5.2.1 캐리지 및 가이드 레일
랙 구동이 장착된 SCHNEEBERGER MONORAIL BZ 가이드 레일을 설계할 때 다음 사항에 유의해야 합니다:
부하 능력
캐리지가 장착된 가이드 레일은 설계 측면에서 표준 가이드 레일과 차이가 없습니다. MONORAIL BM의 부하 능력은 SCHNEEBERGER MONORAIL 및 AMS 제품 카탈로그에 따릅니다.
그러나 MONORAIL BZ의 경우, 시스템의 총 부하 능력이 MONORAIL BM에 비해 제한된다는 점에 유의해야 합니다. 그 이유는 횡방향 힘에 의한 가이드 레일의 레버 작용으로 인한 측면 나사 연결부의 높은 하중, 가이드 레일과 랙 사이의 내부 나사 연결의 마찰 잠금, 그리고 랙과의 극히 작은 접촉 면적 때문입니다. 아래 표에서 강도 등급 12.9 나사 연결 기준의 수치는 허용 횡방향 하중 ± FY 및 허용 인장력과 압축력 ± FZ에 적용됩니다. 이 수치는 캐리지당 적용됩니다.
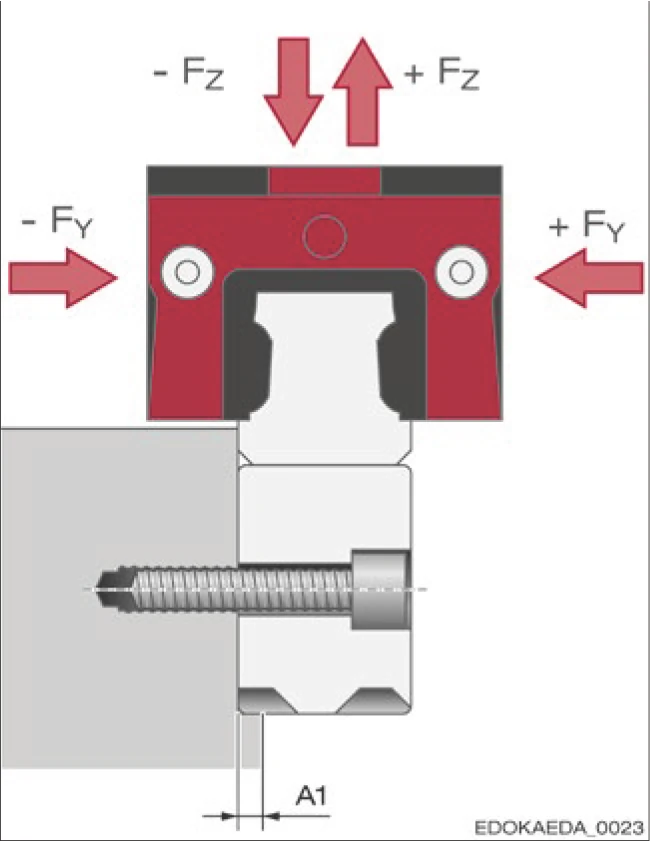
인장력, 압축력 및 횡방향 힘의 영향
최대 인장력, 압축력 및 횡방향 힘 (N)
| 사이즈/캐리지 유형 | +FY (N) | -FY (N) | +FZ (N) | -FZ (N) |
|---|---|---|---|---|
| BZ 25 A/C/E | 5275 | 1840 | 3060 | 8651 |
| B/D | 6375 | 2200 | 3060 | 10455 |
| BZ 35 A/C/E | 9675 | 3600 | 5580 | 24381 |
| B/D | 11675 | 4290 | 5580 | 29421 |
수명
랙 구동이 장착된 워크테이블 시스템의 경우, 기어 맞물림 부위에서 운동 방향에 수직인 추가 힘이 발생합니다. 이 힘은 피니언, 모터 및 캐리지를 통해 가이드 레일로 전달되며, 수명 계산 시 반드시 고려해야 합니다.
헬리컬 기어로 인해 가이드 레일 종축에 횡방향으로 구동할 때 힘 Fy가 발생하며, 여기서 Fy = 0.35 x Fx입니다. 값 0.35는 기어의 비틀림각 β = 19°31'42"에서 비롯됩니다. 구동력이 일정할 때 이 힘은 일정하게 유지됩니다. 그 방향은 가속 방향에 따라 반전됩니다(가속에서 제동으로 전환 시).
또한 랙에 수직인 힘 Fz가 발생하며, 방향은 랙에서 떨어지는 방향으로 Fz = 0.36 x Fx입니다. 이는 치면의 압력각이 약 20°이기 때문입니다. 이 힘은 변동합니다. 수명 계산의 지침으로 Fz ≈ 2/3 Fz_max를 사용해야 합니다.
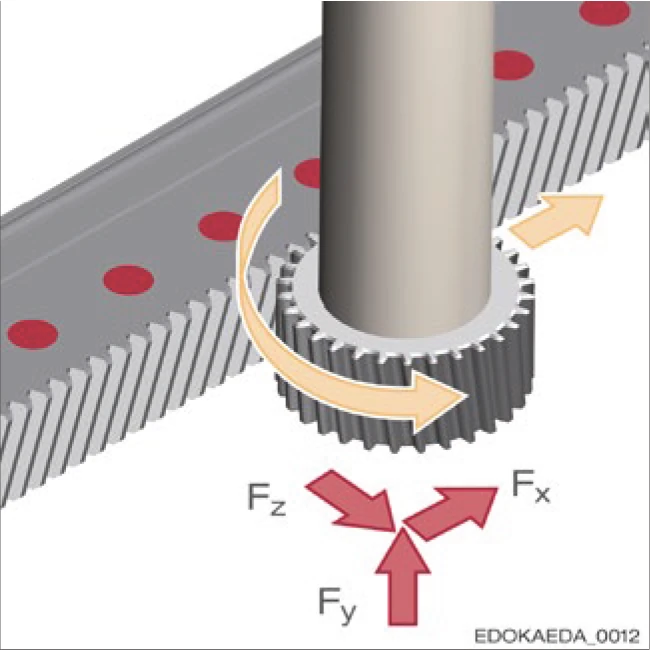
랙에 작용하는 힘
Fy: y 방향의 힘 Fz: z 방향의 힘
E형 캐리지 사용 시의 힘
E형 캐리지를 사용할 때는 힘의 유형과 방향에 주의해야 합니다. 축 방향 슬라이딩 시 캐리지의 횡방향 연결로 인해 토크가 발생할 수 있으며, 이로 인해 내부 추가 힘이 발생하여 수명을 크게 단축시킬 수 있습니다.
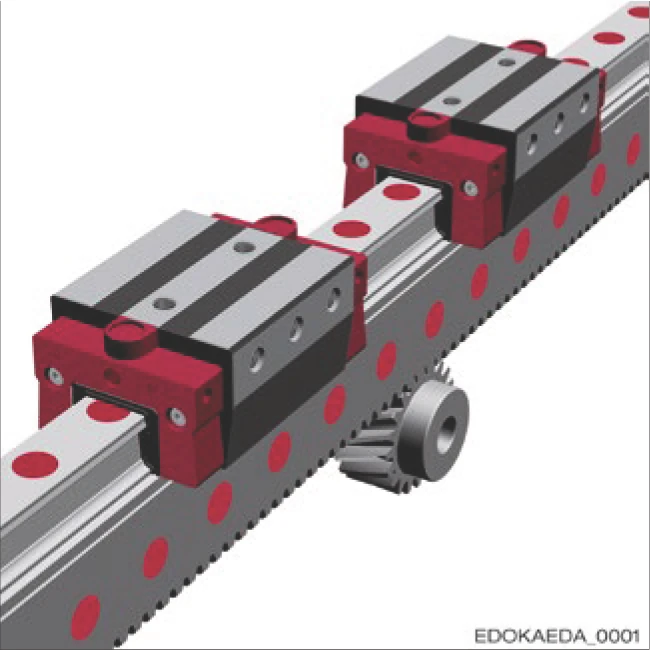
E형 캐리지 2개가 장착된 랙 구동
5.2.2 랙
아래에 나열된 계산 원칙은 랙 구동의 가능한 하중과 수명을 대략적으로 추정하는 데 사용됩니다. 그러나 정밀한 설계를 위해서는 상세한 계산이 필요하며, 필요에 따라 SCHNEEBERGER에 요청할 수 있습니다.
랙 앤 피니언의 하중
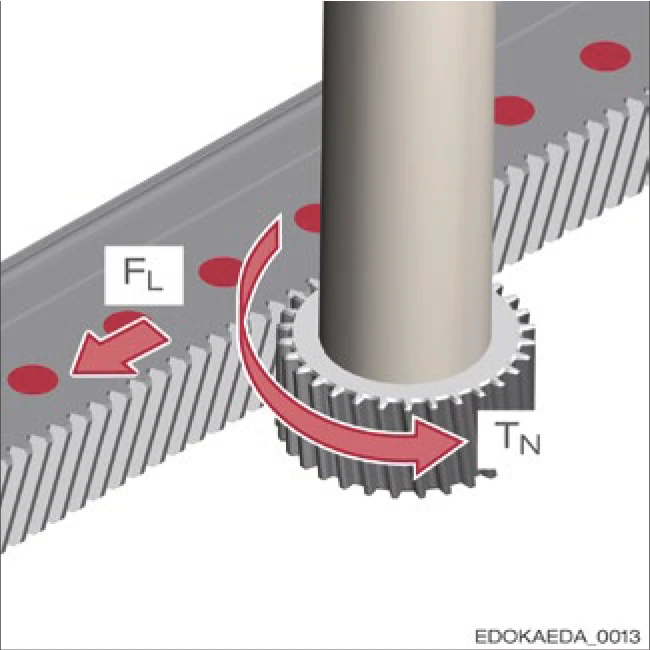
종방향 힘 FL이 작용하는 랙과 토크 TN이 작용하는 피니언
아래 표는 MONORAIL BZ의 사이즈 및 랙 설계, 피니언의 잇수 z, 하중 변화 횟수에 따른 최대 힘 FL과 최대 토크 TN의 개요를 제공합니다.
명시된 값은 효과적인 윤활, 원활한 운행 및 안정적인 베어링 조건에서 유효합니다.
치근 응력 안전 계수 SF ≥ 1.4 및 치면 응력 안전 계수 SH ≥ 1.0이 공식에 포함되어 있습니다.
경험에 따르면, 운전 조건(각도 오차, 윤활 부족, 오염 등)에 대한 안전 계수 SB ≈ 1.0 - 4.0을 고려해야 합니다.
적용 분야에 따라 10⁶ 또는 10⁷ 하중 변화 값을 사용하는 것을 권장합니다. 값 10⁵는 정적 하중과 같은 특수한 경우에만 SCHNEEBERGER와 협의하여 사용합니다.
적용하는 하중 변화 횟수는 다음과 같이 결정됩니다:
주로 사용되는 랙 구간의 잇수가 피니언 잇수 z의 10배를 초과하면 10⁶으로 설계할 수 있으며, 그렇지 않으면 10⁷ 하중 변화를 가정해야 합니다.
| 랙 유형 및 설계 | 피니언 잇수 z | 10⁵ | 10⁶ | 10⁷ | |||
|---|---|---|---|---|---|---|---|
| TN (Nm) | FL (N) | TN (Nm) | FL (N) | TN (Nm) | FL (N) | ||
| BZ 25 | |||||||
| 연질 | 20 | 104 | 4895 | 34.2 | 1610 | 17.5 | 827 |
| 경화 | 20 | 138 | 6500 | 132 | 6240 | 102 | 4800 |
| 연질 | 40 | 295 | 6900 | 132 | 3120 | 70 | 1600 |
| 경화 | 40 | 281 | 6600 | 242 | 5700 | 181 | 4280 |
| BZ 35 | |||||||
| 연질 | 20 | 217 | 8180 | 73 | 2750 | 34 | 1280 |
| 경화 | 20 | 285 | 10700 | 273 | 10300 | 214 | 8000 |
| 연질 | 42 | 627 | 11200 | 292 | 5240 | 183 | 3290 |
| 경화 | 42 | 603 | 10800 | 522 | 9300 | 397 | 7130 |
힘과 토크 계산
수직 스트로크 축
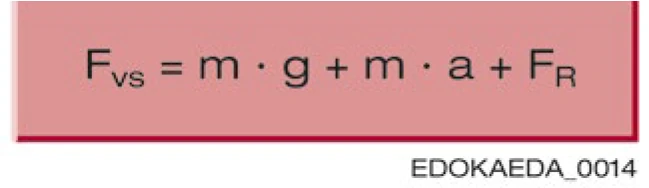
Fvs = 추력 (N)
m = 이동 질량 (kg)
g = 중력 가속도 = 9.81 m/s²
a = 가속도 (m/s²)
FR = 마찰 저항 (N)
수평 스트로크 축
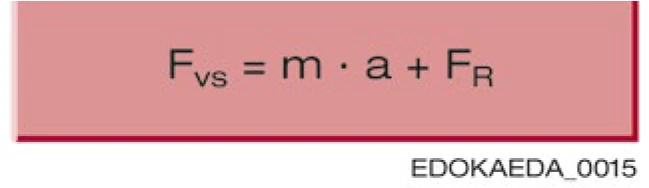
Fvs = 추력 (N)
m = 이동 질량 (kg)
a = 가속도 (m/s²)
FR = 마찰 저항 (N)
가속도
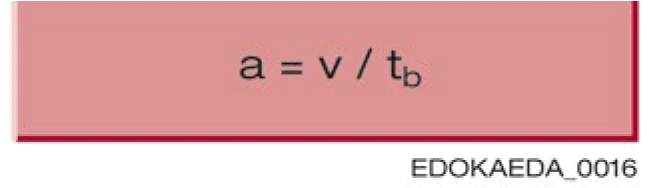
a = 가속도 (m/s²)
v = 속도 (m/s)
tb = 가속 시간 (s)
마찰 저항
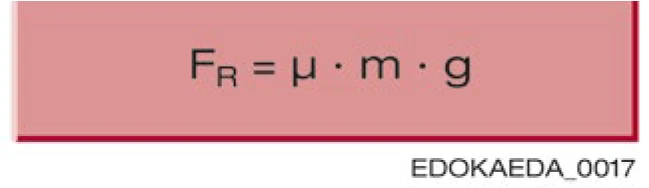
FR = 마찰 저항 (N)
µ = 마찰 계수
m = 이동 질량 (kg)
g = 중력 가속도 = 9.81 m/s²
필요 토크
Merf = 필요 토크
Fvs = 추력 (N)
d = 기준 직경 (mm)
허용 토크
Mzul = 허용 토크
TN = 토크 (위 표 참조)
SB = 운전 조건 안전 계수
경험에 따르면, 운전 조건(각도 오차, 윤활 부족, 오염 등)에 대한 안전 계수(SB ≈ 1.0 – 4.0)를 고려해야 합니다.
다음 조건을 충족해야 합니다:
Mzul = 허용 토크
Merf = 필요 토크