AM 볼 스크류 - 리드 정밀도
Lead Accuracy - Type T 및 Type P
리드 정밀도 개념
ISO/DP 3408/3에 기반한 개념, 명칭 및 공차는 공칭 리드, 규정 리드 및 실제 리드로 구분됩니다.
실제 리드 기울기로부터 하나의 직선을 결정합니다. 공차선은 이 직선에 평행하게 진행됩니다.
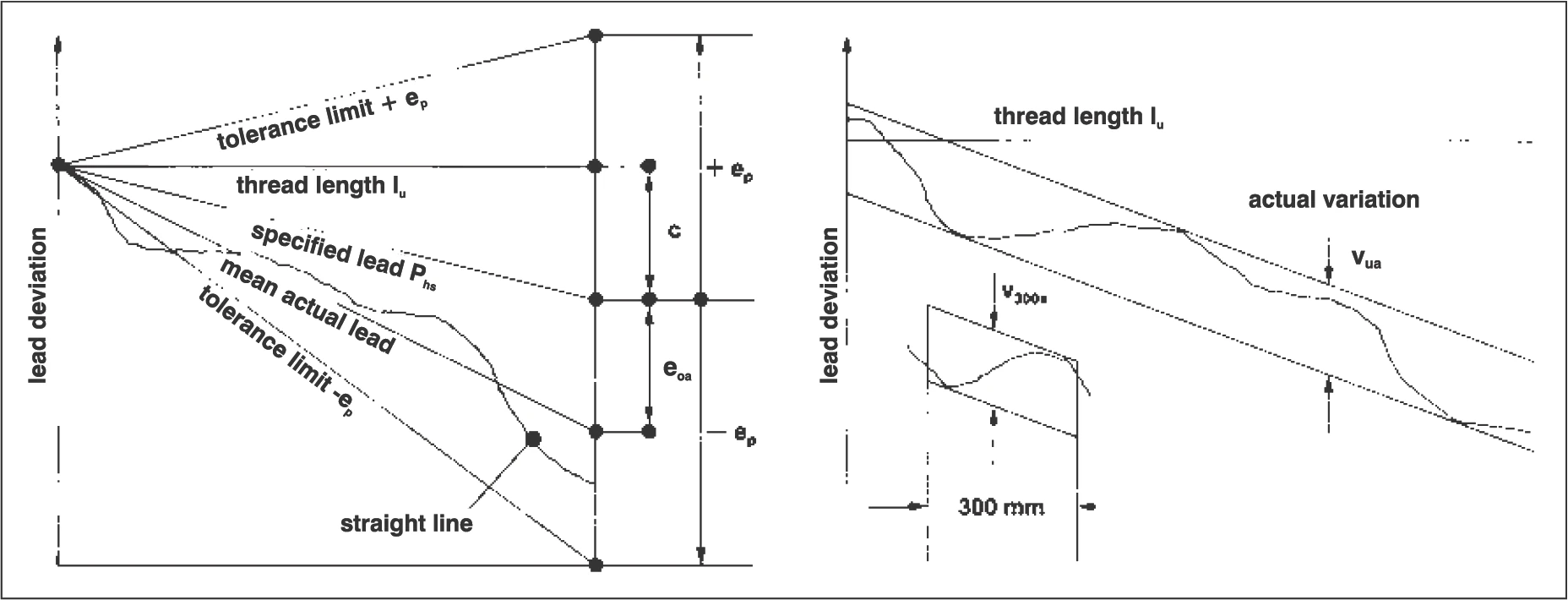
스크류의 열팽창 및/또는 예하중으로 인한 길이 변화를 보상하기 위해, 사용자는 규정 리드 또는 c= 값(보상값)을 명시하여 규정 리드와 공칭 리드 간의 차이를 제시해야 합니다. 모든 편차 e는 규정 리드에 대한 상대값입니다.
리드 정밀도 매개변수
하첨자 a: 실제값, 주요 항목:
| 기호 | 설명 |
|---|---|
| epa | 유효 나사 길이 Iu에 대한 평균 실제 리드 편차 |
| v300a | 300 mm 범위 내의 실제 변동량 |
| vua | Iu 범위 내의 실제 변동량 |
하첨자 p: 허용값, 주요 항목:
| 기호 | 설명 |
|---|---|
| epp | Iu에 대한 허용 평균 리드 편차 |
| e1000p | 1000 mm 범위 내의 허용 평균 리드 편차 |
| v300p | 300 mm 범위 내의 허용 변동량 |
| vup | Iu 범위 내의 허용 변동량 |
이러한 공차 한계는 정밀도 등급에서 기준 길이에 따라 규정됩니다.
Type T(전달형)
Type T (Transmission)
| v300p (µm) | ±e1000p (µm) | ||||
|---|---|---|---|---|---|
| IT 1 | IT 3 | IT 5 | IT 1 | IT 3 | IT 5 |
| 6 | 12 | 23 | 80 | 80 | 80 |
병렬 측정 시스템(리니어 스케일 또는 위치 센서 등)이 존재하는 경우, 볼 스크류의 기능은 이송 운동에만 한정됩니다. 이 경우 스크류의 리드는 거리 측정의 기준이 되지 않으며, 정밀도 요구는 주로 변동량 요구에 해당합니다.
따라서 리드 정밀도의 T형(T=Transmission, 전달)은 '직접' 측정 시스템에 적용됩니다.
Type P(위치결정형)
Type P (Positioning)
| Thread length | vup (µm) | ±ep (µm) | |||||
|---|---|---|---|---|---|---|---|
| IT 1 | IT 3 | IT 5 | IT 1 | IT 3 | IT 5 | ||
| from | to | ||||||
| ≦315 | 6 | 12 | 23 | ||||
| 316 | 400 | 6 | 12 | 25 | 7 | 13 | 25 |
| 401 | 500 | 7 | 13 | 26 | 8 | 15 | 27 |
| 501 | 630 | 7 | 14 | 29 | 9 | 16 | 30 |
| 631 | 800 | 8 | 16 | 31 | 10 | 18 | 35 |
| 801 | 1000 | 9 | 17 | 35 | 11 | 21 | 40 |
| 1001 | 1250 | 10 | 19 | 39 | 13 | 24 | 46 |
| 1251 | 1600 | 11 | 22 | 44 | 15 | 29 | 54 |
| 1601 | 2000 | 13 | 25 | 51 | 18 | 35 | 65 |
| 2001 | 2500 | 15 | 29 | 59 | 22 | 41 | 77 |
| 2501 | 3150 | 17 | 34 | 69 | 26 | 50 | 93 |
| 3151 | 4000 | 21 | 41 | 82 | 32 | 62 | 115 |
| 4001 | 5000 | 25 | 50 | 99 | 39 | 76 | 140 |
축 엔코더가 스크류 또는 모터의 중심선에서 각도 스텝 방식으로 위치(거리) 증분을 표시하는 경우, 볼 스크류의 리드는 워크테이블 스트로크 측정의 핵심 부분이 되므로 최고 정밀도가 요구됩니다.
이는 증분 모터 적용에도 동일하게 적용됩니다. 이러한 '간접' 측정 시스템 적용에는 P형(P=Positioning, 위치결정)이 필요합니다. 스트로크 길이를 가진 스크류가 절대 길이 기준이 되기 때문입니다.
정밀도 등급 선정 가이드
| 정밀도 유형 | 적용 분야 | 측정 시스템 |
|---|---|---|
| Type T | 이송 운동, 정밀도가 외부 측정 시스템에 의해 보장됨 | 직접 측정(리니어 스케일, 위치 센서) |
| Type P | 정밀 위치결정, 리드가 위치 기준으로 사용됨 | 간접 측정(축 엔코더, 증분 모터) |
선택 권장: 리니어 엔코더 등 직접 측정 시스템을 사용하는 경우, 비용 절감을 위해 Type T를 선택할 수 있습니다. 스크류 리드가 위치결정 기준으로 사용되는 경우에는 정밀도 보장을 위해 반드시 Type P를 선택해야 합니다.