Drawing
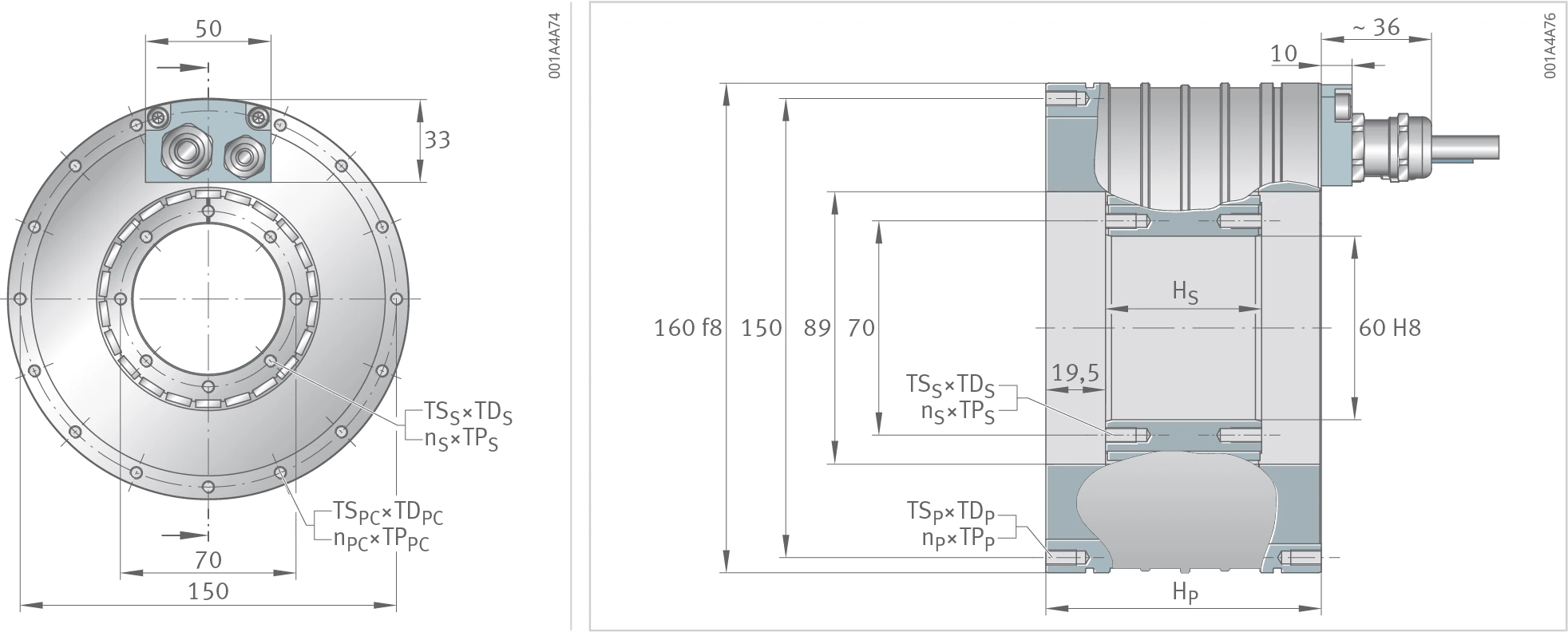
RIB11-3P-89xH drawing — stator (primary part) height HP, rotor (secondary part) height HS, outer diameter 160 f8, inner diameter 60 H8. Includes stator/rotor thread distribution (TS×TD, n×TP) and the cable outlet position.
Description
RIB are internally running permanent magnet synchronous torque motors. The primary part is a water-cooled, fully encapsulated laminated iron core stator; the secondary part is a steel ring with radially arranged glued-on permanent magnets that provides the magnetic return path. The rotor can be centred from both sides of the inner diameter and fixed on the end face. The RIB11-3P-89xH series is divided by active height into 6 sizes, from 89×25 to 89×150.
Geometric Data
Notes
Tolerance range ±10%. In the type designation, D×H denotes "effective air gap diameter × active height" (in mm).
| Geometric data | Symbol | Unit | 89×25 | 89×50 | 89×75 | 89×100 | 89×125 | 89×150 |
|---|---|---|---|---|---|---|---|---|
| Mass, secondary part | mS | kg | 0.5 | 1.1 | 1.6 | 2.2 | 2.7 | 3.2 |
| Mass, primary part | mP | kg | 5.1 | 7.2 | 9.3 | 11.8 | 14.1 | 16.3 |
| Height, secondary part | HS | mm | 26 | 51 | 76 | 101 | 126 | 151 |
| Height, primary part | HP | mm | 70 | 90 | 110 | 140 | 165 | 190 |
| Thread, secondary part | TSS×TDS | – | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 |
| Thread, secondary part, number×pitch | nS×TPS | ° | 8×45 | 8×45 | 8×45 | 16×22.5 | 16×22.5 | 16×22.5 |
| Thread, primary part, cable side | TSPC×TDPC | – | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 |
| Thread, primary part, cable side, number×pitch | nPC×TPPC | ° | 15×22.5 | 15×22.5 | 15×22.5 | 15×22.5 | 15×22.5 | 15×22.5 |
| Thread, primary part | TSP×TDP | – | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 | M5×10 |
| Thread, primary part, number×pitch | nP×TPP | ° | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 | 16×22.5 |
Performance Data
Notes
Tolerance range ±10%. Each column is a combination of "size × winding design"; winding design codes are e.g. Z0.9, Z1.7, Z1.4, Z2.7. Nominal feed temperature of the cooling water +20 °C.
| Performance data | Symbol | Unit | 89×25 Z0.9 | 89×25 Z1.7 | 89×50 Z0.9 | 89×50 Z1.7 | 89×75 Z0.9 | 89×75 Z1.7 | 89×100 Z1.4 | 89×100 Z2.7 | 89×125 Z1.4 | 89×125 Z2.7 | 89×150 Z1.4 | 89×150 Z2.7 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Torques | ||||||||||||||
| Ultimate torque | Tu | Nm | 33 | 33 | 72 | 72 | 110 | 110 | 147 | 147 | 184 | 184 | 221 | 221 |
| Peak torque | Tp | Nm | 30 | 30 | 67 | 67 | 102 | 102 | 134 | 134 | 167 | 167 | 200 | 200 |
| Continuous torque, cooled | Tcw | Nm | 19 | 19 | 42 | 42 | 62 | 62 | 79 | 79 | 100 | 100 | 121 | 121 |
| Continuous torque, not cooled | Tc | Nm | 7 | 7 | 15 | 15 | 23 | 23 | 31 | 31 | 40 | 40 | 49 | 49 |
| Stall torque, cooled | Tsw | Nm | 14 | 14 | 32 | 32 | 46 | 46 | 60 | 60 | 76 | 76 | 91 | 91 |
| Cogging torque | Tcog | Nm | 0.1 | 0.1 | 0.21 | 0.21 | 0.32 | 0.32 | 0.43 | 0.43 | 0.53 | 0.53 | 0.64 | 0.64 |
| Speeds | ||||||||||||||
| Limiting speed at Ip eff and UDCL | nlp | min⁻¹ | 880 | 1829 | 438 | 937 | 269 | 607 | 359 | 780 | 276 | 616 | 222 | 507 |
| Knee speed | nlw | min⁻¹ | 1668 | 3419 | 790 | 1647 | 512 | 1091 | 682 | 1430 | 532 | 1127 | 434 | 928 |
| Rated speed S1, cooled | nlwS1 | min⁻¹ | 682 | 682 | 682 | 682 | 512 | 682 | 682 | 682 | 532 | 682 | 434 | 682 |
| Currents | ||||||||||||||
| Effective ultimate current | Iu eff | A | 21.1 | 42.2 | 21.1 | 42.2 | 21.1 | 42.2 | 35.5 | 70.9 | 35.5 | 70.9 | 35.5 | 70.9 |
| Effective peak current | Ip eff | A | 16.9 | 33.8 | 16.9 | 33.8 | 16.9 | 33.8 | 28.4 | 56.7 | 28.4 | 56.7 | 28.4 | 56.7 |
| Effective continuous current, cooled | Icw eff | A | 7.7 | 15.4 | 8.4 | 16.9 | 8.3 | 16.5 | 13.4 | 26.8 | 13.5 | 27.1 | 13.6 | 27.3 |
| Effective continuous current, not cooled | Ic eff | A | 2.5 | 5.1 | 2.9 | 5.8 | 3 | 5.9 | 5 | 10 | 5.1 | 10.3 | 5.3 | 10.5 |
| Effective stall current, cooled | Isw eff | A | 5.6 | 11.1 | 6.1 | 12.1 | 5.9 | 11.9 | 9.6 | 19.3 | 9.8 | 19.5 | 9.8 | 19.7 |
| Power losses | ||||||||||||||
| Power loss at Tp | Plp | W | 1971 | 1971 | 2957 | 2957 | 4337 | 4337 | 5723 | 5723 | 6783 | 6783 | 7737 | 7737 |
| Power loss at Tcw | Plw | W | 556 | 556 | 995 | 995 | 1401 | 1401 | 1725 | 1725 | 2090 | 2090 | 2419 | 2419 |
| Power loss at Tc | Plc | W | 44 | 44 | 89 | 89 | 133 | 133 | 177 | 177 | 221 | 221 | 266 | 266 |
| Electrical characteristic values | ||||||||||||||
| DC link voltage | UDCL | V | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 | 600 |
| Electrical resistance, phase to phase | R20 | Ω | 4.6 | 1.2 | 6.9 | 1.7 | 10.1 | 2.5 | 4.7 | 1.2 | 5.6 | 1.4 | 6.4 | 1.6 |
| Inductance, phase to phase | L | mH | 25 | 6.3 | 47.5 | 11.9 | 71.3 | 17.8 | 33.7 | 8.4 | 42.1 | 10.5 | 50.5 | 12.6 |
| Back EMF constant, phase to phase | kû | V/(rad/s) | 2.1 | 1.1 | 4.2 | 2.1 | 6.4 | 3.2 | 5.1 | 2.5 | 6.3 | 3.2 | 7.6 | 3.8 |
| General characteristic values | ||||||||||||||
| Number of pole pairs | P | – | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 | 11 |
| Motor constant | km | Nm/√W | 0.99 | 0.99 | 1.61 | 1.61 | 2 | 2 | 2.32 | 2.32 | 2.67 | 2.67 | 3 | 3 |
| Torque constant | kT | Nm/A | 2.6 | 1.3 | 5.2 | 2.6 | 7.8 | 3.9 | 6.2 | 3.1 | 7.7 | 3.9 | 9.3 | 4.6 |
| Motor temperature switch-off threshold | ϑPTC | °C | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 |
| Axial attraction | Fa | kN | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| Radial attraction | Fr | kN/mm | 0.5 | 0.5 | 1 | 1 | 1.5 | 1.5 | 2 | 2 | 2.4 | 2.4 | 2.9 | 2.9 |
| Moment of inertia, secondary part | J | kg·m² | 0.00075 | 0.00075 | 0.0015 | 0.0015 | 0.00225 | 0.00225 | 0.003 | 0.003 | 0.00375 | 0.00375 | 0.0045 | 0.0045 |
| Cooling conditions | ||||||||||||||
| Volume flow | dV/dt | l/min | 1.6 | 1.6 | 2.9 | 2.9 | 4 | 4 | 4.9 | 4.9 | 6 | 6 | 6.9 | 6.9 |
| Nominal feed temperature | ϑnf | °C | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 |
| Cooling water temperature difference | ∆ϑ | K | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
Note: Tolerance range of all values ±10%. Binding data and drawings will be made available by agreement; we recommend obtaining support from our engineers in the motor design phase. Subject to change without notice.