3.1.1 Phân loại hệ thống đo lường
Các loại nguyên lý đo lường khác nhau
Đo khoảng cách tuyến tính trong ứng dụng công nghiệp sử dụng nhiều hệ thống đo khoảng cách độ chính xác cao. Các hệ thống này có thể được phân loại thành các danh mục khác nhau dựa trên nguyên lý đo lường vật lý.
Hệ thống từ trở
Sử dụng cảm biến MR hoặc cảm biến hiệu ứng Hall để ghi lại sự thay đổi tuần hoàn trong từ hóa thang đo. Không giống hệ thống quang học, hệ thống từ tính không bị ảnh hưởng bởi bụi bẩn. Chu kỳ bước thông thường từ 0,4 đến 10 mm.
Hệ thống quang học
Sử dụng cảm biến để quét bước, ghi lại sự thay đổi tuần hoàn về độ sáng hoặc pha của ánh sáng phản xạ/truyền qua. Có thể đạt được bước cực mịn với chu kỳ nhỏ hơn 10 µm, cung cấp độ phân giải cao nhất.
Hệ thống cảm ứng
Sử dụng thang đo kim loại có cấu trúc cơ học với thiết kế cực kỳ bền vững. Các dải này hoạt động như lõi biến áp. Khó đạt được chu kỳ bước dưới 1mm.
Đo trực tiếp và đo gián tiếp
Cách thức các thành phần dẫn động và các thành phần hệ thống đo lường phối hợp với nhau là rất quan trọng. Chúng tôi phân biệt đo gián tiếp và đo trực tiếp dựa trên nguyên lý hoạt động.
Đo gián tiếp
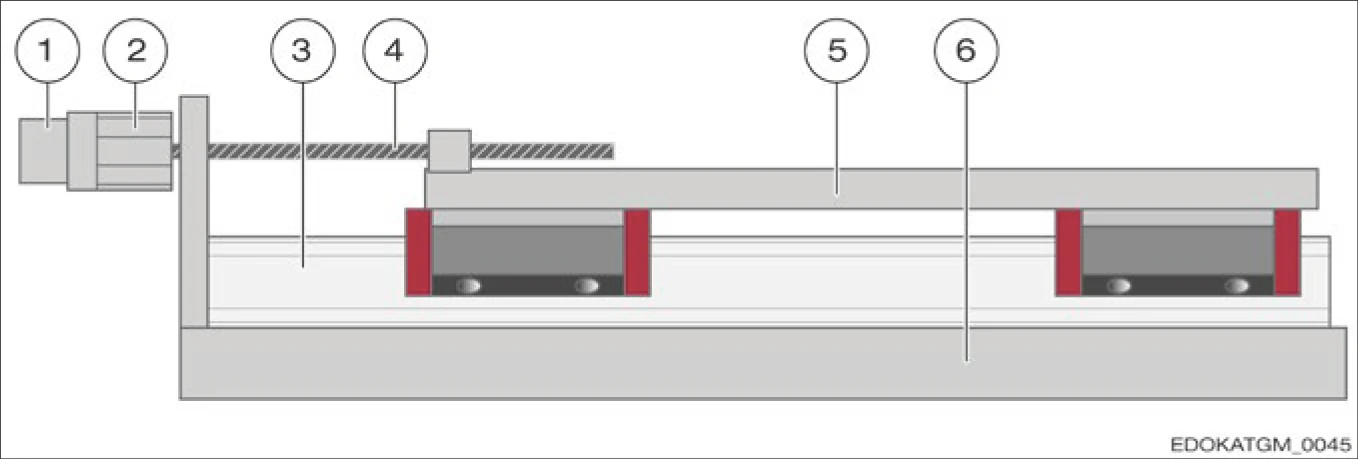
Linear guideway without integral positioning measurement system
Dẫn hướng tuyến tính không có hệ thống đo vị trí tích hợp
Các thành phần:
- Dịch chuyển tuyến tính được chuyển đổi thành các giá trị đo khác
- Ví dụ: Vít me bi với bộ mã hóa quay
- Ưu điểm: Chi phí thấp và kết cấu nhỏ gọn
- Nhược điểm: Quá trình chuyển đổi tạo ra sai số
Đo trực tiếp (MONORAIL AMS)
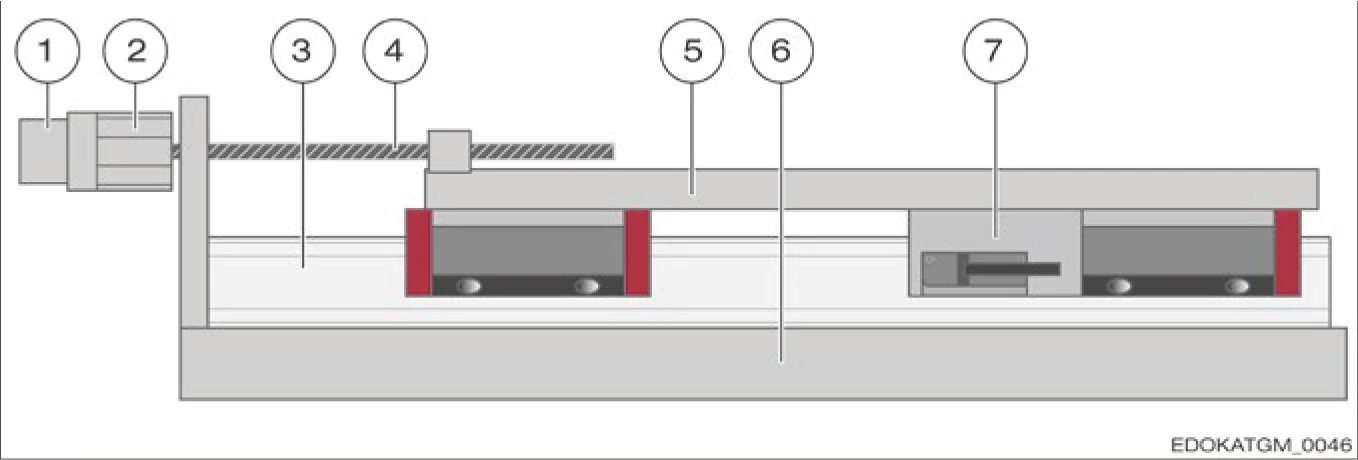
Linear guideway with integral positioning measurement system (MONORAIL AMS)
Dẫn hướng tuyến tính với hệ thống đo vị trí tích hợp (MONORAIL AMS)
Các thành phần:
- Hệ thống đo lường được tích hợp trong dẫn hướng tuyến tính
- Đọc số chính xác hơn
- Ít bị ảnh hưởng bởi các yếu tố môi trường
- Khuyến nghị cho các ứng dụng độ chính xác cao
3.1.2 Tổng quan nguyên lý đo khoảng cách
| Nguyên lý đo khoảng cách | Quang học | Từ trở | Cảm ứng |
|---|---|---|---|
| Độ phân giải (Resolution) | ● ● ● | ● ● ● | ● |
| Dễ tích hợp (Ease of integration) | ● | ● ● ● | ● ● ● |
| Khả năng chống bụi bẩn (Sensitivity to dirt) | ● | ● ● | ● ● ● |
| Không gian lắp đặt (Installation space) | ● | ● ● ● | ● ● ● |
| Lắp đặt (Installation) | ● ● | ● ● ● | ● ● ● |
● = Đạt yêu cầu (Satisfactory), ● ● ● = Rất tốt (Very good)
3.1.3 Công nghệ đo từ trở
Hiệu ứng từ trở
Tất cả các hiệu ứng từ trở đều dựa trên thực tế là các lớp mỏng sắt từ thay đổi điện trở ohmic do từ trường bên ngoài. Các cảm biến trong hệ thống đo khoảng cách SCHNEEBERGER sử dụng hiệu ứng từ trở dị hướng (hiệu ứng AMR).
Ba hiệu ứng đã biết
- AMR (Từ trở dị hướng) - SCHNEEBERGER sử dụng
- GMR (Từ trở khổng lồ)
- TMR (Từ trở đường hầm)
Các cảm biến trong hệ thống đo khoảng cách SCHNEEBERGER sử dụng hiệu ứng từ trở dị hướng (hiệu ứng AMR), được Thomson phát hiện năm 1857 trong vật liệu sắt từ. Khi chiều dòng điện trong dây dẫn song song với chiều từ hóa, điện trở của nó tăng lên vài phần trăm so với khi chiều dòng điện vuông góc với chiều từ hóa.
Sử dụng các lớp mỏng vật liệu sắt từ, có thể chế tạo cảm biến từ trường bằng cách định hướng từ trường nội tại thông qua từ trường bên ngoài. Sau khi từ trường bên ngoài bị loại bỏ, từ trường nội tại vẫn giữ nguyên hướng. Đây là tính chất cơ bản của vật liệu sắt từ.
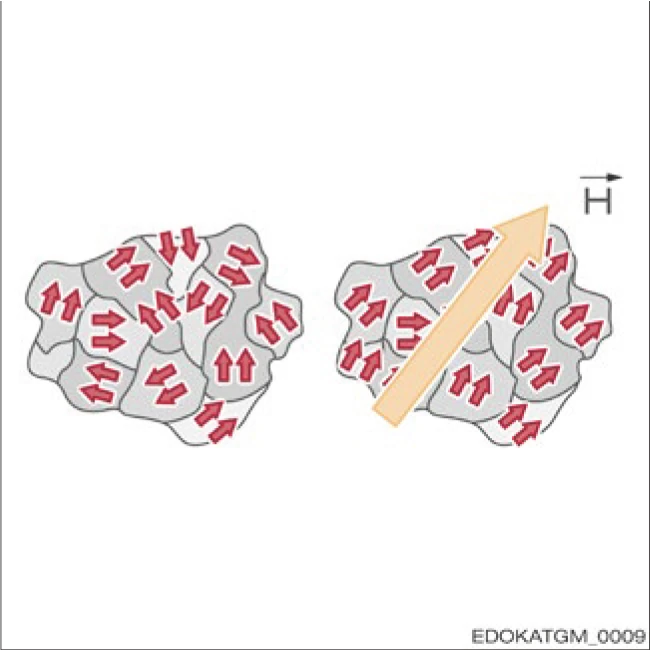
Weiss domains orientation
Định hướng miền Weiss
Định hướng miền Weiss
Magnetic regions (Weiss domains) are oriented on the external magnetic field.
Các vùng từ tính (miền Weiss) được định hướng theo từ trường bên ngoài.
Hiện tượng vật lý:
- Từ trường bên ngoài H⃗r tác động lên vật liệu
- Các miền từ tự phát sắp xếp theo hướng
- Chiều từ hóa ảnh hưởng đến giá trị điện trở
- Tạo thành cơ sở vật lý của hiệu ứng từ trở
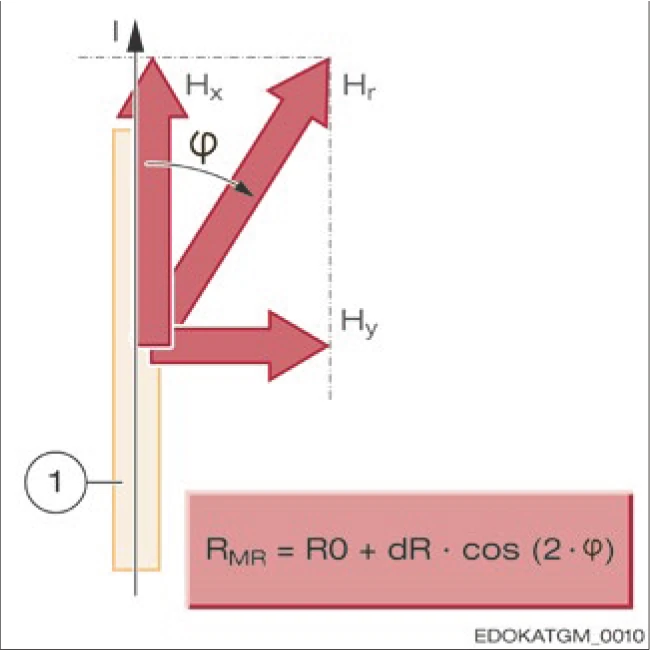
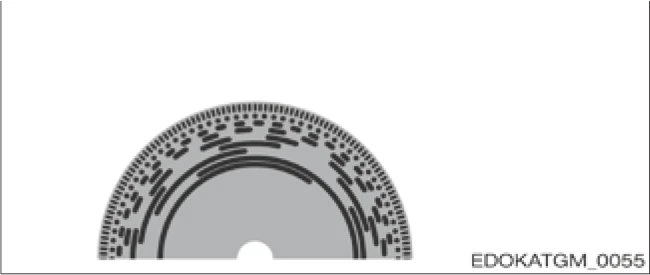
Principle of magneto-resistive sensor with MR strips
Nguyên lý cảm biến từ trở với dải MR
Nguyên lý thay đổi điện trở dải MR
(Intrinsic magnetization of the strip, mainly due to form anisotropy)
(Angle between magnetization and direction of current flow)
Công thức điện trở: RMR = R0 + dR · cos(2·φ)
Đặc tính dải MR
Cảm biến gia tăng từ trở
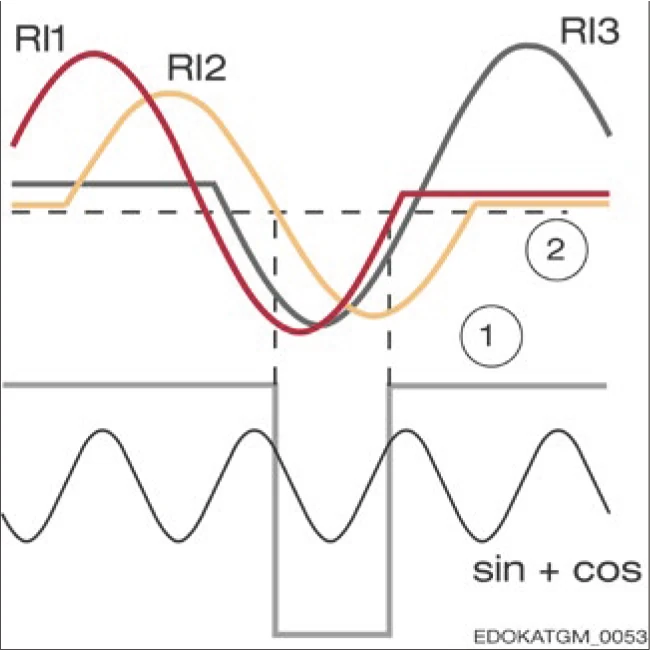
Vì điện trở của một dải MR đơn bị ảnh hưởng bởi sự thay đổi nhiệt độ và từ trường nhiễu, thông thường bốn dải được sử dụng làm cảm biến, cấu hình thành mạch cầu Wheatstone. Đặc điểm là những thay đổi giống nhau của tất cả bốn điện trở (ví dụ do nhiệt độ tăng) không tạo ra chênh lệch điện áp ở đầu ra. Để đạt được hiệu ứng có thể đo được, các điện trở phải được lệch phù hợp, ví dụ điện trở 1 tăng, 2 giảm, 3 tăng, 4 giảm. Điều này có thể thực hiện bằng cách định vị phù hợp các dải MR trong từ hóa tuần hoàn.
Theo đó, mỗi cảm biến được thích nghi với chu kỳ thang đo từ hóa của nó và chỉ có thể sử dụng với chu kỳ đó. Hơn nữa, các dải MR không được thiết kế riêng lẻ mà là các bộ nối tiếp của nhiều dải, mỗi dải cách nhau một chu kỳ từ. Chúng tôi gọi đây là các vị trí tương đương. Điều này cho phép lấy trung bình sự biến đổi của thang đo về cường độ từ hóa và chiều dài cực.
Dựa trên đường cong đặc tính bậc hai của cảm biến (giá trị cường độ từ trường đo), có thể thu được tín hiệu ban đầu bằng một nửa chiều dài chu kỳ thang đo từ. Thang đo từ của cảm biến MONORAIL AMS là 400 µm, do đó chu kỳ tín hiệu điện là 200 µm.
Cuối cùng, hai cấu trúc giống nhau được lệch pha 1/4 chu kỳ tín hiệu (50 µm), từ đó thu được tín hiệu sin và cosin, cho phép đo chiều chuyển động và khoảng cách hành trình.
Cấu trúc cảm biến sơ đồ hoàn chỉnh được thể hiện bên dưới:
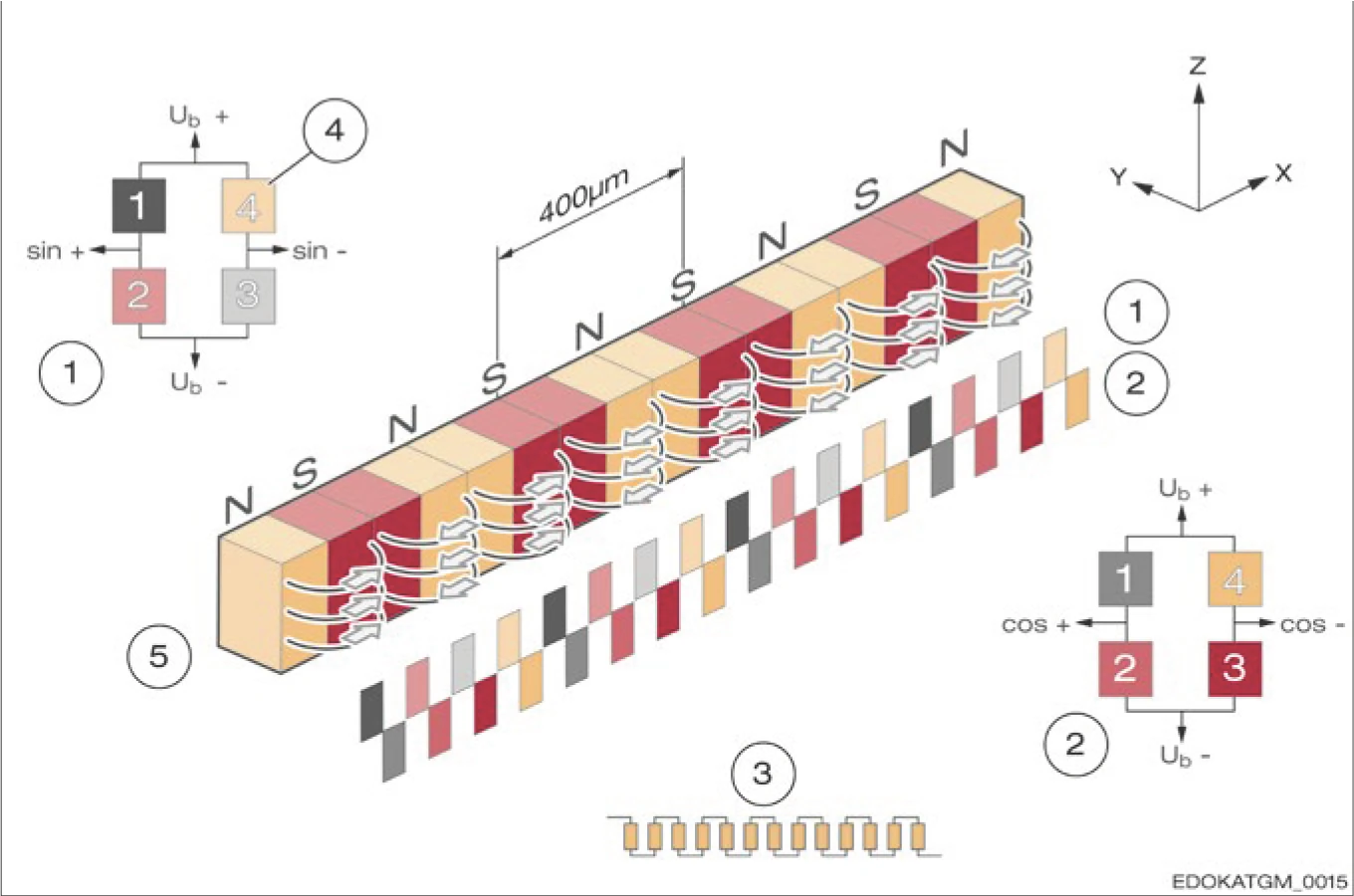
Schematic structure of sine and cosine sensors
Cấu trúc sơ đồ của cảm biến sin và cosin
Mô tả thành phần:
Cấu hình vật lý:
Vì cả hai tín hiệu đến từ cùng một vị trí trên thang đo, cảm biến này rất không nhạy với dịch chuyển ngang và quay. Trong thực tế, điều này dẫn đến các đặc tính ổn định của sự thay đổi đo lường tuần hoàn. Cường độ trường của thang đo thay đổi theo hướng y từ thang đo. Điều này khiến các từ trường triệt tiêu nhau ở khoảng cách xa thang đo. Trong phạm vi gần, ở khoảng cách khoảng một chiều dài chu kỳ, cường độ từ trường giảm theo hàm mũ với khoảng cách theo hướng y.
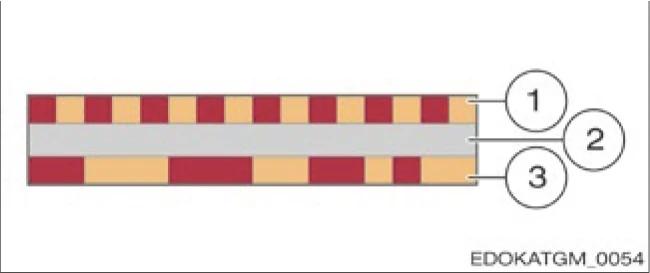
Thang đo từ tính
SCHNEEBERGER sản xuất thanh dẫn hướng thanh định hình tích hợp thang đo. Thang đo từ với từ trường thay đổi tuần hoàn (N-S-N-S-N-S...) có thể sử dụng với cảm biến MR để đo khoảng cách gia tăng.
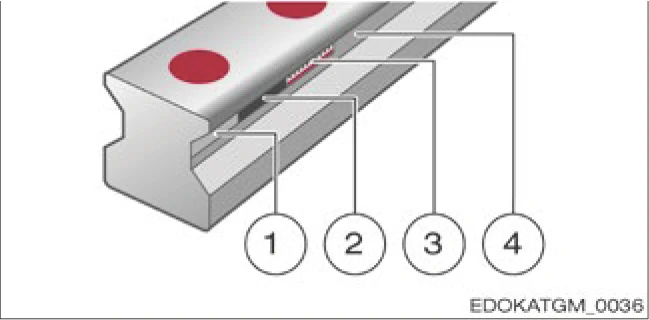
Construction of magnetic scale in profile rail
Cấu trúc thang đo từ tính trong thanh dẫn hướng định hình
Cấu trúc thang đo từ tính:
Các thành phần hệ thống
Một hệ thống AMS hoạt động đầy đủ bao gồm:
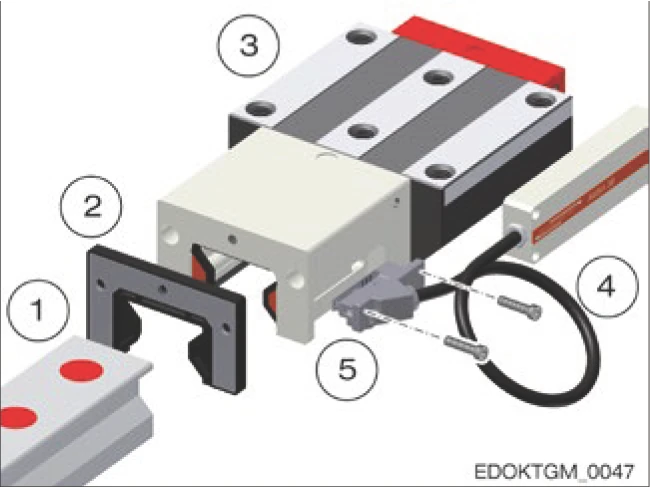
Complete AMS measuring system components
Các thành phần hệ thống đo lường AMS hoàn chỉnh
- Thanh dẫn hướng tích hợp thang đo
- Phụ kiện để lắp đặt và kết nối
- Xe trượt đo lường là đơn vị hoàn chỉnh
- Vít để lắp đặt đầu đọc
- Đầu đọc bao gồm cảm biến và điện tử
Xe trượt đo lường bao gồm một xe trượt MONORAIL với vỏ lắp ở một bên. Vỏ chứa rãnh cắt với bề mặt đỡ để lắp đầu đọc. Đầu đọc được kẹp chặt vào vỏ bằng vít, giúp dễ dàng thay thế.
Lấy mẫu tiếp xúc
Để xử lý đúng các tín hiệu gia tăng, cần duy trì khoảng cách làm việc nhất quán giữa cảm biến và thang đo. Vì dung sai nhỏ này không thể đạt được bằng kết cấu điều chỉnh cứng, hệ thống đo khoảng cách AMS sử dụng nguyên lý đo trượt tiếp xúc.
Cảm biến MR được đóng gói trong vỏ đế trượt, được giữ ở vị trí nằm ngang bằng lò xo lá, và được ép lên thang đo bằng lò xo nén. Vỏ đế trượt có bề mặt trượt mài, qua đó khoảng cách làm việc không đổi giữa cảm biến và thang đo được thiết lập và duy trì.
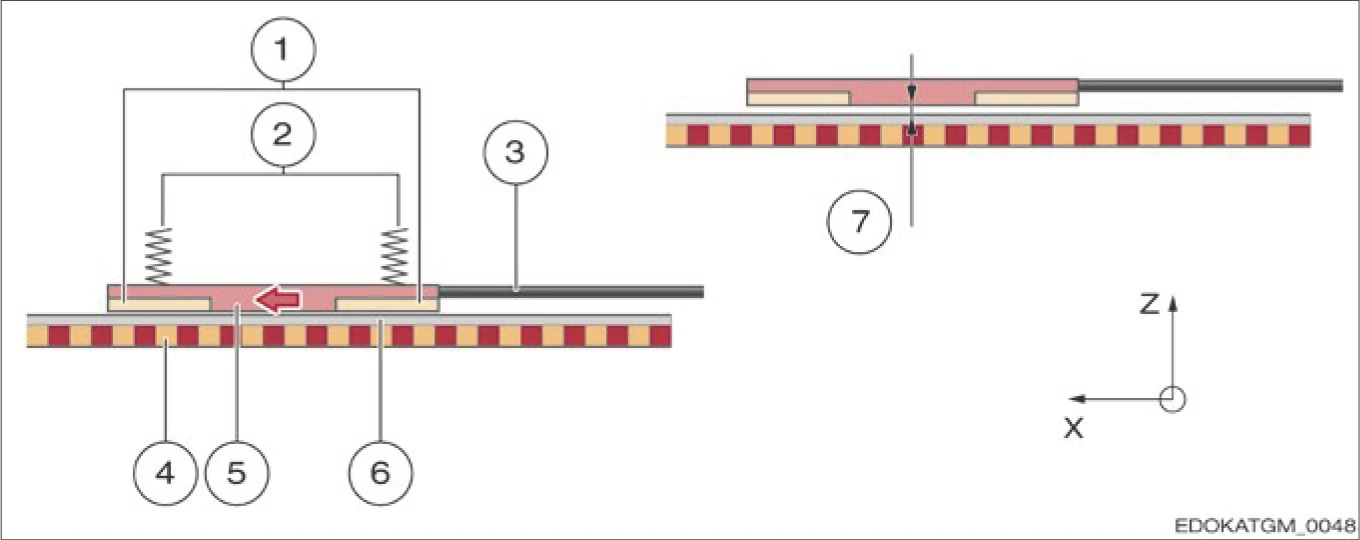
Contact sampling assembly for AMS distance measuring systems
Cụm lấy mẫu tiếp xúc của hệ thống đo khoảng cách AMS
Mô tả thành phần:
Các đế cũng tạo thành cạnh gạt bụi mà qua đó các hạt lớn và chất lỏng không thể đi qua. Ngoài ra, các gạt bụi của vỏ nêu trên phải còn nguyên vẹn để đảm bảo điều kiện hoạt động hiệu quả cho lấy mẫu tiếp xúc.
Kết cấu này đảm bảo tất cả các linh kiện dễ mòn và điện tử cụ thể đều nằm trong đầu đọc. Do lắp đặt từ bên cạnh, đầu đọc có thể thay thế rất dễ dàng. Dung sai sản xuất nhỏ đảm bảo đầu đọc có thể thay thế dễ dàng tại hiện trường trong khi thanh dẫn hướng có thang đo vẫn đứng yên.
3.1.4 Hệ thống đo khoảng cách
Nội suy
Đối với các ứng dụng đo khoảng cách, nội suy đề cập đến việc chuyển đổi tín hiệu đầu vào tương tự thành tín hiệu đầu ra kỹ thuật số có chu kỳ tín hiệu nhỏ hơn. Điều này là cần thiết vì không thể tạo ra số đếm và/hoặc số đọc vị trí trực tiếp từ tín hiệu tương tự.
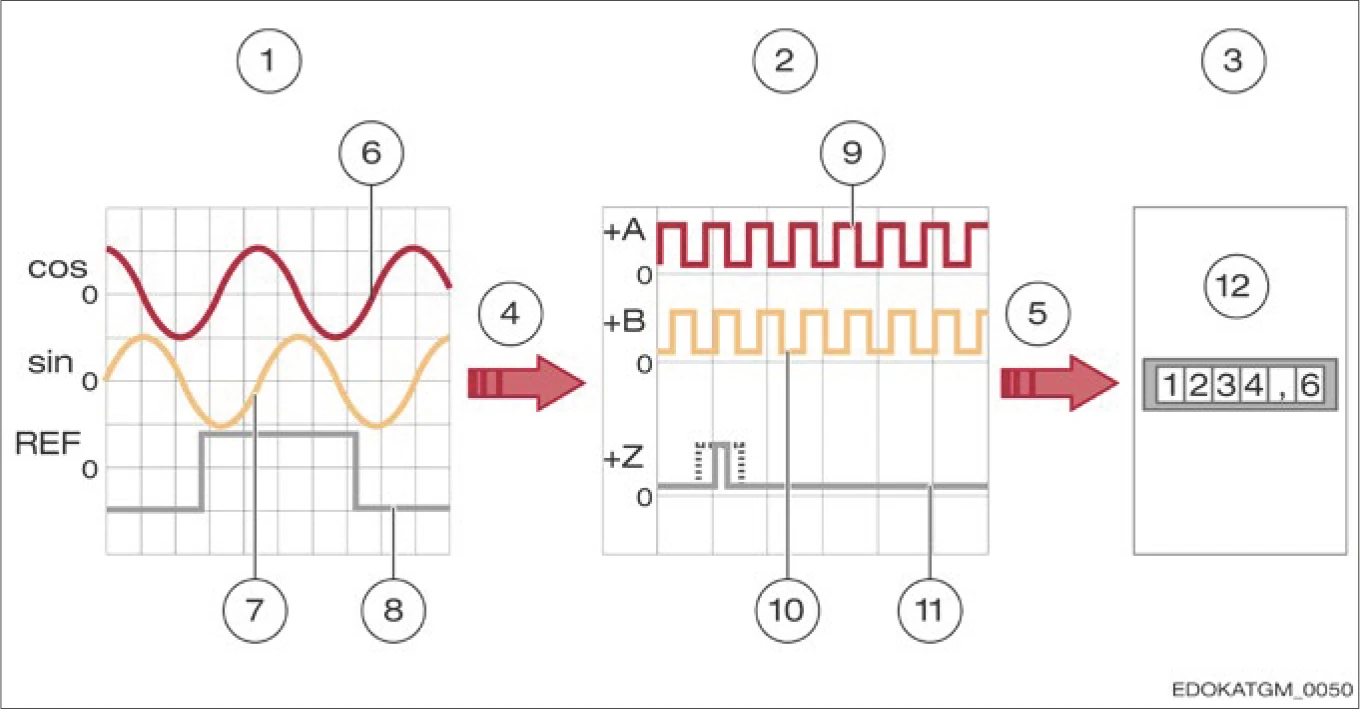
The analogue input signals (sin, cos, Ref) are interpolated (red arrow) with the digital output signals (+A, +B, +Z). Inverted signals are not represented.
Các tín hiệu đầu vào tương tự (sin, cos, Ref) được nội suy (mũi tên đỏ) tạo ra tín hiệu đầu ra kỹ thuật số (+A, +B, +Z). Tín hiệu đảo pha không được hiển thị trong hình này.
Analogue input signal: sin, cos, REF
Analogue input signal (sin)
Digital output signal: +A, +B, +Z
Analogue input signal (REF)
Downstream electronics
Digital output signal (+A)
Interpolation
Digital output signal (+B)
Signal transmission
Digital output signal (+Z)
Analogue input signal (cos)
Measuring counter, PC, controller for machine etc.
Vì mục đích này, hệ số nội suy xác định tỷ lệ chu kỳ tín hiệu của tín hiệu đầu vào tương tự với tín hiệu đầu ra kỹ thuật số.
Truyền tín hiệu và đánh giá
Signal transmission and evaluation
Tín hiệu kỹ thuật số bao gồm hai tín hiệu gia tăng +A và +B và tín hiệu tham chiếu +R, được truyền đến điện tử hạ lưu. Đây có thể là bộ đếm đo lường đơn giản, PC hoặc bộ điều khiển máy. Điện tử hạ lưu xác định giá trị vị trí từ tín hiệu kỹ thuật số bằng cách đếm các cạnh tín hiệu. Chiều đếm được xác định bởi mức của kênh liên quan. Tùy thuộc vào số cạnh được đánh giá, chúng tôi gọi là:
Đánh giá một cạnh
Chỉ đếm một cạnh của một kênh. Một bước đo = một chu kỳ tín hiệu kỹ thuật số.
Đánh giá hai cạnh
Đếm cạnh lên và cạnh xuống của một kênh. Một bước đo = nửa chu kỳ tín hiệu.
Đánh giá bốn cạnh
Đếm tất cả các cạnh của cả hai kênh. Một bước đo = một phần tư chu kỳ tín hiệu (độ phân giải cao nhất).
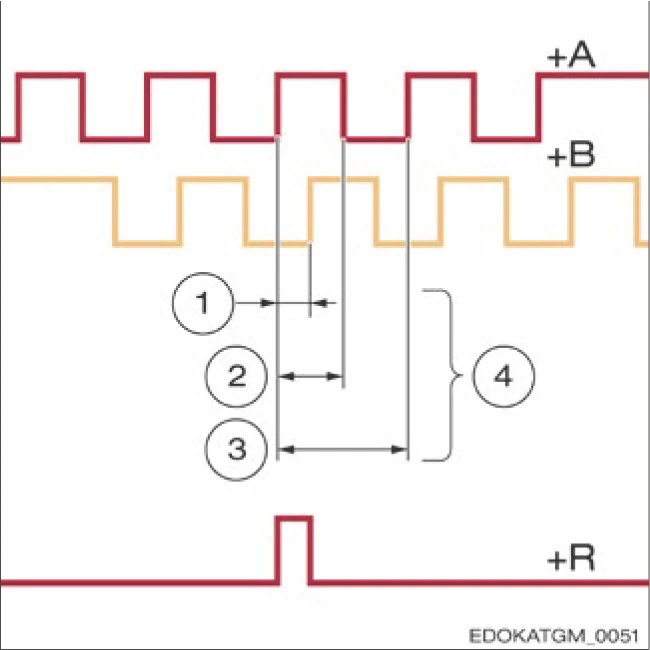
Comparison of edge evaluation methods
So sánh các phương pháp đánh giá cạnh
Kiểm soát biên độ (AGC - Điều khiển khuếch đại tự động)
Kiểm soát biên độ đề cập đến chức năng điều chỉnh biên độ đầu ra đến một giá trị cụ thể của điện tử đánh giá SCHNEEBERGER AMS. Trong hệ thống AMS, các giá trị tức thời của tín hiệu sin và cosin được số hóa, và biên độ được tính toán theo đó. Giá trị tính toán được so sánh với giá trị danh định, và điện áp cầu Ub của cảm biến MR được điều chỉnh phù hợp. Kết quả là thu được các giá trị đầu ra điện áp ổn định. Sau khi điều chỉnh, các giá trị tức thời tốt hơn mới được tạo ra.
Thông số MONORAIL AMS
- Thời gian điều khiển: Từ 2 kHz đến 10 kHz
- Tự động điều chỉnh điện áp cầu để duy trì đầu ra ổn định
- Liên tục tối ưu hóa chất lượng tín hiệu
Chức năng cảm biến nguồn (Power Sense Function)
Tất cả sản phẩm AMS đều được trang bị dây cảm biến nguồn (xem bố cục chân cho phản hồi điện áp nguồn) để bù điện áp rơi trong các đường dây nguồn dài. Nếu bộ điều khiển đang sử dụng hỗ trợ chức năng này, chúng tôi khuyến nghị sử dụng để đảm bảo độ tin cậy hoạt động của đầu đọc.
Đặc điểm chính
- Dây cảm biến nguồn được tích hợp trong tất cả sản phẩm AMS
- Bù điện áp rơi trong các đường dây nguồn dài
- Cải thiện độ tin cậy chức năng của đầu đọc
- Chức năng tùy chọn (yêu cầu hỗ trợ bộ điều khiển)
Cấp chính xác (Accuracy Class)
Cấp chính xác xác định độ lệch đo lường tối đa dự kiến của hệ thống trong các điều kiện vận hành được chỉ định. Hệ thống đo khoảng cách có cấp chính xác 5 µm cho phép độ lệch ±5 µm. Để so sánh, cấp chính xác được chỉ định dựa trên chiều dài tham chiếu 1 mét.
Các khái niệm chính
- Định nghĩa: Độ lệch đo lường tối đa dự kiến
- Điều kiện: Vận hành trong các điều kiện môi trường được chỉ định
- Ví dụ: Cấp chính xác 5 µm = độ lệch ±5 µm
- Chiều dài tham chiếu: 1 mét (để chỉ định thông số)
Độ phân giải (Resolution)
Độ phân giải mô tả sự thay đổi vị trí nhỏ nhất có thể đo được trong hệ thống đo lường. Nó được xác định bởi chu kỳ tín hiệu tương tự, hệ số nội suy và quy trình đánh giá (thời gian tích hợp hoặc tốc độ lấy mẫu). Ví dụ, với hệ số nội suy được đặt ở 100 và chu kỳ tín hiệu đầu vào 200 µm, chu kỳ tín hiệu đầu ra là 2 µm, và với đánh giá bốn cạnh trong bộ điều khiển, độ phân giải là 0,5 µm.
Tính toán độ phân giải
- Phụ thuộc vào: Chu kỳ tín hiệu tương tự × Hệ số nội suy × Phương pháp đánh giá
- Ví dụ: Tín hiệu 200 µm × 100 nội suy = tín hiệu đầu ra 2 µm
- Đánh giá bốn cạnh: 2 µm ÷ 4 = 0,5 µm độ phân giải
Tốc độ lấy mẫu (Sampling Rate)
Tốc độ lấy mẫu mô tả tần số tại đó tín hiệu tương tự được lấy mẫu trong mỗi khoảng thời gian. Thông thường khoảng thời gian là một giây, do đó đơn vị của tốc độ lấy mẫu là Hz. Theo định lý Nyquist-Shannon, tần số lấy mẫu phải ít nhất gấp đôi tần số tín hiệu gốc để đảm bảo tái tạo gần như hoàn chỉnh tín hiệu gốc.
Các nguyên lý chính
- Định nghĩa là: Tần số trên mỗi khoảng thời gian
- Đơn vị tiêu chuẩn: Hz (mẫu mỗi giây)
- Định lý Nyquist-Shannon: Tần số lấy mẫu ≥ 2 × Tần số tín hiệu
- Đảm bảo: Tái tạo tín hiệu chính xác
Sai số đảo chiều / Hiện tượng trễ (Reversal Error/Hysteresis)
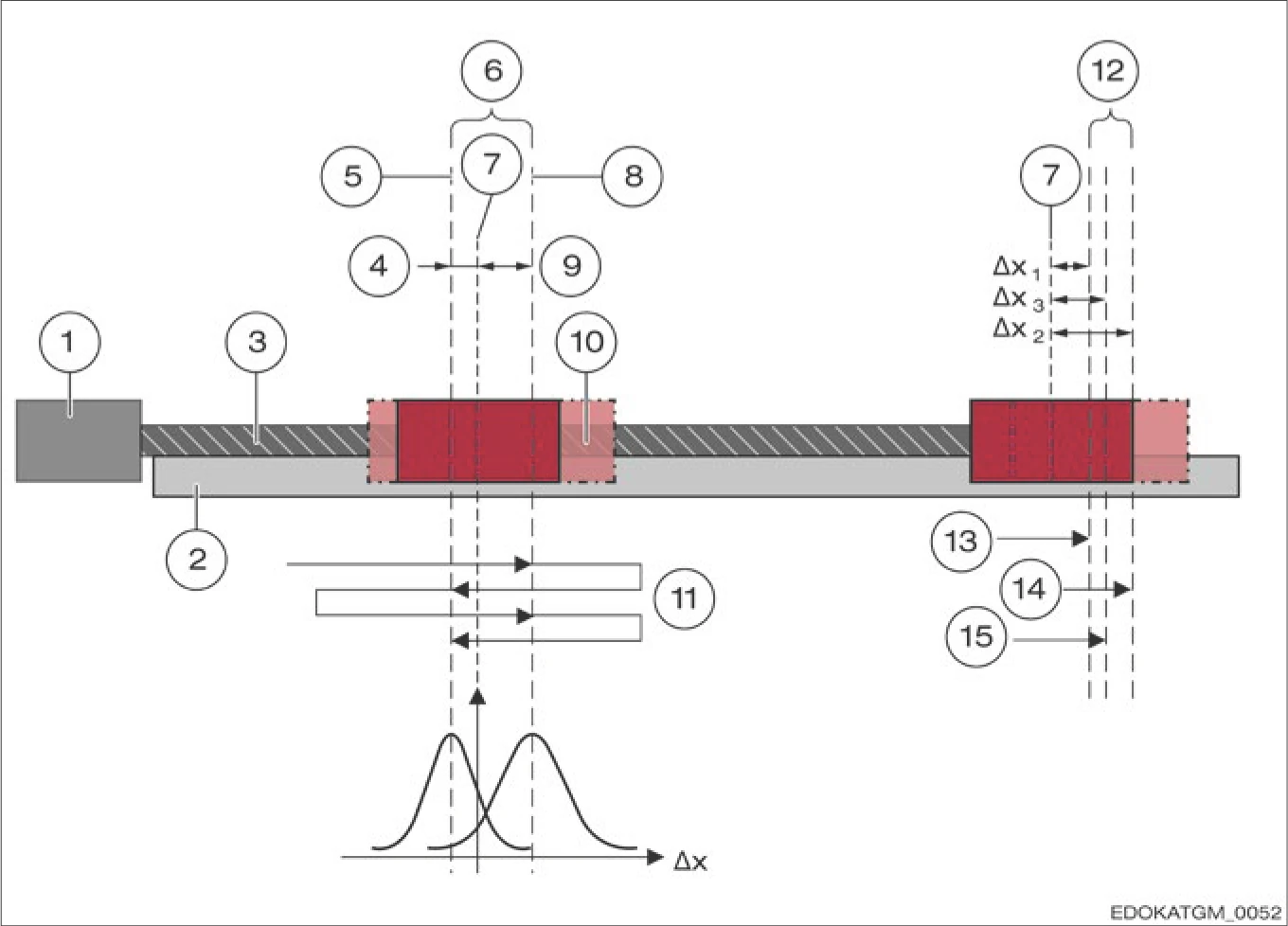
Nếu các phép đo độ lặp lại được thực hiện xen kẽ theo chiều ngược lại sử dụng thiết lập kiểm tra phù hợp trong mỗi trường hợp, có thể tìm thấy sự khác biệt vị trí trung bình của hệ thống đo khoảng cách giữa tiếp cận từ bên phải và tiếp cận từ bên trái. Sự khác biệt này được gọi là sai số đảo chiều hoặc hiện tượng trễ. SCHNEEBERGER chỉ định giá trị này trong bảng dữ liệu kỹ thuật. Độ lặp lại một chiều thường thấp hơn đáng kể so với giá trị hiện tượng trễ được chỉ định.
Độ lặp lại (Repeatability)
Độ lặp lại một chiều của hệ thống đo lường thường được hiểu là khả năng của một hệ thống cụ thể lặp lại kết quả trong các điều kiện môi trường hoàn toàn giống nhau. Trong đánh giá này, phải biết sai số đo và đưa vào phân tích. Độ lặp lại của máy công cụ có thể được xác định bằng các phương pháp đơn giản cho một vị trí cụ thể và một chiều hành trình cụ thể. Khi đánh giá độ lặp lại, nhiều phép đo được hoàn thành và giá trị trung bình số học cùng độ lệch chuẩn được tính toán.
Hysteresis and repeatability measurement diagram
Sơ đồ đo hiện tượng trễ và độ lặp lại
Sơ đồ đo lường:
Định vị tham chiếu (Referencing)
Hệ thống đo gia tăng (ví dụ AMS-3B và AMS-4B) không thể xác định vị trí tuyệt đối sau khi bật nguồn, do đó một rãnh từ khác được thêm vào rãnh gia tăng, đó là rãnh tham chiếu. Có thể thiết lập các điểm tham chiếu riêng lẻ, lưới điểm tham chiếu hoặc các điểm tham chiếu mã hóa khoảng cách trên rãnh tham chiếu này. Cần thực hiện di chuyển tham chiếu để tham chiếu hệ thống.
Sau đó bộ đếm có thể sử dụng tín hiệu tham chiếu để sửa đổi bộ đếm nội bộ thành giá trị được chỉ định. Trong quá trình này, bộ đếm nhận ra các vị trí được xác định trước của các tín hiệu gia tăng so với nhau, thường là SIN = COS và cả hai đều lớn hơn không, như thông tin bổ sung REF = "high". Hình dưới đây hiển thị đường tín hiệu đảo, nghĩa là các giá trị âm của tín hiệu được mô tả.
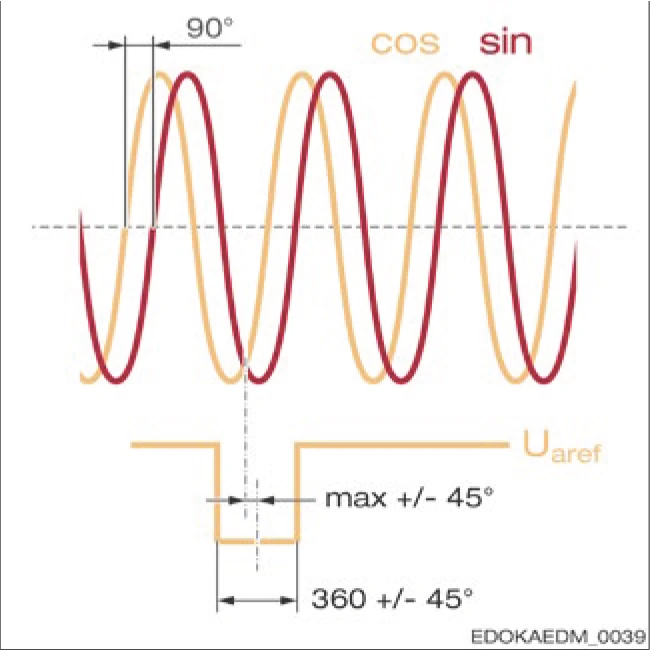
Reference signal interfaces (analogue voltage)
Giao diện tín hiệu tham chiếu (điện áp tương tự)
Nhận dạng tín hiệu tham chiếu
- SIN = COS Quan hệ tín hiệu
- Cả hai tín hiệu đều lớn hơn không
- Tín hiệu REF = "high"
- Cần di chuyển tham chiếu để thiết lập vị trí
- Giao diện điện áp tương tự: TSU/TRU/TMI
- Chu kỳ tín hiệu: 200 µm
Điểm tham chiếu riêng lẻ (Individual Reference Point)
Điểm tham chiếu riêng lẻ đại diện cho chức năng đơn giản nhất của rãnh tham chiếu, có thể được đặt ở bất kỳ vị trí nào trên thang đo. Tại SCHNEEBERGER, một điểm tham chiếu bao gồm ba dấu tham chiếu từ tính, được lấy mẫu bằng cầu MR riêng biệt mà không lấy trung bình. Một dữ liệu tham chiếu đại diện cho cạnh lên của xung tham chiếu, một cái khác là cạnh xuống. Dữ liệu tham chiếu thứ ba là dự phòng, được sử dụng để cải thiện độ tin cậy hoạt động của hệ thống nhận dạng điểm tham chiếu.
Reference point identification system
Hệ thống nhận dạng điểm tham chiếu
Các thành phần hệ thống:
Lưới điểm tham chiếu (Reference Point Grid)
Trong trường hợp lưới điểm tham chiếu, nhiều điểm tham chiếu được đặt cách đều nhau dọc theo thang đo. Khách hàng chọn một trong các điểm tham chiếu này để tham chiếu trục.
So với các điểm tham chiếu riêng lẻ, ưu điểm của lưới trước tiên là rút ngắn hành trình tham chiếu bằng cách áp dụng có mục tiêu các thành phần bổ sung bên ngoài (cam, công tắc tiệm cận, v.v.), nhưng cũng cho phép vận hành nhiều xe trượt đo lường trên một thanh dẫn hướng. Vì mục đích này, các điểm tham chiếu riêng lẻ dọc theo thang đo được gán cho các xe trượt đo lường khác nhau để tham chiếu liên quan.
Ưu điểm so với điểm tham chiếu riêng lẻ
- Giảm khoảng cách hành trình tham chiếu
- Khả năng hỗ trợ nhiều xe trượt
- Các tùy chọn lựa chọn linh hoạt
- Tích hợp tốt hơn với tự động hóa máy
Mã hóa khoảng cách (Distance Coding)
Trong trường hợp các điểm tham chiếu mã hóa khoảng cách, chúng được sắp xếp trên thang đo sao cho mỗi khoảng cách giữa hai điểm tham chiếu chỉ xuất hiện một lần. Ví dụ, nếu bạn vượt qua ba điểm tham chiếu trên thanh dẫn hướng hệ thống đo khoảng cách, bộ điều khiển có thể tính toán vị trí tuyệt đối. Đây là tiêu chuẩn công nghiệp được nhiều nhà sản xuất bộ điều khiển hỗ trợ.
Giá trị 100 thường được chỉ định là chu kỳ cơ sở, đại diện cho khoảng cách cần di chuyển trong trường hợp xấu nhất để hoàn thành tham chiếu. Chu kỳ cơ sở xác định chiều dài mã hóa tối đa. Đối với các trục ngắn, nên chọn chu kỳ cơ sở nhỏ hơn để giảm thiểu khoảng cách hành trình tối đa cần thiết.
Do đó, SCHNEEBERGER cung cấp các điểm tham chiếu mã hóa khoảng cách theo yêu cầu khách hàng với các chu kỳ cơ sở khác nhau cho sản phẩm AMS của mình.
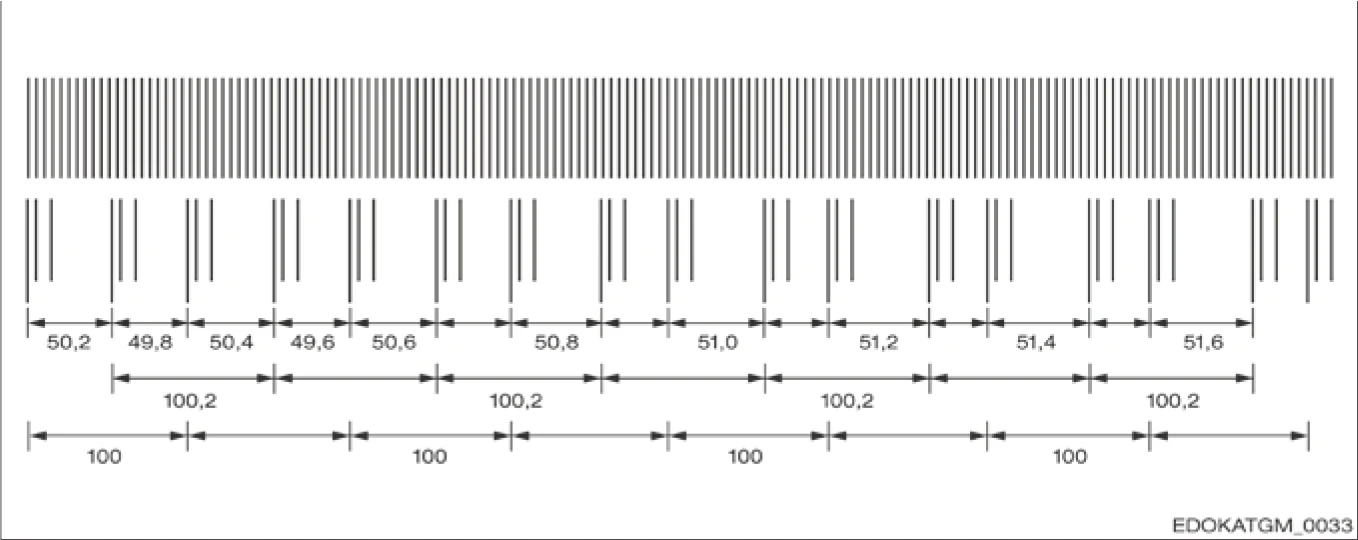
Distance coding principle diagram
Sơ đồ nguyên lý mã hóa khoảng cách
Mã hóa tuyệt đối (Absolute Coding)
Đối với hệ thống đo tuyệt đối, một rãnh với mã hóa tuyệt đối được sử dụng thay vì rãnh tham chiếu. Hệ thống mã hóa này được áp dụng theo kiểu nối tiếp trên một rãnh hoặc theo kiểu song song trên nhiều rãnh. Về lý thuyết, có thể đo khoảng cách chỉ sử dụng rãnh này, nhưng vì độ phân giải của mã này tương đối nhỏ, các rãnh mã hóa tuyệt đối thường được kết hợp với các rãnh gia tăng. Do đó, mã tuyệt đối xác định chu kỳ tín hiệu mà hệ thống đo lường đang ở trong đó, và độ phân giải tinh trong chu kỳ tín hiệu đó được thu được bằng cách nội suy tín hiệu gia tăng.
Các hình dưới đây cung cấp ví dụ về hệ thống mã hóa:
Mã hóa nối tiếp (Serial-coded)
Serial-coded interpolation track
Rãnh nội suy mã hóa nối tiếp
Mô tả thành phần:
Mã hóa song song (Parallel-coded)
Parallel-coded pulse disc
Đĩa xung mã hóa song song
Đặc điểm:
Trong trường hợp rãnh mã hóa nối tiếp, vị trí tuyệt đối chỉ có thể xác định bằng cách so sánh hai chu kỳ tín hiệu liên tiếp. Do đó, mặc dù thực tế là vị trí tuyệt đối đã biết, hai quy trình khác nhau đang được sử dụng.
Một khả năng là sử dụng các cảm biến có độ dài tương ứng đủ dài để chúng bao phủ mã cần thiết để xác định vị trí tuyệt đối. Do đó, chúng có thể xác định vị trí tuyệt đối trực tiếp ở bất kỳ vị trí nào.
Khả năng khác là xây dựng điện tử đánh giá trên cơ sở hai kênh. Ngay cả khi máy tắt, một trong các kênh luôn hoạt động (được đệm pin) và xác định bất kỳ thay đổi vị trí nào của trục. Khi máy được bật, thông tin vị trí độ phân giải thấp này được kết hợp với thông tin vị trí độ phân giải cao từ kênh kia để đạt được vị trí tuyệt đối chính xác.
SCHNEEBERGER sử dụng quét đệm pin để xác định vị trí tuyệt đối. Vì mục đích này, một rãnh tham chiếu mã hóa khoảng cách đặc biệt được áp dụng lên thanh dẫn hướng như một rãnh tuyệt đối. Hệ thống đo lường xác định khoảng cách giữa ba dấu tham chiếu liền kề trong quá trình này và xác định vị trí tuyệt đối tức thời bằng cách khớp các giá trị xác định với ma trận lưu trữ. Trong ví dụ này, đầu đọc đi qua ba dấu tham chiếu và xác định khoảng cách "1" (Mã Y) và "5" (Mã X). Sau đó có thể gán vị trí tuyệt đối "Pos 1:5" cho hai giá trị đo này trong ma trận hai chiều.
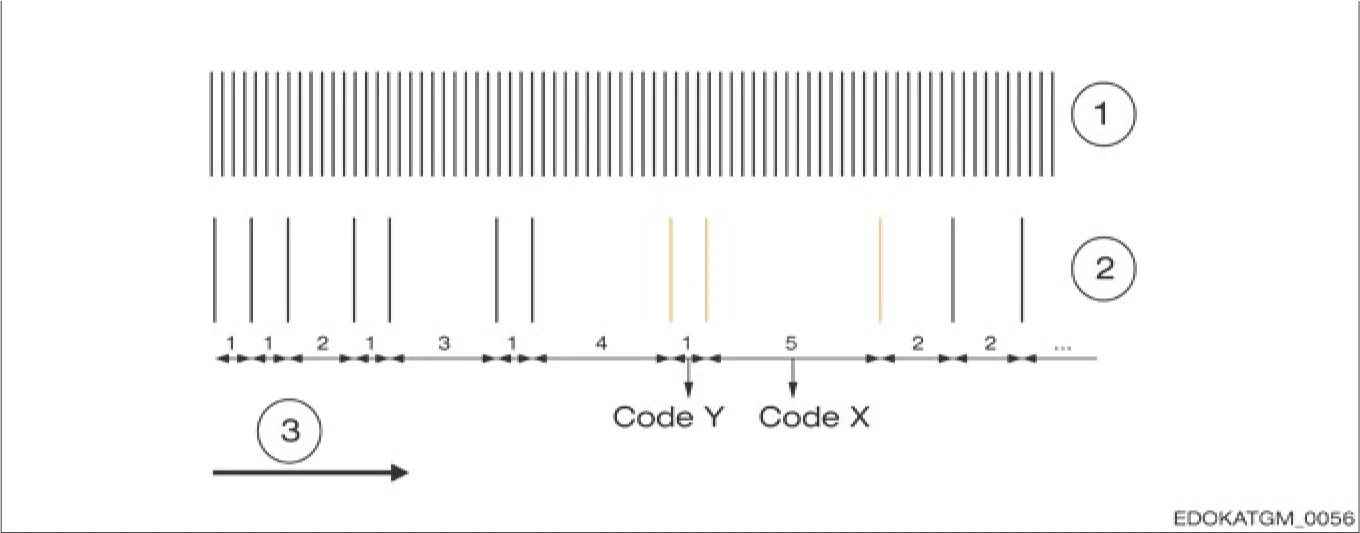
Example for determining position by means of battery-buffered scanning
Ví dụ xác định vị trí bằng quét đệm pin
Các thành phần sơ đồ:
Sai lệch đo khoảng cách một chiều
One-dimensional distance measuring deviation
Ma trận hai chiều
Two-dimensional matrix
| Mã Y/Mã X (Code Y/Code X) | 1 | 2 | 3 | 4 | 5 | ... |
|---|---|---|---|---|---|---|
| 1 | Pos 1;1 | Pos 1;2 | Pos 1;3 | Pos 1;4 | Pos 1;5 | ... |
| 2 | Pos 2;1 | Pos 2;2 | Pos 2;3 | Pos 2;4 | Pos 2;5 | ... |
| 3 | Pos 3;1 | Pos 3;2 | Pos 3;3 | Pos 3;4 | Pos 3;5 | ... |
| 4 | Pos 4;1 | Pos 4;2 | Pos 4;3 | Pos 4;4 | Pos 4;5 | ... |
| 5 | Pos 5;1 | Pos 5;2 | Pos 5;3 | Pos 5;4 | Pos 5;5 | ... |
| ... | ... | ... | ... | ... | ... | Pos Y;X |
Để đánh giá thang đo, SCHNEEBERGER sử dụng các quy trình hỗ trợ "Hướng dẫn VDI/VDE 2617 cho kiểm tra đo khoảng cách sử dụng DIN EN ISO 10360-2". Trong quá trình này, trọng tâm là đạt được lợi ích cao nhất có thể cho khách hàng về mặt thông số kỹ thuật. Dữ liệu kỹ thuật sử dụng ba thông số sai lệch đo khoảng cách khác nhau:
- Sai lệch tuần hoàn (Periodic deviation)
- Sai lệch đo khoảng cách trên 40 mm (Distance measuring deviation over a 40 mm route)
- Sai lệch đo khoảng cách trên 1 m (Distance measuring deviation over a 1 m route)
Để bảo đảm chất lượng thang đo, các đường giới hạn cho độ lệch cho phép được thiết lập. Các đường giới hạn và sai lệch đo cho các chiều dài tham chiếu khác nhau thường được khách hàng sử dụng đã được liệt kê trong các biểu đồ.
Do đó, nội suy giữa các thông số của hệ thống đo lường SCHNEEBERGER được cho phép.
Sai lệch tuần hoàn (Periodic Deviations)
Tất cả hệ thống đo khoảng cách gia tăng đều kèm theo hiệu ứng sai lệch tuần hoàn có bước sóng chính xác tương ứng với bước thang đo hoặc phân số của bước thang đo. Sai lệch tuần hoàn hay sai lệch sóng ngắn này được gây ra bởi các sai lệch nhỏ trong cảm biến hoặc xử lý tín hiệu điện. Các tín hiệu sin và cosin do đó lệch khỏi dạng toán học chính xác. Các sai lệch có thể được phân loại theo bậc (họa âm).
| Chu kỳ KWF (KWF Period) | Nguyên nhân sai lệch (Deviation occurs due to) |
|---|---|
| 1 chu kỳ tín hiệu (1 signal period) | Dịch chuyển sin/cosin (Sine/cosine offset) |
| 1/2 chu kỳ tín hiệu (1/2 signal period) | Biên độ sin và cosin khác nhau (Sine and cosine amplitude are different) |
| 1/3 - 1/8 chu kỳ tín hiệu (1/3 - 1/8 signal period) | Cảm biến cung cấp tín hiệu khác biệt cơ bản so với dạng sóng sin (Sensors deliver a signal fundamentally different from sine wave shape) |
Sai số nội suy (Interpolation Error)
Nếu sai lệch tuần hoàn chỉ xảy ra trong quá trình số hóa và tính toán vị trí, chúng tôi gọi đó là sai số nội suy. Trong một số trường hợp, điều này có thể dễ dàng xảy ra khi mạch phát và mạch thu không được khớp chính xác với nhau.
Sai số so sánh / Sai số Abbe (Comparator Error / Abbe Error)
Sai số so sánh, còn gọi là sai số Abbe, là sai lệch hệ thống xảy ra khi trục tiêu chuẩn chiều dài và trục tiêu chuẩn khoảng cách không trùng nhau. Nguyên nhân sai lệch là các chuyển động quay nhỏ trong thiết kế trục, ảnh hưởng đến kết quả đo lường.
Tổng kết phương pháp xác định vị trí tuyệt đối
1. Phương pháp dựa trên cảm biến:
- Cảm biến dài bao phủ mã cần thiết
- Xác định trực tiếp vị trí tuyệt đối
- Không cần so sánh chu kỳ tuần tự
2. Phương pháp hai kênh đệm pin:
- Một kênh luôn hoạt động (đệm pin)
- Kênh thứ hai độ phân giải cao khi có điện
- Khả năng theo dõi vị trí khi máy tắt
- Kết hợp độ phân giải thấp và cao khi khởi động máy