Tổng quan: Ma trận RDDS1
Hệ thống dẫn động trực tiếp quay (Rotary Direct Drive System, RDDS) được thiết kế đặc biệt cho các ứng dụng định vị độ chính xác cao và động lực học cao, trong các lĩnh vực vận chuyển, sản xuất điện tử (productronics) và tự động hóa.
Ma trận kích thước RDDS1
Bảng dưới đây liệt kê bốn đường kính ngoài (130 / 160 / 180 / 230 mm) và các chiều cao H [mm] có sẵn tương ứng với từng đường kính.
| Dòng sản phẩm | RDDS1-130xH | RDDS1-160xH | RDDS1-180xH | RDDS1-230xH |
|---|---|---|---|---|
| Đường kính | 130 mm | 160 mm | 180 mm | 230 mm |
| Chiều cao có sẵn H [mm] | ||||
| 110 | 120 | 110 | 115 | |
| 135 | 145 | 137.5 | 140 | |
| 160 | 170 | 165 | 165 | |
| 185 | 195 | 192.5 | 190 |
Giải thích viết tắt
RDDS: Rotary Direct Drive System (Hệ thống dẫn động trực tiếp quay)
Tổng quan mô-men xoắn đỉnh và liên tục (không làm mát)
Bảng dưới đây liệt kê mô-men xoắn đỉnh Tp (Nm) và mô-men xoắn liên tục (không làm mát) Tc (Nm) của từng dòng sản phẩm theo các chiều cao khác nhau. Nền xanh lá (■) biểu thị mô-men xoắn đỉnh Tp; nền xám (■) biểu thị mô-men xoắn liên tục (không làm mát) Tc.
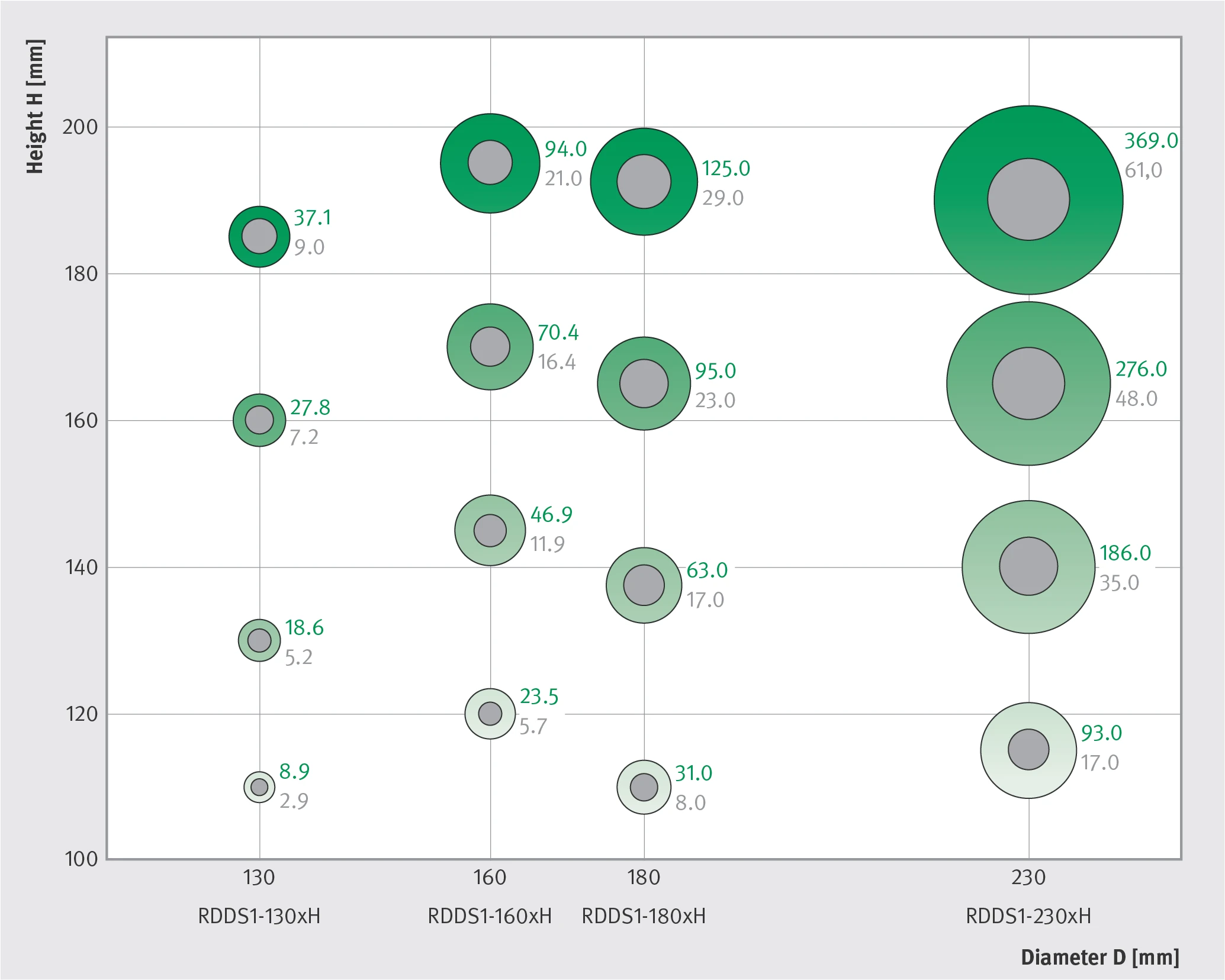
Ma trận mô-men xoắn đỉnh Tp (xanh lá) và mô-men xoắn liên tục Tc (xám) của RDDS1 (đường kính D so với chiều cao H)
| Chiều cao H [mm] | Đường kính 130 mm RDDS1-130xH | Đường kính 160 mm RDDS1-160xH | Đường kính 180 mm RDDS1-180xH | Đường kính 230 mm RDDS1-230xH | ||||
|---|---|---|---|---|---|---|---|---|
| Tp [Nm] | Tc [Nm] | Tp [Nm] | Tc [Nm] | Tp [Nm] | Tc [Nm] | Tp [Nm] | Tc [Nm] | |
| 110 / 120 / 110 / 115 | 8.9 | 2.9 | 23.5 | 5.7 | 31.0 | 8.0 | 93.0 | 17.0 |
| 135 / 145 / 137.5 / 140 | 18.6 | 5.2 | 46.9 | 11.9 | 63.0 | 17.0 | 186.0 | 35.0 |
| 160 / 170 / 165 / 165 | 27.8 | 7.2 | 70.4 | 16.4 | 95.0 | 23.0 | 276.0 | 48.0 |
| 185 / 195 / 192.5 / 190 | 37.1 | 9.0 | 94.0 | 21.0 | 125.0 | 29.0 | 369.0 | 61.0 |
Định dạng cột chiều cao: chiều cao tối thiểu đến tối đa cho từng đường kính (130 mm / 160 mm / 180 mm / 230 mm), liệt kê theo thứ tự.
Chú giải
Xanh lá (Green): mô-men xoắn đỉnh Tp [Nm]
Xám (Grey): mô-men xoắn liên tục (không làm mát) Tc [Nm]
Nếu bạn cần mô-men xoắn liên tục (không làm mát) Tc cao hơn, vui lòng liên hệ với chúng tôi.
Đặc tính mô-men xoắn – tốc độ quay (Torque-Rotary Speed Characteristic)
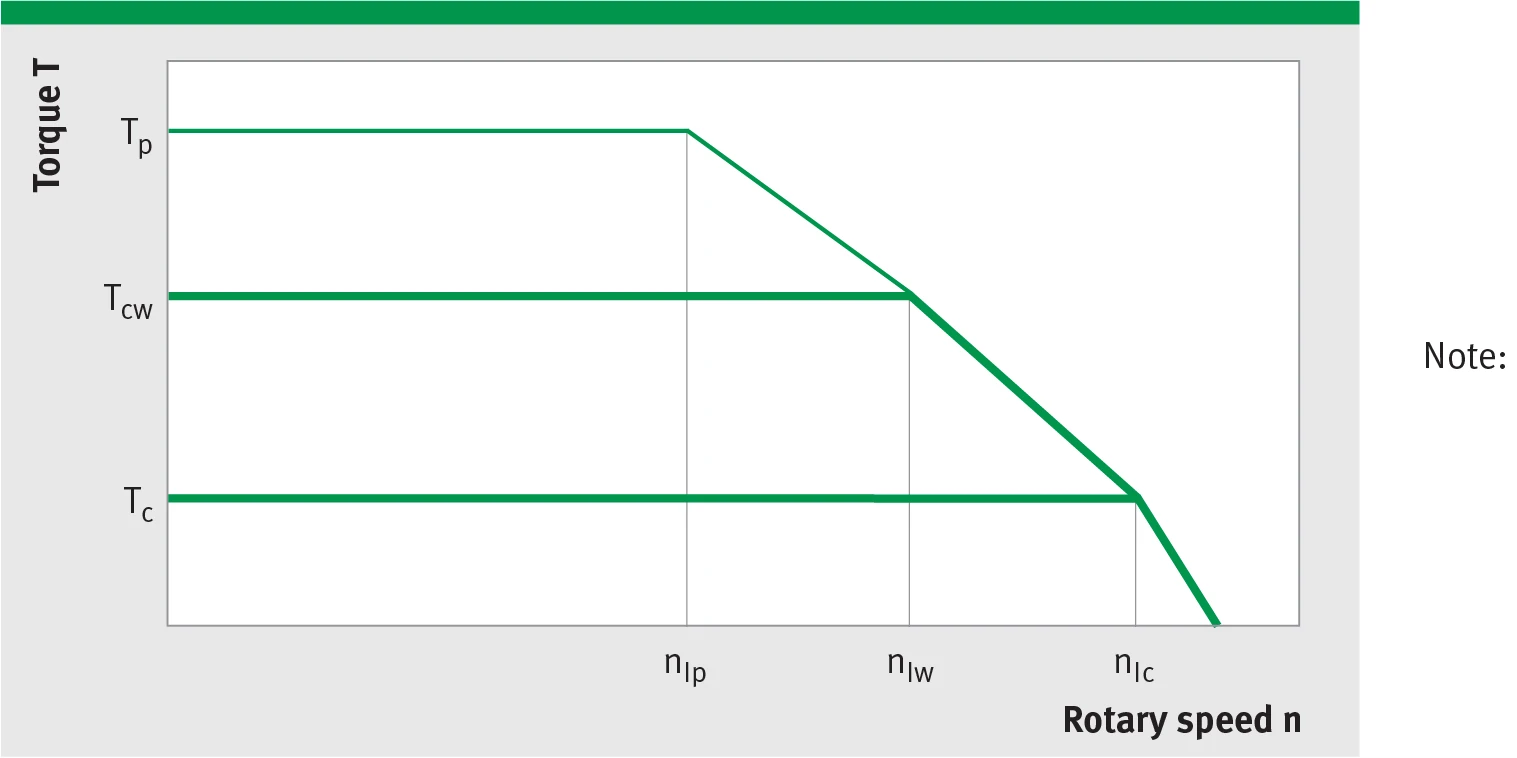
Sơ đồ đặc tính mô-men xoắn – tốc độ quay (Tp: mô-men xoắn đỉnh; Tcw: mô-men xoắn liên tục có làm mát; Tc: mô-men xoắn liên tục; nlp / nlw / nlc: các tốc độ giới hạn tương ứng)
Tốc độ giới hạn bị hạn chế bởi ổ bi (bearing), hệ thống đo lường (measuring system) hoặc bản thân động cơ. Tốc độ tối đa được ghi rõ trong bảng dữ liệu (data sheet) của từng dòng sản phẩm.
Lưu ý (Note): Khi điện áp DC link UDCL thấp hơn, tốc độ giới hạn của động cơ giảm gần như tỷ lệ thuận. Cần lưu ý điều này khi lựa chọn phiên bản cuộn dây (winding).
Giới hạn tốc độ theo từng loại cuộn dây gần như tỷ lệ thuận với UDCL.
Việc vận hành liên tục của các động cơ này có thể bị hạn chế trong vùng xung quanh tốc độ tới hạn ncr do các tổn thất phụ thuộc tần số (frequency-dependent losses, xem glossary). Khi đó cần giảm thêm chu kỳ làm việc (duty cycle) hoặc dòng điện.
Đặc tính mô-men xoắn – dòng điện (Torque-Current Characteristic)
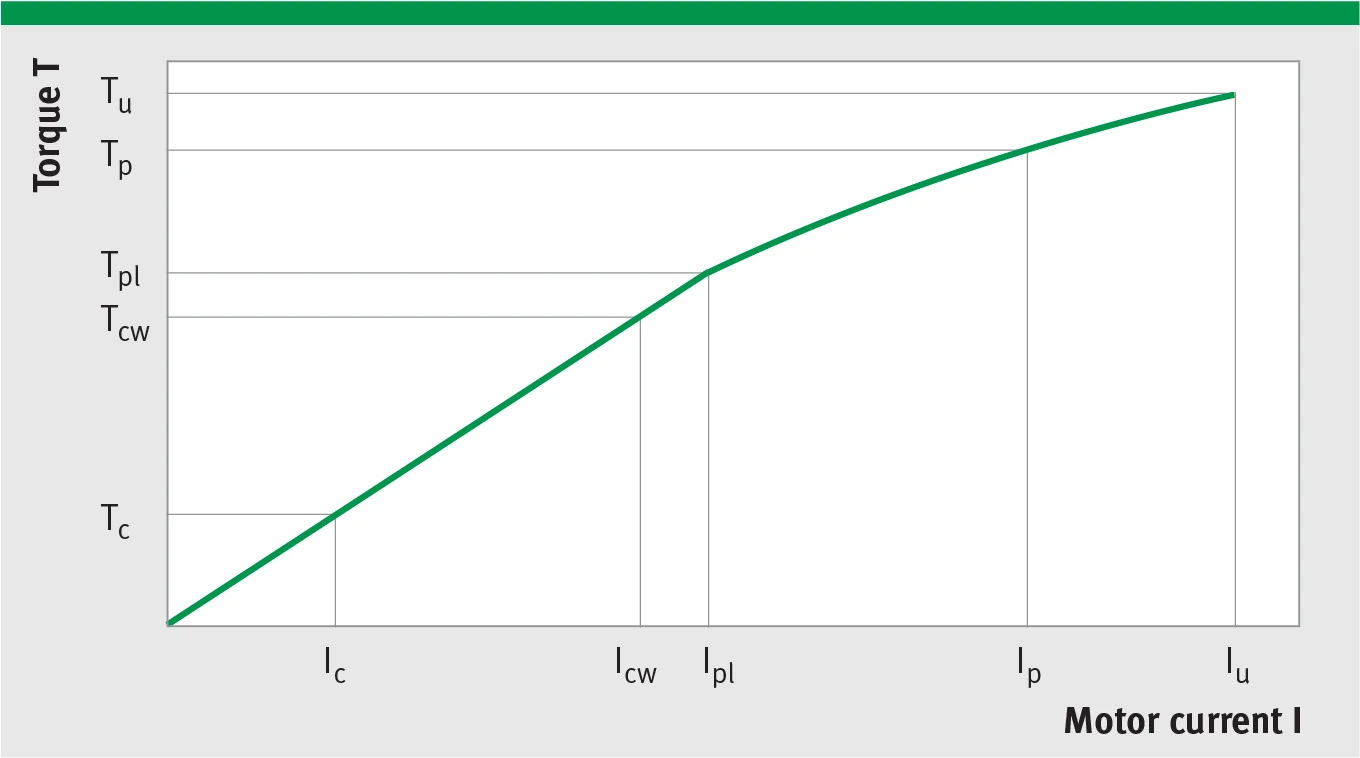
Sơ đồ đặc tính mô-men xoắn – dòng điện (Tc, Tcw, Tpl, Tp, Tu với dòng điện tương ứng Ic, Icw, Ipl, Ip, Iu; đường cong thể hiện hành vi phi tuyến do bão hòa từ)
Hành vi bão hòa (Saturation Behavior)
Mô-men xoắn tăng tuyến tính theo dòng điện hiệu dụng (effective current) ban đầu; sau đó đi vào vùng uốn cong (bent part), mức tăng mô-men xoắn chậm lại, rồi tiếp tục tăng tuyến tính ở mức độ thấp hơn.
Điểm uốn cong này xuất phát từ hiện tượng bão hòa từ (magnetic saturation) của toàn bộ mạch từ (magnetic circuit).