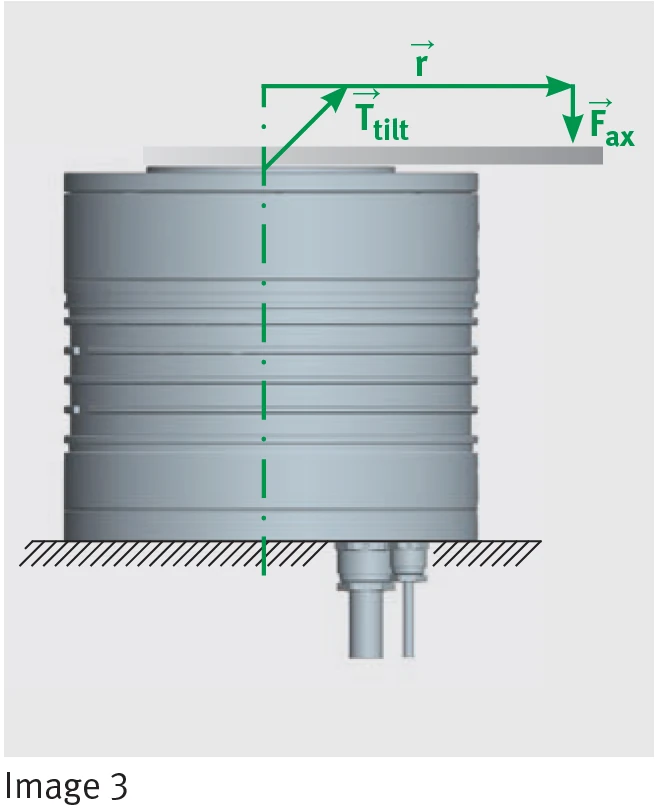
圖 3:偏心距 r 產生傾覆扭矩 Ttilt(正置安裝)
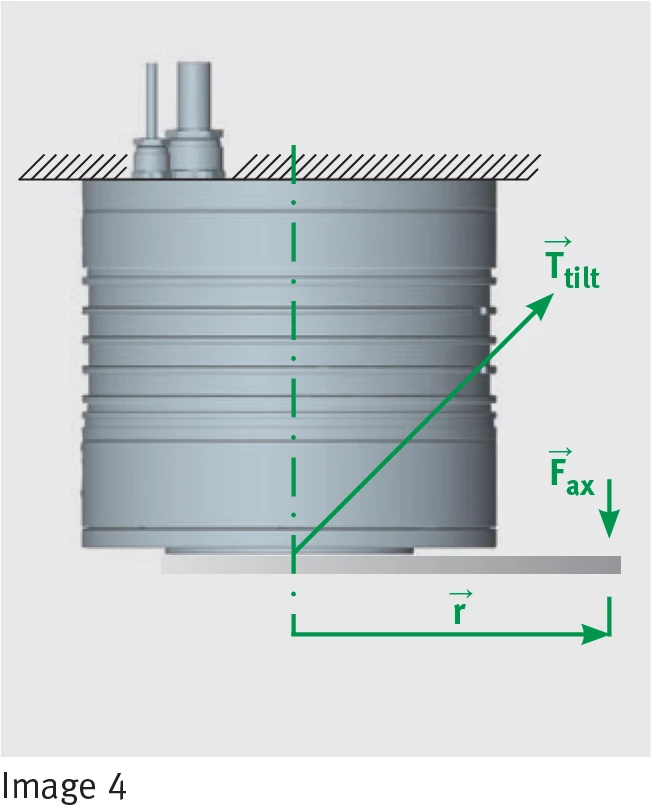
圖 4:偏心距 r 產生傾覆扭矩 Ttilt(倒置安裝)
若合軸向力(Fax)相對旋轉軸有偏心距(r)(如圖 3 與圖 4),旋轉系統將承受附加傾覆扭矩:
Ttilt = r × Fax
在槓桿臂與力互相垂直時:
|Ttilt| = |r| × |Fax| × sin 90°
Ttilt = r × Fax
徑向力與傾覆扭矩
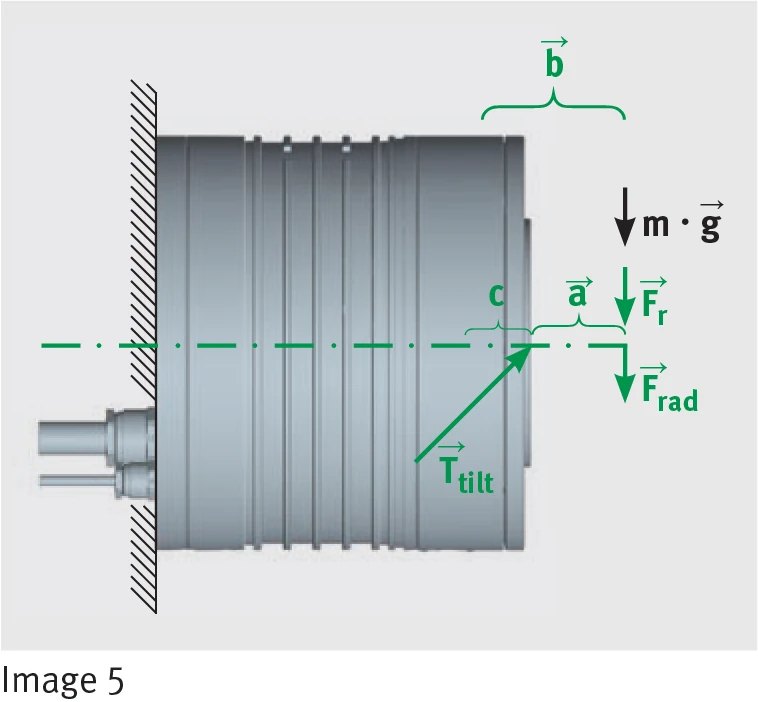
圖 5:徑向力 Fr、合徑向力 Frad、距離 a、b、c 及傾覆扭矩 Ttilt 示意(水平安裝)
作用於中心、垂直於旋轉軸的外部徑向力(Fr),以及同心配置的附加質量(m),在圖 5 的組裝方式下,將產生合徑向應力(Frad):
Frad = Fr + m × g
徑向力(Frad)的施力點通常距載台板距離(a),且徑向負載額外造成傾覆扭矩。依圖 5,傾覆扭矩為:
Ttilt = b × Frad
在槓桿臂與力互相垂直時,類同前頁:
|Ttilt| = |b| × |Frad| × sin 90°
Ttilt = b × Frad
其中距離 b 依圖 5 為:
b = a + c
因此傾覆扭矩為:
Ttilt = (a + c) × Frad
c 值為各直徑規格的特定數值:
| RDDS1 | c [m] |
|---|---|
| 130xH | 0.028 |
| 160xH | 0.032 |
| 180xH | 0.026 |
| 230xH | 0.029 |
注意:在任何情況下,規定的限制值(Fax、Frad、Ttilt)均不得超過。如您的負載需求較高,請與我們聯繫。
直驅選型(Selection of Direct Drives for Rotary Applications)
週期性應用(Cycled Applications)
週期性運作中,順序定位動作之間穿插無動作的暫停。簡單的定位順序由正加速運動接著減速(通常大小相同的負加速)構成,因此加速與減速時間相等,最大角速度 ωmax 在加速階段結束時達到。
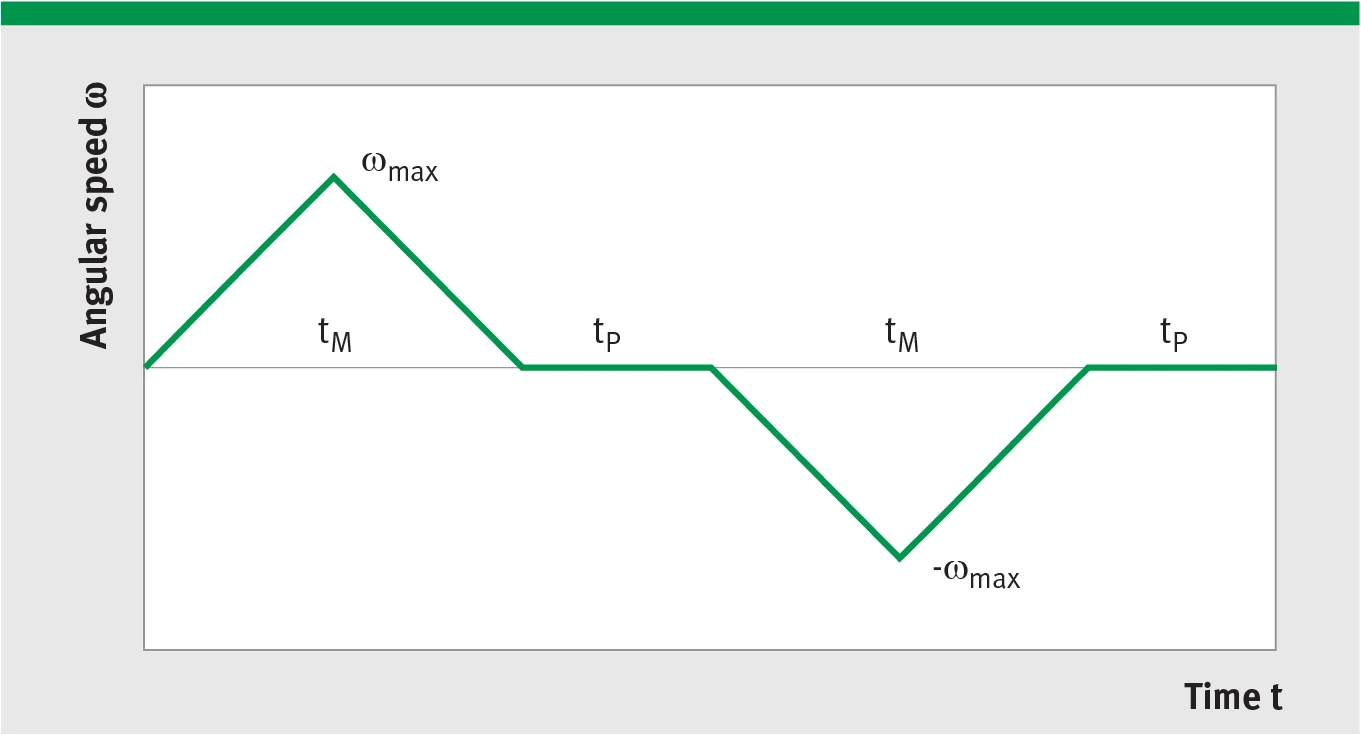
角速度 ω vs. 時間 t:顯示 ωmax、-ωmax、運動時間 tM 與暫停時間 tP 的週期性往返運動
由此得到 α(t) 圖(α:角加速度)以及所需運動扭矩:
T = J × α
(T:扭矩 [Nm],J:質量慣性矩 [kgm2],α:角加速度 [rad/s2])
週期於 ω(t) 圖中描述(ω:角速度,t:時間),顯示含暫停的前後往返運動(tM:運動時間,tP:暫停時間)。
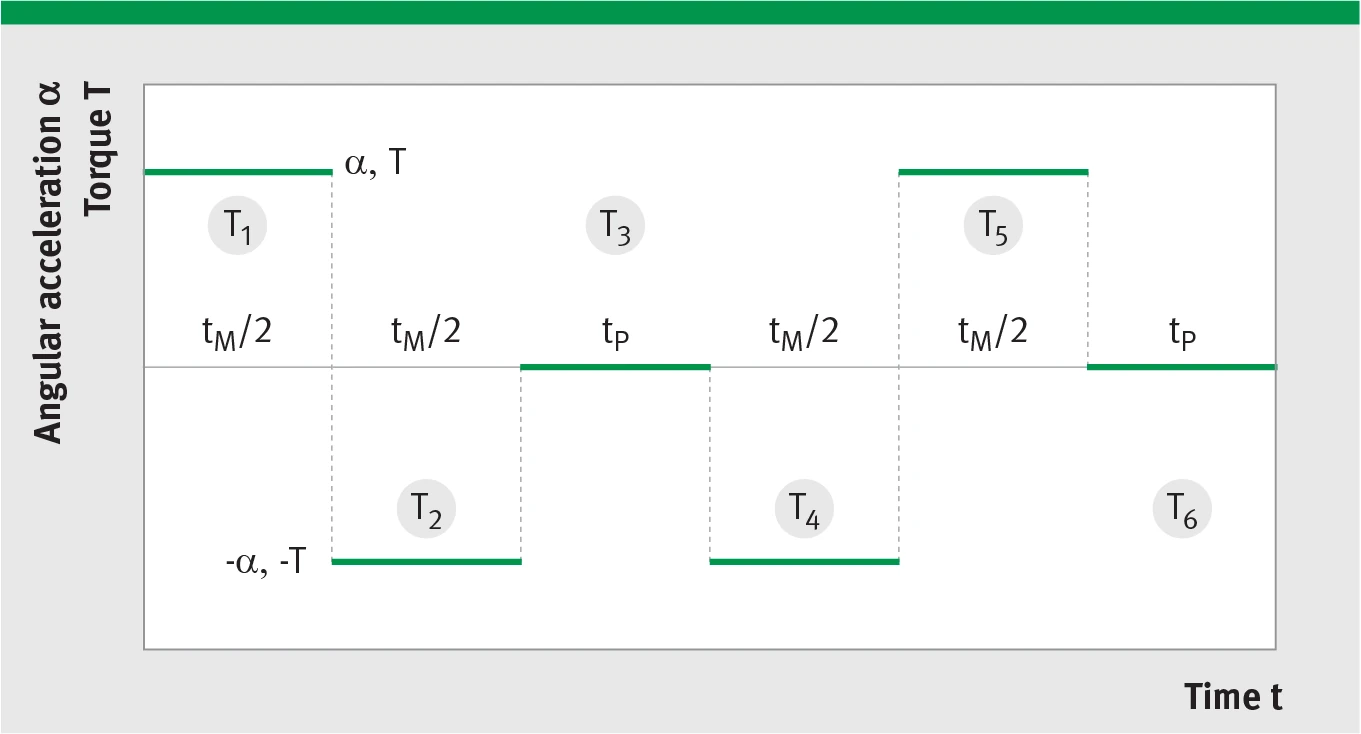
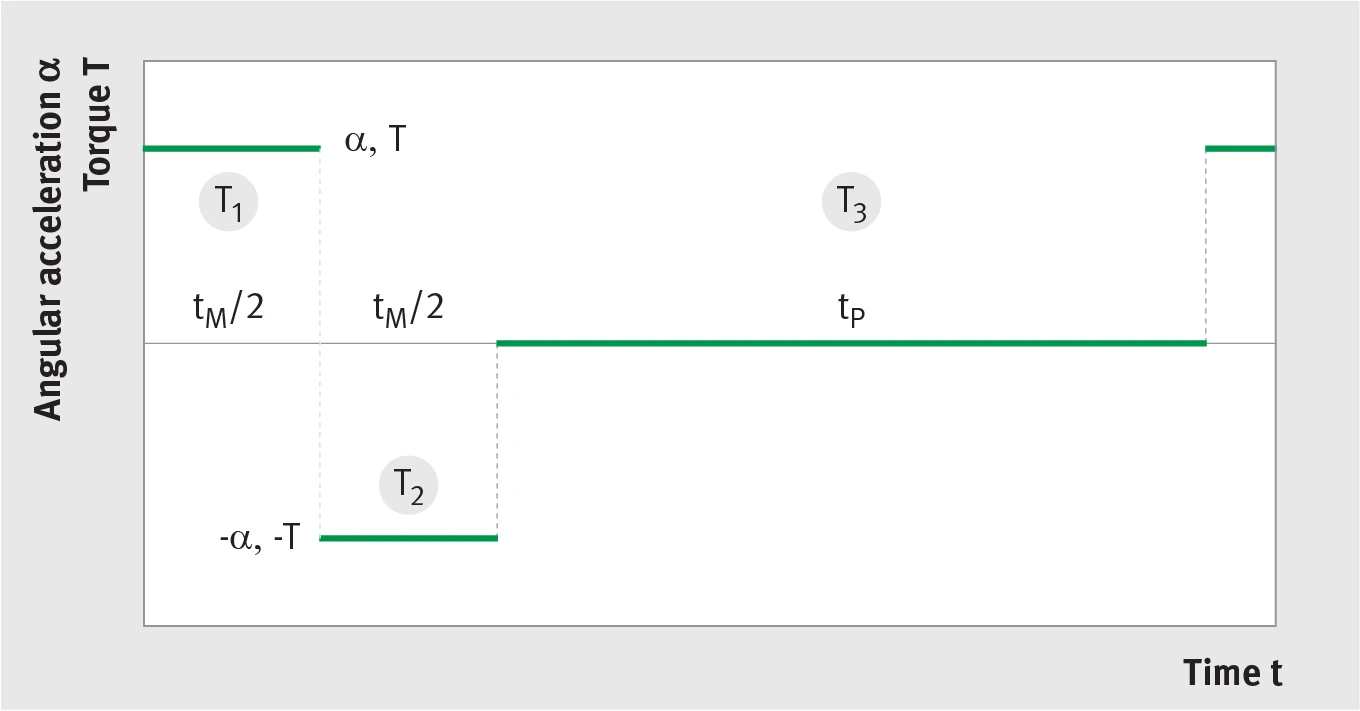
角加速度 α 與扭矩 T vs. 時間 t:T1–T6 六段扭矩週期,顯示 tM/2 與 tP 各時間段
依照所需節拍週期的扭矩變化,馬達依三項準則選型:
- 週期中的最大扭矩 M:依資料表 Tp(峰值扭矩)
- 週期中的有效扭矩 M:依資料表 Tc(無冷卻)或 Tcw(水冷)
- 週期中的最大轉速 M:依資料表 nlp
有效扭矩等於節拍週期中扭矩曲線(六段扭矩週期)的均方根值:
Trms = √T12·t1 + T22·t2 + … + T62·t6t1 + t2 + … + t6
範例計算中的安全係數 1.4 同時考慮馬達在扭矩-電流特性非線性區域的運作,在此情況下計算 Teff 的公式僅為近似值。
令 T1 = T、T2 = -T、T3 = 0、T4 = -T、T5 = T、T6 = 0,以及 t1 = tM/2、t2 = tM/2、t3 = tP、t4 = tM/2、t5 = tM/2、t6 = tP,計算有效扭矩:
Trms = Tnom × √tMtM + tP
此方程式適用於節拍週期中大小相同扭矩的情況(慣性矩與角加速度為常數)。根號內出現「運動時間總和除以運動時間與暫停時間之總和」,分母即為週期時間。
定位運動的角加速度、最大角速度與最大轉速計算式:
α = 4 × φ / tM2
ωmax = α × tM / 2
nmax = 60 / (2 × π) × ωmax
| 符號 | 說明 | 單位 |
|---|---|---|
| φ | 定位角(Motion angle) | rad |
| tM | 運動時間(Motion time) | s |
| α | 角加速度(Angular acceleration) | rad/s2 |
| ωmax | 最大角速度(Maximum angular speed) | rad/s |
| nmax | 最大轉速(Maximum rotary speed) | rpm |
若伺服變頻器中設定了加加速度限制(jerk limit),定位時間將相應延長,此時須以更高加速度維持固定的定位時間。
旋轉直驅系統選型範例(Selection of Rotary Direct Drive Systems)
範例:週期性應用,例如測試系統
| 預設值(Preset values) | 數值 | 說明 |
|---|---|---|
| 質量慣性矩 J [kgm2] | 0.018 | |
| 定位角 φ [°] | 22.5 | |
| 摩擦扭矩 Tf [Nm] | 2 | |
| 安裝空間 D(最大外徑)[mm] | 180 | |
| 運動時間 tM [ms] | 30 | |
| 安全係數(Safety factor) | 1.4 | |
| 暫停時間 tP [ms] | 60 |
定位角換算為弧度:
φ = 180/π × 22.5° = 0.3927 rad
各步驟計算結果:
α = 4 × 0.3927 rad / (0.03 s)2 = 1745.33 rad/s2
ωmax = 1745.33 rad/s2 × 0.03 s / 2 = 26.18 rad/s
nmax = 60 / (2 × π) × 26.18 rad/s = 250 rpm
加入摩擦扭矩與安全係數後,得到最大安全係數扭矩:
Tnom = [(0.018 kgm2 × 1745.33 rad/s2) + 2 Nm] × 1.4 = 46.78 Nm
加速與制動扭矩相等,有效扭矩等於節拍週期扭矩曲線的均方根值:
Trms = 46.78 Nm × √0.03 s0.03 s + 0.06 s = 27.01 Nm
(六段扭矩週期 = 兩個週期)
系統選型結果
兩款選定系統均可達到最大轉速 250 rpm。
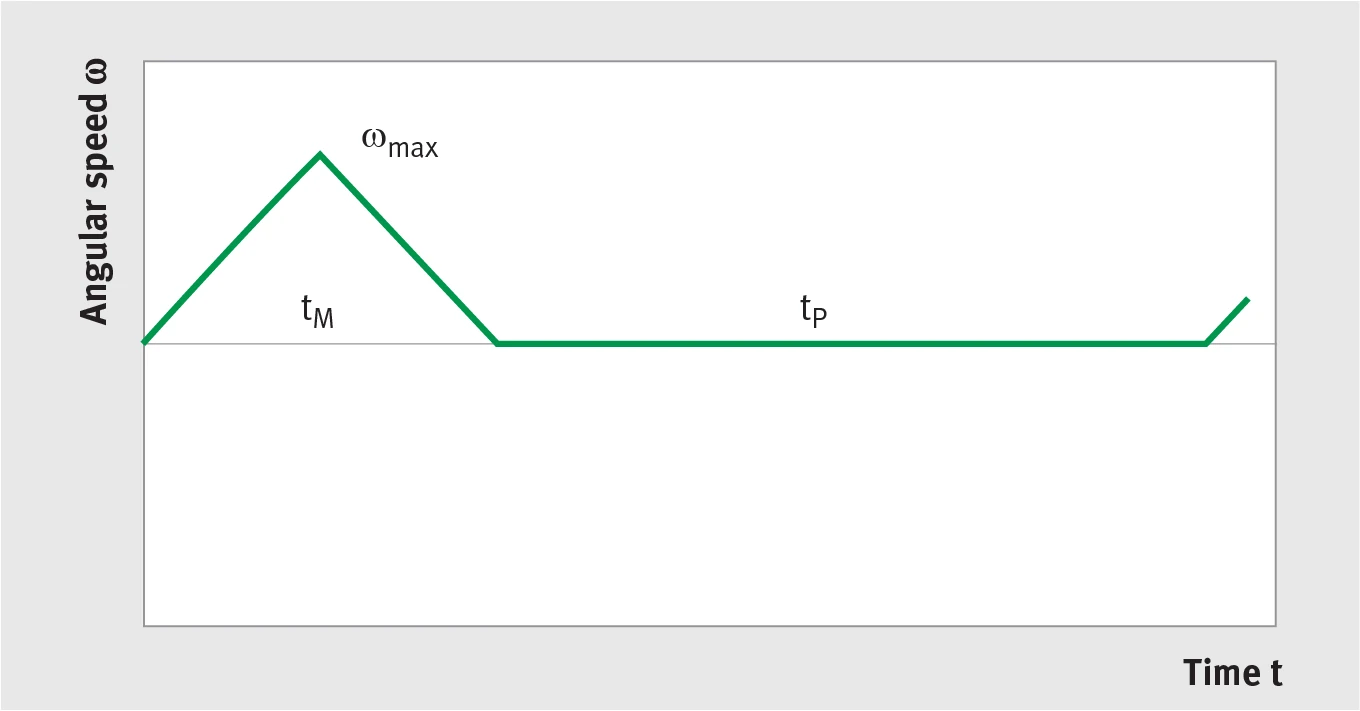
選型範例:角速度 ω vs. 時間 t(ωmax、tM、tP)
選型範例:角加速度 α 與扭矩 T vs. 時間 t(T1–T3 簡化週期)
查詢與選型
如需就您的應用進行查詢與選型,歡迎隨時與我們聯繫。