แบบมิติ
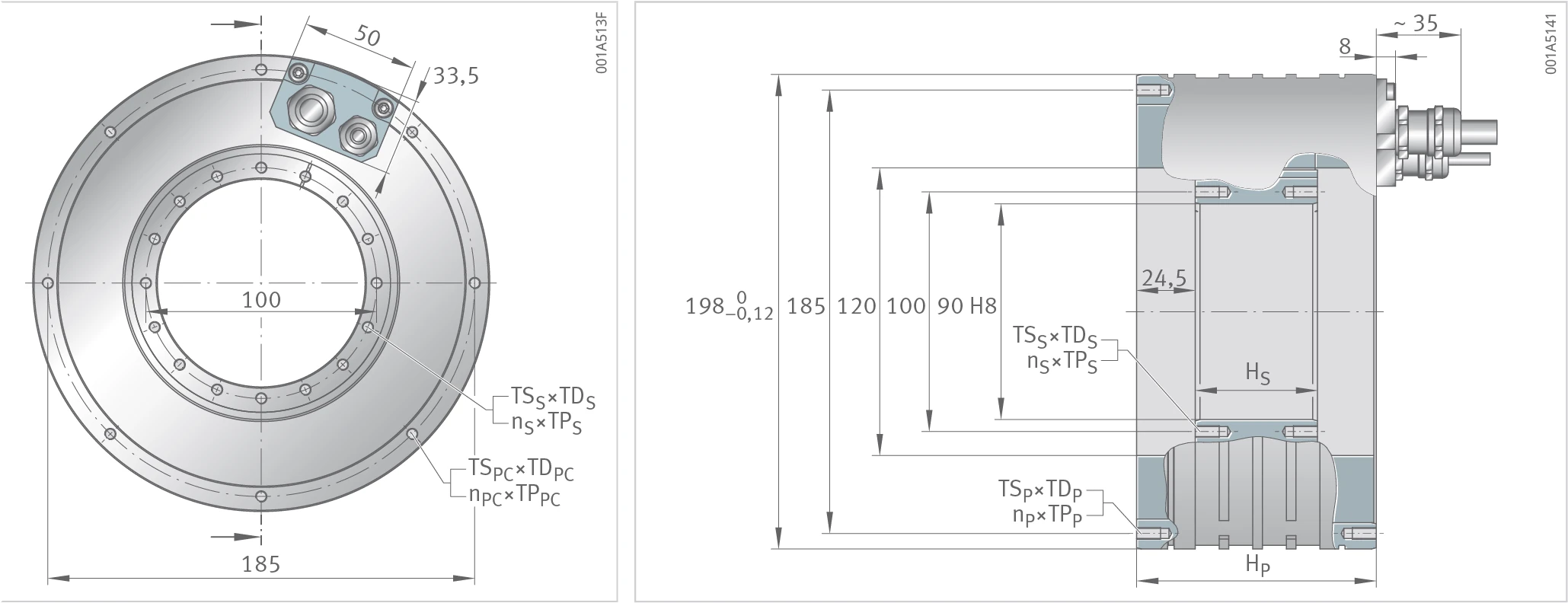
แบบมิติ RIB11-3P-120xH — ความสูงสเตเตอร์ (ชิ้นส่วนปฐมภูมิ) HP, ความสูงโรเตอร์ (ชิ้นส่วนทุติยภูมิ) HS, เส้นผ่านศูนย์กลางภายนอก 185, เส้นผ่านศูนย์กลางภายใน 90 H8 พร้อมระบุการกระจายรูเกลียวของสเตเตอร์/โรเตอร์ (TS×TD, n×TP) และตำแหน่งทางออกของสายเคเบิล
คำอธิบาย
RIB เป็นมอเตอร์แรงบิดแบบซิงโครนัสชนิดแม่เหล็กถาวรที่หมุนภายใน สเตเตอร์เป็นแกนเหล็กแบบแผ่นเหล็กลามิเนต ระบายความร้อนด้วยน้ำและหุ้มปิดผนึกอย่างสมบูรณ์ ส่วนโรเตอร์เป็นวงแหวนเหล็กที่มีแม่เหล็กถาวรยึดติดในแนวรัศมีกับวงแหวนเหล็ก ซึ่งทำหน้าที่เป็นทางเดินกลับของสนามแม่เหล็ก โรเตอร์สามารถจัดศูนย์ได้จากด้านใดด้านหนึ่งของเส้นผ่านศูนย์กลางภายในและยึดที่หน้าปลาย ซีรีส์ RIB11-3P-120xH แบ่งตามความสูงใช้งานออกเป็น 6 ขนาด ตั้งแต่ 120×25 ถึง 120×150
ข้อมูลด้านมิติ
หมายเหตุ
ช่วงพิกัดความเผื่อ ±10% ในรหัสรุ่น D×H หมายถึง "เส้นผ่านศูนย์กลางช่องอากาศใช้งาน × ความสูงใช้งาน" (หน่วย: mm)
| ข้อมูลด้านมิติ | สัญลักษณ์ | หน่วย | 120×25 | 120×50 | 120×75 | 120×100 | 120×125 | 120×150 |
|---|---|---|---|---|---|---|---|---|
| มวลของชิ้นส่วนทุติยภูมิ | mS | kg | 0.9 | 1.7 | 2.6 | 3.4 | 4.3 | 5.1 |
| มวลของชิ้นส่วนปฐมภูมิ | mP | kg | 7.9 | 10.8 | 13.7 | 17.2 | 20.4 | 23.6 |
| ความสูงของชิ้นส่วนทุติยภูมิ | HS | mm | 26 | 51 | 76 | 101 | 126 | 151 |
| ความสูงของชิ้นส่วนปฐมภูมิ | HP | mm | 80 | 100 | 120 | 150 | 175 | 200 |
| เกลียว, ชิ้นส่วนทุติยภูมิ | TSS×TDS | – | M5×10 | M5×10 | M5×10 | M6×10 | M6×10 | M6×10 |
| เกลียว, ชิ้นส่วนทุติยภูมิ, จำนวน×ระยะพิตช์ | nS×TPS | ° | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 |
| เกลียว, ชิ้นส่วนปฐมภูมิ, ด้านสายเคเบิล | TSPC×TDPC | – | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 |
| เกลียว, ชิ้นส่วนปฐมภูมิ, ด้านสายเคเบิล, จำนวน×ระยะพิตช์ | nPC×TPPC | ° | 8×45 | 8×45 | 8×45 | 15×22.5 | 15×22.5 | 15×22.5 |
| เกลียว, ชิ้นส่วนปฐมภูมิ | TSP×TDP | – | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 |
| เกลียว, ชิ้นส่วนปฐมภูมิ, จำนวน×ระยะพิตช์ | nP×TPP | ° | 8×45 | 8×45 | 8×45 | 16×22.5 | 16×22.5 | 16×22.5 |
ข้อมูลสมรรถนะ
หมายเหตุ
ช่วงพิกัดความเผื่อ ±10% แต่ละคอลัมน์เป็นการผสมระหว่าง "ขนาด × แบบขดลวด" โดยรหัสแบบขดลวดเช่น Z0.7, Z1.5, Z1.4, Z2.9 อุณหภูมิน้ำหล่อเย็นขาเข้าที่กำหนด +20 °C
| ข้อมูลสมรรถนะ | สัญลักษณ์ | หน่วย | 120×25 Z0.7 | 120×25 Z1.5 | 120×50 Z1.5 | 120×75 Z1.4 | 120×75 Z2.9 | 120×100 Z1.4 | 120×100 Z2.9 | 120×125 Z1.4 | 120×125 Z2.9 | 120×150 Z1.5 | 120×150 Z2.9 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| แรงบิด | |||||||||||||
| แรงบิดสูงสุด (อัลทิเมต) | Tu | Nm | 68 | 68 | 157 | 236 | 236 | 314 | 314 | 393 | 393 | 471 | 471 |
| แรงบิดพีค | Tp | Nm | 62 | 62 | 139 | 208 | 208 | 277 | 277 | 346 | 346 | 416 | 416 |
| แรงบิดต่อเนื่อง, แบบระบายความร้อน | Tcw | Nm | 32 | 32 | 77 | 126 | 126 | 171 | 171 | 219 | 219 | 250 | 264 |
| แรงบิดต่อเนื่อง, แบบไม่ระบายความร้อน | Tc | Nm | 10 | 10 | 26 | 45 | 45 | 62 | 62 | 80 | 80 | 92 | 98 |
| แรงบิดขณะหยุดนิ่ง, แบบระบายความร้อน | Tsw | Nm | 25 | 25 | 59 | 97 | 97 | 131 | 131 | 167 | 167 | 191 | 202 |
| แรงบิดคอกกิ้ง | Tcog | Nm | 0.21 | 0.21 | 0.42 | 0.63 | 0.63 | 0.84 | 0.84 | 1.05 | 1.05 | 1.26 | 1.26 |
| ความเร็วรอบ | |||||||||||||
| ความเร็วจำกัดที่ Ip eff และ UDCL | nlp | min⁻¹ | 468 | 1002 | 509 | 298 | 645 | 222 | 494 | 172 | 395 | 154 | 328 |
| ความเร็วหัวเข่า (Knee speed) | nlw | min⁻¹ | 886 | 1843 | 849 | 479 | 1005 | 356 | 758 | 276 | 598 | 260 | 495 |
| ความเร็วพิกัด S1, แบบระบายความร้อน | nlwS1 | min⁻¹ | 682 | 682 | 682 | 479 | 682 | 356 | 682 | 276 | 598 | 260 | 495 |
| กระแสไฟฟ้า | |||||||||||||
| กระแสอัลทิเมตยังผล | Iu eff | A | 18 | 36.1 | 36.1 | 32.2 | 64.5 | 32.2 | 64.5 | 32.2 | 64.5 | 36.1 | 64.5 |
| กระแสพีคยังผล | Ip eff | A | 14.4 | 28.8 | 28.8 | 25.8 | 51.6 | 25.8 | 51.6 | 25.8 | 51.6 | 28.8 | 51.6 |
| กระแสต่อเนื่องยังผล, แบบระบายความร้อน | Icw eff | A | 6.4 | 12.7 | 14.1 | 13.7 | 27.5 | 13.9 | 27.9 | 14.3 | 28.6 | 15.2 | 28.8 |
| กระแสต่อเนื่องยังผล, แบบไม่ระบายความร้อน | Ic eff | A | 1.9 | 3.7 | 4.7 | 4.8 | 9.6 | 5 | 10 | 5.1 | 10.2 | 5.5 | 10.4 |
| กระแสขณะหยุดนิ่งยังผล, แบบระบายความร้อน | Isw eff | A | 4.8 | 9.6 | 10.6 | 10.3 | 20.6 | 10.5 | 20.9 | 10.7 | 21.4 | 11.4 | 21.6 |
| กำลังสูญเสีย | |||||||||||||
| กำลังสูญเสียที่ Tp | Plp | W | 2472 | 2472 | 3794 | 4425 | 4425 | 5454 | 5454 | 6483 | 6483 | 8393 | 7512 |
| กำลังสูญเสียที่ Tcw | Plw | W | 651 | 651 | 1222 | 1697 | 1697 | 2153 | 2153 | 2688 | 2688 | 3158 | 3158 |
| กำลังสูญเสียที่ Tc | Plc | W | 41 | 41 | 102 | 153 | 153 | 205 | 205 | 256 | 256 | 307 | 307 |
| ค่าคุณลักษณะทางไฟฟ้า | |||||||||||||
| แรงดันบัส DC | UDCL | V | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 |
| ความต้านทานไฟฟ้า, เฟสต่อเฟส | R20 | Ω | 7.9 | 2 | 3 | 4.4 | 1.1 | 5.5 | 1.4 | 6.5 | 1.6 | 6.7 | 1.9 |
| ค่าเหนี่ยวนำ, เฟสต่อเฟส | L | mH | 51.4 | 12.8 | 23.5 | 42.8 | 10.7 | 54.1 | 13.5 | 66.2 | 16.5 | 62.1 | 19.4 |
| ค่าคงที่แรงเคลื่อนไฟฟ้าย้อนกลับ, เฟสต่อเฟส | kû | V/(rad/s) | 4.2 | 2.1 | 4.6 | 7.7 | 3.8 | 10.2 | 5.1 | 12.8 | 6.4 | 13.7 | 7.7 |
| ค่าคุณลักษณะทั่วไป | |||||||||||||
| จำนวนคู่ขั้วแม่เหล็ก | P | – | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 |
| ค่าคงที่ของมอเตอร์ | km | Nm/√W | 1.51 | 1.51 | 2.62 | 3.63 | 3.63 | 4.36 | 4.36 | 5 | 5 | 5.28 | 5.58 |
| ค่าคงที่แรงบิด | kT | Nm/A | 5.2 | 2.6 | 5.6 | 9.4 | 4.7 | 12.5 | 6.2 | 15.6 | 7.8 | 16.8 | 9.4 |
| อุณหภูมิเกณฑ์ตัดการทำงานของมอเตอร์ | ϑPTC | °C | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 |
| แรงดึงดูดตามแนวแกน | Fa | kN | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 |
| แรงดึงดูดตามแนวรัศมี | Fr | kN/mm | 0.5 | 0.5 | 0.9 | 1.4 | 1.4 | 1.8 | 1.8 | 2.2 | 2.2 | 2.7 | 2.7 |
| โมเมนต์ความเฉื่อยของชิ้นส่วนทุติยภูมิ | J | kg·m² | 0.0023 | 0.0023 | 0.0046 | 0.0069 | 0.0069 | 0.0091 | 0.0091 | 0.0114 | 0.0114 | 0.0136 | 0.0136 |
| เงื่อนไขการระบายความร้อน | |||||||||||||
| อัตราการไหลเชิงปริมาตร | dV/dt | l/min | 1.9 | 1.9 | 3.5 | 4.9 | 4.9 | 6.2 | 6.2 | 7.7 | 7.7 | 9 | 9 |
| อุณหภูมิน้ำขาเข้าที่กำหนด | ϑnf | °C | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 |
| ผลต่างอุณหภูมิน้ำหล่อเย็น | ∆ϑ | K | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
หมายเหตุ: ช่วงพิกัดความเผื่อของค่าทั้งหมด ±10% ข้อมูลและแบบที่มีผลผูกพันจะจัดเตรียมให้ตามข้อตกลง เราขอแนะนำให้ขอรับการสนับสนุนจากวิศวกรของเราในขั้นตอนการออกแบบมอเตอร์ ข้อมูลอาจเปลี่ยนแปลงได้โดยไม่ต้องแจ้งให้ทราบล่วงหน้า