3.1.1 量测系统分类
不同类型的量测原理
工业应用中的线性距离量测使用了多种高精度距离测量系统。 根据物理量测原理的不同,可将这些系统分为不同的类别。
磁阻式系统
使用 MR 感测器或霍尔效应感测器记录标尺磁化的周期性变化。 与光学系统不同,磁性系统不受污垢影响。 典型的栅距周期在 0.4 至 10 mm 之间。
光学式系统
使用感测器扫描栅距,记录反射/透射光亮度或相位的周期性变化。 可实现周期小于 10 µm 的极细栅距, 提供最高的分辨率。
电感式系统
采用机械结构化的金属标尺,设计极为坚固。 这些条带像变压器铁芯一样工作。 难以实现低于 1mm 的栅距周期。
直接量测与间接量测
驱动元件与量测系统元件如何协同工作至关重要。 根据作用原理的不同,我们区分间接量测和直接量测。
间接量测
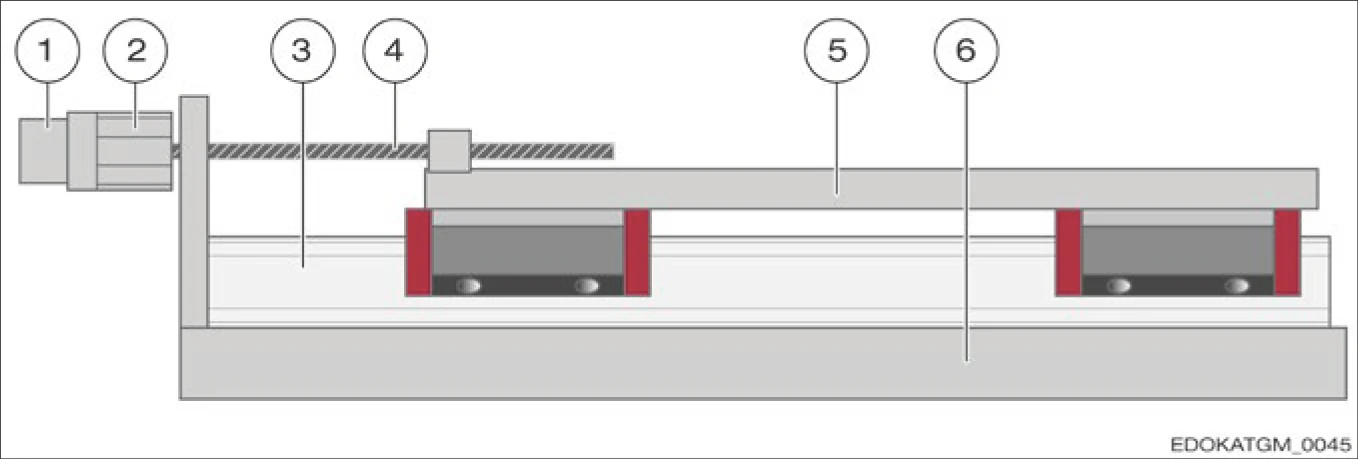
Linear guideway without integral positioning measurement system
无整合式定位量测系统的直线导轨
元件:
- 线性位移转换为其他量测值
- 范例:滚珠丝杠配旋转编码器
- 优点:成本低且结构紧凑
- 缺点:转换过程会引入误差
直接量测(MONORAIL AMS)
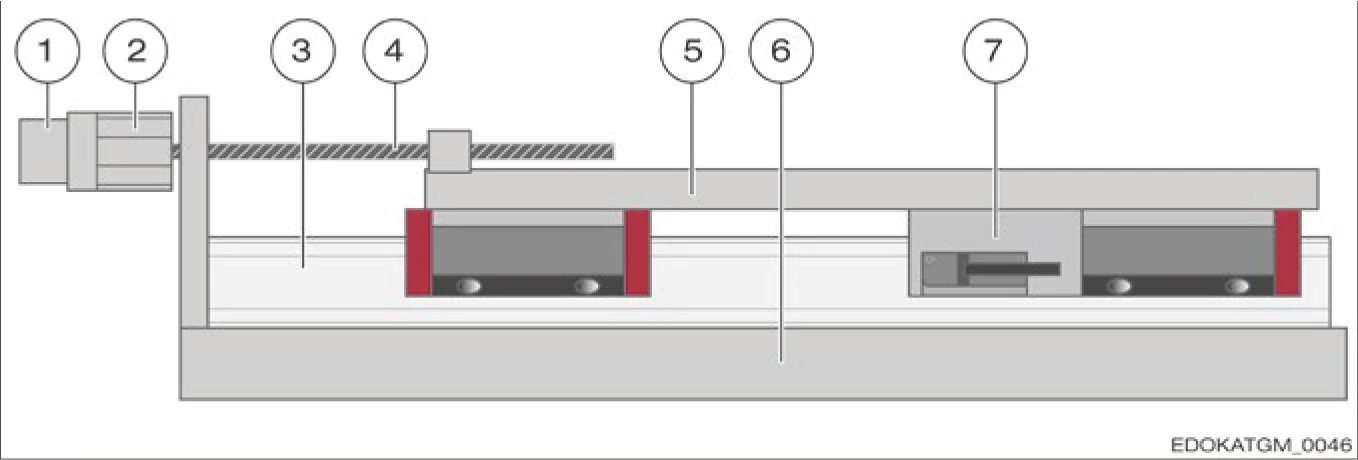
Linear guideway with integral positioning measurement system (MONORAIL AMS)
带整合式定位量测系统的直线导轨(MONORAIL AMS)
元件:
- 量测系统整合于直线导轨中
- 读数更准确
- 较少受环境因素影响
- 推荐用于精密应用
3.1.2 距离量测原理概览
| 距离量测原理 | 光学式 | 磁阻式 | 电感式 |
|---|---|---|---|
| 分辨率 (Resolution) | ● ● ● | ● ● ● | ● |
| 易于整合 (Ease of integration) | ● | ● ● ● | ● ● ● |
| 抗污性 (Sensitivity to dirt) | ● | ● ● | ● ● ● |
| 安装空间 (Installation space) | ● | ● ● ● | ● ● ● |
| 安装 (Installation) | ● ● | ● ● ● | ● ● ● |
● = 尚可 (Satisfactory), ● ● ● = 非常好 (Very good)
3.1.3 磁阻式量测技术
磁阻效应
所有磁阻效应都基于铁磁性薄层因外部磁场而改变其欧姆电阻的事实。 SCHNEEBERGER 距离测量系统中的感测器使用各向异性磁阻效应(AMR 效应)。
三种已知效应
- AMR(各向异性磁阻)- SCHNEEBERGER 采用
- GMR(巨磁阻)
- TMR(穿隧磁阻)
SCHNEEBERGER 距离测量系统中的感测器使用各向异性磁阻效应(AMR 效应), 该效应由 Thomson 于 1857 年在铁磁材料中发现。 当导体中的电流方向与磁化方向平行时,其电阻会比电流方向与磁化方向垂直时增加几个百分点。
利用铁磁材料薄层,可以通过外部磁场定向其内部磁场来制造磁场感测器。 外部磁场移除后,内部磁场会保持定向。这是铁磁材料的基本特性。
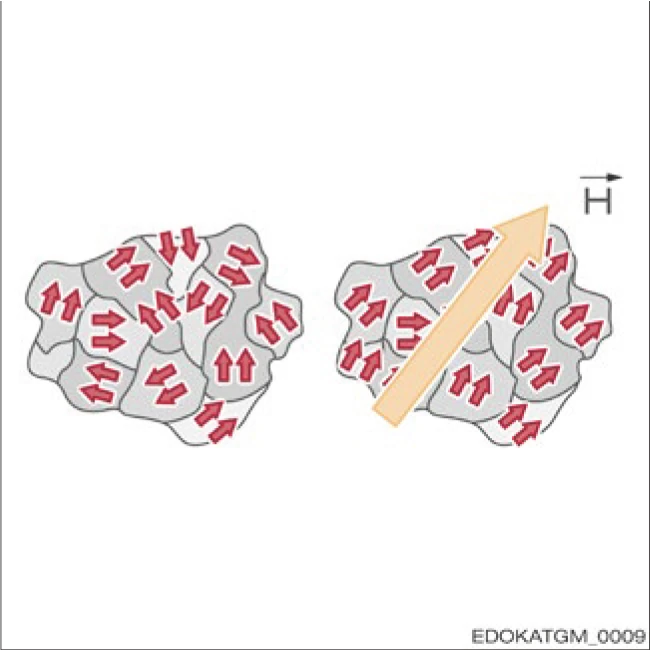
Weiss domains orientation
魏斯磁域定向
魏斯磁域定向
Magnetic regions (Weiss domains) are oriented on the external magnetic field.
磁性区域(魏斯磁域)根据外部磁场定向。
物理现象:
- 外部磁场 H⃗r 作用于材料
- 磁域自发定向排列
- 磁化方向影响电阻值
- 形成磁阻效应的物理基础
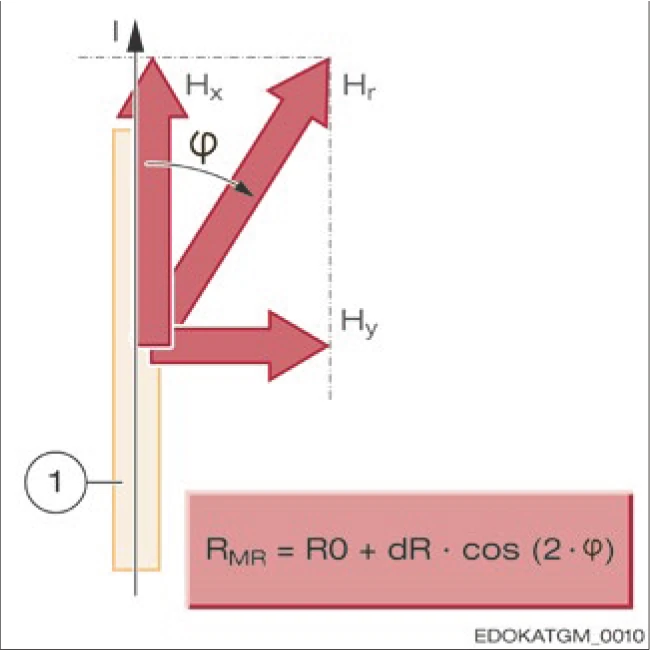
Principle of magneto-resistive sensor with MR strips
采用 MR 条带的磁阻感测器原理
MR 条带电阻变化原理
(Intrinsic magnetization of the strip, mainly due to form anisotropy)
(Angle between magnetization and direction of current flow)
电阻公式:RMR = R0 + dR · cos(2·φ)
MR 条带特性
磁阻式增量感测器
由於单个 MR 条带的电阻会受到温度变化和磁干扰场的影响,通常使用四个条带作为感测器, 配置为惠斯登电桥。其特点是所有四个电阻的相同变化(例如由于温度上升)不会在输出端产生电压差。 为了实现可量测的效果,电阻必须适当地偏转,例如电阻 1 增加、2 减少、3 增加、4 减少。 这可以通过在周期性磁化中适当定位 MR 条带来实现。
由此可知,每个感测器都适配于其磁化的刻度周期,并且只能与该周期配合使用。 此外,MR 条带不是单独设计的,而是多个条带的串联开关,每个条带彼此相距一个磁周期。 我们称之为等效位置。这样可以获得标尺在磁化强度和极长度方面的平均变化。
基于感测器的二次特性曲线(量测磁场强度值),可以获得磁刻度周期长度一半的初始讯号。 MONORAIL AMS 感测器的磁刻度为 400 µm,因此电信号周期为 200 µm。
最后,将两个相同的结构偏移 1/4 信号周期(50 µm),从而获得正弦和余弦讯号, 借此可以量测运动方向和行程距离。
完整的示意性感测器结构如下所示:
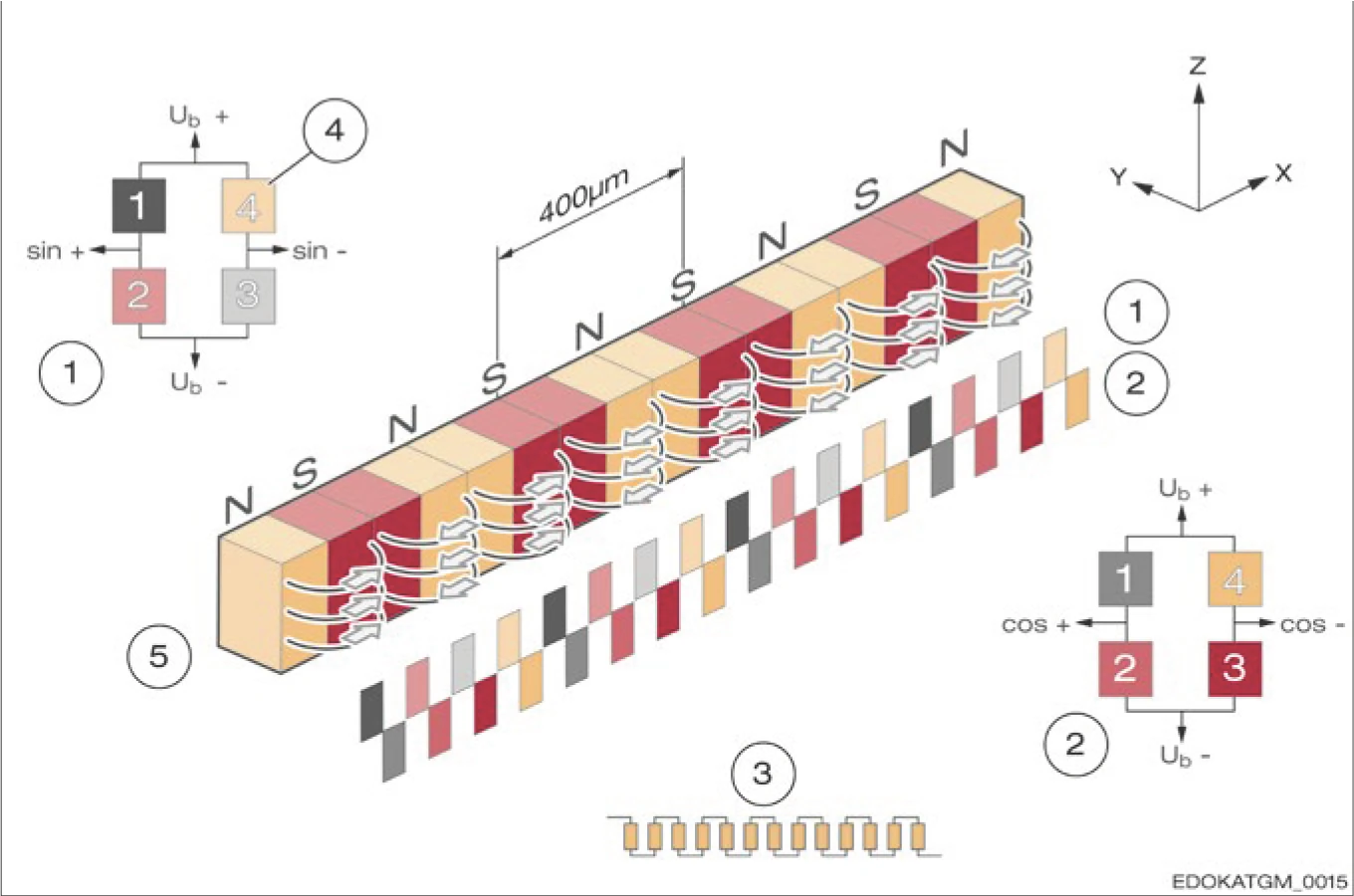
Schematic structure of sine and cosine sensors
正弦和余弦感测器的示意结构
元件说明:
物理配置:
由于两个讯号来自量测标尺上的相同位置,因此这种感测器对横向和旋转位移非常不敏感。 在实务上,这导致周期性量测变化具有稳定的特性。 标尺的场强度在 y 方向上从标尺变化。 这导致磁场在距离标尺很远的地方相互抵消。 在近距离范围内,距离约为一个周期长度,但磁场强度随著 y 方向的距离呈指数下降。
磁性标尺
SCHNEEBERGER 制造整合量测标尺的成型轨导轨。磁场周期性变化 (N-S-N-S-N-S...)的磁性标尺可与 MR 感测器配合实现增量距离量测。
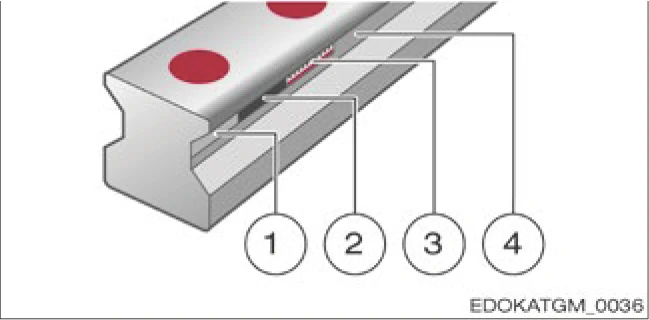
Construction of magnetic scale in profile rail
成型轨导轨中磁性标尺的构造
磁性标尺结构:
系统元件
完整功能的 AMS 系统包含:
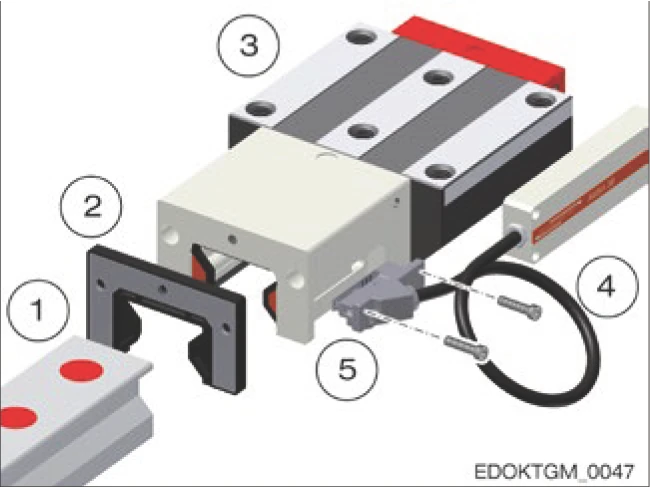
Complete AMS measuring system components
完整的 AMS 量测系统元件
- 导轨,整合量测标尺
- 附件,用于安装和连接
- 量测滑座,作为完整单元
- 螺钉,用于读头安装
- 读头,包含感测器和电子元件
量测滑座由一个 MONORAIL 滑座组成,其一侧安装了外壳。 外壳包含带有支撑表面的切口,用于安装读头。 读头用螺钉固定在外壳上,因此易于更换。
接触式采样
为了正确处理增量讯号,需要在感测器和量测标尺之间保持一致的工作距离。 由于这个小公差无法通过刚度调整结构实现,因此 AMS 距离测量系统采用接触滑动量测原理。
MR 感测器封装在滑靴外壳中,通过叶片弹簧保持水平位置, 并由压缩弹簧压在量测标尺上。滑靴外壳具有磨削的滑动表面, 通过这些表面设定并保持感测器与量测标尺之间的恒定工作距离。
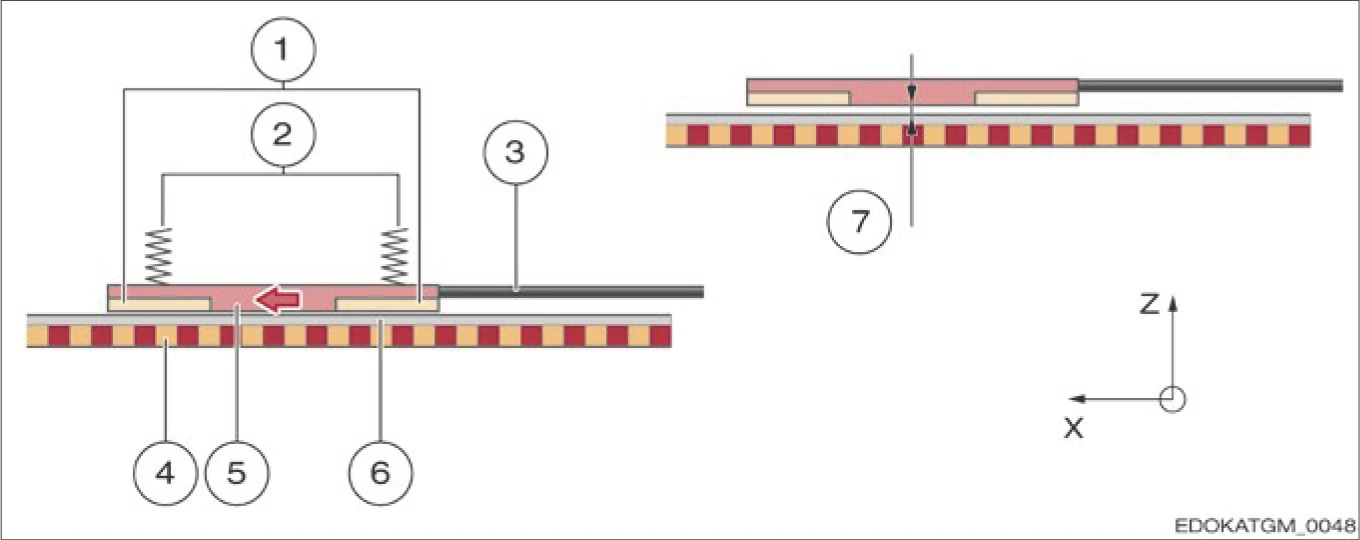
Contact sampling assembly for AMS distance measuring systems
AMS 距离测量系统的接触式采样组件
元件说明:
滑靴也形成刮片边缘,较大的颗粒和液体无法通过。 此外,上述外壳的刮片必须完好无损,以确保接触式采样的有效运行条件。
这种结构确保所有易损零件和特定电子元件都在读头中。 由于侧面安装,读头可以非常容易地更换。 小的制造公差确保读头可以在现场轻松更换,而带有标尺的导轨保持不动。
3.1.4 距离测量系统
内插
对于距离量测应用,内插是指将类比输入讯号转换为具有较小信号周期的数位输出讯号。 这是必要的,因为无法直接从类比讯号产生计数器读数和/或位置读数。
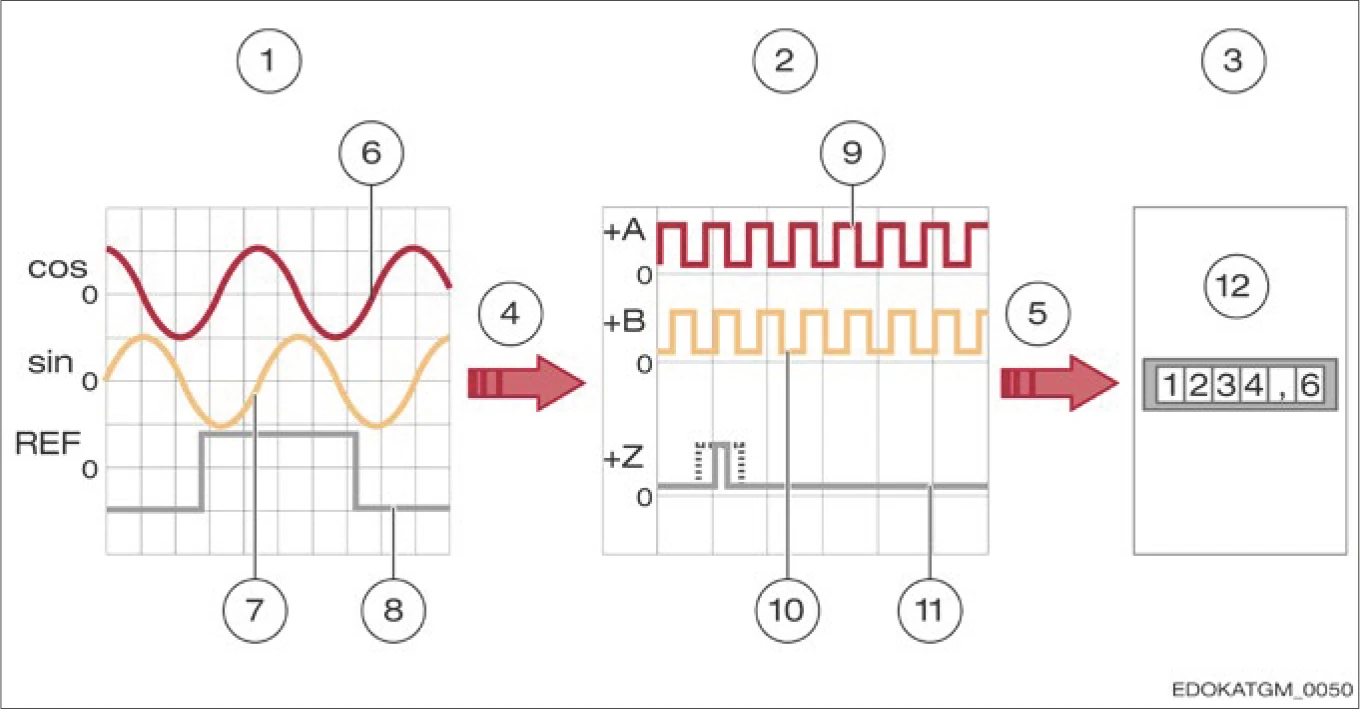
The analogue input signals (sin, cos, Ref) are interpolated (red arrow) with the digital output signals (+A, +B, +Z). Inverted signals are not represented.
类比输入讯号(sin、cos、Ref)通过内插(红色箭头)产生数位输出讯号(+A、+B、+Z)。反相讯号在此图中未显示。
Analogue input signal: sin, cos, REF
Analogue input signal (sin)
Digital output signal: +A, +B, +Z
Analogue input signal (REF)
Downstream electronics
Digital output signal (+A)
Interpolation
Digital output signal (+B)
Signal transmission
Digital output signal (+Z)
Analogue input signal (cos)
Measuring counter, PC, controller for machine etc.
为此,内插倍率定义了类比输入讯号与数位输出讯号的信号周期比率。
讯号传输与评估
Signal transmission and evaluation
数位讯号由两个增量讯号 +A 和 +B 以及参考讯号 +R 组成,传输至下游电子元件。 这可以是简单的量测计数器、PC 或机器控制器。 下游电子元件通过计数讯号边缘从数位讯号中确定位置值。 计数方向由相关通道的电平决定。根据评估多少个边缘,我们称之为:
单边缘评估
仅计数一个通道的一个边缘。一个量测步进 = 一个数位信号周期。
双边缘评估
计数一个通道的上升和下降边缘。一个量测步进 = 半个信号周期。
四边缘评估
计数两个通道的所有边缘。一个量测步进 = 四分之一信号周期(最高分辨率)。
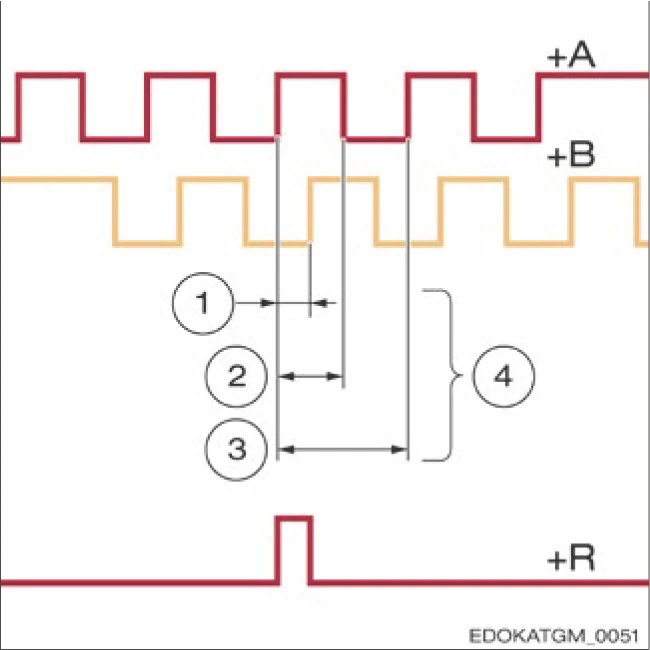
Comparison of edge evaluation methods
边缘评估方法比较
振幅控制(AGC - 自动增益控制)
振幅控制是指 SCHNEEBERGER AMS 评估电子元件调整输出振幅至特定值的功能。 在 AMS 系统中,正弦和余弦讯号的瞬时值会被数位化,并据此计算振幅。 计算值会与标称值进行比较,并相应调整 MR 感测器的桥接电压 Ub。 结果会获得稳定的电压输出值。调整后会产生新的更佳瞬时值。
MONORAIL AMS 规格
- 控制时间:2 kHz 至 10 kHz 之间
- 自动调整桥接电压以维持稳定输出
- 持续优化讯号品质
电源感测功能(Power Sense Function)
所有 AMS 产品都配备电源感测线(参见引脚布局供电电压反馈), 用于补偿长电源供应线路中的电压降。 如果所使用的控制器支援此功能,我们建议使用它以保证读头的功能可信赖性。
主要特点
- 所有 AMS 产品均整合电源感测线
- 补偿长电源线路的电压降
- 提高读头的功能可信赖性
- 选配功能(需要控制器支援)
精度等级(Accuracy Class)
精度等级指定了系统在规定操作条件下的最大预期量测偏差。 精度等级为 5 µm 的距离测量系统允许 ±5 µm 的偏差。 为了便于比较,精度等级是以 1 公尺的参考长度为基准来规定的。
关键概念
- 定义:最大预期量测偏差
- 条件:在规定的环境条件下运作
- 范例:5 µm 精度等级 = ±5 µm 偏差
- 参考长度:1 公尺(用于规格制定)
分辨率(Resolution)
分辨率描述量测系统中可能量测到的最小位置变化。 它由类比信号周期、内插倍率和评估程序(积分时间或取样率)决定。 例如,在内插倍率设定为 100 且输入信号周期为 200 µm 的情况下, 输出信号周期为 2 µm,根据控制器中的四边缘评估,分辨率为 0.5 µm。
分辨率计算
- 取决于:类比信号周期 × 内插倍率 × 评估方法
- 范例:200 µm 讯号 × 100 内插 = 2 µm 输出讯号
- 四边缘评估:2 µm ÷ 4 = 0.5 µm 分辨率
取样率(Sampling Rate)
取样率描述每个时间间隔内对类比讯号进行取样的频率。 通常时间间隔为一秒,因此取样率的单位为 Hz。 根据奈奎斯特-夏农定理(Nyquist-Shannon Theorem), 取样频率应至少是原始讯号频率的两倍,以保证能够近似完整地重现原始讯号。
关键原理
- 定义为:每个时间间隔的频率
- 标准单位:Hz(每秒样本数)
- 奈奎斯特-夏农定理:取样频率 ≥ 2 × 讯号频率
- 确保:准确的讯号重现
反向误差/迟滞(Reversal Error/Hysteresis)
如果使用适当的测试设定在每种情况下交替进行相反方向的重复定位精度量测, 则可以发现距离测量系统在从右侧接近和从左侧接近之间的平均位置差异。 这种差异称为反向误差或迟滞。SCHNEEBERGER 在其技术资料表中规定了此值。 单向重复定位精度通常明显低于规定的迟滞值。
重复定位精度(Repeatability)
量测系统的单向重复定位精度通常被理解为特定系统在完全相同的环境条件下重复结果的能力。 在这种评估中,必须知道量测误差并将其纳入分析。 机床的重复定位精度可以使用简单的方法针对特定位置和特定行进方向进行测定。 在评估重复定位精度时,会完成许多量测,并计算算术平均值和标准偏差。
Hysteresis and repeatability measurement diagram
迟滞与重复定位精度量测示意图
量测示意图:
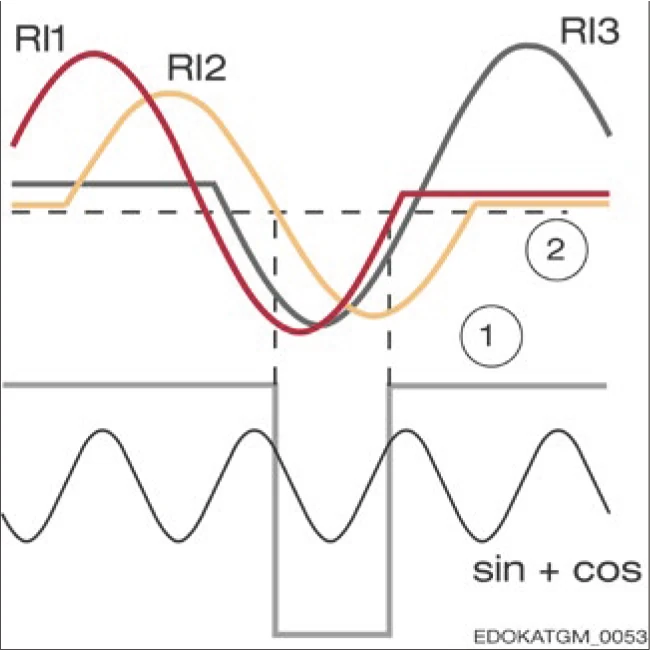
参考点定位(Referencing)
增量式测量系统(例如 AMS-3B 和 AMS-4B)在开机后无法确定绝对位置, 因此在增量轨道上增加了另一条磁轨,即参考轨道。 可以在此参考轨道上设置个别参考点、参考点网格或距离编码参考点。 需要进行参考移动以参考系统。
然后计数器可以使用参考讯号将内部计数器修改为指定值。 在此过程中,计数器会识别增量讯号彼此之间的预定义位置, 这通常是 SIN = COS 且两者都大于零,作为附加资讯 REF = "high"。 下图显示了反相讯号路径,这意味著说明了讯号的负值。
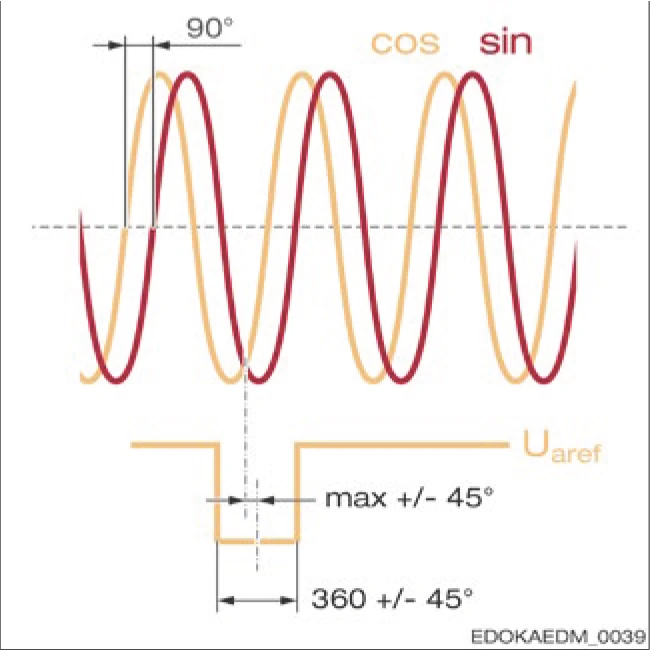
Reference signal interfaces (analogue voltage)
参考讯号接口(类比电压)
参考讯号识别
- SIN = COS 讯号关系
- 两个讯号都大于零
- REF 讯号 = "high"
- 需要参考移动以建立位置
- 类比电压接口:TSU/TRU/TMI
- 信号周期:200 µm
个别参考点(Individual Reference Point)
个别参考点代表参考轨道的最简单功能,它可以设置在标尺上的任何位置。 在 SCHNEEBERGER 中,一个参考点由三个磁性参考标记组成, 这些标记使用一个单独的 MR 桥接器进行采样,无需平均。 一个参考资料代表参考脉冲的上升沿,另一个代表下降沿。 第三个参考资料是冗余的,用于提高参考点识别系统的操作可信赖性。
Reference point identification system
参考点识别系统
系统元件:
参考点网格(Reference Point Grid)
在参考点网格的情况下,多个参考点沿标尺以相等距离设置。 客户从这些参考点中选择一个用于轴的参考。
与个别参考点相比,网格的优势首先是通过有针对性地应用外部附加元件 (凸轮、接近开关等)缩短了参考行程, 但也能够在一个导轨上操作多个量测滑座。 为此,沿标尺的各个参考点会分配给不同的量测滑座以进行相关的参考。
相对于个别参考点的优势
- 减少参考行程距离
- 多滑座支援能力
- 灵活的选择选项
- 与机器自动化更好地整合
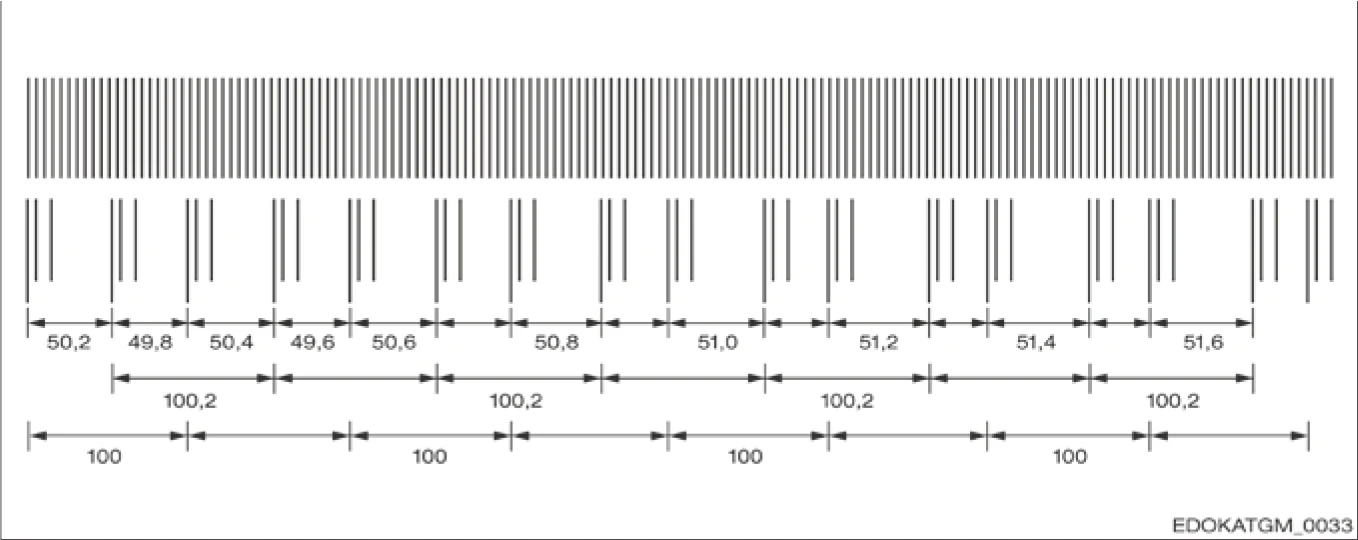
距离编码(Distance Coding)
在距离编码参考点的情况下,它们在标尺上的排列使得两个参考点之间的每个间距仅出现一次。 例如,如果您在距离测量系统的导轨上越过三个参考点, 控制器就能够计算出绝对位置。这代表了一种工业标准,受到许多控制器制造商的支援。
值 100 通常被指定为基准周期,代表在最坏情况下需要行进的距离才能完成参考。 基准周期决定了最大可编码长度。对于短轴,选择较小的基准周期是明智的,以减少最大必要行程距离。
因此,SCHNEEBERGER 为其 AMS 产品提供具有不同基准周期的客户专用距离编码参考点。
Distance coding principle diagram
距离编码原理示意图
绝对编码(Absolute Coding)
对于绝对量测系统,使用具有绝对编码的轨道代替参考轨道。 这种编码系统要么以串列方式施加在一条轨道上,要么以并列方式施加在多条轨道上。 理论上,应该可以仅使用此轨道来量测距离,但由于此代码的分辨率相对较小, 绝对编码轨道通常与增量轨道结合使用。 因此,绝对代码定义量测系统所在的信号周期, 该信号周期内的精细分辨率是通过内插增量讯号获得的。
以下图形提供了编码系统的范例:
串列编码 (Serial-coded)
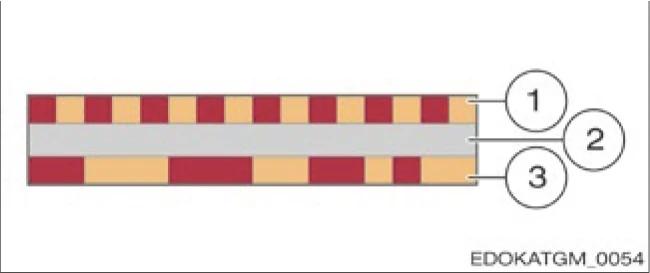
Serial-coded interpolation track
串列编码内插轨道
元件说明:
并列编码 (Parallel-coded)
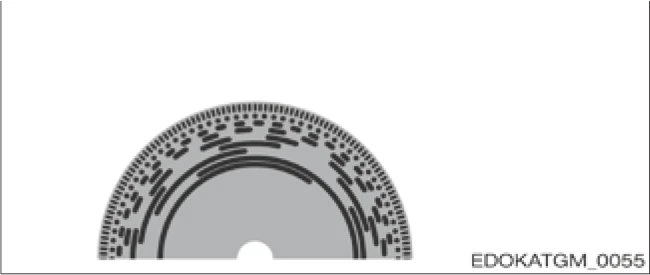
Parallel-coded pulse disc
并列编码脉冲盘
特点:
在串列编码轨道的情况下,只能通过比较两个连续信号周期来确定绝对位置。 因此,尽管事实上绝对位置是已知的,但正在使用两种不同的程序。
一种可能性是使用感测器,这些感测器相应地较长,以便它们覆盖必要的代码来确定绝对位置。 因此,它们能够在任何位置直接确定绝对位置。
另一种可能性是在双通道基础上建构评估电子元件。 即使在机器关闭时,其中一个通道也始终运作(电池缓冲),并确定轴的任何位置变化。 当机器开启时,此低分辨率位置资讯会与来自另一个通道的高分辨率位置资讯结合,以实现正确的绝对位置。
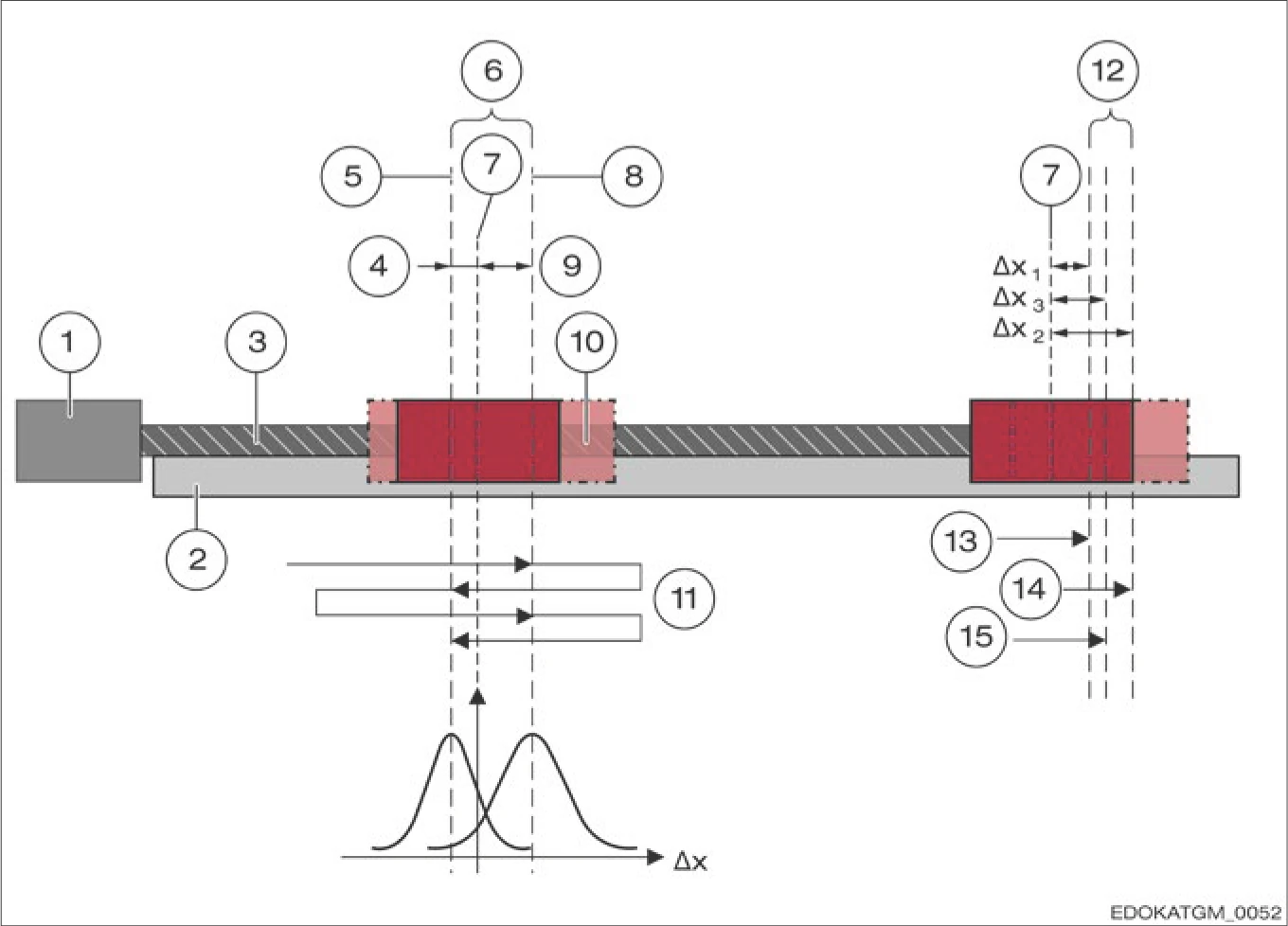
SCHNEEBERGER 使用电池缓冲扫描进行绝对位置确定。 为此目的,在导轨上施加一条特殊的距离编码参考轨道作为绝对轨道。 量测系统在此过程中确定三个相邻参考标记之间的距离, 并通过将确定的值与储存的矩阵匹配来确定瞬时绝对位置。 在此范例中,读头经过三个标记的参考标记,并确定其间距「1」(代码 Y)和「5」(代码 X)。 然后可以在二维矩阵中为这两个量测值分配绝对位置「Pos 1:5」。
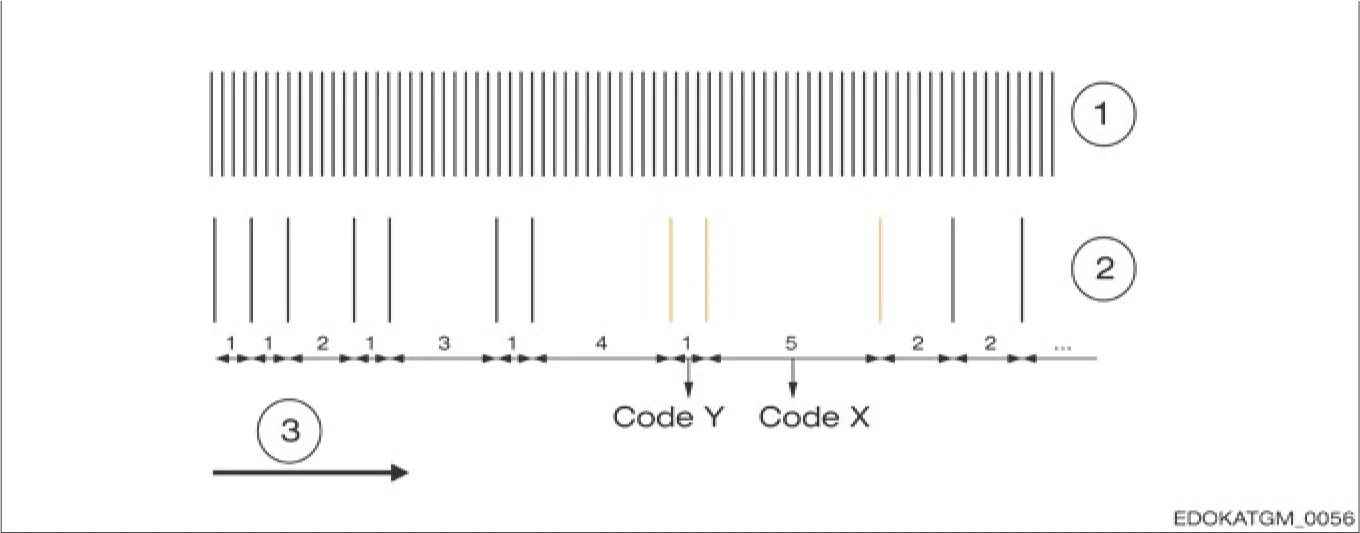
Example for determining position by means of battery-buffered scanning
通过电池缓冲扫描确定位置的范例
示意图元件:
一维距离量测偏差
One-dimensional distance measuring deviation
二维矩阵
Two-dimensional matrix
| 代码 Y/代码 X (Code Y/Code X) | 1 | 2 | 3 | 4 | 5 | ... |
|---|---|---|---|---|---|---|
| 1 | Pos 1;1 | Pos 1;2 | Pos 1;3 | Pos 1;4 | Pos 1;5 | ... |
| 2 | Pos 2;1 | Pos 2;2 | Pos 2;3 | Pos 2;4 | Pos 2;5 | ... |
| 3 | Pos 3;1 | Pos 3;2 | Pos 3;3 | Pos 3;4 | Pos 3;5 | ... |
| 4 | Pos 4;1 | Pos 4;2 | Pos 4;3 | Pos 4;4 | Pos 4;5 | ... |
| 5 | Pos 5;1 | Pos 5;2 | Pos 5;3 | Pos 5;4 | Pos 5;5 | ... |
| ... | ... | ... | ... | ... | ... | Pos Y;X |
为了鉴定量测标尺,SCHNEEBERGER 采用支援「VDI/VDE 2617 使用 DIN EN ISO 10360-2 检查距离量测的准则」的程序。 在此过程中,重点在于为客户在技术规格方面获得最高可能的效益。 技术资料使用三种不同的距离量测偏差规格:
- 周期偏差 (Periodic deviation)
- 40 mm 路径的距离量测偏差 (Distance measuring deviation over a 40 mm route)
- 1 m 路径的距离量测偏差 (Distance measuring deviation over a 1 m route)
为了保障标尺的品质,建立了允许偏差的极限曲线。 极限曲线和客户通常使用的不同参考长度的量测偏差已在图表中列出。
因此,允许在 SCHNEEBERGER 量测系统的规格之间进行内插。
周期偏差(Periodic Deviations)
所有增量距离测量系统都伴随著周期偏差的影响,其波长恰好对应于刻度间距或刻度间距的分数。 这种周期偏差或短波偏差是由于感测器或电讯号处理的小偏差而产生的。 正弦和余弦讯号因此偏离数学精确形式。偏差可以根据排列(谐波)进行分类。
| KWF 周期 (KWF Period) | 偏差原因 (Deviation occurs due to) |
|---|---|
| 1 个信号周期 (1 signal period) | 正弦/余弦偏移 (Sine/cosine offset) |
| 1/2 信号周期 (1/2 signal period) | 正弦和余弦振幅不同 (Sine and cosine amplitude are different) |
| 1/3 - 1/8 信号周期 (1/3 - 1/8 signal period) | 感测器提供的讯号与正弦波形状基本不同 (Sensors deliver a signal fundamentally different from sine wave shape) |
内插误差(Interpolation Error)
如果周期偏差仅在数位化和位置计算期间发生,则我们称之为内插误差。 在某些情况下,当发射器和接收器电路彼此不精确匹配时,这很容易发生。
比较器误差 / Abbe 误差(Comparator Error / Abbe Error)
比较器误差,也称为 Abbe 误差,是一种系统性偏差, 当长度标准的轴与距离标准的轴不重合时发生。 偏差的原因是轴设计中的微小旋转运动,这会影响量测结果。
绝对位置确定方法总结
1. 基于感测器的方法:
- 长感测器覆盖必要的代码
- 直接确定绝对位置
- 无需顺序周期比较
2. 双通道电池缓冲方法:
- 一个通道始终运作(电池缓冲)
- 第二个通道在供电时高分辨率
- 机器关机时位置追踪能力
- 在机器启动时结合低分辨率和高分辨率