1.1 公式符號圖例(Legend of symbols used in formulas)
說明
下表列出本章公式與圖表中使用的所有符號、單位與說明,共 58 筆。
| 符號 | 單位 | 說明 |
|---|---|---|
| I | A | 馬達電流(Motor current) |
| Ic eff | A | 有效連續電流,無冷卻(Effective continuous current, not cooled) |
| Ic red | A | 降額連續電流(Reduced continuous current) |
| Icw eff | A | 有效連續電流,冷卻(Effective continuous current, cooled) |
| Icw2 eff | A | 高轉速連續運轉之有效連續電流(Effective continuous current for higher speeds in continuous operation) |
| Ip eff | A | 有效峰值電流(Effective peak current) |
| Ipl eff | A | 有效峰值電流,線性區(Effective peak current, linear range) |
| Iu eff | A | 有效極限電流(Effective ultimate current) |
| J | kg·m² | 慣性矩(Mass moment of inertia) |
| km | Nm/√W | 扭矩馬達的馬達常數(Motor constant for torque motors) |
| kT | Nm/A | 扭矩常數(Torque constant) |
| n | min⁻¹ | 轉速(Speed) |
| nlc | min⁻¹ | Ic eff 與 UDCL 下的極限轉速(Limiting speed at Ic eff and UDCL) |
| nlp | min⁻¹ | Ip eff 與 UDCL 下的極限轉速(Limiting speed at Ip eff and UDCL) |
| nlw | min⁻¹ | 拐點轉速(Knee speed) |
| nlw2 | min⁻¹ | Icw2 eff 與 UDCL 下的運轉轉速 FS(Operating speed FS at Icw2 eff and UDCL) |
| nlw3 | min⁻¹ | 連續運轉中 Icw2 eff 與 UDCL 下的極限轉速(Limiting speed at Icw2 eff and UDCL in continuous operation) |
| nlwS1 | min⁻¹ | 額定轉速 S1,冷卻(Rated speed S1, cooled) |
| nmax | min⁻¹ | 最大轉速(Max. speed) |
| Pl | W | 功率損耗(Power loss) |
| Pmax S1 | N | 最大額定功率(Maximum rated power) |
| R | Ω | 歐姆電阻(Ohmic resistance) |
| t | s | 時間(Time) |
| T | Nm | 扭矩(Torque) |
| tb | s | 暫停時間(Pause time) |
| Tc | Nm | 連續扭矩,無冷卻(Continuous torque, not cooled) |
| Tcw | Nm | 連續扭矩,冷卻(Continuous torque, cooled) |
| Tcw2 | Nm | Icw2 eff 與 nlw2 下的扭矩(Torque at Icw2 eff and nlw2) |
| Tcw3 | Nm | Icw2 eff 與 nlw3 下的扭矩(Torque at Icw2 eff and nlw3) |
| Teff | Nm | 有效扭矩(Effective torque) |
| TF | Nm | 軸承摩擦扭矩(Bearing frictional torque) |
| tm | s | 運動時間(Movement time) |
| Tmax | Nm | 最大扭矩(Max. torque) |
| Tp | Nm | 峰值扭矩(Peak torque) |
| Tpl | Nm | 峰值扭矩,線性區(Peak torque, linear range) |
| Tsafe eff | Nm | 含安全係數之有效扭矩(Effective torque, incl. safety factor) |
| Tsafe max | Nm | 含安全係數之最大扭矩(Max. torque, incl. safety factor) |
| Tsw | Nm | 零速扭矩,冷卻(Stall torque, cooled) |
| Tu | Nm | 極限扭矩(Ultimate torque) |
| TW | Nm | 加工扭矩(Processing torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
| UDCL | V | 直流匯流排電壓(DC link voltage) |
| α | rad/s² | 角加速度(Angular acceleration) |
| αmax | rad/s² | 最大角加速度(Max. angular acceleration) |
| αS1 | rad/s² | S1 運轉之角加速度(Angular acceleration in S1 operation) |
| ϑ | °C | 溫度(Temperature) |
| ϑf | °C | 當前進水溫度(Current feed temperature) |
| ϑmax | °C | 最大允許繞組溫度(Max. permissible winding temperature) |
| ϑn | °C | 標稱響應溫度(Nominal response temperature) |
| ϑnf | °C | 標稱進水溫度(Nominal feed temperature) |
| φ | ° | 運動角度(Movement angle) |
| ω | rad/s | 角速度(Angular velocity) |
| ωmax | rad/s | 最大角速度(Max. angular velocity) |
1.2 扭矩馬達的優勢(Advantages of torque motors)
1.2.1 性能(Performance capability)
運動曲線無需轉換
傳動鏈中沒有因傳動或聯軸器元件造成的彈性、間隙、摩擦或遲滯。
多極馬達
多極設計可產生極高的扭矩。這些扭矩可從轉速 > 0 起一直運用到額定轉速。
薄型環狀轉子
薄型、環狀的設計搭配大型自由內徑,可降低馬達慣性並達成高加速率。
直接位置量測
藉由直接位置量測與剛性的機械結構,可實現高精度、高動態的定位作業。
控制器相容性
Schaeffler Industrial Drives 的扭矩馬達可搭配市場上所有常見的伺服驅動器運轉。
1.2.2 營運成本(Operating costs)
無額外運動零件
由於沒有額外的運動零件,傳動單元的組裝、調整與預防性維護更為容易。
傳動鏈磨耗極低
即使在極高的交變負載下,傳動鏈仍極為耐用。低磨耗可減少機台停機時間。
高可用度
除了壽命提升與磨耗降低之外,扭矩馬達穩固的設計亦提升了整台機器的可用度。
能源效率
熱量降至最低,以節省伺服驅動器與冷卻器的能源消耗。
1.2.3 設計(Design)
空心軸
大直徑的空心軸可整合或讓其他組件通過,例如軸、旋轉分配器與介質管路。軸承位置、力的產生與有效作用區域皆可彼此緊鄰配置。
定子(定子)的安裝
由於空間需求小,定子環可輕易整合到機器結構中。
低斷面高度
大型、自由的內徑使得高扭矩、高度緊湊且軸向短的結構成為可能。
零件數少
高度工程化的設計使馬達組件更易於整合到機器組裝中。零件數量少且設計穩固,可降低故障率並提升平均故障間隔時間。
1.3 扭矩馬達的特性(Characteristics of torque motors)
扭矩馬達由定子(primary part)與轉子(secondary part)組成。定子包含主動線圈系統;轉子包含永磁系統。在同心配置中,轉子可為內環(內轉子馬達),亦可為外環(外轉子馬達)。通電的定子會因電磁力而產生作用於轉子的力。
軸承維持定子與轉子之間的氣隙。此外,亦需要量測系統來偵測轉子位置。由於應用需求範圍廣泛,馬達系列已發展出多樣化的定子與轉子組合。
就結構設計而言,扭矩馬達基本上可分為含或不含疊片鐵芯的馬達,或無鐵芯馬達。進一步的區分包括轉子的位置與配置(內轉子或外轉子),或依磁體系統而分。例如磁體可如 RIB 系列那樣黏貼於鋼環表面;或者整合於疊片鐵芯中——亦稱為埋入式磁體(buried magnets)——如 RKIB 系列。這些馬達在寬廣的轉速範圍內可產生持續的高扭矩。扭矩由定子與轉子之間的主動氣隙面積以及結構決定。設計者必須依功率需求選擇馬達組件。傳統電動馬達依功率分類;相對地,扭矩馬達依所需扭矩分類。
表 1:扭矩馬達特性
| 馬達系列 | 特性 |
|---|---|
| RIB |
高扭矩密度的內轉式馬達(Internal running motor with high torque density)
|
| RKI 與 RKIB |
高功率密度的內轉式馬達(Internal running motor with high power density)
|
1.4 一般馬達特性值(General motor characteristic values)
1.4.1 效率準則(Efficiency criteria)
扭矩馬達的功率損耗依繞組與尺寸列於性能資料中。雖然扭矩馬達在靜止時可產生高扭矩,但並不輸出任何機械功率,因此沒有理由標示效率。
不過,馬達常數 km 可用於效率比較。馬達常數 km 定義扭矩與產生此扭矩時所產生的銅損之間的關係。功率損耗會使馬達升溫。此外,馬達常數 km 在靜止狀態、低轉速以及室溫下的線性控制範圍內是準確的。
當馬達受溫度上升影響時,由於繞組電阻增加,其效率會下降。對於極變頻率 100 Hz 或更高的轉速,銅損會加上以頻率相依的遲滯損與渦流損形式出現的鐵損。雖然鐵損未納入馬達常數 km 中,但在極限轉速範圍內仍具相關性,因此應加以注意。馬達常數 km 僅與扭矩–電流特性曲線的線性區有關。
公式 1:功率損耗(Power loss)
Pl = ( T / km )2
| 符號 | 單位 | 說明 |
|---|---|---|
| Pl | W | 功率損耗(Power loss) |
| T | Nm | 扭矩(Torque) |
| km | Nm/√W | 馬達常數(Motor constant) |
馬達常數 km 取決於歐姆電阻,因此也取決於馬達繞組溫度。性能資料中標示的馬達常數 km 是 +20 °C 時的值。特性曲線顯示馬達常數隨溫度變化的函數。
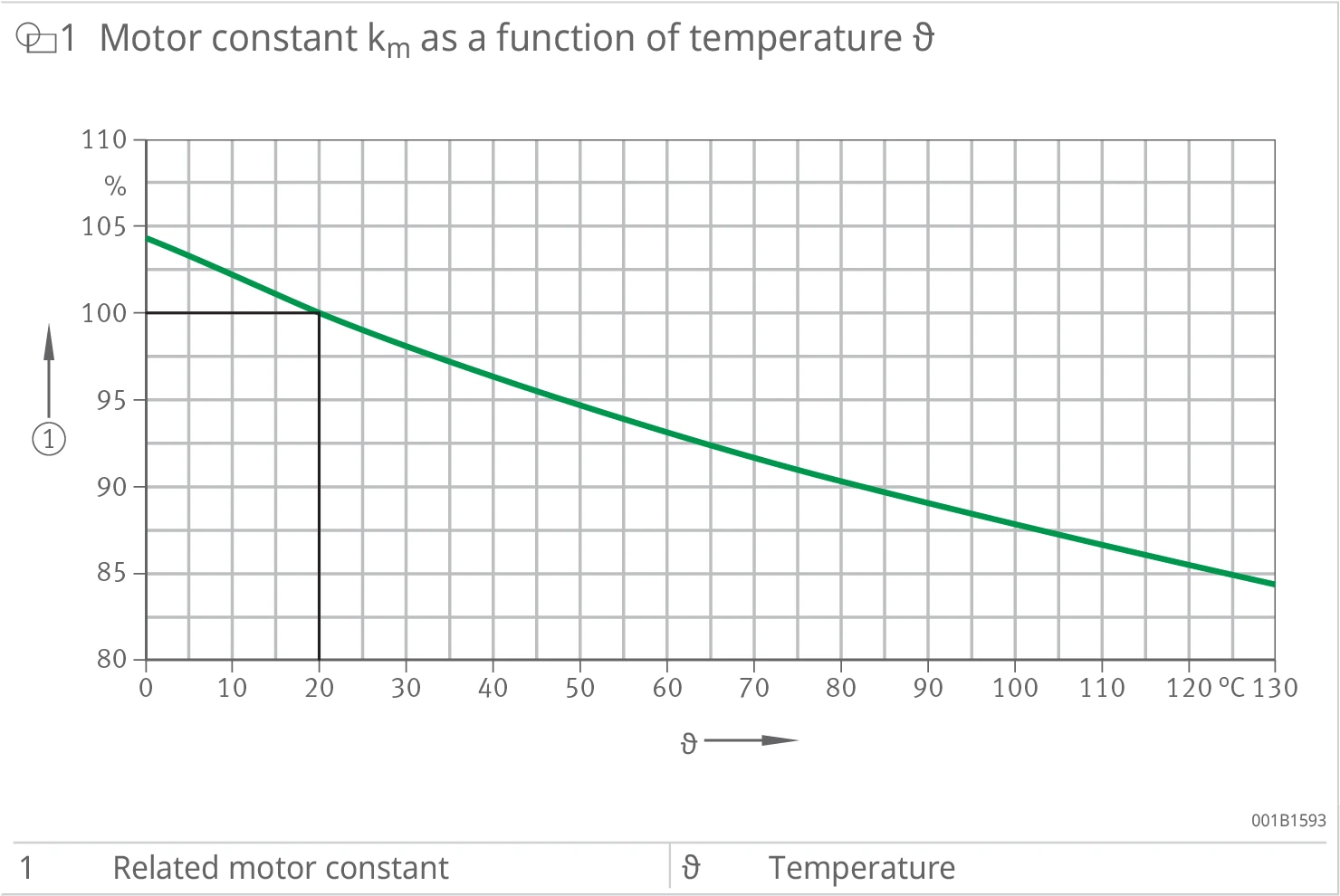
圖 1:馬達常數 km 隨溫度 ϑ 變化的函數。縱軸為相對馬達常數(%),橫軸為溫度 ϑ(°C)。曲線於 +20 °C 為 100%,隨溫度上升而下降,+130 °C 時約降至 84%。①=相對馬達常數,ϑ=溫度。
熱行為(Thermal behaviour)
溫度上升會使繞組電阻增加,從而降低馬達常數 km。在 +130 °C 時,馬達常數 km 降至其正常值的 0.84 倍。在產生扭矩的固定電流下,受熱馬達的功率損耗會比冷馬達更高,此功率損耗進一步使馬達溫度上升。
1.4.2 繞組設計與相依性(Winding designs and dependencies)
首要而言,系列決定扭矩馬達的極限轉速。可能的設計如下:
- RIB 扭矩馬達:定子為疊片鐵芯。轉子的磁體黏貼於鋼環上。
- RKI 扭矩馬達與 RKIB 扭矩馬達:定子為疊片鐵芯。轉子的磁體整合於疊片鐵芯中。
在同一系列內,尺寸、直流匯流排電壓與繞組設計皆會影響極限轉速。
馬達內部的電壓降會隨轉速增加而提高電壓需求。在性能資料所指定的拐點轉速下,電壓需求等於採用磁場導向控制(field-oriented control)的伺服轉換器的直流匯流排電壓,超過此轉速後轉速便會快速下降。直流匯流排電壓愈高、且與繞組相關的電壓常數 kû 愈小,可達成的極限轉速便愈高。由於電壓常數與扭矩常數之間存在相關性,在相同扭矩下,較高的轉速需求會提高馬達的功率需求。在固定直流匯流排電壓 UDCL 下,會為不同的極限轉速與動態需求預先定義一種或多種標準繞組。
1.4.2.1 直流匯流排電壓的變化(Change in DC link voltage)
直流匯流排電壓會影響繞組特定的轉速限制。若直流匯流排電壓變化在最大 ±10 % 之內,則可在馬達預選階段假設直流匯流排電壓與轉速限制之間成正比。客戶特定直流匯流排電壓的精確轉速限制,可透過 Schaeffler Industrial Drives 的應用工程師及業務部門取得。
在較低的直流匯流排電壓下,極限轉速會降低。扭矩–電流特性曲線顯示不同運轉點下的扭矩。扭矩–轉速特性曲線顯示各運轉點下扭矩與轉速之間的關係。
扭矩–轉速曲線可透過 Schaeffler Industrial Drives 的應用工程師及業務部門以資料表形式取得。聯絡方式:sales-sid@schaeffler.com
1.4.3 扭矩/轉速特性曲線(Torque/speed characteristic curve)
RIB 扭矩馬達
RIB 扭矩馬達的扭矩–轉速特性曲線顯示在固定直流匯流排電壓、無磁場弱化的條件下,繞組特定轉速限制隨扭矩變化的函數。此特性曲線並不描述工作週期與相關的熱行為。特性曲線僅代表馬達在繞組溫度 +20 °C 下可達到的範圍。
扭矩超過 Tcw 的運轉點受時間限制,以保護定子免於過熱。在 Tu 時,過高的轉子輸出溫度可能導致退磁。
在 n > nlwS1 時,由於額外的時間限制,馬達僅能運轉特定時間。或者,可降低電流以進行連續運轉。額定轉速(S1,冷卻)nlwS1 也可依馬達尺寸與繞組設計等於 nlw。
Ic eff 與 Tc 下的極限轉速 nlc 對於理解特性曲線很重要,但由於其相關性較小,並未列於性能資料中。
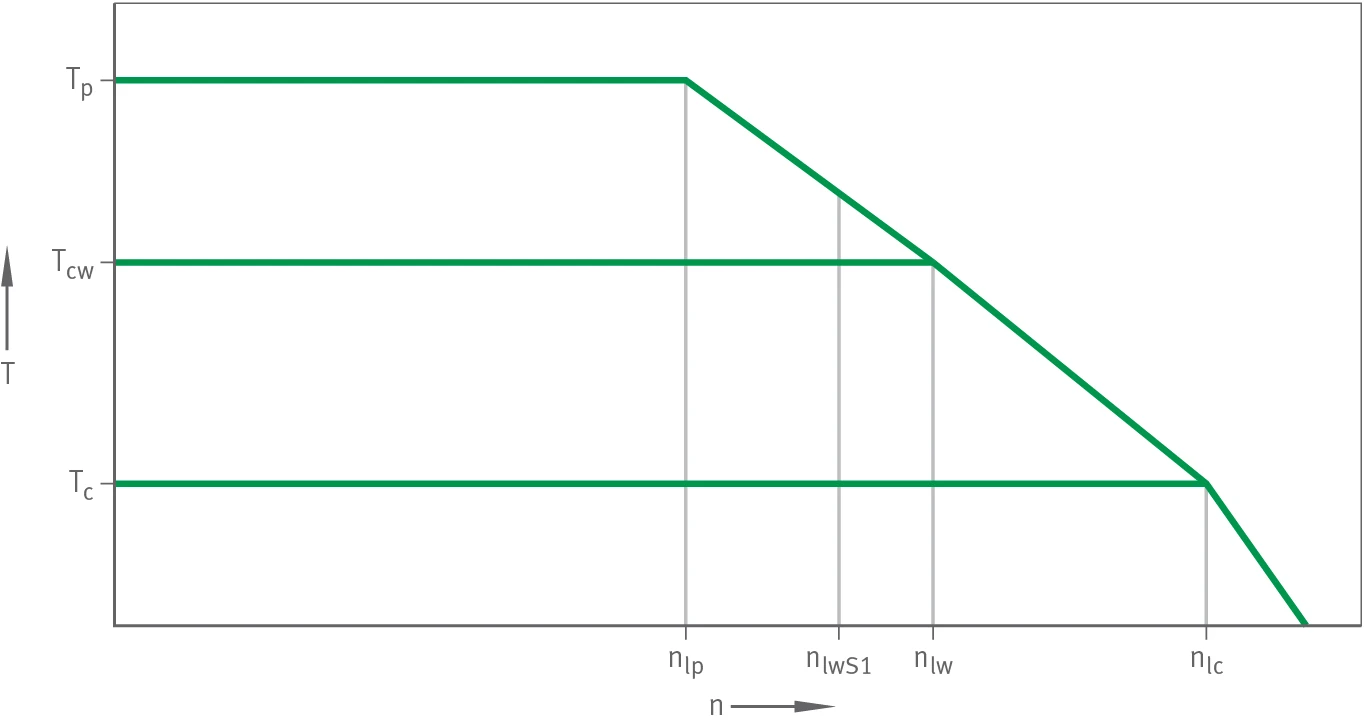
圖 2:RIB 扭矩馬達扭矩–轉速特性曲線。縱軸為扭矩 T,橫軸為轉速 n。曲線顯示 Tp、Tcw、Tc 三個扭矩水平與對應的轉速限制 nlp、nlwS1、nlw、nlc。符號定義:T=扭矩、n=轉速、Tc=連續扭矩(無冷卻)、Tcw=連續扭矩(冷卻)、Tp=峰值扭矩、nlc=Ic eff 與 UDCL 下的極限轉速、nlp=Ip eff 與 UDCL 下的極限轉速、nlw=拐點轉速、nlwS1=額定轉速 S1(冷卻)。
RKI 扭矩馬達與 RKIB 扭矩馬達
連續轉速的扭矩–轉速特性曲線顯示在高轉速、固定直流匯流排電壓並含磁場弱化(field weakening)的條件下,繞組特定轉速限制隨扭矩變化的函數。RKI 扭矩馬達與 RKIB 扭矩馬達可在特性曲線所示的運轉點連續運轉。
在連續扭矩 Tcw 下可運轉至轉速 nlwS1。在更高的轉速直到 nlw2 之間,連續運轉需要將電流從 Icw eff 降至 Icw2 eff,對應的扭矩為 Tcw2。
在 nlw2 與 nlw3 之間,最大允許連續電流亦為 Icw2 eff。對應的扭矩變化取決於繞組與轉子配置。在 nlw3 與 Icw2 eff 時,對應的扭矩為 Tcw3。此運轉點的機械功率為 Pmax S1。nlw2 與 nlw3 之間的精確變化只能在產品特定資料表中查得,須向 Schaeffler Industrial Drives 索取。
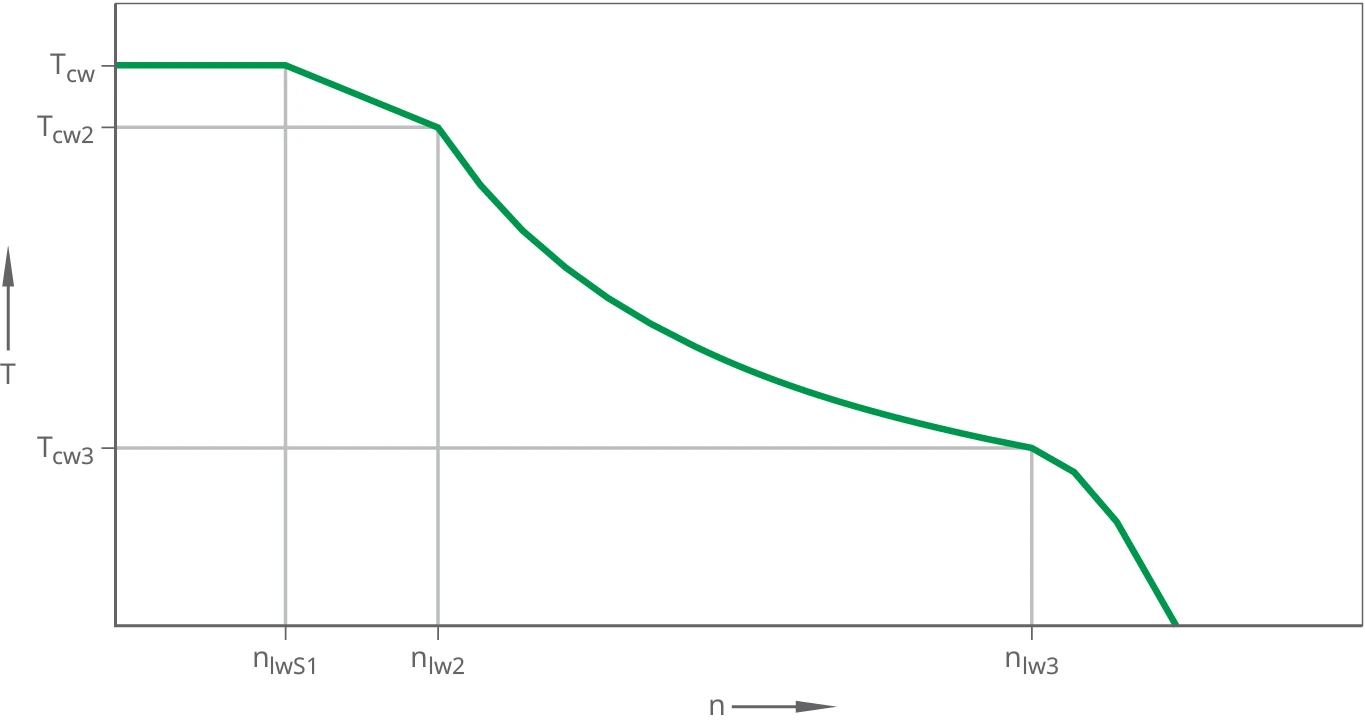
圖 3:RKIB 扭矩馬達連續轉速的扭矩–轉速特性曲線。縱軸為扭矩 T,橫軸為轉速 n。曲線顯示 Tcw、Tcw2、Tcw3 與對應轉速限制 nlwS1、nlw2、nlw3。符號定義:n=轉速、T=扭矩、Tcw=連續扭矩(冷卻)、Tcw2=Icw2 eff 與 nlw2 下的扭矩、Tcw3=Icw2 eff 與 nlw3 下的扭矩、nlwS1=額定轉速 S1(冷卻)、nlw2=Icw2 eff 與 UDCL 下的運轉轉速 FS、nlw3=連續運轉中 Icw2 eff 與 UDCL 下的極限轉速。
控制儲備(Control reserve):所有指定轉速皆與固定的直流匯流排電壓 UDCL 相關。若使用未穩定化直流匯流排的變頻器,UDCL 並非定值。因此運轉點必須依直流匯流排電壓波動預留控制儲備。通常在使用未穩定化直流匯流排的變頻器時,運轉點轉速不應超過該運轉點馬達可能轉速的約 80 %。
1.4.4 扭矩/電流特性曲線(Torque/current characteristic curve)
在 0 A 與線性峰值電流 Ipl eff 之間範圍內的馬達電流會產生線性相依的扭矩。峰值電流 Ipl eff 產生線性峰值扭矩 Tpl。馬達常數 km 適用於計算 0 A 與 Ipl eff 之間範圍的功率損耗。扭矩常數 kT 用於在此範圍內依電流計算扭矩,或反之。
線性峰值電流 Ipl eff 的值與溫度無關。其值取決於系列與繞組設計,可能低於或高於冷卻連續電流 Icw eff 的值。線性峰值電流 Ipl eff 與相關的線性峰值扭矩 Tpl 對於理解特性曲線很重要。不過,由於這些值的實際相關性甚低,並未列於性能資料中。
在 I > Ip eff 時,扭矩–電流特性曲線不再為線性。馬達磁路的飽和造成此非線性。在 Ip eff 的扭矩–電流點 Tp 與 Iu eff 的 Tu 之間,特性曲線變為非線性。在此範圍內,曲線的斜率為可變,且明顯低於扭矩常數 kT 的值。
馬達可在運轉點 Tp、Ip eff 運轉數秒。這是加速程序的最大運轉點。由於永磁體有退磁的風險,馬達不得超過極限點 Tu、Iu eff 運轉。
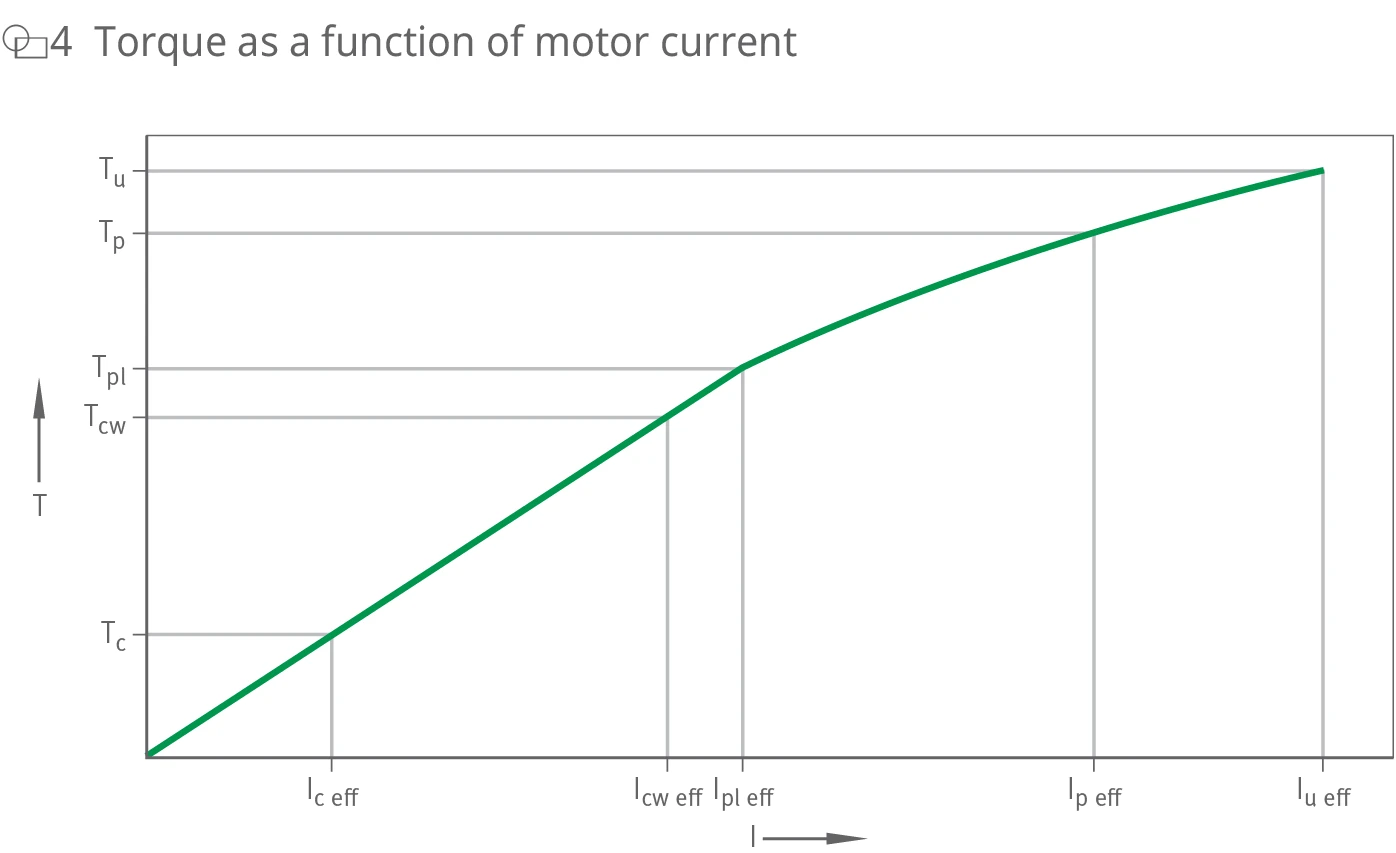
圖 4:扭矩隨馬達電流變化的函數。縱軸為扭矩 T,橫軸為馬達電流 I。曲線在 0 至 Ip eff 之間為線性,超過後因磁飽和而呈非線性,至 Tu、Iu eff 為止。標示扭矩水平 Tc、Tcw、Tpl、Tp、Tu 與電流點 Ic eff、Icw eff、Ipl eff、Ip eff、Iu eff。
1.5 熱保護(Thermal motor protection)
1.5.1 監控迴路 I 與 II(Monitoring circuits I and II)
使用者經常在熱性能極限下運轉直驅馬達。此外,運轉中可能發生無法預期的過載。過載會造成高於允許連續電流的電流負載。在過載事件中,有效馬達電流(即均方根值 I²t)不得超過允許的連續馬達電流。對於短時過電流,電力電子裝置必須具備 I²t 馬達保護模型來控制馬達電流。此間接溫度監控非常快速且可靠。在馬達試車期間,使用者必須確保 I²t 監控已開啟。
Schaeffler Industrial Drives 的馬達必須透過馬達溫度監控加以保護。標準版本的監控迴路 I 含 3 個串聯於三相繞組上的 PTC 感測器。監控迴路 II 另含一個位於馬達一相上的 Pt1000 感測器。此感測器可提供預警門檻。
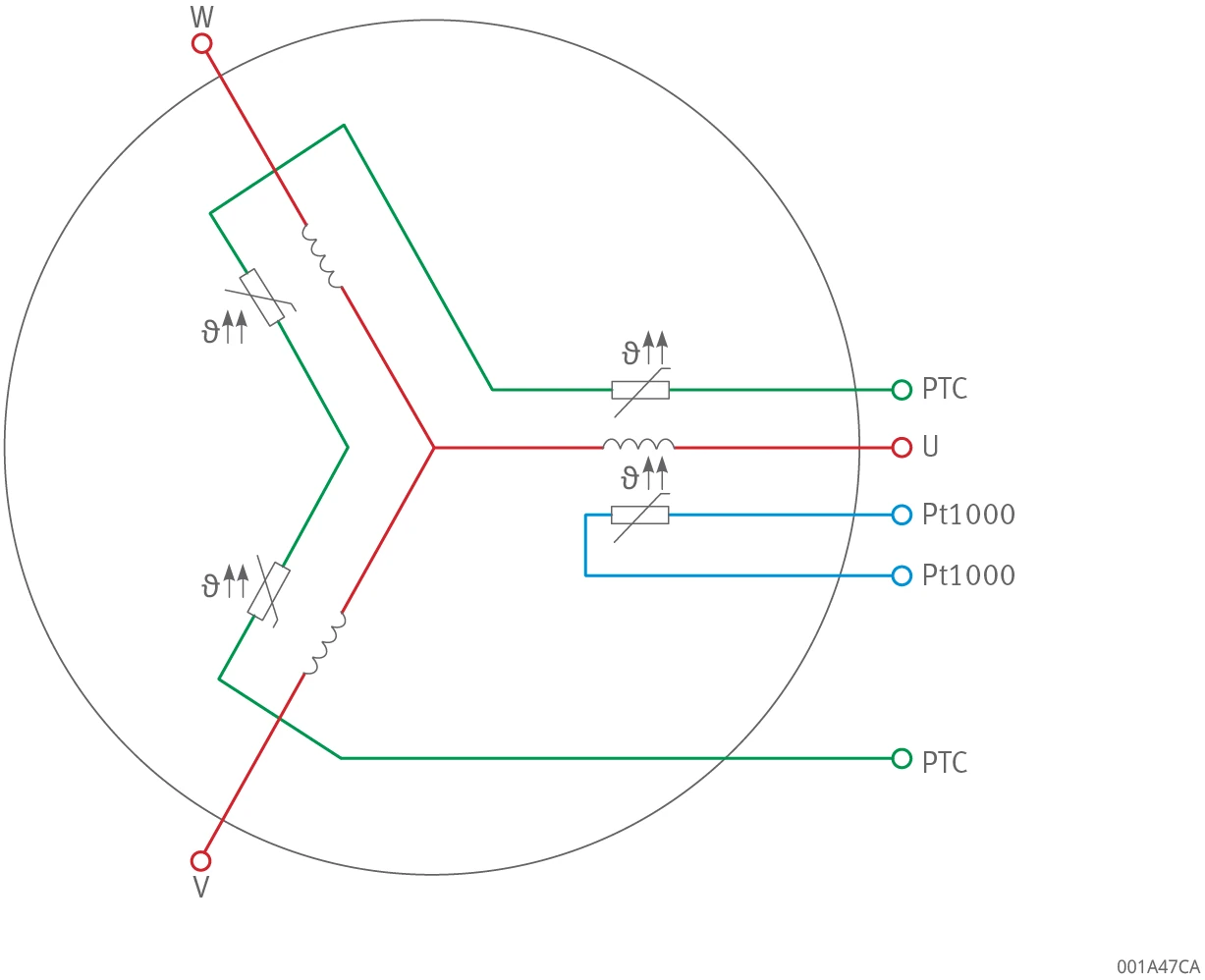
圖 5:三重 PTC 與 Pt1000 的標準接線。顯示馬達三相 U、V、W 繞組上串聯的 3 個 PTC 感測器,及一相上的 Pt1000 感測器的接線端子配置。
PTC 與 Pt1000 感測器與馬達之間為基本絕緣(basic isolation)。感測器不適合依 DIN EN 61800-5-1 直接連接至 PELV 迴路或 SELV 迴路。
1.5.2 監控迴路 I(Monitoring circuit I)
PTC 為熱敏電阻。PTC 的熱時間常數為數秒。與 Pt1000 不同,當超過標稱響應溫度 ϑn 時,PTC 的電阻會非常急遽地上升。超過標稱響應溫度時,電阻會增加至冷值的數倍。
使用三重 PTC(即三個串聯的 PTC 感測器)時,總電阻會顯著變化。即使只有一個感測器超過響應溫度 ϑn,此顯著變化亦會發生。使用三個 PTC 感測器可確保在不對稱相負載下(例如靜止時)馬達仍可透過熱敏電阻馬達保護繼電器安全關機。熱敏電阻馬達保護繼電器通常在 1.5 kΩ 與 3.5 kΩ 之間跳脫,從而觸發控制器停止。
PTC 感測器可偵測各繞組的過溫,偏差僅數度。
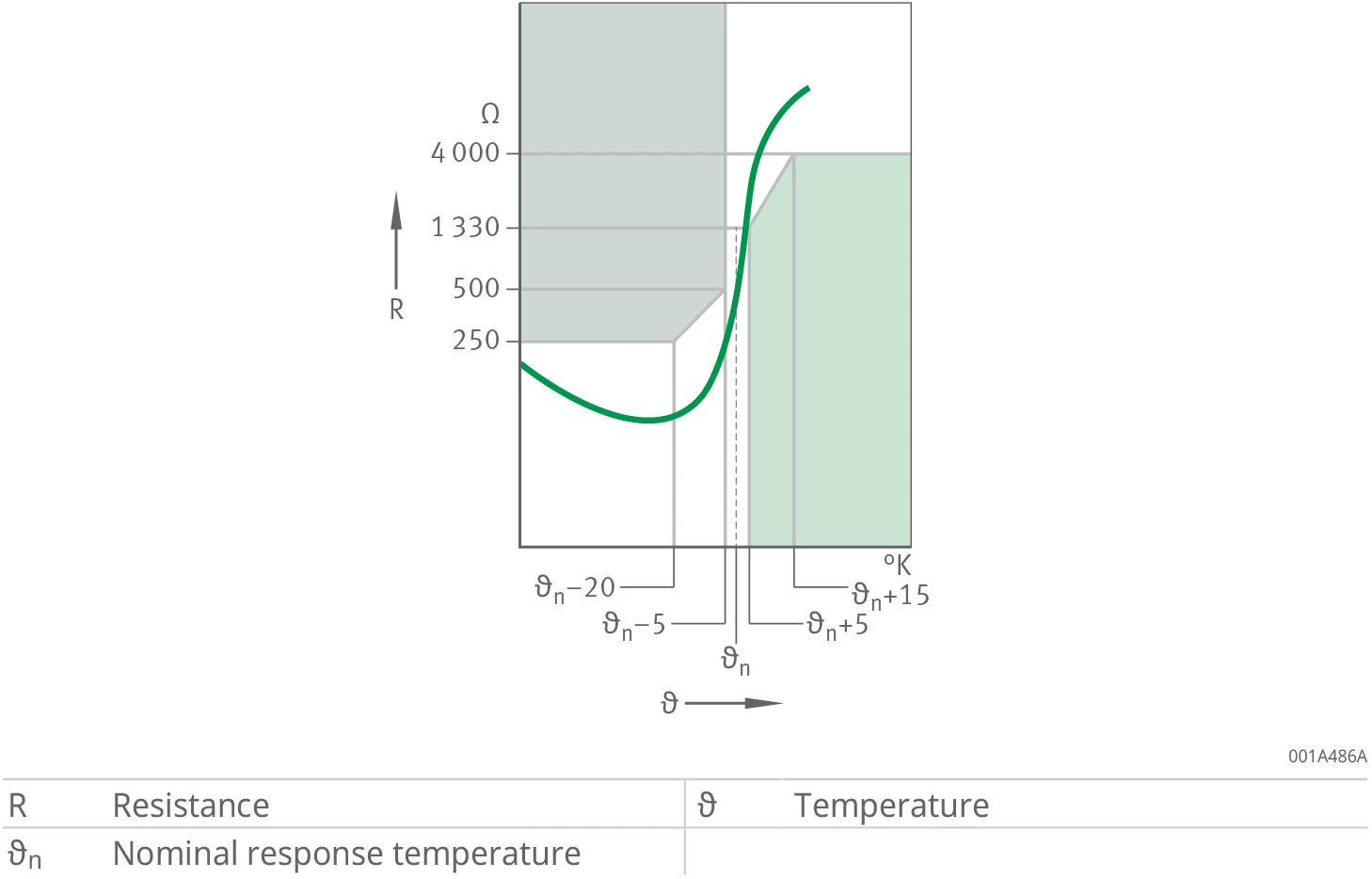
圖 6:PTC 溫度特性。縱軸為電阻 R(Ω),橫軸為溫度 ϑ。曲線在低於標稱響應溫度 ϑn 時電阻低,超過後急遽上升。標示電阻水平 250、500、1330、4000 Ω 與溫度區間 ϑn−20、ϑn−5、ϑn、ϑn+5、ϑn+15。符號定義:R=電阻、ϑ=溫度、ϑn=標稱響應溫度。
若 PTC 迴路的電阻過低,熱敏電阻馬達保護繼電器亦會反應。過低的電阻可能表示監控迴路有缺陷。熱敏電阻馬達保護繼電器可確保控制器與馬達內 PTC 感測器之間安全的電氣隔離。熱敏電阻馬達保護繼電器不在馬達的供貨範圍內。監控迴路 I 的 PTC 感測器不適合用於溫度量測。監控迴路 II 適合用於溫度量測。
原則上,連接至伺服轉換器的熱敏電阻馬達保護繼電器必須評估 PTC 感測器以保護馬達的溫度。
1.5.3 監控迴路 II(Monitoring circuit II)
Pt1000 為鉑量測電阻溫度感測器。此感測器利用鉑電阻的溫度相依性。EN 60751 描述此感測器特性。
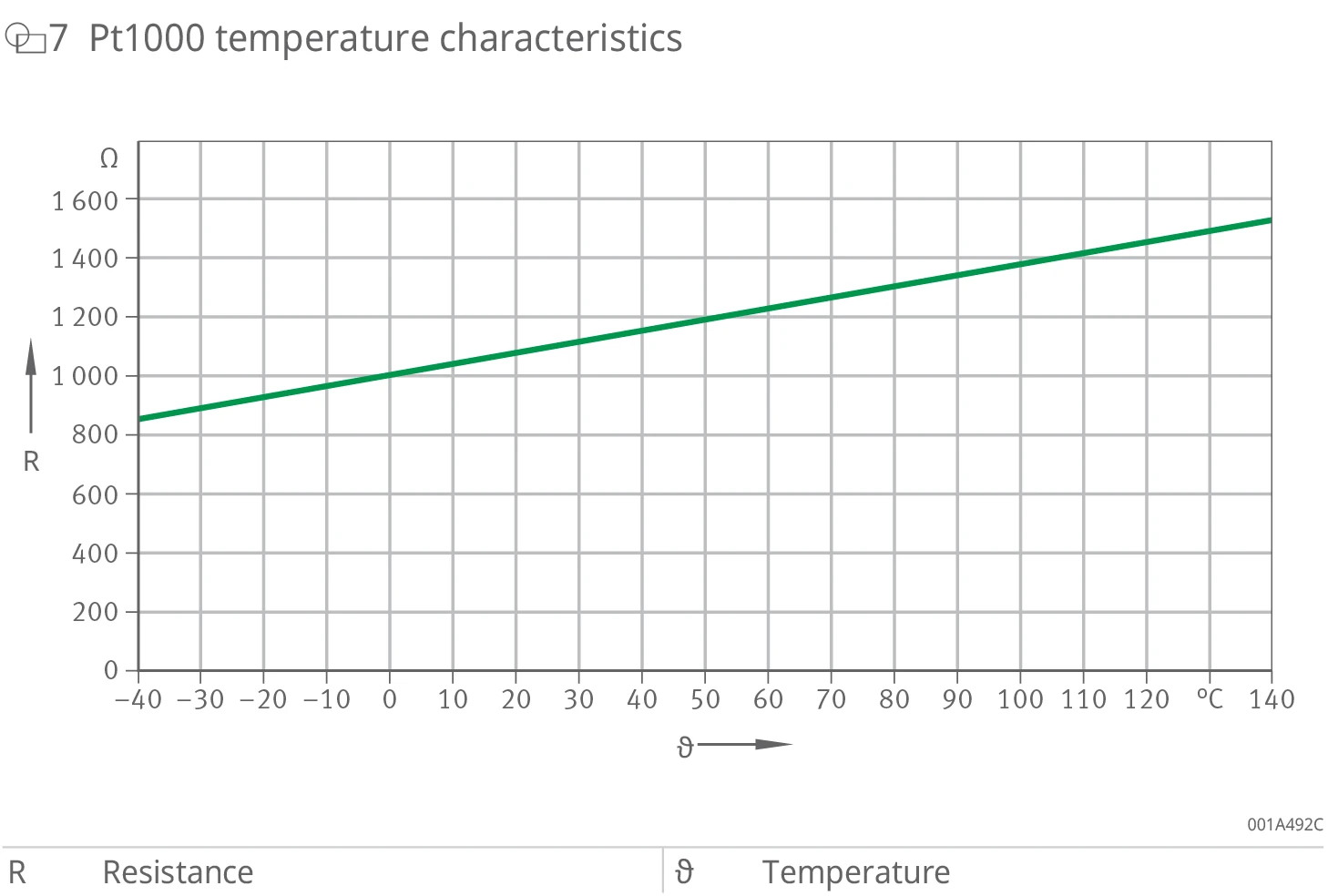
圖 7:Pt1000 溫度特性。縱軸為電阻 R(Ω),橫軸為溫度 ϑ(−40 至 +140 °C)。曲線呈線性上升,約 800 Ω(−40 °C)至約 1540 Ω(+140 °C)。符號定義:R=電阻、ϑ=溫度。
安裝狀態下的熱時間常數為數秒。控制器中輸入預警門檻與關機極限以保護馬達免於過溫。預警門檻可避免熱敏電阻馬達保護繼電器立即關機。
在靜止狀態下,視應用而定,固定電流可能流經馬達繞組。極位置決定固定電流的大小。由於此相依性,馬達不會被均勻加熱。未受監控的繞組可能過熱。一個 Pt1000 感測器只能監控一相。使用並評估三個 Pt1000 感測器可確保監控所有相。對於在靜止時經常達到負載極限的應用,Schaeffler Industrial Drives 建議使用並評估三個 Pt1000 感測器。
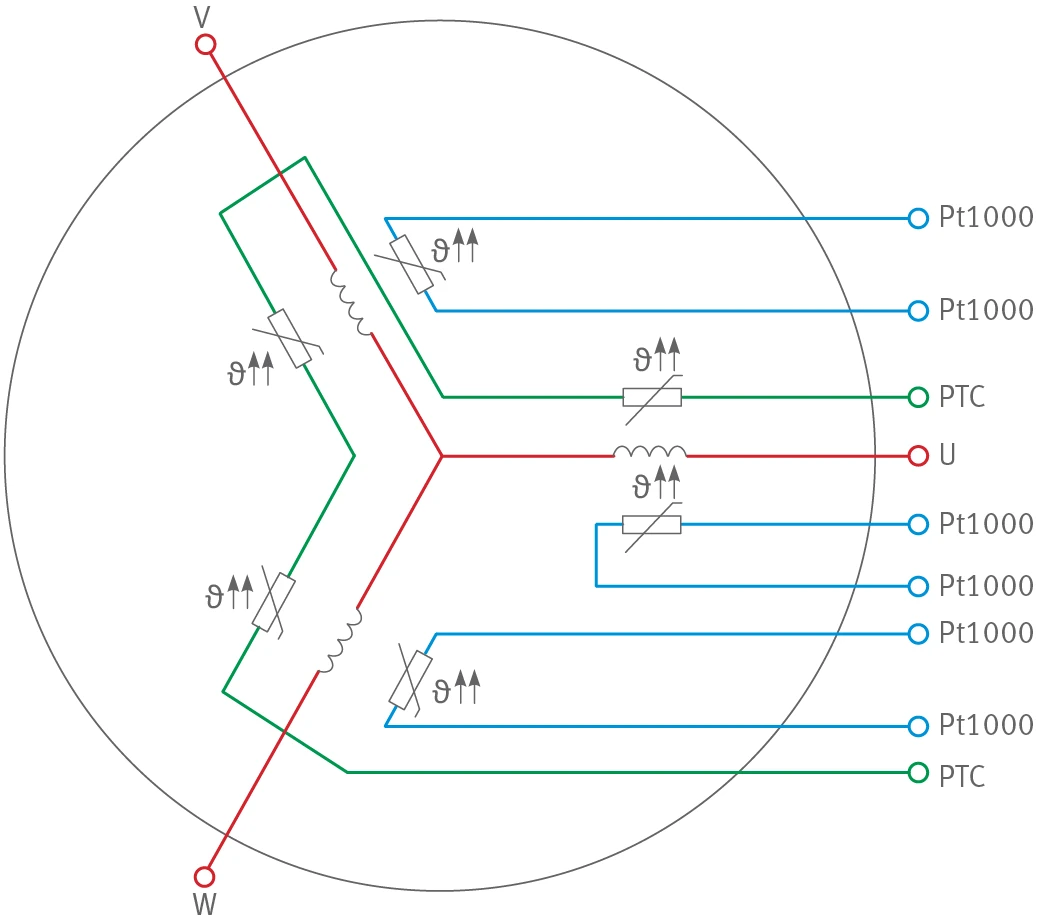
圖 8:三重 PTC 與 3 個 Pt1000 的接線。顯示馬達三相 V、U、W 繞組上 3 個 PTC(串聯)及 3 個 Pt1000 感測器的接線端子配置。
1.6 電氣連接技術(Electrical connection technology)
1.6.1 標準電纜連接(Standard cable connections)
Schaeffler Industrial Drives 馬達的標準電纜連接配備軸向螺絲連接。對於 RIB 扭矩馬達,其相對於冷卻接頭的位置位於電纜出線的中間。對於具有多個電纜出線的 RKI 扭矩馬達與 RKIB 扭矩馬達,相對位置無法統一定義。報價與交貨圖面以及 3D 模型優先,並提供具約束力的位置。
RIB 扭矩馬達隨附 2 m 電纜。電纜長度從馬達出線處量起。RKI 扭矩馬達與 RKIB 扭矩馬達隨附 2 m 或 5 m 電纜。亦可提供客製化電纜長度。
電源連接電纜的截面取決於馬達的連續電流。標準上,尺寸依 Plw(冷卻)下的連續電流 Icw eff 設計。可使用軸向、徑向與切向電纜出線。所需的電纜出線於下單時定義。對於超過 70 A 的馬達電流,電纜出線會依特定應用配對。
電纜具有以下特性:
- 遮蔽(shielded)
- 表面為聚氨酯,耐油與耐冷卻液
- 耐燃(flame resistant)
- 適用於拖鏈(drag chain)
標準版本的電纜末端為開放式並附套圈(ferrules)。可提供應用特定的電纜出線。
表 2:馬達電纜連接,標準
| 截面 | 連續電流 | 直徑 | 最小彎曲半徑,固定 | 最小彎曲半徑,可撓 | 質量 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4G0,75 | 10,4 | 8 | 40 | 80 | 95 |
| 4G1,5 | 16,1 | 9 | 45 | 90 | 140 |
| 4G2,5 | 22 | 10,5 | 52,5 | 105 | 210 |
| 4G4 | 30 | 12,5 | 62,5 | 125 | 296 |
| 4G6 | 37 | 14,5 | 72,5 | 145 | 416 |
| 4G10 | 52 | 17 | 85 | 170 | 644 |
| 4G16 | 70 | 20,5 | 102,5 | 205 | 997 |
表 3:馬達連接配置
| 標示 | 配置 |
|---|---|
| 1/U | 相 U(Phase U) |
| 2/V | 相 V(Phase V) |
| 3/W | 相 W(Phase W) |
| GNYE | PE |
感測器電纜可透過 PTC 與 Pt1000 感測器進行溫度監控。標準版本的電纜末端為開放式並附套圈。可提供應用特定的電纜出線。
表 4:感測器電纜連接,標準
| 截面 | 溫度監控 | 直徑 | 最小彎曲半徑,固定 | 最小彎曲半徑,可撓 | 質量 |
|---|---|---|---|---|---|
| – | – | mm | mm | mm | g/m |
| Sensor 4×0,14 | P 1) | 4,8 | 24 | 36 | 40 |
| Sensor 7×0,14 | – | 5,7 | 29 | 43 | 67 |
| Sensor 10×0,14 | T 2) | 6,7 | 34 | 50 | 87 |
1) P = 1 Pt1000 + 3 PTC 2) T = 3 Pt1000 + 3 PTC
表 5:連接配置,感測器型式 P
| 標示 | 配置 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000 |
| YE | Pt1000 |
表 6:連接配置,感測器型式 T
| 標示 | 配置 |
|---|---|
| WH | PTC |
| BN | PTC |
| GN | Pt1000-1 |
| YE | Pt1000-1 |
| GY | Pt1000-2 |
| PK | Pt1000-2 |
| BU | Pt1000-3 |
| RD | Pt1000-3 |
1.6.2 特殊電纜連接(Special cable connections)
對於 RKI 扭矩馬達與 RKIB 扭矩馬達,在某些情況下使用遮蔽單芯線可能有其意義。所選的單芯線及其位置可在報價與交貨圖面以及報價電路圖中查得。單芯線的一般特性值列於下表。
表 7:馬達電纜連接,特殊設計
| 截面 | 連續電流 | 直徑 | 最小彎曲半徑,固定 | 最小彎曲半徑,可撓 | 質量 |
|---|---|---|---|---|---|
| – | A | mm | mm | mm | g/m |
| 4×(1×2,5) | 22 | 4×6 | 24 | 45 | 4×58 |
| 4×(1×4) | 30 | 4×6,5 | 26 | 49 | 4×77 |
| 4×(1×6) | 37 | 4×7 | 28 | 53 | 4×101 |
| 4×(1×10) | 52 | 4×8,5 | 34 | 64 | 4×146 |
| 4×(1×16) | 70 | 4×10 | 40 | 75 | 4×223 |
| 4×(1×25) | 88 | 4×12 | 48 | 90 | 4×329 |
| 4×(1×35) | 110 | 4×13 | 52 | 98 | 4×444 |
1.6.3 馬達的正轉方向(Positive direction of rotation)
在所有三相馬達中,電氣正轉方向對應順時針旋轉磁場,亦即相電壓以 U、V、W 順序感應。Schaeffler Industrial Drives 的馬達在轉子運動時具有以下正轉方向:
- 從上方觀看電纜出線側時為逆時針
- 從下方背對電纜出線側觀看時為順時針
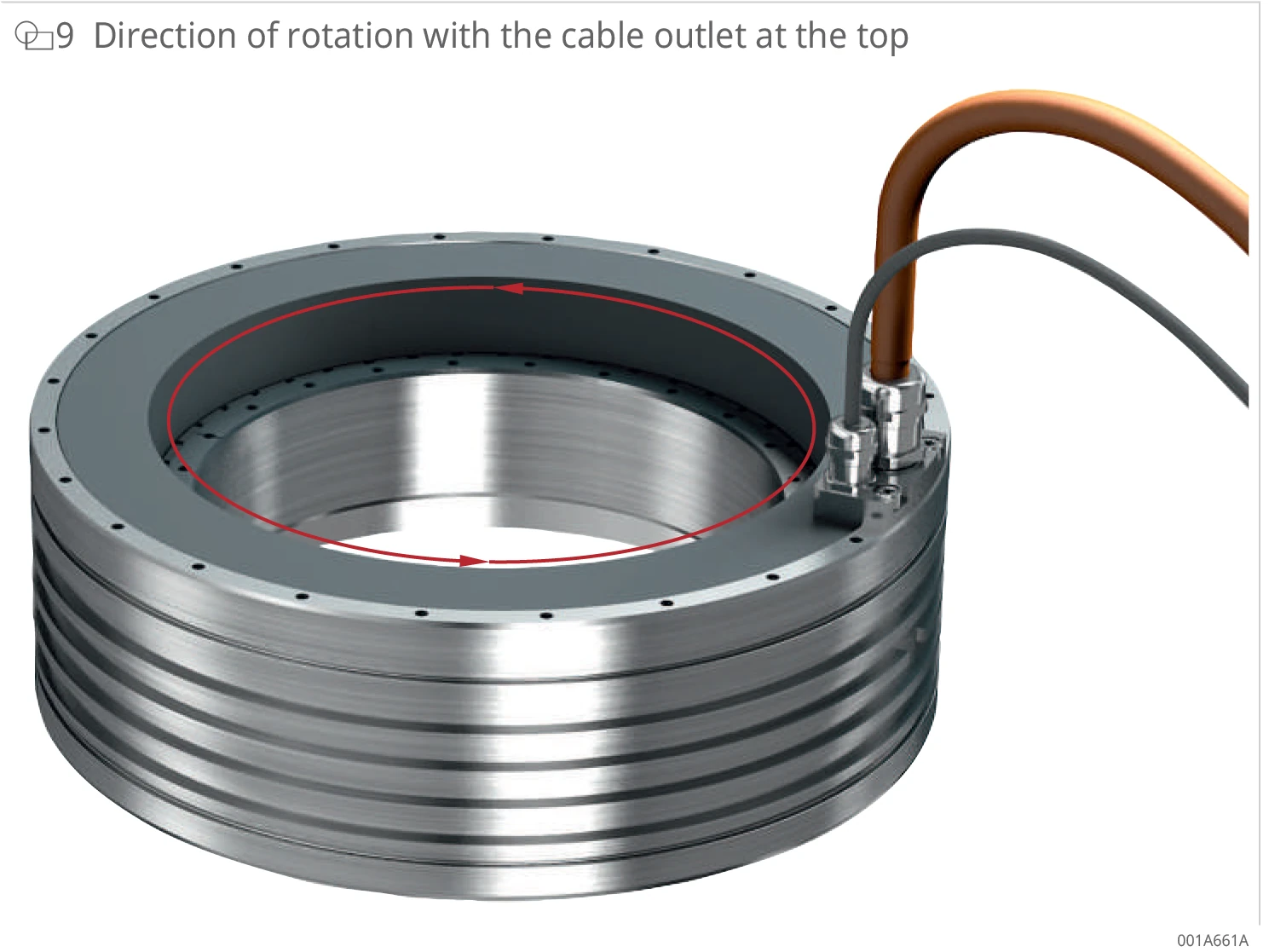
圖 9:電纜出線朝上時的旋轉方向。馬達照片標示轉子運動時的旋轉方向(紅色箭頭,逆時針)。
1.6.4 換相(Commutation)
同步馬達應盡可能採用換相運轉。Schaeffler 建議採用基於量測系統的換相,因為現代伺服驅動器與控制器皆支援此方式。
1.6.5 絕緣強度與過電壓現象(Isolation strength and overvoltage phenomena)
Schaeffler Industrial Drives 依下列指令開發、設計與製造馬達:2014/35/EU(特定電壓限制內使用的電氣設備)。馬達符合下列指令的要求:2014/30/EU(電磁相容性)。馬達依 DIN EN 61800-5-1 設計用於 PDS(電力傳動系統)的預定運轉。
馬達的絕緣系統依過電壓類別 III 設計並為最大壽命最佳化。絕緣系統的介電強度在交貨前會經過檢查。現代測試方法(例如量測局部放電起始電壓)可確保馬達長時間的壽命與性能。
安裝後,馬達為 PDS 的一部分。PDS 由馬達、馬達電纜以及供應模組、再生模組、驅動控制器與濾波器等轉換器組件構成。PDS 內可能發生非預期且不可預測的效應。控制器製造商通常會提供使用者應遵守的建議與專案規劃資訊。未遵守可能導致馬達或轉換器絕緣系統提早失效。
下列措施可確保更安全的運轉,與所用轉換器無關:
- 短電纜與大面積電纜屏蔽支援:短電纜與大面積的電纜屏蔽支援/接觸有助於避免馬達電纜上高頻反射所造成的過電壓。馬達與轉換器之間長度 10 m 或更長的馬達電纜會增加過電壓的機率。Schaeffler Industrial Drives 建議在機器投入運轉時,以適當的高壓技術量測馬達連接端子上的電壓。
- 選擇正確的馬達:馬達必須依轉換器的直流匯流排電壓選擇。多數情況下,直流匯流排電壓為 600 V。較低的直流匯流排電壓會降低動態響應與最大轉速。若直流匯流排電壓為 720 V 或更高,或安裝高度大於 2000 m,則需要強化絕緣系統。在此情況下,請聯絡 Schaeffler Industrial Drives。電感(相對相量測)遠高於 50 mH 的馬達,只有在轉換器製造商與 Schaeffler Industrial Drives 個別檢查後方可使用,否則電壓尖峰可能在 PDS(電力傳動系統)中引起共振並損壞絕緣系統。
必須遵守轉換器製造商的指示。若有下列任一情況,必須在請求中載明。或者,可在現場試車時量測暫態過衝:
- 具多軸轉換器模組或受調控供應的 PDS:此時相對於接地電位的電氣振盪及由此產生的電壓負載可能損壞馬達的絕緣系統。
- 過去曾發生較明顯絕緣損壞的應用
- 已存在對策的應用
對於 600 V 至 720 V 的直流匯流排電壓,馬達相間的過衝不得超過 1370 V。馬達相間的峰對峰值不得超過 2800 V。
受調控供應造成的線路反射與電氣振盪會疊加於馬達相與接地電位之間的量測中。評估時僅應考慮峰對峰值。峰對峰值不得超過 2350 V。
1.6.6 永磁同步馬達的短路行為(Short-circuit behaviour in permanent magnet synchronous motors)
在緊急情況下,相 U、V、W 短路可使扭矩馬達驅動的軸減速。此緊急制動會產生短路電流。短路負載的大小與持續時間必須納入 PDS(電力傳動系統)的尺寸設計中。若短路電流高於冷卻連續電流 Icw,則必須諮詢 Schaeffler Industrial Drives。馬達的制動行為依轉速與慣性矩計算。
1.7 冷卻與冷卻迴路(Cooling and cooling circuit)
1.7.1 熱分佈(Heat distribution)
馬達組件將運轉中產生的功率損耗傳遞至機器。為冷卻、對流、傳導與輻射所實施的設計措施,可用於影響與控制整個系統的熱分佈。掌握馬達中的熱源對結構設計至關重要。
在低轉速、即極變頻率 < 100 Hz 時,熱量僅由馬達繞組的銅損產生。在較高轉速、即極變頻率 > 100 Hz 時,轉子與定子的鐵損以及轉子的磁體損亦會發生。鐵損不隨極變頻率線性增加,並取決於磁場弱化角與電流密度。
在極變頻率 < 100 Hz 運轉時所產生的大部分熱量,可透過定子外表面的液冷系統散逸。所謂的套式冷卻系統連接至再冷卻器(recooler)的冷卻迴路。冷卻套通常是客戶特定機器設計的結構件,但也可由 Schaeffler Industrial Drives 另行提供。冷卻介質流經冷卻肋中的開口——即所謂的冷卻蜿道(cooling meander)——從進口到出口跨越不同層面。進口與出口可依需求指派給兩個接頭。流動區域以 O 形環對外密封。
對於高功率密度、高轉速、即極變頻率 > 100 Hz、優異動態響應或高精度的機器,Schaeffler Industrial Drives 另建議對周邊結構或轉子使用溫控系統(加熱或冷卻)。通常使用旋轉歧管(rotary manifold)來冷卻軸承與轉子。對周邊結構進行溫控有助於將機器結構的熱變形及其對軸承預壓的影響降至最低,從而提升精度。
定子採用液冷的扭矩馬達,其連續扭矩比無冷卻運轉高出最多 300 %。為達成高連續扭矩,扭矩馬達在多數應用中皆採用液冷運轉。
馬達冷卻的設計受下列因素影響:
- 安裝空間
- 精度需求
- 周邊結構的熱敏感性
- 所需轉速
1.7.2 冷卻介質及其對冷卻的影響(Cooling media and their effect on cooling)
性能資料以水作為冷卻介質為基礎。然而,水需要添加劑以防止冷卻迴路中的腐蝕與生物沉積。使用與水差異甚大的冷卻介質,會降低可散逸的熱量,從而也改變連續運轉中可用的冷卻連續扭矩 Tcw。如有需要,Schaeffler Industrial Drives 可協助應用的尺寸設計與可達成馬達資料的確定。
以客戶特定冷卻介質進行尺寸設計時,需要下列資訊:
- 類型與密度
- 比熱容
- 運動黏度
- 含成分物質的技術資料表
若使用黏度遠高於水的冷卻介質,使用前必須檢查其對冷卻的影響。可能需要調整 Icw eff 或 Tcw 等馬達參數。必須使用所用介質的資料,並將預期溫度納入考量。
水(Water)
水是最常用的冷卻介質。水具有高比熱容且價格低廉。含有防止腐蝕與生物沉積添加劑的水優於所有其他冷卻介質。COOL CONCENTRATE 或 COOL X 等添加劑幾乎不影響密度與黏度等特性。含有此類添加劑之一的水是非常高效的冷卻介質,比熱容為 4.1 kJ/kg·K。此值大致對應於水的值。
表 8:水的材料特性
| 溫度 | 密度 1) | 比熱容 | 動黏度 | 運動黏度 |
|---|---|---|---|---|
| °C | kg/m³ | kJ/kg·K | Pa·s | mm²/s |
| +20 2) | 998,21 | 4,1840 | 0,0010014 | 1,00319572 |
| +25 | 997,05 | 4,1813 | 0,00088982 | 0,892452736 |
| +30 | 995,65 | 4,1798 | 0,00079705 | 0,800532316 |
1) 依 DIN 1306,次要條件如氣壓與重力加速度適用 1 g,壓力 pn = 1.01325 bar。
2) 參考溫度。
水–乙二醇混合物(Water–glycol mixture)
水與乙二醇的混合物冰點比水低,並可防止腐蝕。此混合物常用於寒冷環境或需要防凍的應用。由於水–乙二醇混合物的黏度高於純水,管路系統的壓力損失較高。循環泵必須相應地輸送較高的壓力。
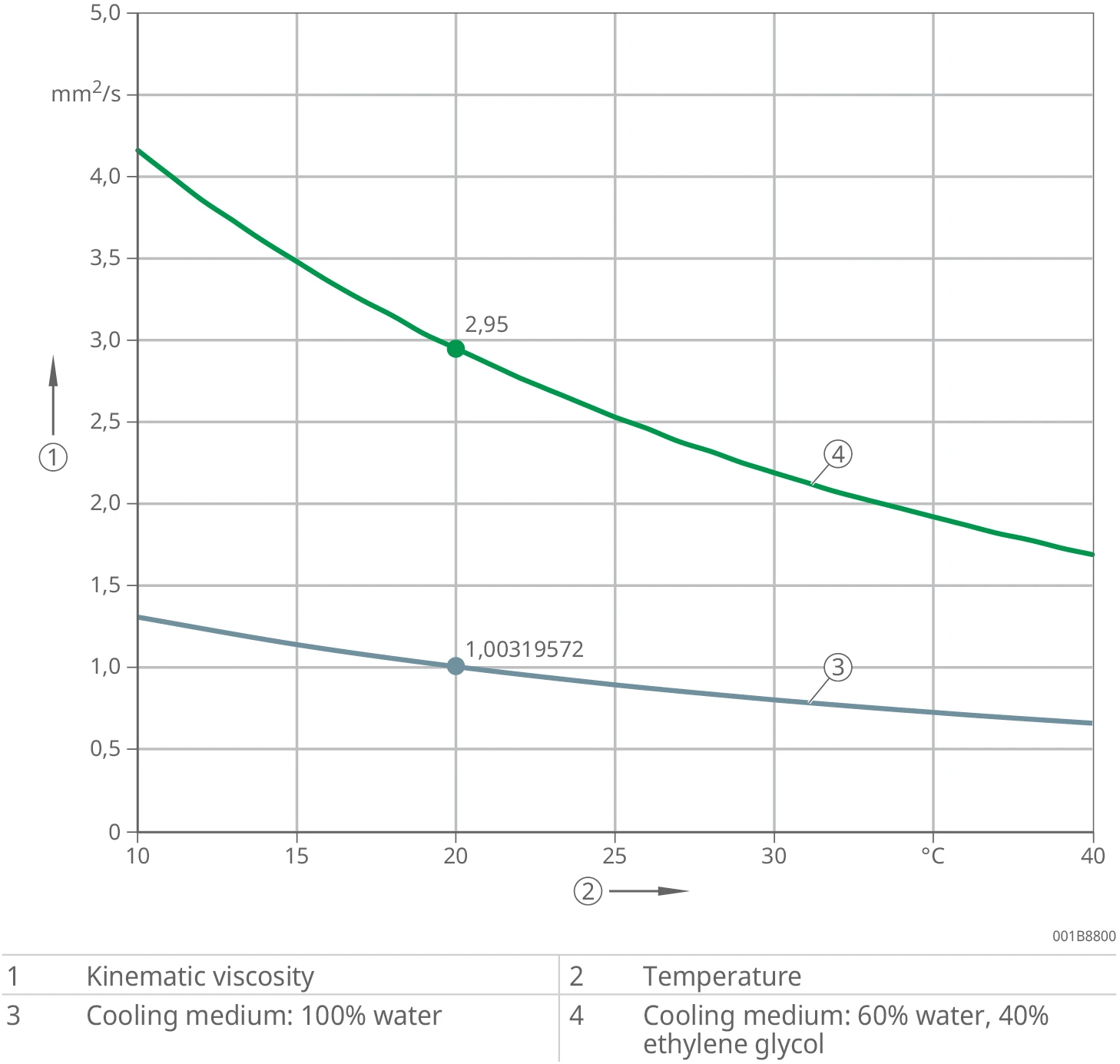
圖 10:運動黏度隨溫度的相依性。縱軸為運動黏度(mm²/s),橫軸為溫度(°C)。兩條曲線:③=冷卻介質 100% 水(20 °C 時 1.00319572)、④=冷卻介質 60% 水 + 40% 乙二醇(20 °C 時 2.95)。符號定義:①=運動黏度、②=溫度。
範例
40 % 乙二醇(例如 Antifrogen N)與 60 % 水的混合物,冰點為 −25 °C,運動黏度為水的 2.95 倍。只有在顯著較高的壓力下才能達到建議流量。修正係數可用於粗略估算。
表 9:乙二醇修正係數
| 濃度 | 冰點 | 壓差修正係數 |
|---|---|---|
| % | °C | – |
| 20 | −9 | 1,14 |
| 30 | −16 | 1,23 |
| 40 | −25 | 1,33 |
| 44 | −30 | 1,38 |
所用冷卻介質的精確值必須始終加以遵守。
油(Oils)
在某些工業應用中使用油作為冷卻介質。應用決定何種油適用。若使用油,必須始終達成冷卻所需的體積流量。如有需要,Schaeffler Industrial Drives 可協助尺寸設計。所有組件的化學相容性必須由客戶檢查。
1.7.3 標稱資料對供水溫度與冷卻介質的影響(Influence of nominal data on the supply temperature and cooling medium)
冷卻運轉所指定的連續電流 Icw eff 是相對於標稱冷卻水進水溫度 ϑnf。連續電流 Icw eff 列於性能資料中。
較高的供水溫度 ϑf 會降低冷卻能力,因此也降低連續電流。降額連續電流 Ic red 由下列二次方關係式計算:
公式 2:降額連續電流(Reduced continuous current)
Ic red / Icw eff = √(ϑmax − ϑf) / (ϑmax − ϑnf)
| 符號 | 單位 | 說明 |
|---|---|---|
| Ic red | A | 降額連續電流(Reduced continuous current) |
| Icw eff | A | 有效連續電流,冷卻(Effective continuous current, cooled) |
| ϑmax | °C | 最大允許繞組溫度(Max. permissible winding temperature) |
| ϑnf | °C | 標稱進水溫度(Nominal feed temperature) |
| ϑf | °C | 當前進水溫度(Current feed temperature) |
若使用客戶特定冷卻介質,可散逸的廢熱量會改變,因此連續運轉中可用的冷卻連續扭矩也會改變。如有需要並提供物質特性,Schaeffler Industrial Drives 的工程師可確定所用冷卻介質的影響。
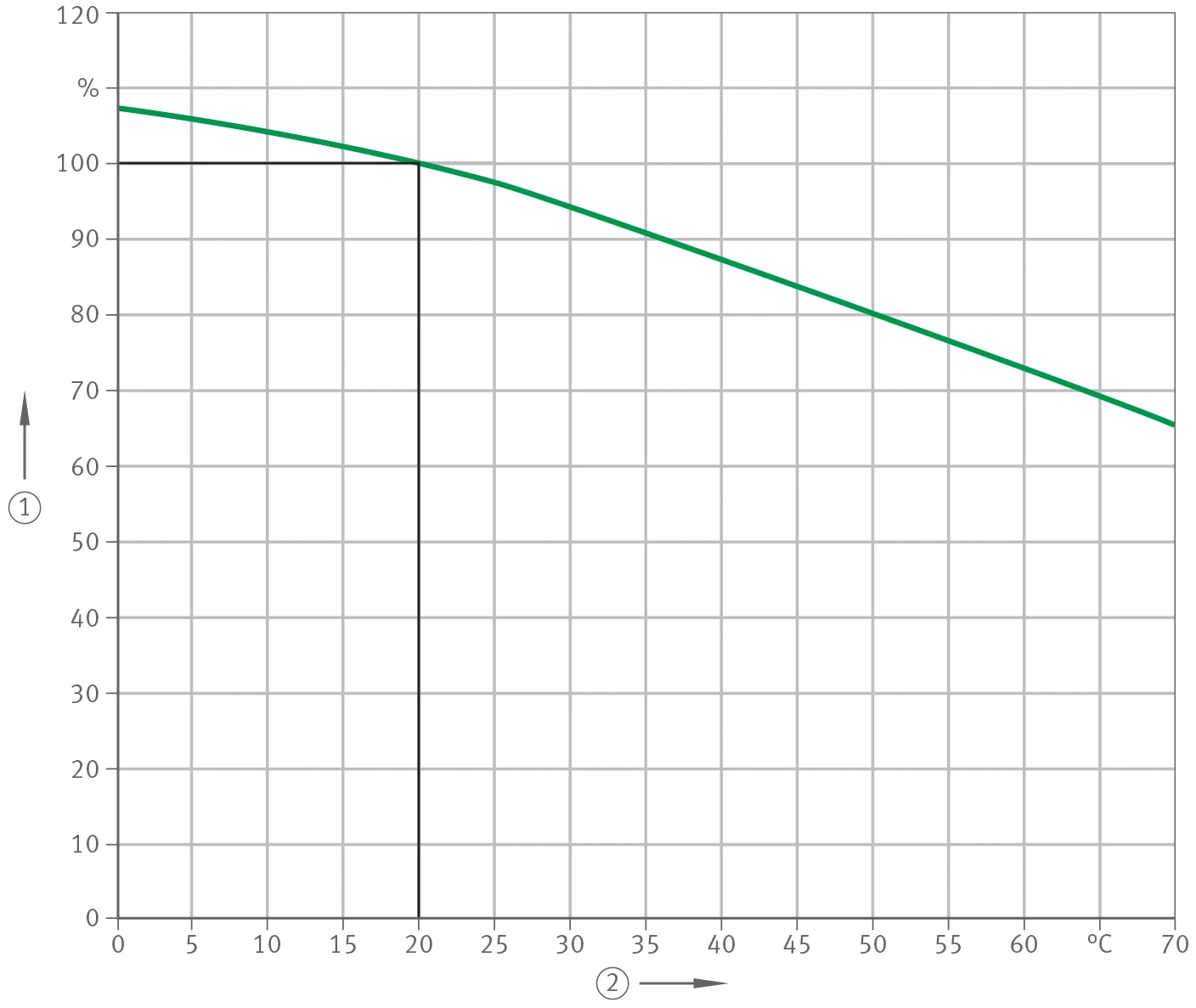
圖 11:相對連續電流 Ic red / Icw eff 隨供水溫度 ϑf 變化的函數(ϑnf = +20 °C)。縱軸為相對連續電流(%),橫軸為實際供水溫度 ϑf(°C)。曲線於 +20 °C 為 100%,隨溫度上升而下降。符號定義:①=相對連續電流 Ic red / Icw eff(%)、②=實際供水溫度 ϑf、Ic red=降額連續電流、Icw eff=連續電流(冷卻)、ϑnf=標稱進水溫度。
1.8 馬達排列(Arrangement of motors)
1.8.1 多馬達於單軸並聯運行(Operating several motors in parallel on one axis)
以 2 個或更多同步馬達同時驅動一軸在某些應用中有其意義。此類應用包括五軸加工中心的樞軸系統、叉式銑頭,或滾齒機的機器主軸。結構相同的同步馬達並聯連接可在同一轉換器上一起運轉。只有在低轉速下,兩個扭矩馬達於單軸並聯運轉才能達到令人滿意的同步品質。因此實務上僅 RIB 系列扭矩馬達用於並聯運轉。RIB 系列扭矩馬達比 RKIB 系列扭矩馬達慢。
1.8.2 馬達排列(Arrangement of motors)
區分為平行串接(parallel tandem)排列與反平行(亦即鏡像、Janus)排列的定子。
轉子對齊(Secondary part alignment)
在並聯運轉中,無論何種排列,轉子都必須對齊於相同的角度位置。可使用各自的轉子標記進行對齊。
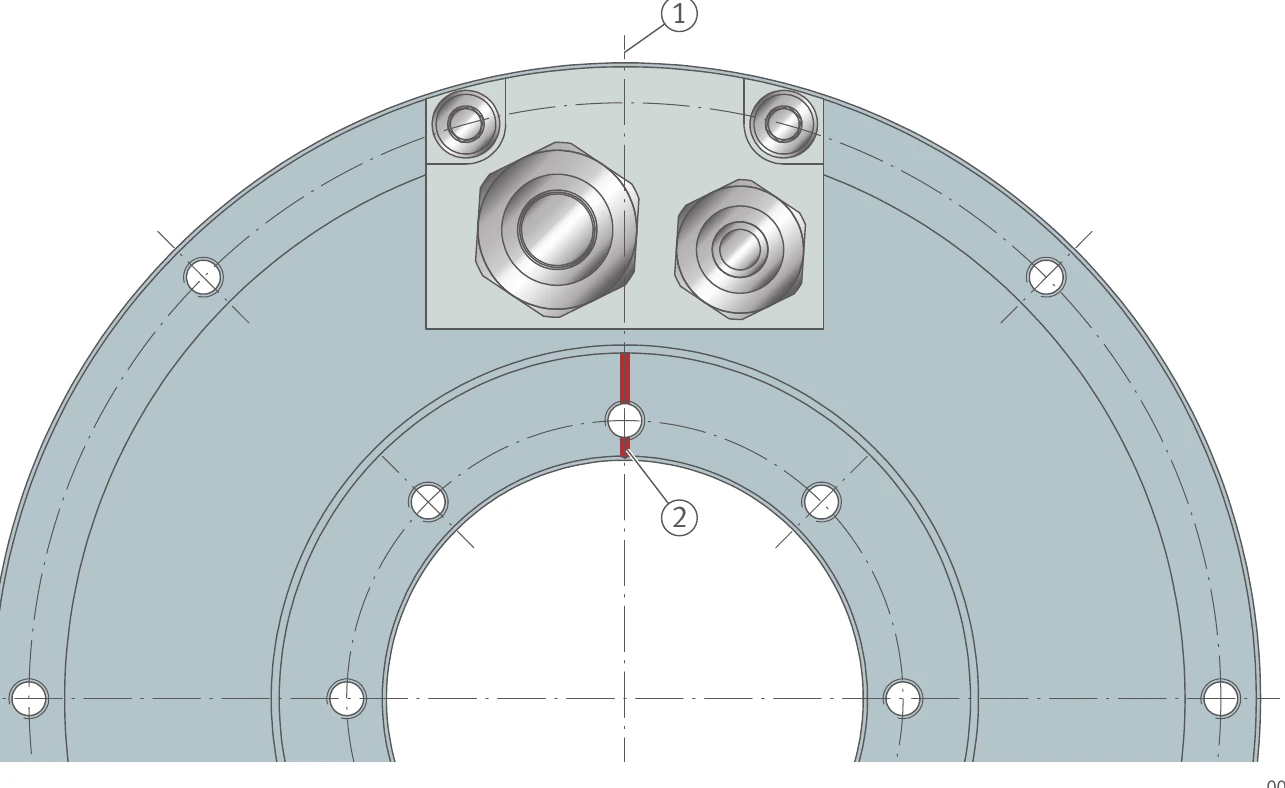
圖 12:零軸與旋轉標記對齊。①=零軸(Zero axis)、②=轉子(轉子)標記(Secondary part rotor marking)。
定子對齊(Primary part alignment)
目標是將各相的線圈對齊於相同的角度位置。定子可使用零軸對齊。在具單一電纜出線的標準 RIB 馬達中,零軸位於電纜夾上的孔之間。對於客戶特定或多重電纜出線,必須諮詢 Schaeffler Industrial Drives 以確定零軸。
在規劃並聯運轉之前,必須先聯絡 Schaeffler Industrial Drives。
串接排列(Tandem arrangement)
電纜出線指向相同的縱向方向。
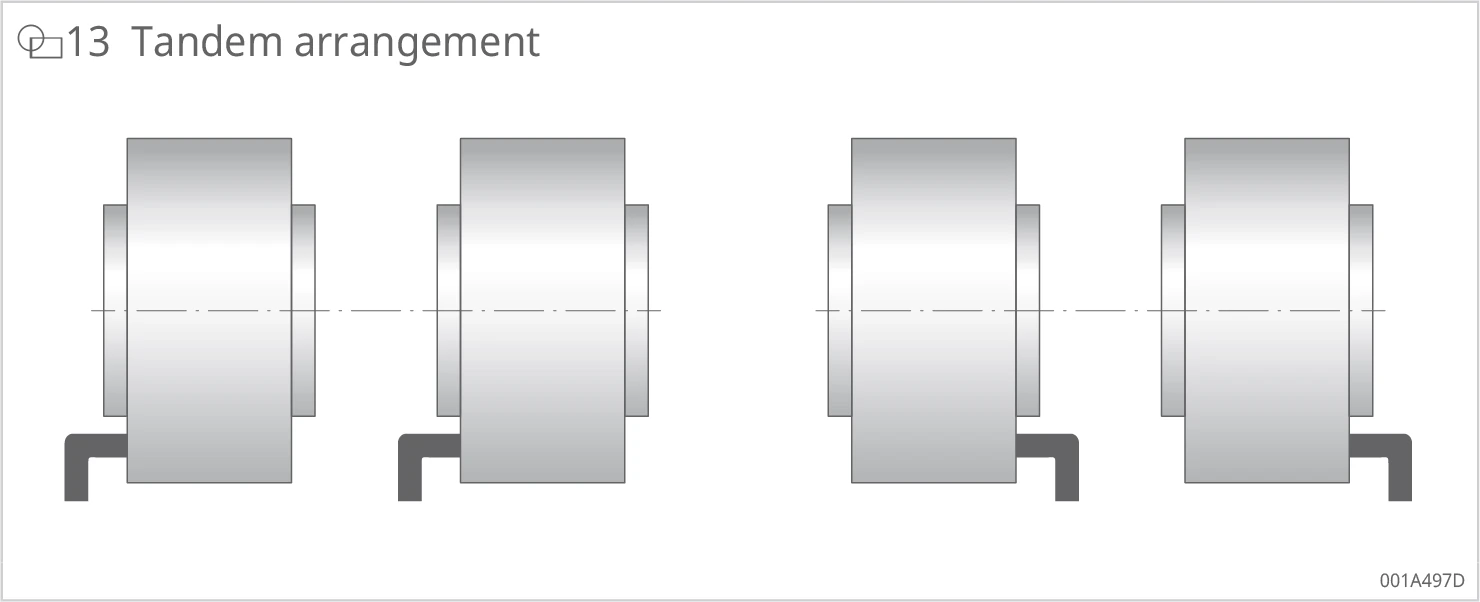
圖 13:串接排列。兩對馬達電纜出線指向相同縱向方向的示意圖。
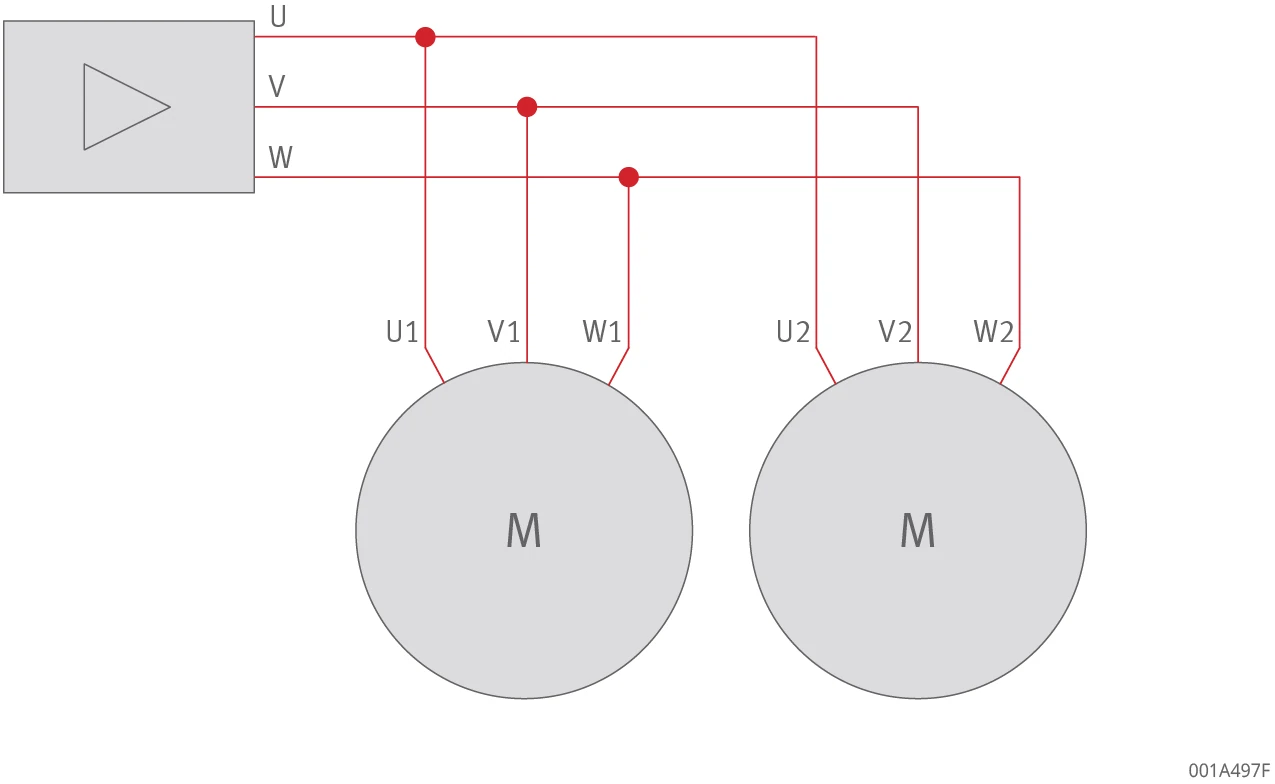
圖 14:串接排列接線圖。轉換器 U、V、W 三相分別連接至兩個馬達 M 的 U1/V1/W1 與 U2/V2/W2 端子(同名相連接在一起)。
定子的零軸亦與電纜出線對齊。在齊平同軸電纜出線的情況下,螺栓圓必須同心配置,且同名的相連接必須對齊。
Janus 排列(Janus arrangement)
電纜出線指向相反的縱向方向。
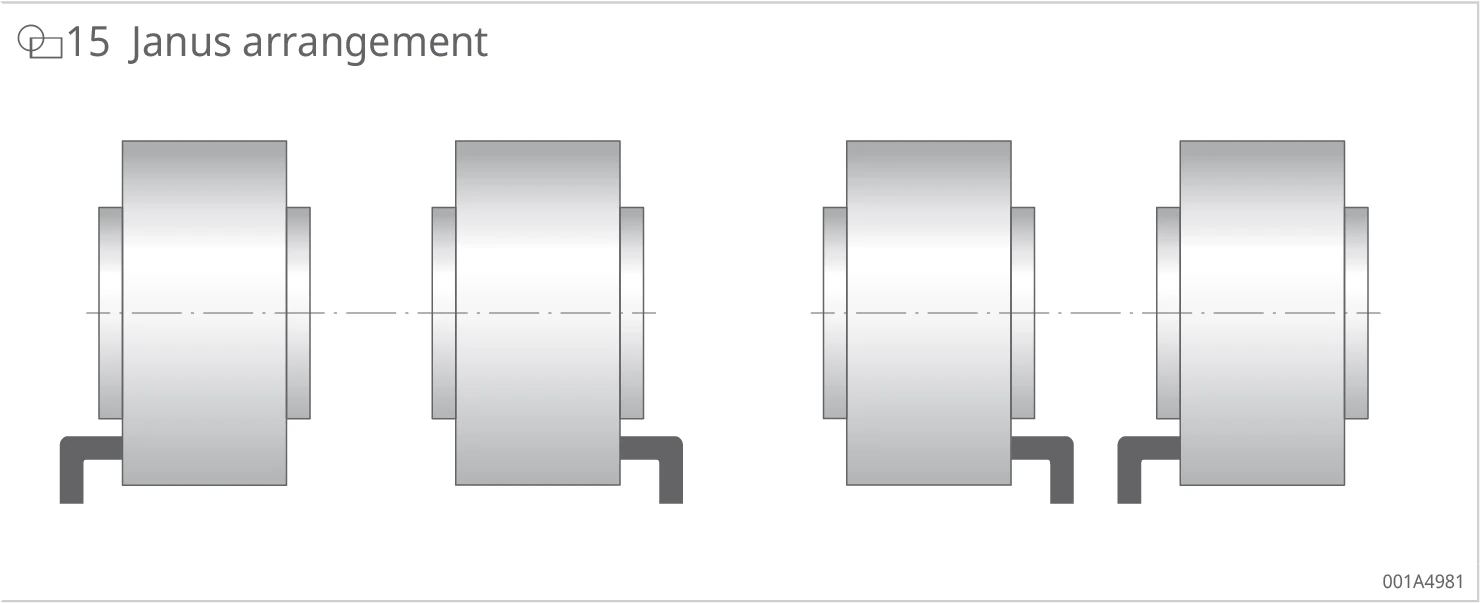
圖 15:Janus 排列。兩對馬達電纜出線指向相反縱向方向的示意圖。
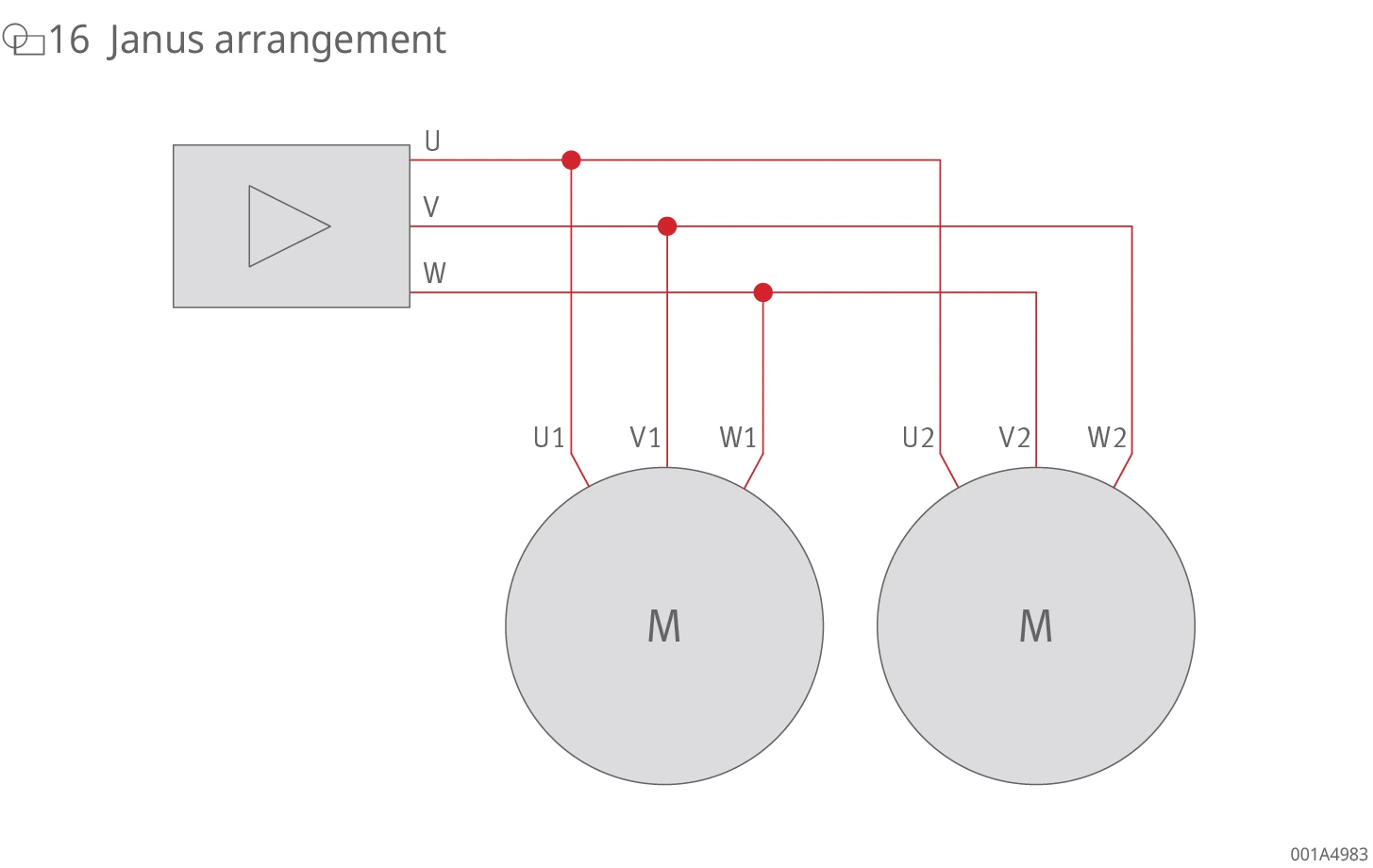
圖 16:Janus 排列接線圖。轉換器 U、V、W 三相連接至兩個馬達 M,其中一個馬達的 V 與 W 相互換以達成鏡像運轉。
在鏡像的 Janus 排列中,零軸也必須一致。視零軸位置而定,可能需要偏移螺栓圓。鏡像排列中的馬達必須以相反的旋轉方向運作。為此,兩個馬達其中之一的 V 相與 W 相互換。因此 U1 與 U2、V1 與 W2、W1 與 V2 一起連接至轉換器。
1.9 多馬達於單軸並聯運行(Operating several motors in parallel on one axis)
1.9.1 電纜出線位移(Displacement of the cable outlet)
在所有排列中,定子(因此電纜出線)可彼此以特定大小的步距扭轉。特別是在具內部電纜出線的 Janus 排列中,可藉由扭轉定子來設計較短的整體軸。步距對應於一對極,且必須乘以整數因子。
扭轉角度計算如下:
公式 3:扭轉角度(Torsion angle)
扭轉角度 = ( 360° / 極對數 ) · x
| 符號 | 單位 | 說明 |
|---|---|---|
| x | – | 任意整數因子(any integer factor) |
在某些系列中,於螺栓圓中也可達成有利的扭轉角度,例如 RIB11-3P-230xH:
公式 4:螺栓圓中的扭轉角度(Torsion angle in bolt circle)
扭轉角度 = ( 360° / 22 ) · 11 = 180°
1.9.2 設定相位一致(Setting the phase coincidence)
在所有情況下,都應檢查並聯馬達彼此是否相位對齊。若相位未對齊,會因感應的短路電流而產生與轉速相關的扭矩常數與效率下降。
相位對齊透過以雙通道示波器量測馬達的反電動勢,並同時旋轉相連的轉子來完成。為使互連馬達達成良好的靜態功能,兩條曲線之間的相位偏移不得超過 ±5°。機械調整轉子或定子可消除馬達間既有的電氣相位偏移。
下列關係式適用:
公式 5:機械角度定理(Mechanical angle theorem)
機械角度設定 = 相位偏移 / 極對數
正確安裝時,對應於 EN 20273 中等公差等級的螺栓圓螺栓接合間隙足以進行微調。若超過兩個馬達並聯連接,則定義其中一個為主馬達,並作為對齊其餘所有馬達的參考點。
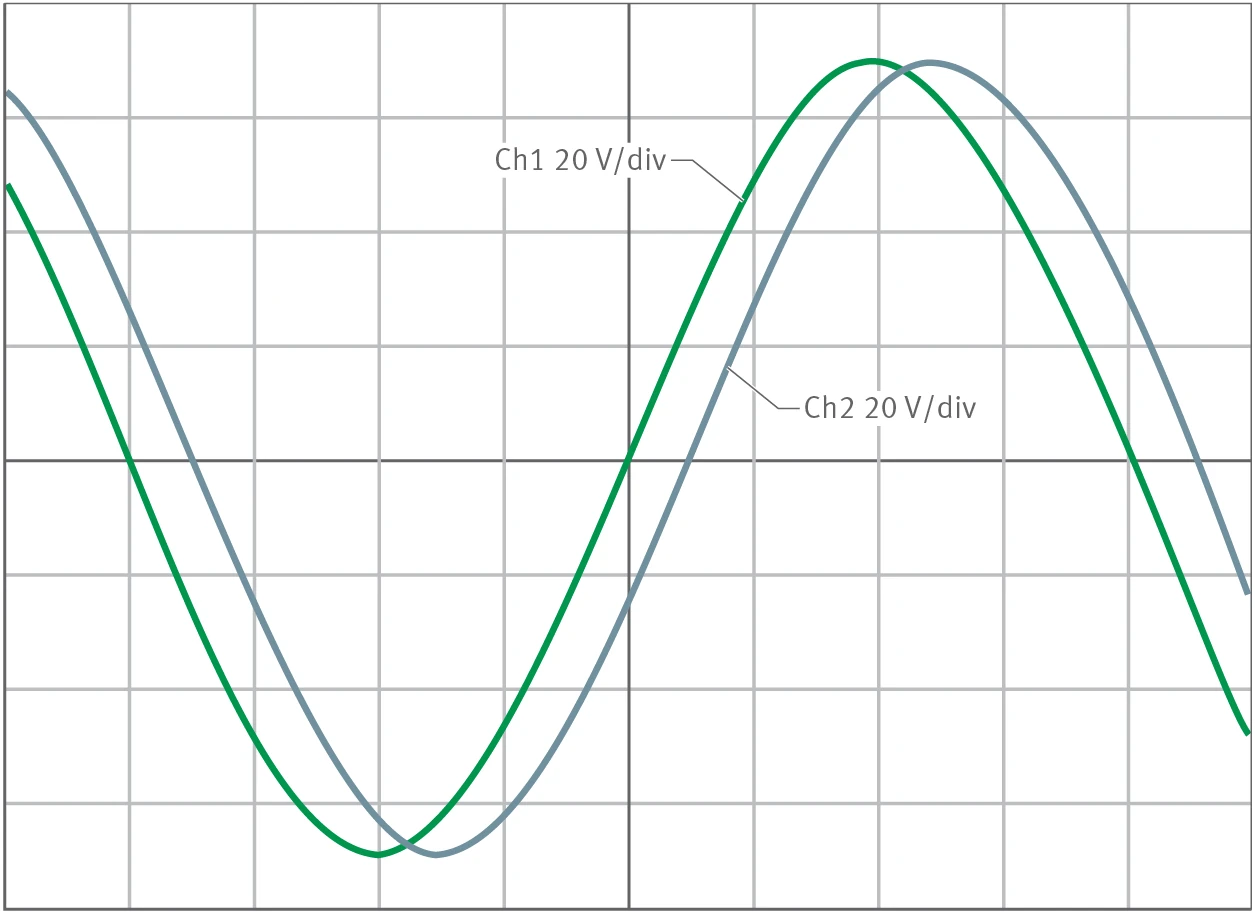
圖 17:反電動勢之間的相位偏移 22.5°。雙通道示波器顯示兩條反電動勢曲線(Ch1 20 V/div、Ch2 20 V/div)之間的相位偏移。
1.9.3 溫度感測器的評估(Evaluation of the temperature sensors)
馬達彼此對齊不正確或不精確可能造成馬達熱過載。整合的 PTC 感測器可保護馬達。排列中各馬達的 PTC 感測器串聯連接,並由熱敏電阻馬達保護繼電器評估。
為防止馬達保護系統提早跳脫,在三個或更多 PTC 監控迴路的情況下,Schaeffler Industrial Drives 建議使用多個或多通道熱敏電阻馬達保護繼電器。
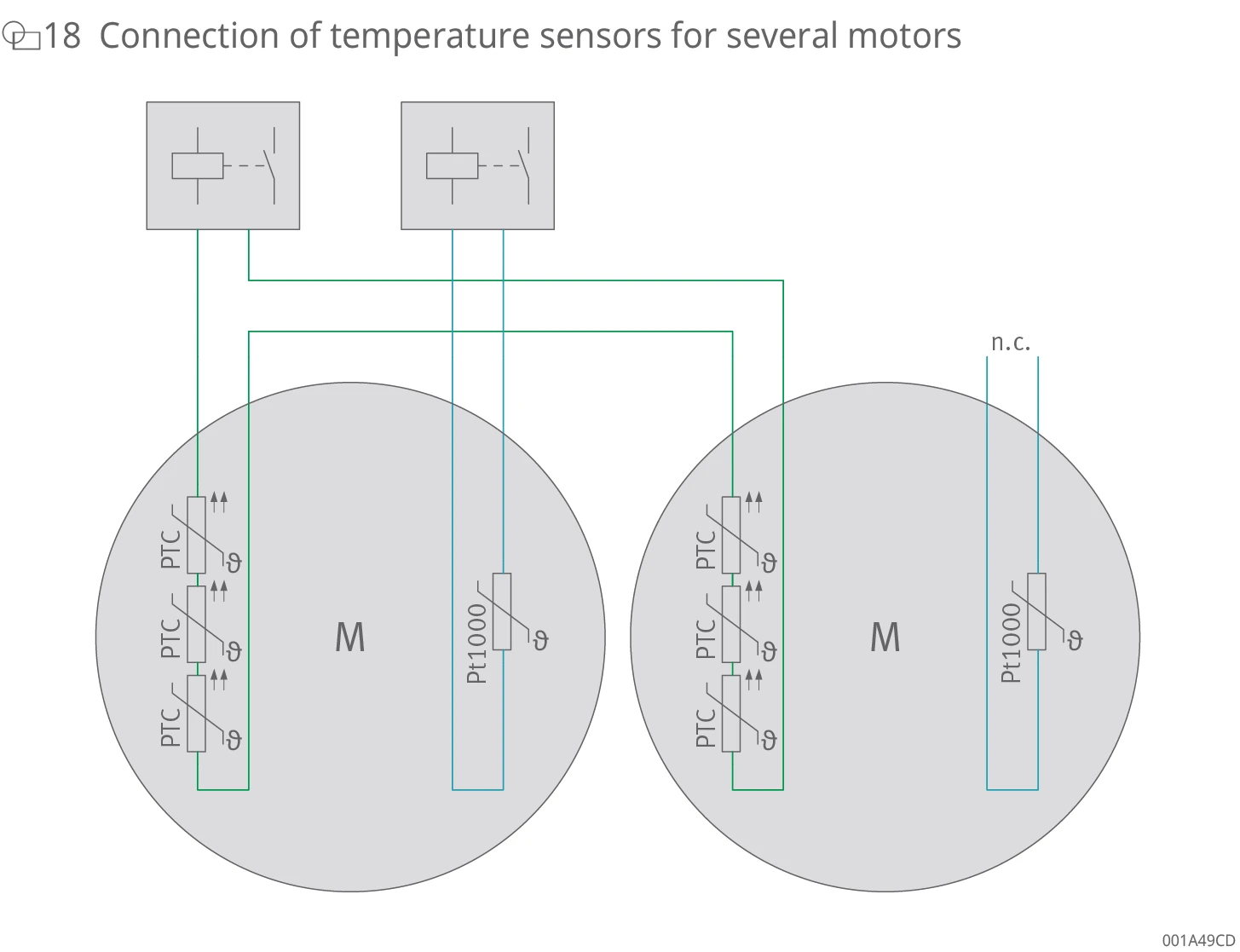
圖 18:多馬達溫度感測器接線。兩個馬達 M 的 PTC(串聯)連接至馬達保護繼電器,各馬達另有 Pt1000 感測器(其中一個標示 n.c. 未連接)。
1.9.4 合成馬達資料(Resulting motor data)
結構相同的個別馬達並聯連接,會為轉換器產生新的等效馬達電氣資料。這些電氣資料可輕易由個別馬達的下列資料確定:
- 極對數、扭矩常數、電壓常數、時間常數與轉速保持不變。
- 電流、扭矩與阻尼常數乘以個別馬達的數量。
- 電阻與電感除以個別馬達的數量。
1.10 旋轉應用的直驅選型(Selection of direct drives for rotary applications)
1.10.1 循環應用(Cycle applications)
循環運轉由連續的定位運動以及其間的運動暫停所組成。簡單的定位動作呈現為正向加速運動與隨後的制動。若負加速度的值相同,則加速時間與制動時間相同。最大角速度 ωmax 在加速階段結束時達到。
循環以 ω-t 圖描述。循環運轉的 ω-t 圖顯示具暫停的正/反向旋轉。
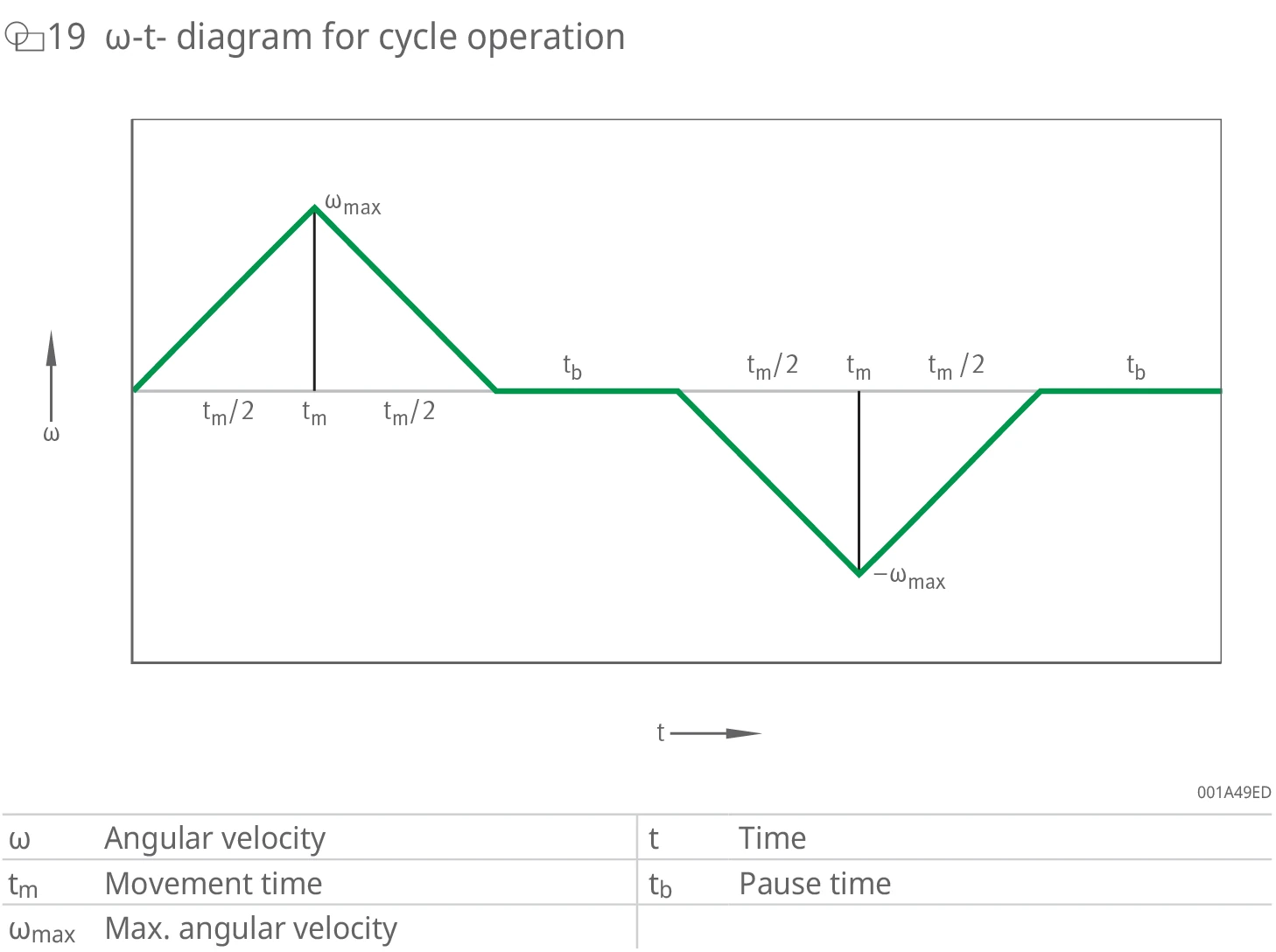
圖 19:循環運轉的 ω-t 圖。縱軸為角速度 ω,橫軸為時間 t。顯示正/反向旋轉與暫停,標示運動時間 tm、暫停時間 tb 與最大角速度 ωmax。符號定義:ω=角速度、tm=運動時間、ωmax=最大角速度、t=時間、tb=暫停時間。
循環運轉的 α-t 圖以及運動所需扭矩的曲線,由具暫停的正/反向旋轉得出:
公式 6:扭矩(Torque)
T = J · α
| 符號 | 單位 | 說明 |
|---|---|---|
| T | Nm | 扭矩(Torque) |
| J | kg·m² | 慣性矩(Mass moment of inertia) |
| α | rad/s² | 角加速度(Angular acceleration) |
馬達選型依所需循環的扭矩曲線,依下列三項準則進行:
- 循環中最大扭矩 ≤ Tp(依性能資料)
- 循環中有效扭矩 ≤ Tc(馬達無冷卻)或 Tcw(水冷)(依性能資料)
- 循環中最大轉速 ≤ nlp(依性能資料)
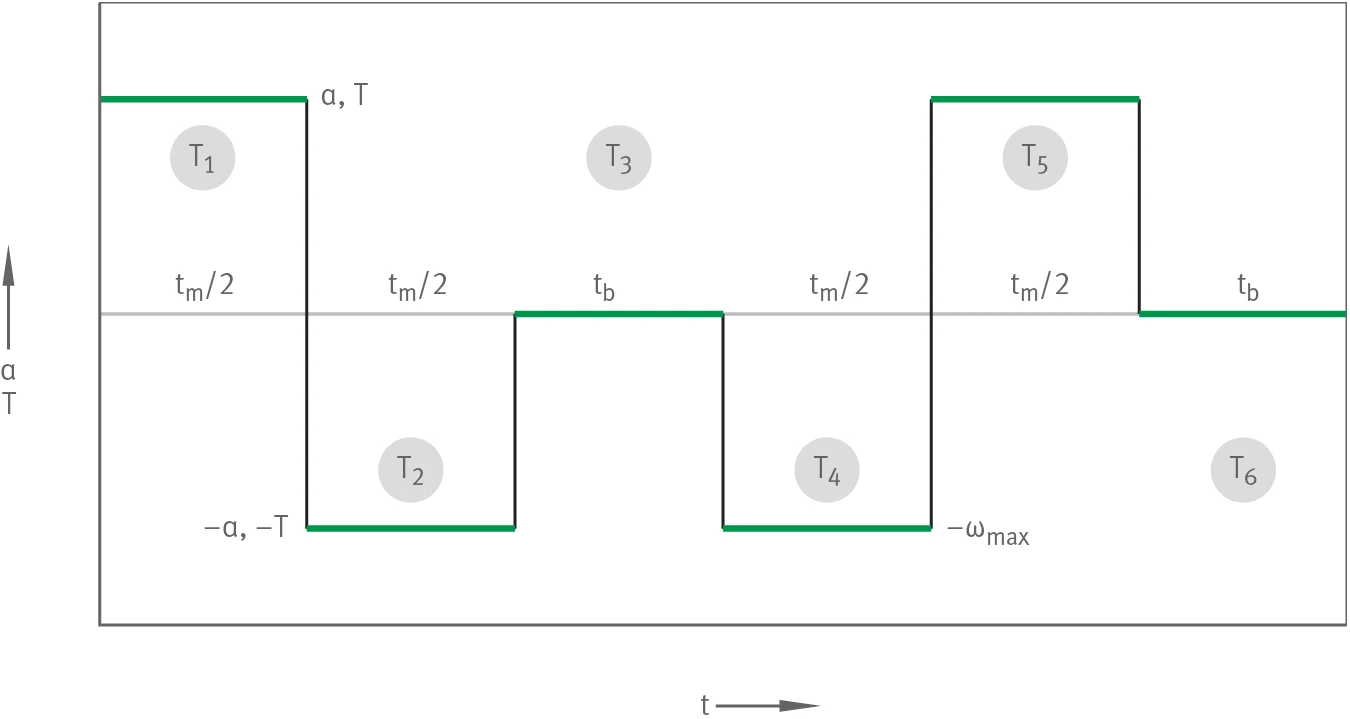
圖 20:循環運轉的 α-t 圖。縱軸為角加速度 α 與扭矩 T,橫軸為時間 t。顯示六個扭矩步階 T1~T6。符號定義:α=角加速度、tm=運動時間、ωmax=最大角速度、t=時間、tb=暫停時間、T=扭矩、T1=扭矩步階 1(T1=T)、T2=扭矩步階 2(T2=−T)、T3=扭矩步階 3(T3=0)、T4=扭矩步階 4(T4=−T)、T5=扭矩步階 5(T5=T)、T6=扭矩步階 6(T6=0)。
有效扭矩等於由循環中六個扭矩步階構成之扭矩曲線的均方根值。
公式 7:有效扭矩(Effective torque)
Teff = √(T12·t1 + T22·t2 + … + T62·t6) / (t1 + t2 + … + t6)
| 符號 | 單位 | 說明 |
|---|---|---|
| Teff | Nm | 有效扭矩(Effective torque) |
| T1 | Nm | 扭矩步階 1,T1 = T |
| t1 | s | 運動時間 1,t1 = tm/2 |
| T2 | Nm | 扭矩步階 2,T2 = −T |
| t2 | s | 運動時間 2,t2 = tm/2 |
| T6 | Nm | 扭矩步階 6,T6 = 0 |
| t6 | s | 運動時間 6,t6 = tb |
我們建議扭矩採用 1.4 的安全係數。安全係數考慮了馬達在扭矩–電流特性曲線非線性區運轉等情況,此時 Teff 的計算式僅近似適用。
有效扭矩可由下列扭矩計算:
- T1 = T
- T2 = −T
- T3 = 0
- T4 = −T
- T5 = T
- T6 = 0
有效扭矩可由下列時間計算:
- t1 = tm/2
- t2 = tm/2
- t3 = tb
- t4 = tm/2
- t5 = tm/2
- t6 = tb
公式 8:有效扭矩(Effective torque)
Teff = T · √tm / (tm + tb)
公式 9:有效扭矩(Effective torque)
Teff = J · α · √tm / (tm + tb)
若循環中僅有相同大小的扭矩作用,則此方程式適用於有效扭矩(公式 9)。慣性矩與角加速度為定值。運動時間除以運動時間與暫停時間之和置於根號下。循環時間納入分母中。
定位運動的角加速度、最大角速度與最大轉速可由下列公式計算:
公式 10:角加速度(Angular acceleration)
α = (4 · φ) / tm2
| 符號 | 單位 | 說明 |
|---|---|---|
| α | rad/s² | 角加速度(Angular acceleration) |
| φ | ° | 運動角度(Movement angle) |
| tm | s | 運動時間(Movement time) |
公式 11:最大角速度(Max. angular velocity)
ωmax = (2 · φ) / tm
| 符號 | 單位 | 說明 |
|---|---|---|
| tm | s | 運動時間(Movement time) |
公式 12:最大轉速(Max. speed)
nmax = (30 / π) · ωmax
此處所示的計算方法為理想化與簡化的。例如角加速度的增加為無限快。實務上,角加速度受馬達電感或其他組件限制。設計中以安全係數,或在高動態運動的情況下以每次定位作業額外加上 15 ms 至 20 ms 的時間,來考量這些效應。
1.10.2 循環應用範例(Example of cycle applications)
表 10:指定值
| 指定值 | 單位 | 數值 |
|---|---|---|
| 運動角度 φ | ° | 180 |
| 運動時間 tm | s | 0,5 |
| 循環時間 tm + tb | s | 1,35 |
| 慣性矩 J | kg·m² | 2,5 |
| 摩擦扭矩 TF | Nm | 8 |
| 安全係數 SF | – | 1,4 |
計算(Calculation)
運動角度換算:
公式 13:運動角度換算(Movement angle conversion)
φ = (π / 180) · 180 rad = 3,142 rad
最大角速度:
公式 14:最大角速度(Max. angular velocity)
ωmax = (2 · φ) / tm = (2 · 3,142) / 0,5 rad/s = 12,57 rad/s
最大轉速:
公式 15:最大轉速(Max. speed)
nmax = (30 / π) · ωmax = (30 / π) · 12,57 1/s = 120 min⁻¹
角加速度:
公式 16:角加速度(Angular acceleration)
α = (4 · φ) / tm2 = (4 · 3,142) / 0,52 rad/s² = 50,27 rad/s²
考量軸承摩擦扭矩 TF 後,最大扭矩如下:
公式 17:最大扭矩(Max. torque)
Tmax = (J · α) + TF = (2,5 · 50,27) + 8 = 133,68 Nm
考量軸承摩擦扭矩 TF 後的有效扭矩:
公式 18:有效扭矩(含軸承摩擦扭矩)(Effective torque, taking into account the bearing frictional torque)
Teff = ( J · α · √tm / (tm + tb) ) + TF = ( 2,5 · 50,27 · √0,5 / 1,35 ) + 8 = 84,48 Nm
考量安全係數 SF 後,馬達依下列要求選型:
Tsafe max = Tmax × 1,4 ≤ TP
Tsafe eff = Teff × 1,4 ≤ Tcw
nmax ≤ nlp
只有在使用未穩定化直流匯流排電壓的變頻器時,才需要轉速的安全係數。在本案例中,使用穩定化直流匯流排電壓 UDCL = 600 V 的變頻器。因此可不需轉速安全係數,且 nmax ≤ nlp 適用。若 nmax > nlp,可使用對應直流匯流排電壓下的扭矩–轉速特性曲線驗證 nmax 時的運轉點 Tsafe max。
計算結果得出下列馬達需求:
無安全係數:
- Tp = 133,68 Nm
- Tcw = 84,48 Nm
含安全係數:
- Tsafe max = 187,15 Nm
- Tsafe eff = 118,27 Nm
馬達 RIB17-3P-168x50-Z0.7(Tp = 233 Nm、Tcw = 123 Nm、nlp = 150 min⁻¹)完全滿足本範例計算的需求。
1.10.3 NC 旋轉台應用(NC rotary table applications)
對於水冷 NC 旋轉台應用,通常已知轉速 n、慣性矩 J、運動中的加工扭矩 TW 與零速扭矩 Tsw,以及 S1 運轉的角加速度 α 與 S6 運轉的 αmax。雖然扭矩的有效時間經常變動,但盡可能準確地將有效扭矩確定為連續扭矩、最大扭矩確定為最大扭矩,對於選擇最佳馬達並防止超過最大允許繞組溫度是必要的。
馬達運轉中發生的所有負載扭矩都納入扭矩計算中。
1.10.4 NC 旋轉台應用範例(Example of NC rotary table applications)
表 11:指定值
| 指定值 | 單位 | 數值 |
|---|---|---|
| 轉速 n | min⁻¹ | 60 |
| 慣性矩 J | kg·m² | 4 |
| 加工扭矩 TW | Nm | 300 |
| 摩擦扭矩 TF | Nm | 50 |
| 重力作用力(附加扭矩)TZ | Nm | 0 |
| S1 模式角加速度 αS1 | °/s² | 9000 |
| S6 運轉 3 s 最大角加速度 αmax | °/s² | 20000 |
| 安全係數 SF | – | 1,4 |
計算(Calculation)
角加速度換算為 rad/s²:
公式 19:角加速度(Angular acceleration)
αS1 = (π / 180) · αS1 [°/s²] = (π / 180) · 9000 = 157 rad/s²
公式 20:最大角加速度(Max. angular acceleration)
αmax = (π / 180) · αmax [°/s²] = (π / 180) · 20000 = 349 rad/s²
馬達選型依冷卻零速扭矩 Tsw、S1 運轉中運動扭矩 Tcw 與 S6 運轉 Tp 進行。安全係數 SF 為 1.4 可確保位置能可靠維持,且控制系統能安全地對偏差做出反應。
公式 21:冷卻零速扭矩(含水冷)(Cooled stall torque, with water cooling)
Tsw = ( TW + TF + TZ ) · 1,4 = 490 N
| 符號 | 單位 | 說明 |
|---|---|---|
| Tsw | Nm | 零速扭矩,冷卻(Stall torque, cooled) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 軸承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
公式 22:冷卻連續扭矩(含水冷)(Cooled continuous torque, with water cooling)
Tcw = ( J · αS1 + TW + TF + TZ ) · 1,4 = 1369 N
| 符號 | 單位 | 說明 |
|---|---|---|
| Tcw | Nm | 連續扭矩,冷卻(Continuous torque, cooled) |
| J | kg·m² | 慣性矩(Mass moment of inertia) |
| αS1 | rad/s² | S1 運轉之角加速度(Angular acceleration in S1 operation) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 軸承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
公式 23:峰值扭矩(Peak torque)
Tp = ( J · αmax + TW + TF + TZ ) · 1,4 = 2444 N
| 符號 | 單位 | 說明 |
|---|---|---|
| Tp | Nm | 峰值扭矩(Peak torque) |
| J | kg·m² | 慣性矩(Mass moment of inertia) |
| αmax | rad/s² | 最大角加速度(Max. angular acceleration) |
| TW | Nm | 加工扭矩(Processing torque) |
| TF | Nm | 軸承摩擦扭矩(Bearing frictional torque) |
| TZ | Nm | 重力作用力(附加扭矩)(Weight force / additional torque) |
計算結果得出下列需求:
- Tp = 2444 Nm
- Tcw = 1369 Nm
馬達 RIB13-3P-690×50-Z4.2(Tp = 3627 Nm、Tcw = 2166 Nm、nlp = 61 min⁻¹)完全滿足本範例計算的需求。
本範例使用速度控制。NC 旋轉台應先以定義的轉速起動。NC 旋轉台隨後以此轉速加工工件。
若另需定位作業(如位置控制中的回轉器),則 TP 時所需的轉速必須增加 10 % 至 20 % 的安全係數。馬達的極限轉速 nlp 必須大於計算所得轉速加上附加值的總和。
注意:本章所列數值、公式與範例皆取自 Schaeffler RE 1 型錄技術原理章節。具約束力的資料以報價及交貨圖面為準。如有更改,恕不另行通知。