5 Vận hành
5.1 Truyền tín hiệu
Để tăng khả năng chống nhiễu, chúng tôi khuyến nghị sử dụng tín hiệu vi sai theo tiêu chuẩn RS-422. Truyền tín hiệu cân bằng với các pha tín hiệu ngược chiều có thể ngăn chặn gần như hoàn toàn nhiễu loạn. Hầu hết các bộ điều khiển truyền động hiện đại đều hỗ trợ tùy chọn này.
Cặp dây xoắn được sử dụng để truyền các tín hiệu (A+, B+, R+) và các tín hiệu đảo tương ứng (A-, B-, R-). Tại bộ nhận, tín hiệu được tạo ra bằng cách lấy hiệu giữa hai mức tín hiệu.
Với truyền tín hiệu đơn đầu, mức tín hiệu thay đổi so với điện thế tham chiếu. Phương thức truyền tín hiệu này dễ bị nhiễu hơn. Biên độ tín hiệu trong trường hợp này bằng một nửa so với tín hiệu truyền vi sai.
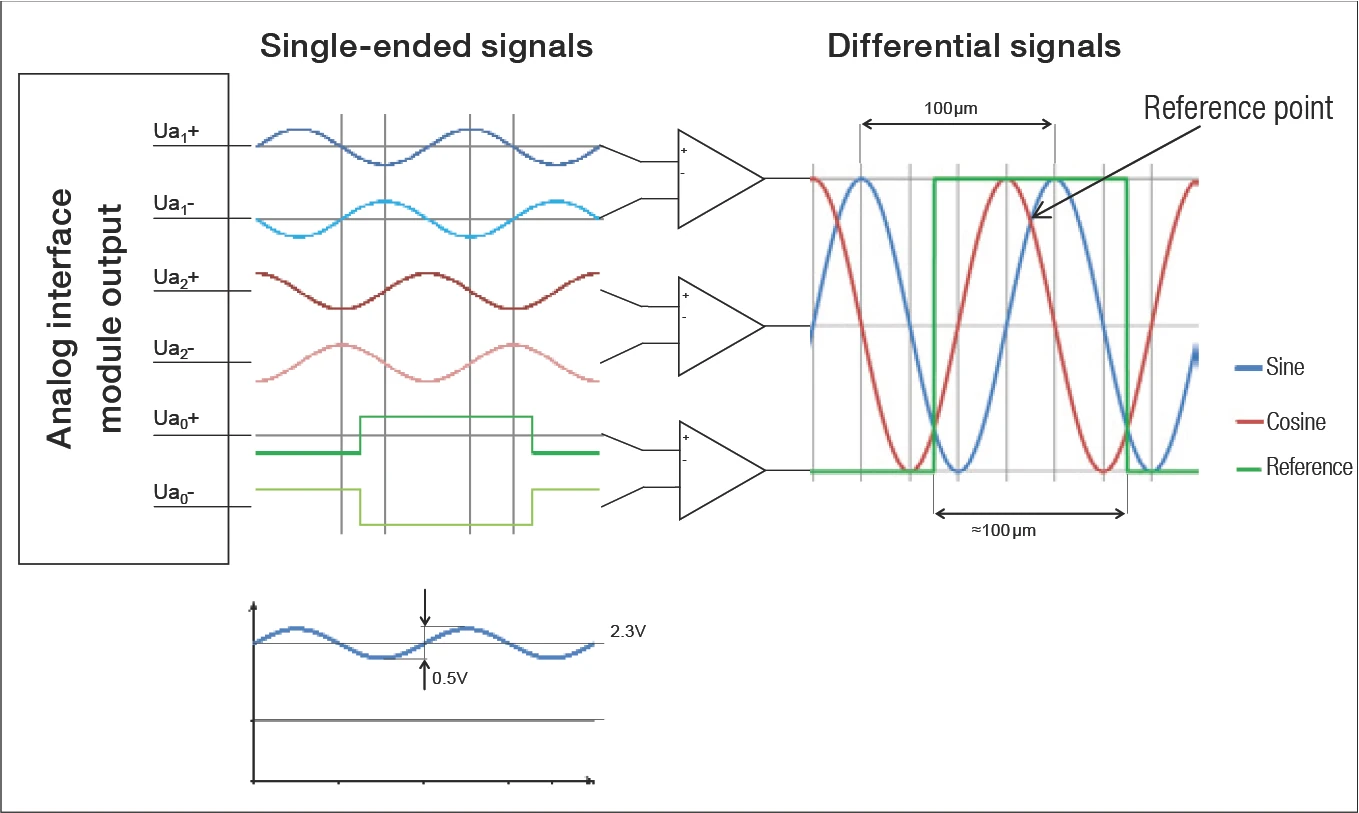
Tín hiệu đầu ra tương tự tại mô-đun giao diện. Có thể sử dụng theo kiểu đơn đầu (tham chiếu đến đất) hoặc vi sai.
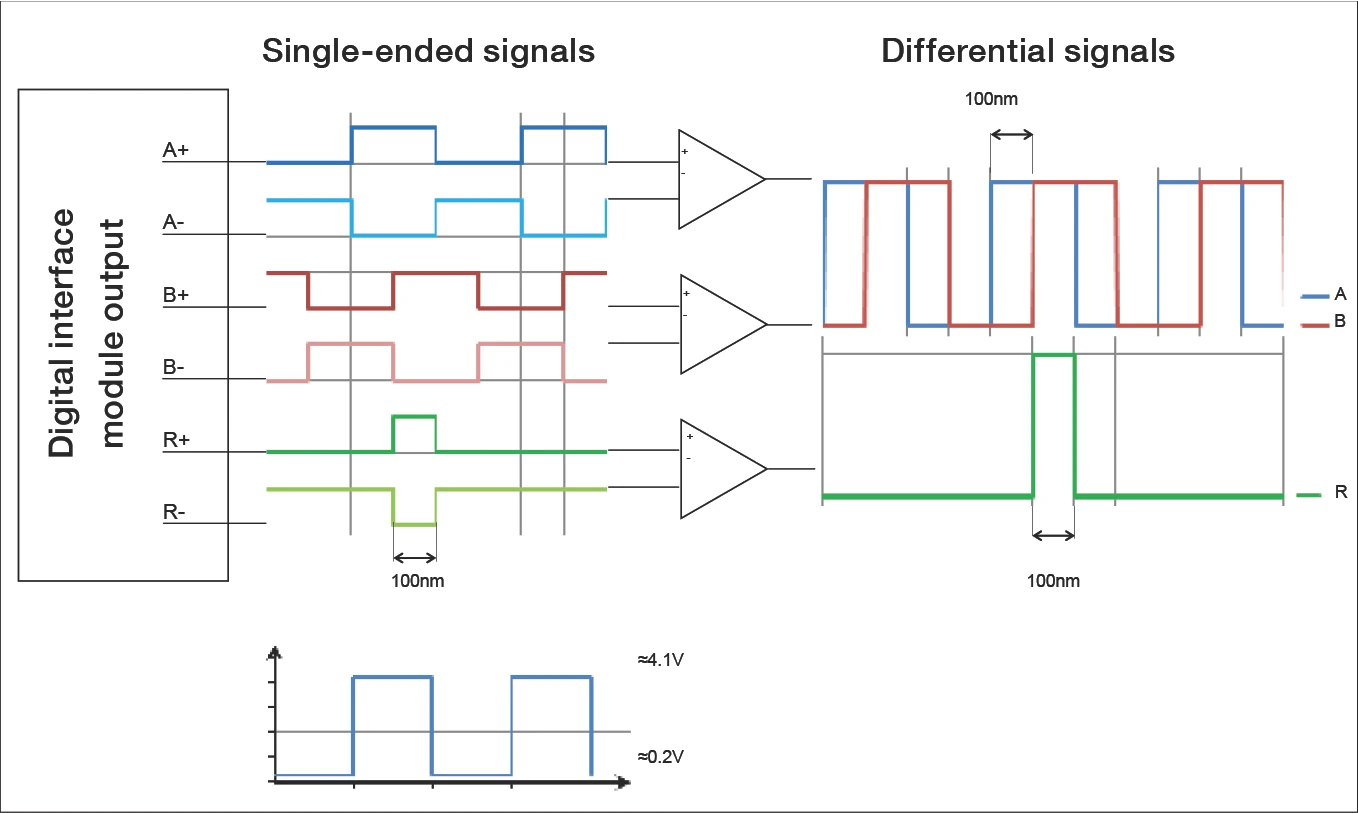
Tín hiệu đầu ra số tại mô-đun giao diện. Có thể sử dụng theo kiểu đơn đầu (tham chiếu đến đất) hoặc vi sai.
Điện trở kết thúc bus RS 422 nên là 120 Ohm.
5.2 Định nghĩa chân
5.2.1 Mô-đun giao diện tương tự và số
Đầu nối D-Sub 9 chân đực hoặc cọc hàn:
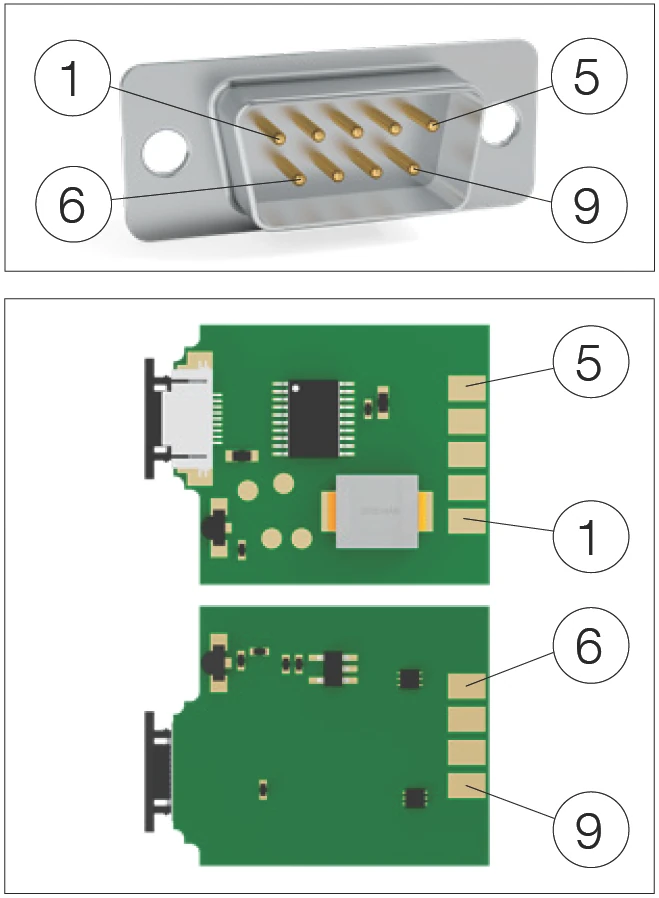
Sơ đồ chân đầu nối D-Sub 9
| Chân | Tín hiệu tương tự | Tín hiệu số | Mô tả |
|---|---|---|---|
| 1 | Ua1- | A - | Tín hiệu vuông pha |
| 2 | 0V | 0V | Đất |
| 3 | Ua2- | B - | Tín hiệu vuông pha |
| 4 | ERR NOT | ERR NOT | Tín hiệu lỗi (Low = Lỗi) |
| 5 | Ua0 - | R - | Tín hiệu tham chiếu |
| 6 | Ua1 + | A + | Tín hiệu vuông pha |
| 7 | + 5V DC | + 5V DC | Điện áp nguồn |
| 8 | Ua2 + | B + | Tín hiệu vuông pha |
| 9 | Ua0 + | R + | Tín hiệu tham chiếu |
Hình 1: Kết nối chân của đầu nối D-Sub 9 tại mô-đun giao diện
Hình 2: Kết nối chân tại mô-đun giao diện với cọc hàn
Đầu nối Micro Match 10 chân đực:
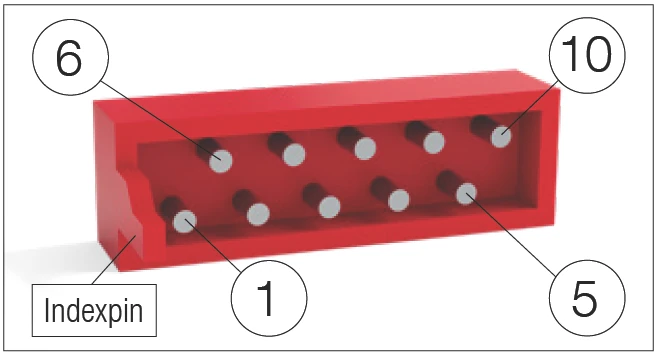
Kết nối chân đầu nối Micro Match tại mô-đun giao diện
| Chân | Tín hiệu tương tự | Tín hiệu số | Mô tả |
|---|---|---|---|
| 1 | nc | nc | |
| 2 | Ua1 + | A + | Tín hiệu vuông pha |
| 3 | + 5V DC | + 5V DC | Điện áp nguồn |
| 4 | Ua2 + | B + | Tín hiệu vuông pha |
| 5 | Ua0 + | R + | Tín hiệu tham chiếu |
| 6 | Ua1 - | A - | Tín hiệu vuông pha |
| 7 | 0V | 0V | Đất |
| 8 | Ua2 - | B - | Tín hiệu vuông pha |
| 9 | ERR NOT | ERR NOT | Tín hiệu lỗi (Low = Lỗi) |
| 10 | Ua0 - | R - | Tín hiệu tham chiếu |
5.2.2 Cáp cảm biến mềm
Lưu ý: Thông tin này chỉ liên quan đến khách hàng xử lý trực tiếp các tín hiệu thô và do đó không sử dụng mô-đun giao diện có sẵn.
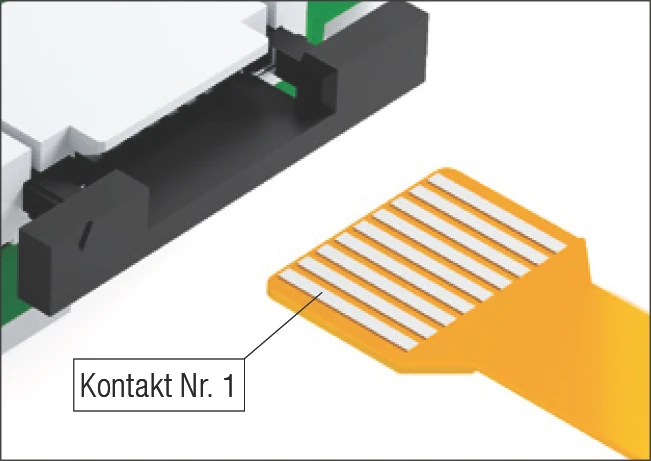
Kết nối chân của cáp cảm biến mềm
| Chân | Tín hiệu | Mô tả |
|---|---|---|
| 1 | PZ | Tín hiệu thô tham chiếu |
| 2 | GND | Đất |
| 3 | NZ | Tín hiệu thô tham chiếu |
| 4 | +5V DC | Điện áp nguồn |
| 5 | Diode | Cấp nguồn đèn chiếu sáng |
| 6 | PSIN | Tín hiệu thô sine |
| 7 | NSIN | Tín hiệu thô sine |
| 8 | PCOS | Tín hiệu thô cosine |
| 9 | NCOS | Tín hiệu thô cosine |
5.3 Bộ điều khiển
MINISLIDE MSQscale tương thích với mọi bộ điều khiển có cổng encoder tăng dần cho tín hiệu 1 Vpp (sine/cosine tương tự) hoặc cổng RS-422 (TTL số). MINISLIDE MSQscale có thể kết nối với các đầu vào encoder RS-422 hoặc RS-485.
Các mô-đun phù hợp có sẵn từ các nhà sản xuất bộ điều khiển hàng đầu, bao gồm Siemens, Beckhoff, ACS, v.v.
Đối với các ứng dụng đơn giản, có thể sử dụng bộ đếm USB (ví dụ từ Heilig & Schwab; xem mục 5.2 trong catalog sản phẩm) để kết nối MINISLIDE MSQscale trực tiếp với PC.
Tần số đầu vào tối đa phải được xem xét khi chọn bộ điều khiển. Tần số có thể lên đến 8 MHz, tùy thuộc vào tốc độ di chuyển và độ phân giải. Xem mục 6.4 để tham khảo một số ví dụ tính toán.
Bộ điều khiển với cổng encoder cho tín hiệu 1 Vpp hoặc tín hiệu vuông pha
5.3.1 Cài đặt
Tín hiệu tương tự
Tín hiệu tương tự phải được nội suy trong thiết bị do khách hàng cung cấp để đạt được độ phân giải phù hợp. Chu kỳ tín hiệu tương ứng với khoảng cách 100 μm.
Ví dụ: Chu kỳ tín hiệu 100 μm, hệ số nội suy 250 và đánh giá bốn cạnh cho độ phân giải 0,1 μm.
Tín hiệu số
Kích thước bước trong bộ điều khiển truyền động phải được cấu hình theo độ phân giải được chọn và loại đánh giá cạnh.
Độ phân giải tiêu chuẩn của MINISLIDE MSQscale là 0,1 μm. Độ phân giải 1 μm hoặc 10 μm có thể được đặt hàng tùy chọn.
Hầu hết các bộ điều khiển cho phép chọn loại đánh giá cạnh. Các lựa chọn là đánh giá bốn cạnh, hai cạnh và một cạnh (xem mục 6.3).
5.4 Kiểm tra chức năng
Đèn LED xanh sẽ sáng lên nếu MINISLIDE MSQscale được cấp nguồn đúng cách.
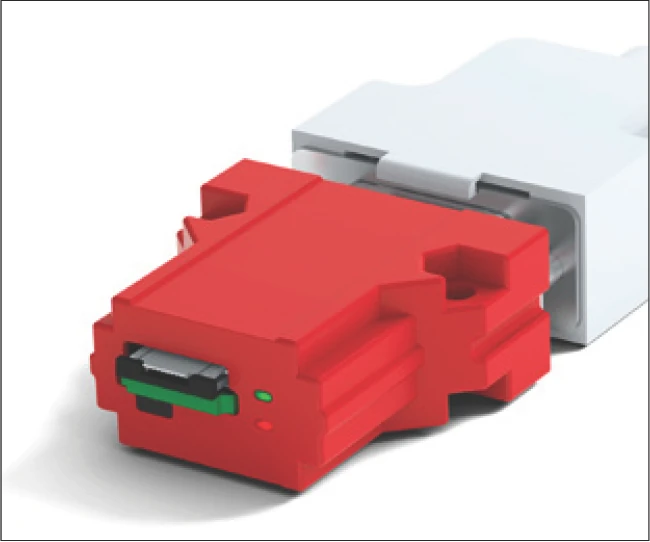
Mô-đun giao diện không có cáp cảm biến mềm MINISLIDE MSQscale. Cả đèn LED xanh và đỏ đều sáng.
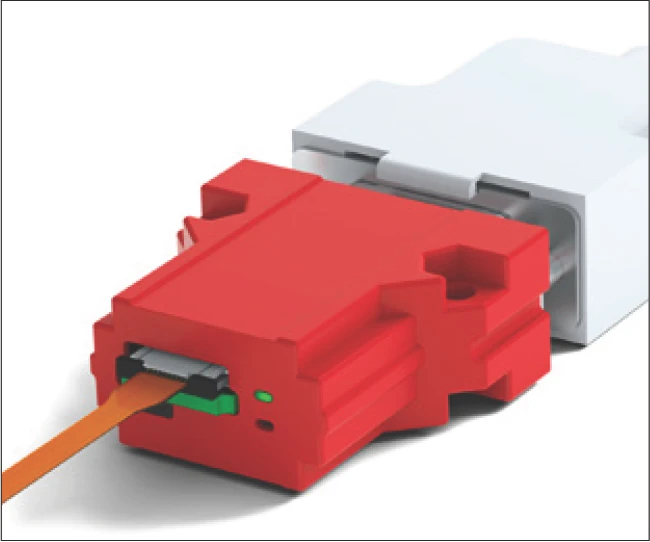
Mô-đun giao diện với cáp cảm biến mềm MINISLIDE MSQscale đã kết nối đúng. Đèn LED xanh sáng.
Nếu bàn trượt đang trên thanh dẫn hướng và đèn LED vẫn sáng đỏ mặc dù cáp cảm biến mềm đã được cắm, nên tìm lỗi bằng cách sử dụng bảng trong chương 9.2 "Mô tả lỗi".
| LED | Không có nguồn | Đã có nguồn, hoạt động bình thường | Trạng thái lỗi |
|---|---|---|---|
| Đỏ | Không sáng | Không sáng | Sáng đỏ |
| Xanh | Không sáng | Sáng xanh | Sáng xanh |
Trạng thái của mô-đun giao diện được hiển thị điện tử qua đầu ra ("ERR NOT"). ERR NOT là đầu ra 5 volt (mức TTL), trong đó "tín hiệu thấp" = "lỗi đang chờ xử lý" và "tín hiệu cao" = "không có lỗi".
Tín hiệu lỗi nên được kết nối với đầu vào trở kháng cao. Nếu trở kháng đầu vào quá thấp, dòng điện sẽ chạy qua đèn LED đỏ và làm nó phát sáng.
6 Nguyên lý Kỹ thuật
6.1 Độ chính xác hệ thống
6.1.1 Độ chính xác hệ thống
Độ chính xác hệ thống bao gồm sai lệch sóng dài (tuyến tính của thước đo kích thước) và sai lệch sóng ngắn (ví dụ: độ chính xác nội suy) của hệ thống quét (cảm biến và mô-đun giao diện). Các giá trị độ chính xác tham chiếu ở nhiệt độ phòng 20 °C (68 °F).
Sai lệch sóng dài
Độ tuyến tính của thước đo kích thước bao gồm toàn bộ chiều dài thanh. Trong phạm vi chiều dài này, sai lệch của thước đo kích thước luôn nhỏ hơn ±3 μm so với thước lý tưởng.
Sai lệch sóng ngắn
Tất cả các hệ thống đo khoảng cách tăng dần đều bị ảnh hưởng bởi hiệu ứng sai lệch tuần hoàn. Sai lệch tuần hoàn này, còn được gọi là sai lệch sóng ngắn, xảy ra do các sai lệch nhỏ trong hệ thống cảm biến hoặc xử lý tín hiệu điện. Điều này có nghĩa là các tín hiệu sine và cosine lệch khỏi dạng chính xác về mặt toán học. Nếu sai lệch tuần hoàn chỉ xảy ra trong quá trình số hóa và tính toán vị trí, chúng ta gọi đó là lỗi nội suy.
Sai lệch sóng ngắn của MINISLIDE MSQscale luôn nằm trong phạm vi ±0,6 μm.
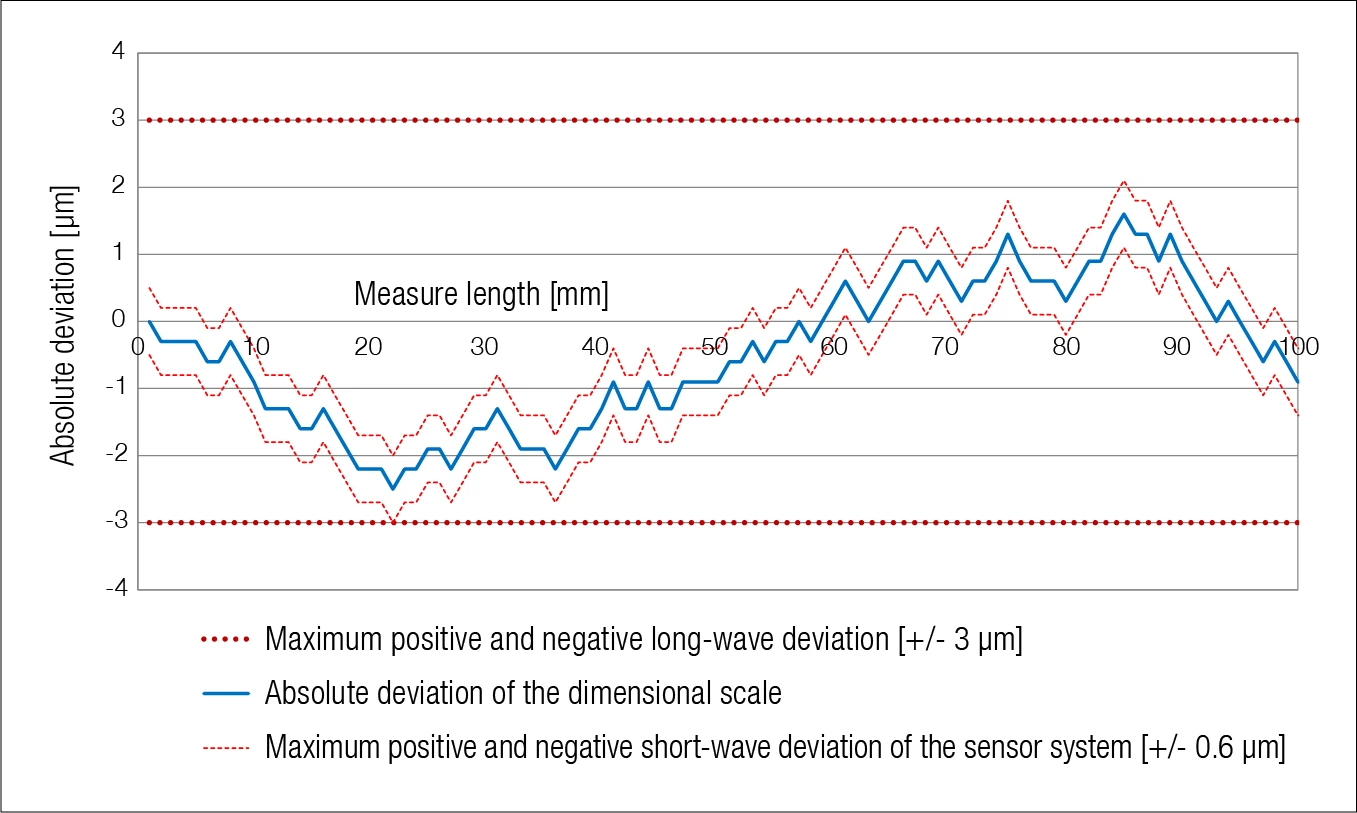
Độ chính xác hệ thống được xác định bởi sai lệch sóng dài và sai lệch sóng ngắn
Độ tuyến tính của thước đo kích thước được ghi lại cho từng hệ thống và có thể cung cấp cho khách hàng theo yêu cầu. Bản ghi luôn tham chiếu đến một thanh dẫn hướng cụ thể (xem số thanh).
6.2 Nội suy
Đối với các ứng dụng đo khoảng cách, nội suy có nghĩa là chuyển đổi tín hiệu của các tín hiệu đầu vào tương tự thành các tín hiệu đầu ra số với chu kỳ tín hiệu nhỏ hơn. Điều này cần thiết vì các số đọc đếm và/hoặc số đọc vị trí không thể tạo trực tiếp từ tín hiệu tương tự.
Hệ số nội suy xác định tỷ lệ chu kỳ tín hiệu từ tín hiệu đầu vào tương tự đến tín hiệu đầu ra số.
Đầu ra của quá trình nội suy là tín hiệu vuông pha, tức là hai dạng sóng xung có độ lệch pha 90°. Độ phân giải được xác định bởi khoảng cách giữa hai cạnh của tín hiệu vuông pha.
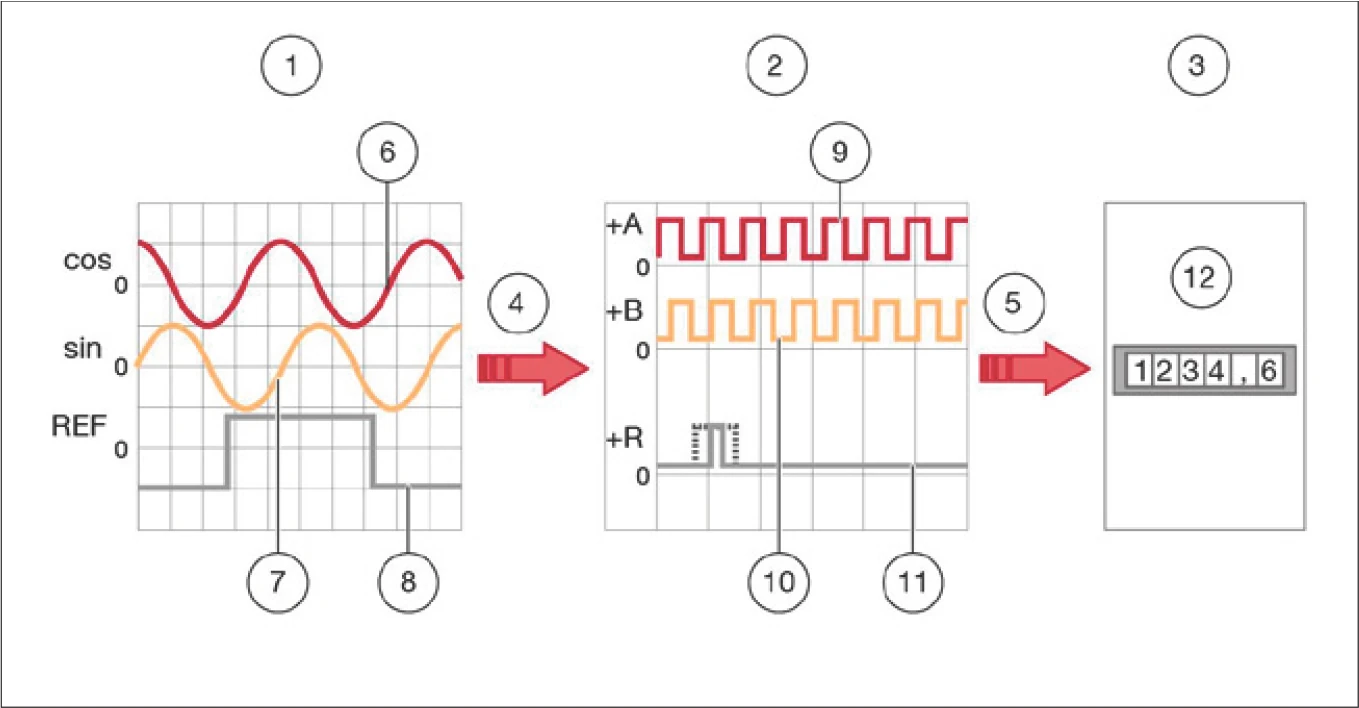
Các tín hiệu đầu vào tương tự (sin, cos, REF) được nội suy (mũi tên đỏ) thành tín hiệu đầu ra số (+A, +B, +R). Các tín hiệu đảo không được biểu thị:
1. Tín hiệu đầu vào tương tự: sin, cos, REF
2. Tín hiệu đầu ra số: +A, +B, +Z
3. Thiết bị điện tử phía sau
4. Nội suy
5. Xử lý tín hiệu
6. Tín hiệu đầu vào tương tự (cos)
7. Tín hiệu đầu vào tương tự (sin)
8. Tín hiệu đầu vào tương tự (REF)
9. Tín hiệu đầu ra số (+A)
10. Tín hiệu đầu ra số (+B)
11. Tín hiệu đầu ra số (+Z)
12. Bộ đếm đo lường, PC, bộ điều khiển máy, v.v.
6.3 Đánh giá Tín hiệu Số
Các tín hiệu số, bao gồm hai tín hiệu tăng dần A và B và tín hiệu tham chiếu R, được truyền đến thiết bị điện tử phía sau. Đây có thể là một đơn vị hiển thị đơn giản, PC hoặc bộ điều khiển máy.
Thiết bị điện tử phía sau xác định giá trị vị trí từ các tín hiệu số bằng cách đếm các cạnh tín hiệu. Hướng đếm được xác định từ mối quan hệ pha của tín hiệu A và B. Tùy thuộc vào số cạnh được đánh giá, chúng ta nói về:
1. Đánh giá một cạnh
Chỉ một cạnh được đếm cho mỗi kênh. Do đó, một bước đo sẽ tương ứng với một chu kỳ tín hiệu số.
2. Đánh giá hai cạnh
Cả cạnh lên và cạnh xuống của một kênh đều được đếm. Do đó, một bước đo sẽ tương ứng với một nửa chu kỳ tín hiệu số.
3. Đánh giá bốn cạnh
Cả cạnh lên và cạnh xuống của cả hai kênh đều được đếm. Do đó, một bước đo sẽ tương ứng với một phần tư chu kỳ tín hiệu số.
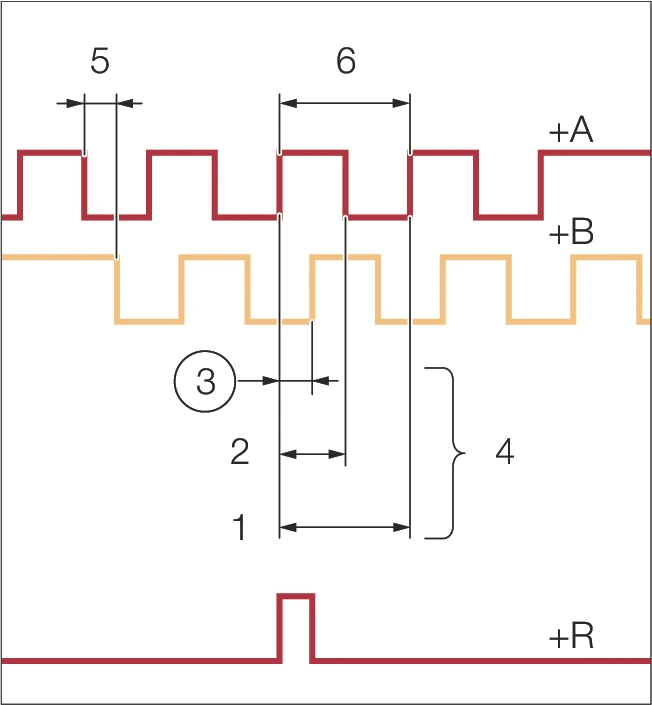
1. Đánh giá một cạnh 2. Đánh giá hai cạnh 3. Đánh giá bốn cạnh
4. Trong mỗi trường hợp một bước đo 5. Độ phân giải 6. Chu kỳ tín hiệu số
6.3.1 Độ phân giải
Độ phân giải là sự thay đổi vị trí nhỏ nhất có thể đo được của hệ thống đo. Điều này tương ứng với khoảng cách giữa hai cạnh của tín hiệu vuông pha. Độ phân giải được xác định bởi chu kỳ của tín hiệu tương tự, hệ số nội suy và phương pháp đánh giá.
Ví dụ tính toán độ phân giải (A)
| I Hệ số nội suy (mặc định) | 250 |
| P Chu kỳ tín hiệu đầu vào | 100 μm |
| E Đánh giá (4 cạnh) | hệ số = 4 |
A = PI × E = 100 μm250 × 4 = 0.1 μm
6.4 Tần số Tín hiệu
Tần số tín hiệu tại đầu ra mô-đun giao diện phụ thuộc vào tốc độ di chuyển và độ phân giải (mô-đun số) hoặc bước tăng của thước đo kích thước (mô-đun tương tự). Để đảm bảo không bỏ sót bước nào, tần số đầu vào tối đa của bộ điều khiển phải lớn hơn tần số đầu ra tối đa được tính toán của mô-đun giao diện.
f = vP
f = Tần số (Hz) v = Tốc độ (m/s) P = Bước tăng (m)
6.4.1 Ví dụ tính toán cho MINISLIDE MSQscale tương tự
| v Tốc độ di chuyển | 2 m/s |
| P Chu kỳ tín hiệu (tương ứng với bước tăng của thước đo kích thước) | 100 μm |
f = vP = 2 m/s100 × 10-6 m = 20,000 Hz = 20 kHz
6.4.2 Ví dụ tính toán cho MINISLIDE MSQscale số
Tần số đầu ra tối đa của mô-đun giao diện số là 8 MHz mỗi kênh. Điều này có nghĩa là tín hiệu A và tín hiệu B mỗi tín hiệu có thể có tần số tối đa là 8 MHz. Với đánh giá bốn cạnh của các tín hiệu A/B, tốc độ đếm là 32 MHz, tương ứng với tốc độ tối đa 3,2 m/s với độ phân giải 0,1 μm.
Hiệu suất tối đa của MINISLIDE MSQscale số
| v Tốc độ tối đa | 3.2 m/s |
| A Độ phân giải | 0.1 μm |
| P Chu kỳ tín hiệu số (4 × Độ phân giải) | 0.4 μm |
Tính toán tần số đầu ra tối đa của mô-đun giao diện, tương ứng với phạm vi tần số đầu vào tối thiểu cần thiết của bộ điều khiển:
f = vP = 3.2 m/s0.4 × 10-6 m = 8,000,000 Hz = 8 MHz
Tính toán tần số đếm tối thiểu cần thiết của bộ điều khiển (với đánh giá 4 cạnh):
fcount = vA = 3.2 m/s0.1 × 10-6 m = 32,000,000 Hz = 32 MHz
Ví dụ tốc độ v
Theo chiều ngược lại, tốc độ hoặc độ phân giải có thể được tính toán từ một tần số đã cho (ví dụ: bị giới hạn bởi bộ điều khiển được chọn).
| f Tần số đầu vào tối đa của bộ điều khiển | 1 MHz |
| A Độ phân giải | 0.1 μm |
| P Chu kỳ tín hiệu số (4 × Độ phân giải) | 0.4 μm |
Vmax = f × P = 1 MHz × 0.4 μm = 0.4 m/s