5 调试
5.1 讯号传输
为提高抗杂讯能力,我们建议使用符合 RS-422 标准的差动讯号。以反相讯号相位的平衡讯号传输可以有效防止干扰。几乎所有现代驱动控制器都支持此选项。
双绞线用于传输讯号(A+、B+、R+)及对应的反相讯号(A-、B-、R-)。在接收端,通过取两个讯号电位之差来生成讯号。
使用单端讯号传输时,讯号电位相对于参考电位变化。这种讯号传输方式更容易受到干扰。此情况下的讯号振幅为差动传输讯号的一半。
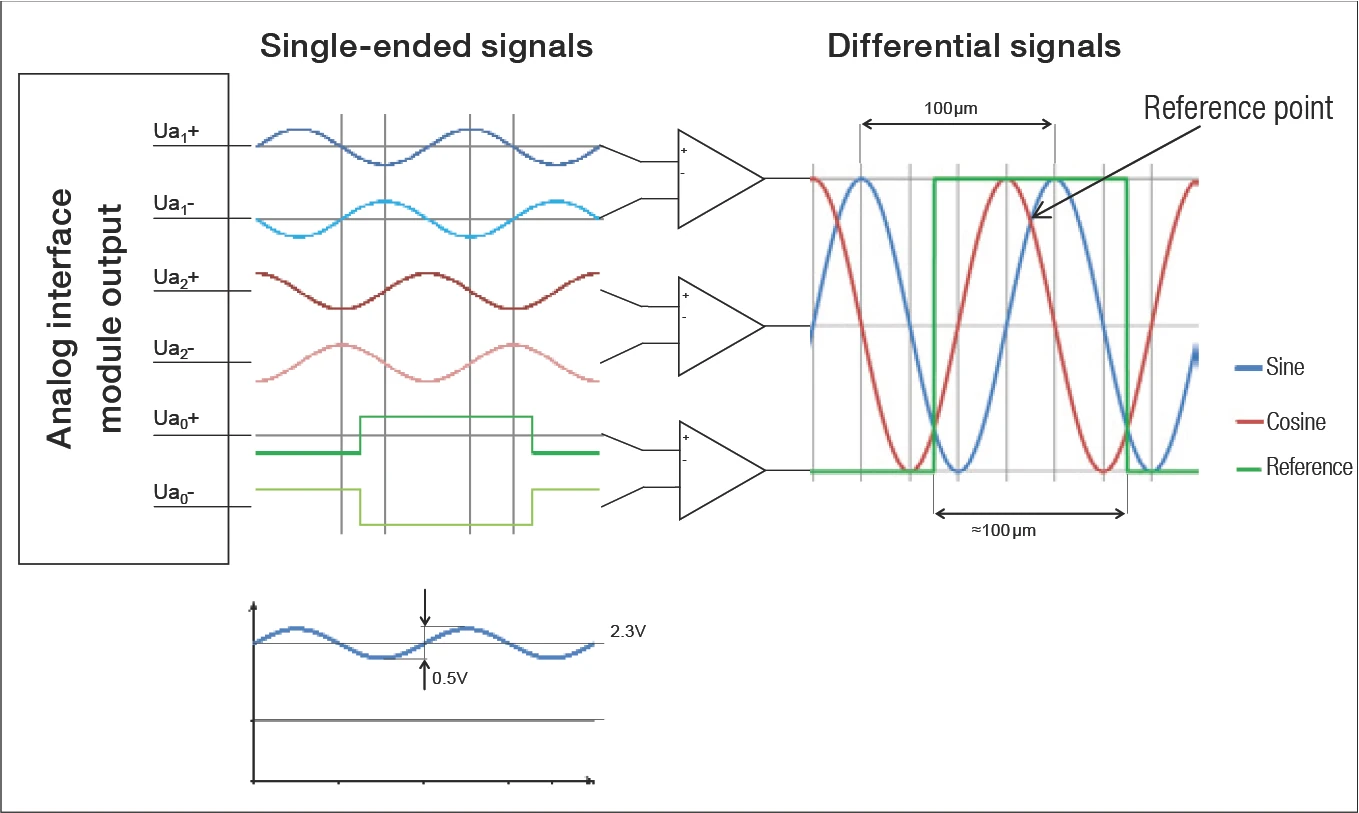
接口模组的模拟输出讯号。可以单端(参考接地)或差动方式使用。
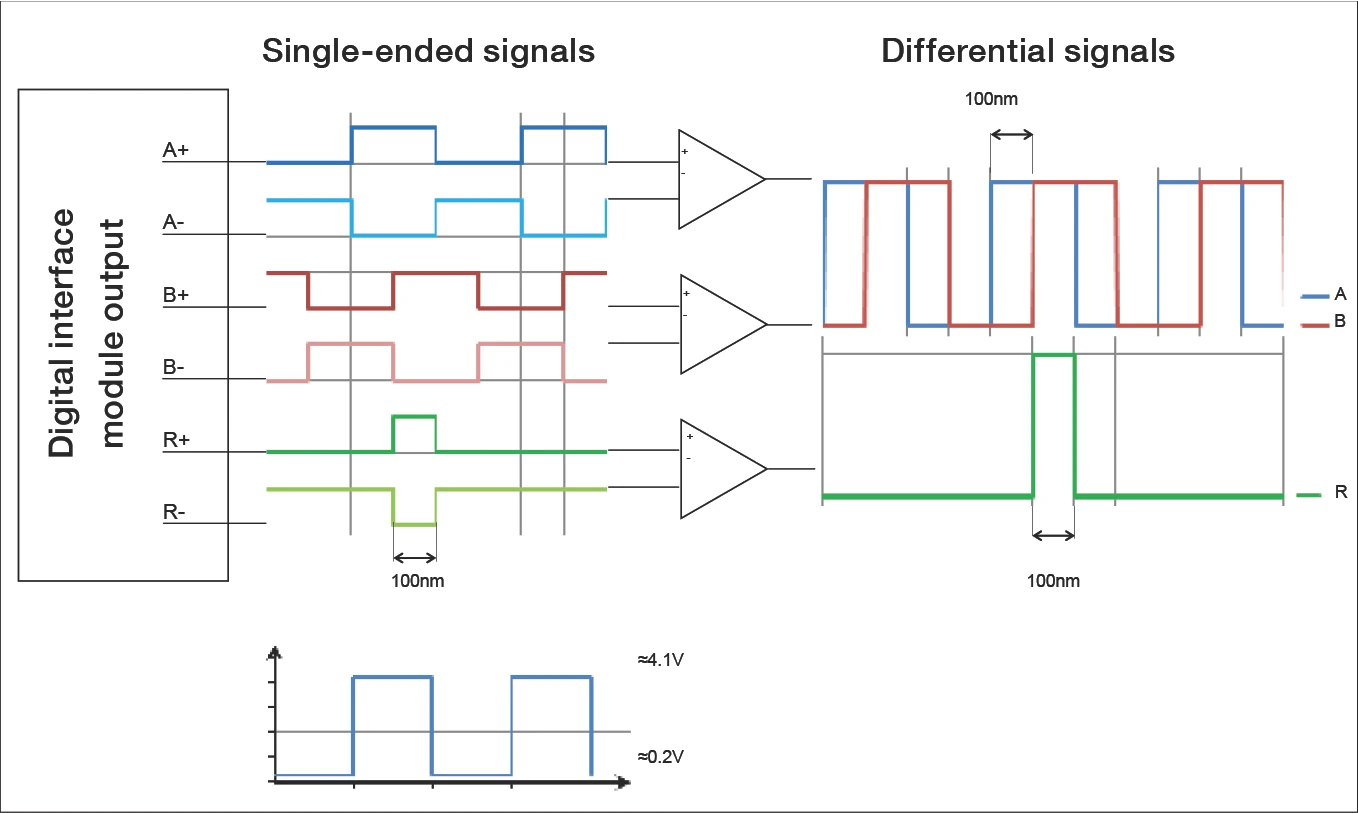
接口模组的数字输出讯号。可以单端(参考接地)或差动方式使用。
RS 422 的汇流排终端电阻应为 120 欧姆。
5.2 接脚定义
5.2.1 模拟和数字接口模组
公型 9 脚 D-Sub 连接器或焊接端子:
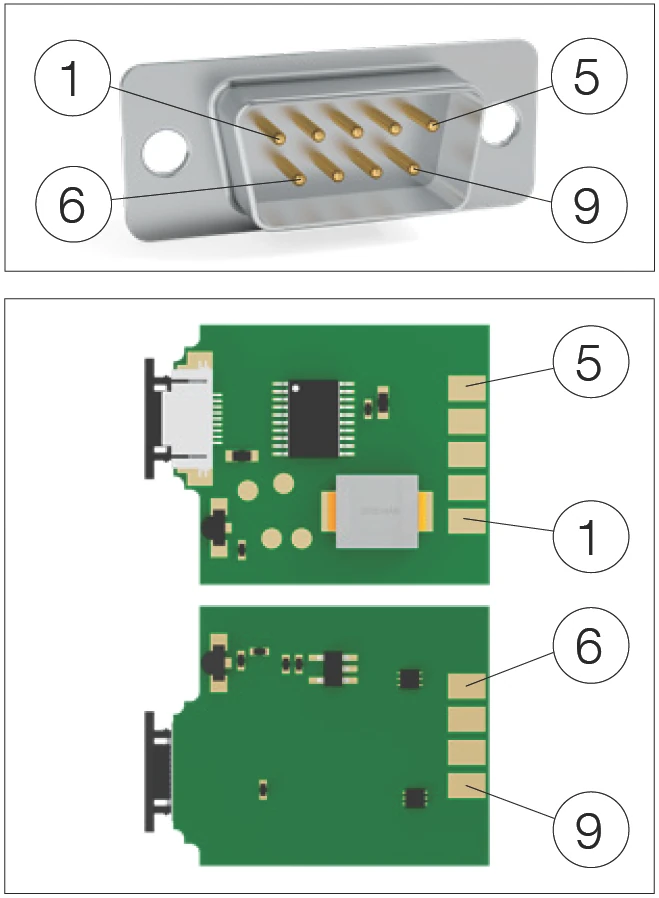
D-Sub 9 连接器脚位
| 接脚 | 模拟讯号 | 数字讯号 | 说明 |
|---|---|---|---|
| 1 | Ua1- | A - | 正交信号 |
| 2 | 0V | 0V | 接地 |
| 3 | Ua2- | B - | 正交信号 |
| 4 | ERR NOT | ERR NOT | 错误讯号(Low = 错误) |
| 5 | Ua0 - | R - | 参考讯号 |
| 6 | Ua1 + | A + | 正交信号 |
| 7 | + 5V DC | + 5V DC | 供电电压 |
| 8 | Ua2 + | B + | 正交信号 |
| 9 | Ua0 + | R + | 参考讯号 |
图 1:接口模组 D-Sub 9 连接器的接脚连接
图 2:带焊接端子的接口模组接脚连接
公型 10 脚 Micro Match 连接器:
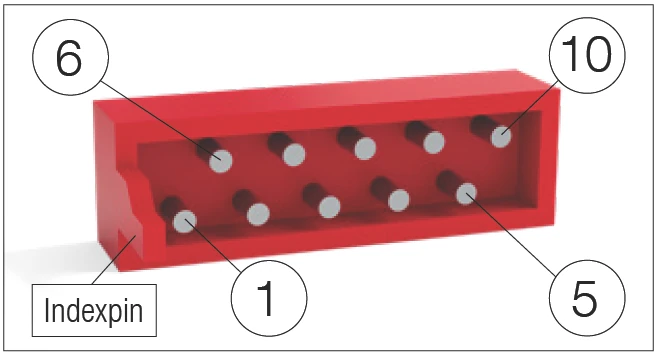
接口模组 Micro Match 连接器的接脚连接
| 接脚 | 模拟讯号 | 数字讯号 | 说明 |
|---|---|---|---|
| 1 | nc | nc | |
| 2 | Ua1 + | A + | 正交信号 |
| 3 | + 5V DC | + 5V DC | 供电电压 |
| 4 | Ua2 + | B + | 正交信号 |
| 5 | Ua0 + | R + | 参考讯号 |
| 6 | Ua1 - | A - | 正交信号 |
| 7 | 0V | 0V | 接地 |
| 8 | Ua2 - | B - | 正交信号 |
| 9 | ERR NOT | ERR NOT | 错误讯号(Low = 错误) |
| 10 | Ua0 - | R - | 参考讯号 |
5.2.2 感测排线
注意:此资讯仅与直接处理原始讯号因此不使用现有接口模组的客户相关。
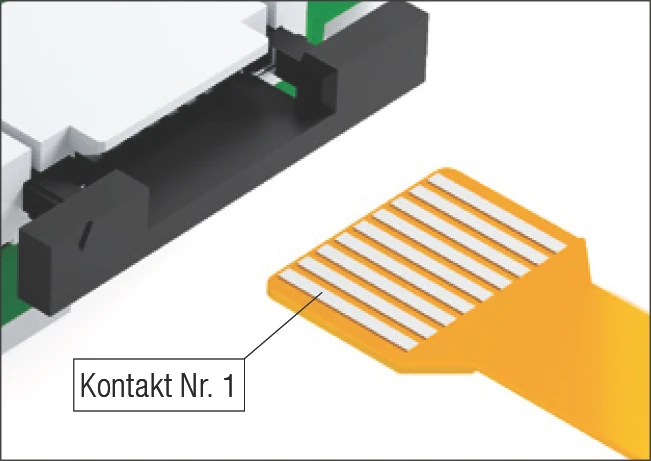
挠性感测排线的接脚连接
| 接脚 | 讯号 | 说明 |
|---|---|---|
| 1 | PZ | 原始讯号参考 |
| 2 | GND | 接地 |
| 3 | NZ | 原始讯号参考 |
| 4 | +5V DC | 供电电压 |
| 5 | Diode | 光源供电 |
| 6 | PSIN | 原始正弦讯号 |
| 7 | NSIN | 原始正弦讯号 |
| 8 | PCOS | 原始余弦讯号 |
| 9 | NCOS | 原始余弦讯号 |
5.3 控制器
MINISLIDE MSQscale 与每个具有 1 Vpp 信号(模拟正弦/余弦)增量编码器埠或 RS-422 埠(数字 TTL)的控制器相容。MINISLIDE MSQscale 可连接到 RS-422 或 RS-485 编码器输入。
各主要控制器制造商提供合适的模组,包括 Siemens、Beckhoff、ACS 等。
对于简单应用,可使用 USB 计数器(例如 Heilig & Schwab 的产品;请参见产品型录第 5.2 节)将 MINISLIDE MSQscale 直接连接到 PC。
选择控制器时必须考虑最大输入频率。根据行进速度和分辨率,频率可能高达 8 MHz。请参见第 6.4 节了解一些计算范例。
带 1 Vpp 信号或正交信号编码器埠的控制器
5.3.1 设定
模拟讯号
模拟讯号必须在客户提供的设备中进行内插,以获得适当的分辨率。信号周期对应 100 μm 的距离。
范例:信号周期 100 μm,内插因子 250 和四边缘评估,可得到 0.1 μm 的分辨率。
数字讯号
驱动控制器中的步进大小必须根据所选分辨率和边缘评估类型进行配置。
MINISLIDE MSQscale 的标准分辨率为 0.1 μm。分辨率为 1 μm 或 10 μm 可作为选项订购。
大多数控制器允许选择边缘评估类型。选项为四边缘、二边缘和单边缘评估(参见第 6.3 节)。
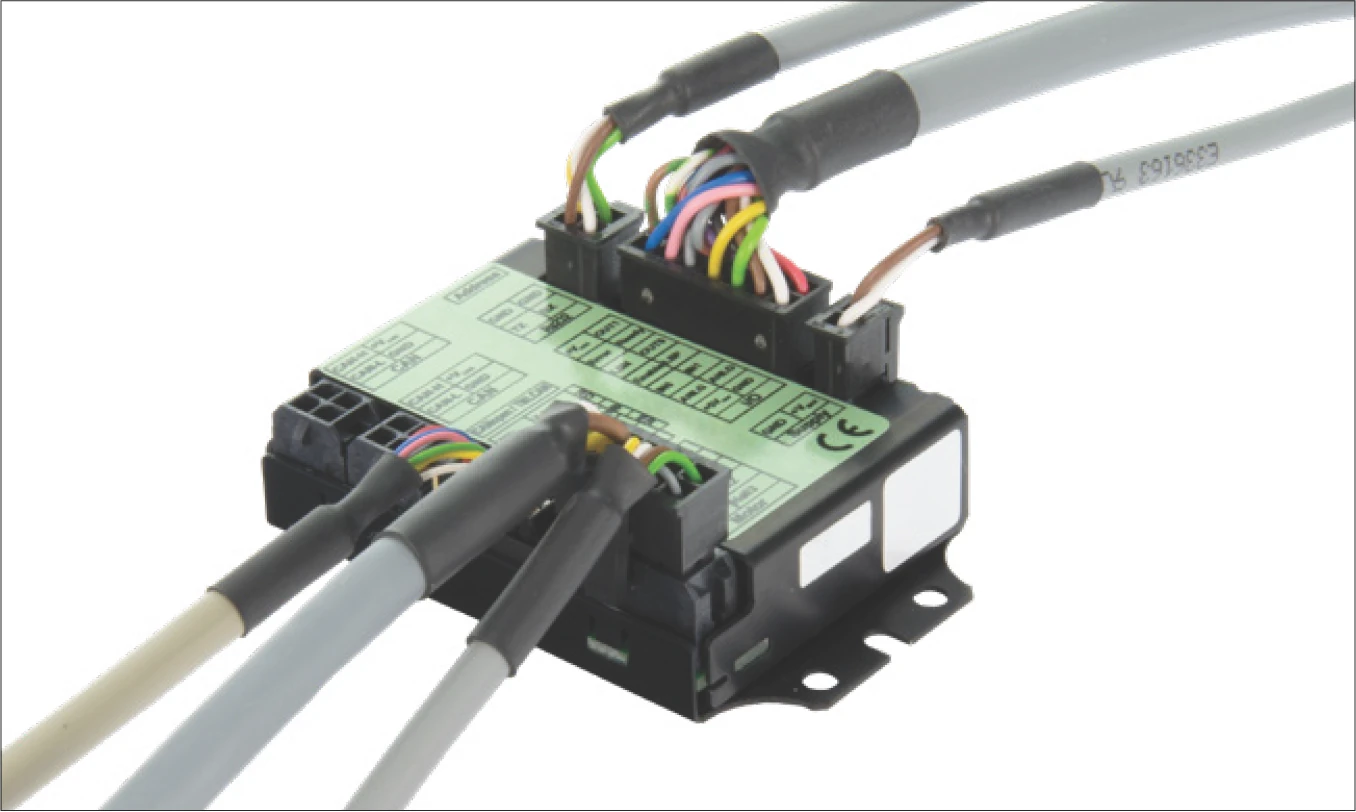
5.4 功能检查
如果 MINISLIDE MSQscale 正确供电,绿色 LED 将会亮起。
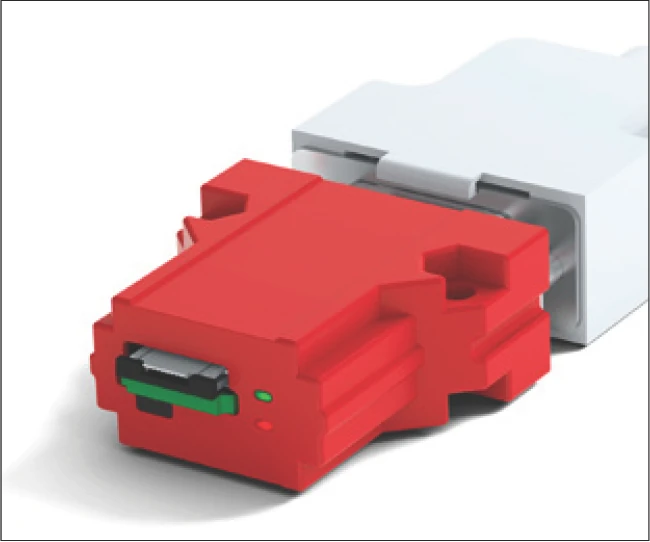
无 MINISLIDE MSQscale 挠性感测排线的接口模组。绿色和红色 LED 均亮起。
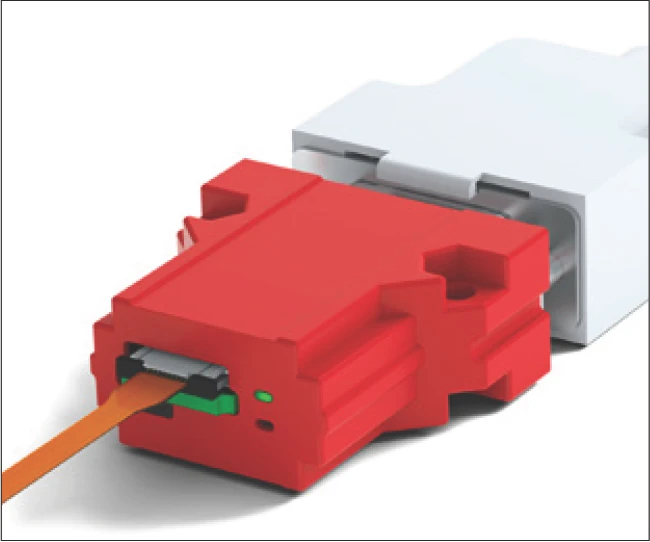
正确连接 MINISLIDE MSQscale 挠性感测排线的接口模组。绿色 LED 亮起。
如果滑块在导轨上且尽管已插入挠性感测排线但 LED 仍亮红色,应使用第 9.2 节「错误描述」的表格查找错误。
| LED | 未供电 | 已供电,正常运作 | 错误状态 |
|---|---|---|---|
| 红色 | 不亮 | 不亮 | 亮红色 |
| 绿色 | 不亮 | 亮绿色 | 亮绿色 |
接口模组的状态通过输出(「ERR NOT」)以电子方式显示。ERR NOT 是一个 5 伏特输出(TTL 电位),其中「低讯号」=「待处理错误」,「高讯号」=「无错误」。
错误讯号应连接到高阻抗输入。如果输入阻抗过低,电流将流过红色 LED,导致其发光。
6 技术原理
6.1 系统精度
6.1.1 系统精度
系统精度由长波偏差(尺度刻度的线性度)和扫描系统(传感器和接口模组)的短波偏差(如内插精度)组成。精度值参考室温 20 °C(68 °F)。
长波偏差
尺度刻度的线性度涵盖整个导轨长度。在此长度范围内,相对于理想刻度,尺度刻度的偏差始终小于 +/- 3 μm。
短波偏差
所有增量式距离测量系统都受到周期偏差效应的影响。这种周期偏差,也称为短波偏差,由于感测系统或电气讯号处理中的微小偏差而产生。这意味著正弦和余弦讯号偏离了数学上的精确形式。如果周期偏差仅在数字化和位置计算过程中发生,那么我们称之为内插误差。
MINISLIDE MSQscale 的短波偏差始终在 +/- 0.6 μm 范围内。
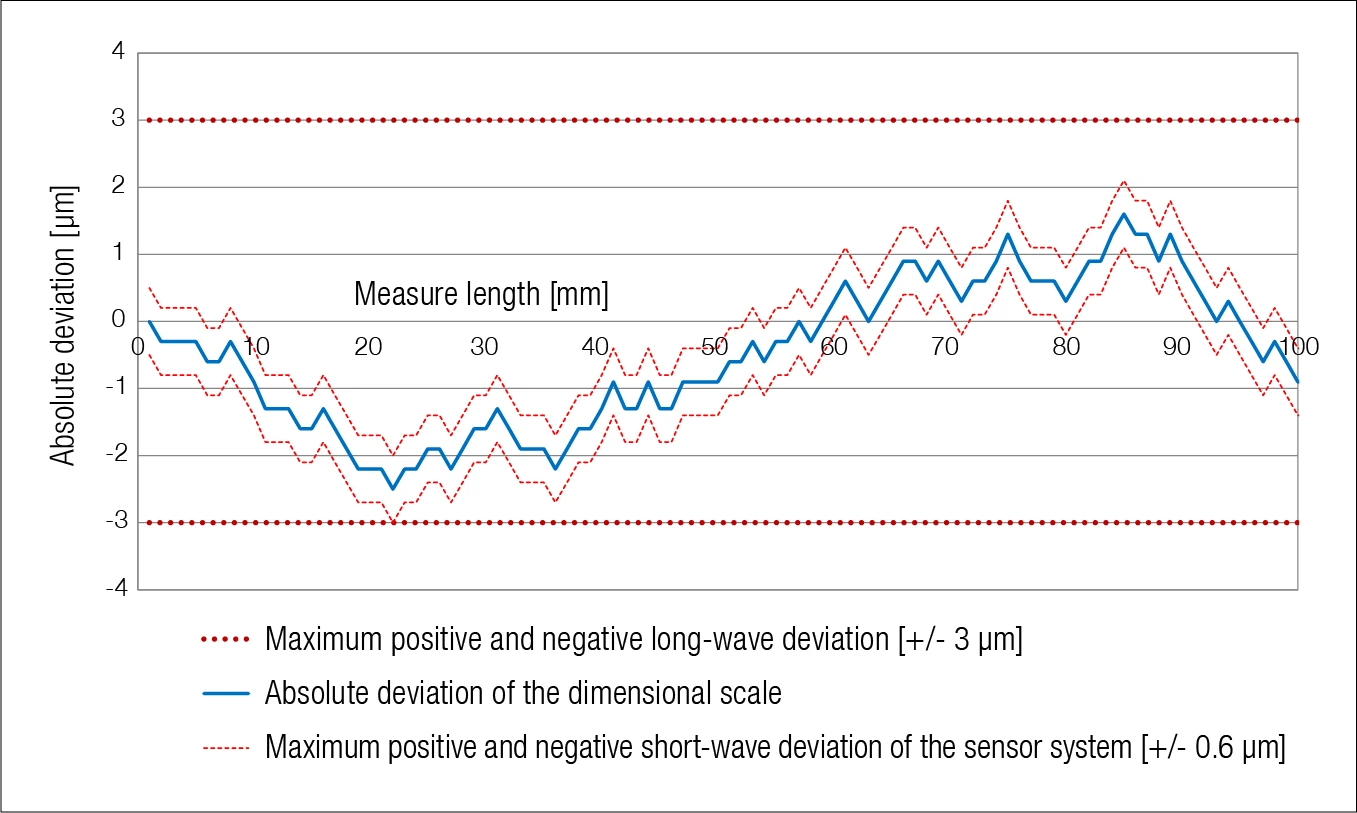
系统精度由长波偏差和短波偏差决定
每个系统都记录了尺度刻度的线性度,可应客户要求提供。记录始终参考特定的导轨(参见导轨编号)。
6.2 内插
对于距离量测应用,内插意指将模拟输入讯号转换为具有更小信号周期的数字输出讯号。这是必要的,因为计数读数和/或位置读数无法直接从模拟讯号生成。
内插因子定义了模拟输入讯号到数字输出讯号的信号周期比。
内插过程的输出是正交信号,即两个具有 90° 相位偏移的脉冲波形。分辨率由正交信号两个边缘之间的距离定义。
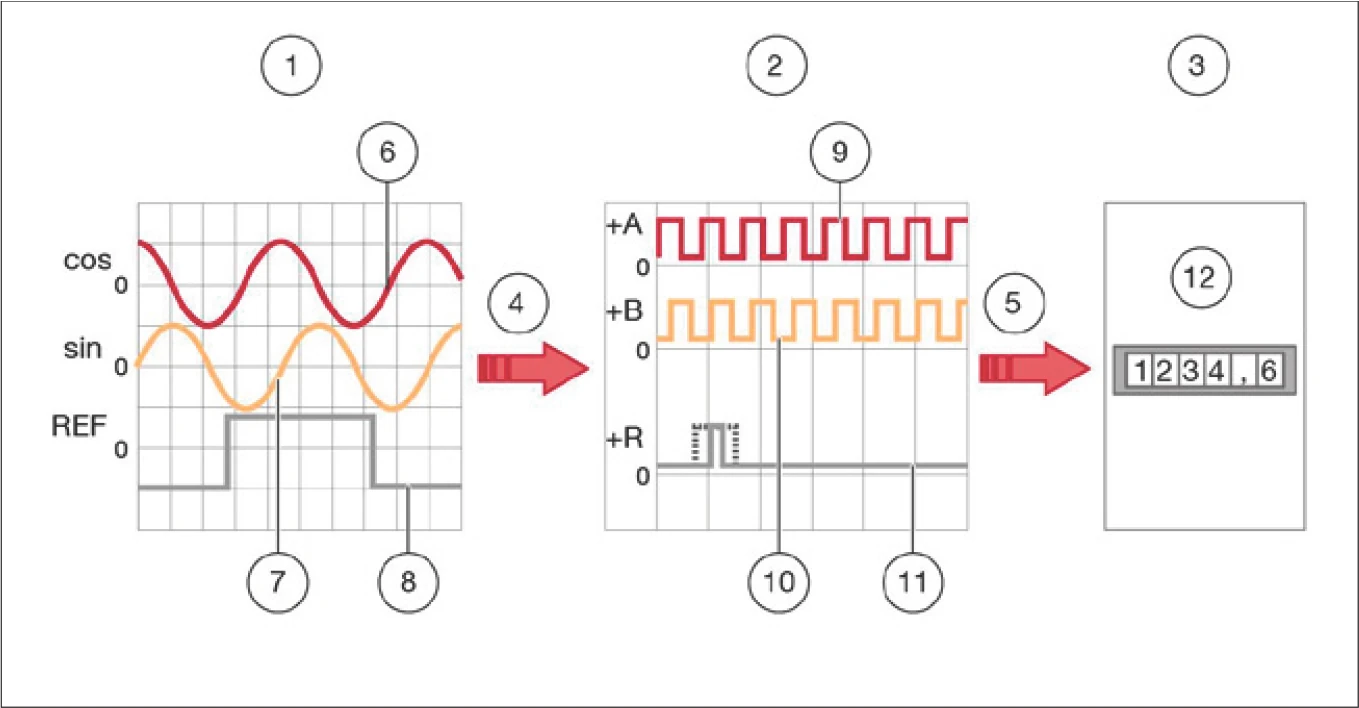
模拟输入讯号(sin、cos、REF)内插(红色箭头)为数字输出讯号(+A、+B、+R)。反相讯号未表示:
1. 模拟输入讯号:sin、cos、REF
2. 数字输出讯号:+A、+B、+Z
3. 下游电子设备
4. 内插
5. 讯号处理
6. 模拟输入讯号(cos)
7. 模拟输入讯号(sin)
8. 模拟输入讯号(REF)
9. 数字输出讯号(+A)
10. 数字输出讯号(+B)
11. 数字输出讯号(+Z)
12. 量测计数器、PC、机器控制器等
6.3 数字讯号评估
数字讯号由两个增量讯号 A 和 B 及参考讯号 R 组成,传输到下游电子设备。这可以是简单的显示单元、PC 或机器控制器。
下游电子设备通过计算讯号边缘来确定位置值。计数方向由讯号 A 和 B 的相位关系决定。根据评估的边缘数量,我们称之为:
1. 单边缘评估
每个通道仅计数一个边缘。因此,一个量测步进对应一个数字信号周期。
2. 二边缘评估
计数一个通道的上升和下降边缘。因此,一个量测步进对应数字信号周期的一半。
3. 四边缘评估
计数两个通道的上升和下降边缘。因此,一个量测步进对应数字信号周期的四分之一。
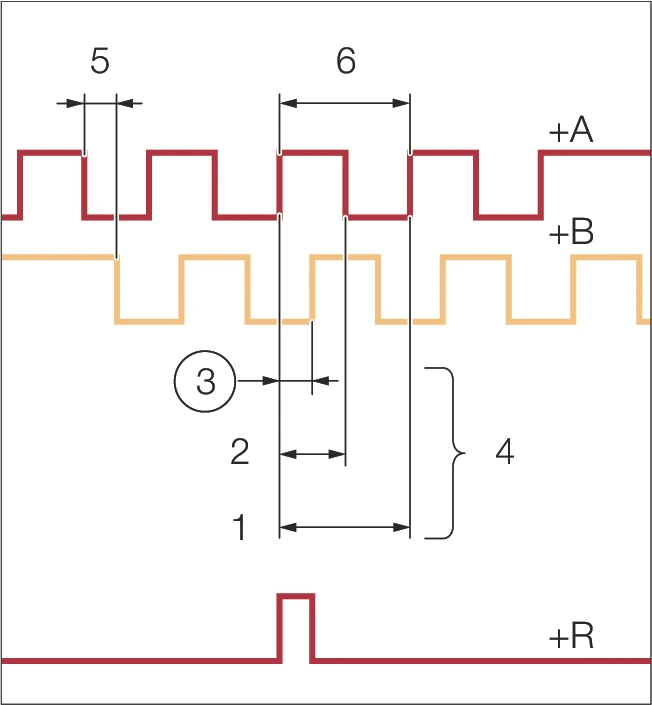
1. 单边缘评估 2. 二边缘评估 3. 四边缘评估
4. 各情况下一个量测步进 5. 分辨率 6. 数字信号周期
6.3.1 分辨率
分辨率是量测系统可量测的最小位置变化。这对应正交信号两个边缘之间的距离。分辨率由模拟信号周期、内插因子和评估方式决定。
分辨率计算范例 (A)
| I 内插因子(默认) | 250 |
| P 输入信号周期 | 100 μm |
| E 评估(4 边缘) | 因子 = 4 |
A = PI × E = 100 μm250 × 4 = 0.1 μm
6.4 讯号频率
接口模组输出的讯号频率取决于行进速度和分辨率(数字模组)或尺度刻度的增量(模拟模组)。为确保不遗漏步进,控制器的最大输入频率必须大于接口模组计算的最大输出频率。
f = vP
f = 频率(Hz) v = 速度(m/s) P = 增量(m)
6.4.1 模拟 MINISLIDE MSQscale 的计算范例
| v 行进速度 | 2 m/s |
| P 信号周期(对应尺度刻度的增量) | 100 μm |
f = vP = 2 m/s100 × 10-6 m = 20,000 Hz = 20 kHz
6.4.2 数字 MINISLIDE MSQscale 的计算范例
数字接口模组的最大输出频率为每通道 8 MHz。这意味著 A 讯号和 B 讯号各自的最大频率为 8 MHz。以 A/B 讯号的四边缘评估,计数率为 32 MHz,对应分辨率 0.1 μm 时的最大速度 3.2 m/s。
数字 MINISLIDE MSQscale 的最大性能
| v 最大速度 | 3.2 m/s |
| A 分辨率 | 0.1 μm |
| P 数字信号周期(4 × 分辨率) | 0.4 μm |
接口模组最大输出频率(对应控制器所需的最小输入频率范围)计算:
f = vP = 3.2 m/s0.4 × 10-6 m = 8,000,000 Hz = 8 MHz
最小所需控制器计数频率(四边缘评估)计算:
fcount = vA = 3.2 m/s0.1 × 10-6 m = 32,000,000 Hz = 32 MHz
速度 v 计算范例
反之,可从给定频率(例如受所选控制器限制)计算速度或分辨率。
| f 最大控制器输入频率 | 1 MHz |
| A 分辨率 | 0.1 μm |
| P 数字信号周期(4 × 分辨率) | 0.4 μm |
Vmax = f × P = 1 MHz × 0.4 μm = 0.4 m/s