7 Thuật ngữ và Định nghĩa
7.1 Mô-đun giao diện
Trong mô-đun giao diện, dữ liệu cảm biến được chuyển đổi thành tín hiệu tương tự tiêu chuẩn (1 Vpp) hoặc tín hiệu số tiêu chuẩn (TTL).
- Các tín hiệu được khuếch đại
- Lỗi pha giữa tín hiệu sine và cosine được hiệu chỉnh
- Độ lệch offset được bù trừ
Mô-đun giao diện số cũng bao gồm một bộ nội suy chuyển đổi tín hiệu tương tự thành tín hiệu số. Để biết thêm thông tin, xem phần 6.2 "Nội suy".
7.1.1 So sánh mô-đun giao diện tương tự và số
| Số (Digital) | Tương tự (Analog) | |
|---|---|---|
| Ký hiệu | D | A |
| Ưu điểm |
|
|
| Nhược điểm | Tần số rất cao ở tốc độ cao và độ phân giải cao | Không thể căn chỉnh lại tại cơ sở khách hàng, nghĩa là toàn bộ hệ thống (thanh dẫn hướng và mô-đun giao diện) phải được thay thế trong trường hợp có lỗi |






7.2 Cấp chính xác
Cấp chính xác xác định sai lệch đo lường tối đa dự kiến của hệ thống trong các điều kiện hoạt động quy định. Hệ thống đo khoảng cách với cấp chính xác 3 μm cho phép sai lệch ± 3 μm.
7.3 Độ lặp lại
Độ lặp lại một chiều của hệ thống đo lường thường được hiểu là khả năng lặp lại kết quả mà một hệ thống cụ thể trả về trong điều kiện môi trường hoàn toàn giống nhau. Khi đánh giá, sai lệch đo lường phải được biết và đưa vào phân tích.
Độ lặp lại của vị trí trục có thể được xác định cho một tốc độ di chuyển cụ thể bằng các phương pháp đơn giản, bằng cách tính giá trị trung bình cộng và độ lệch chuẩn của nhiều lần đo.
7.4 Tham chiếu vị trí
Hệ thống đo gia số không thể xác định vị trí chính xác sau khi bật nguồn. Vì lý do này, một rãnh khác được thêm vào bên cạnh rãnh gia số — rãnh tham chiếu. Một hoặc nhiều điểm tham chiếu có thể được đánh dấu trên rãnh tham chiếu.
Cần chạy tham chiếu của bàn trượt để thiết lập tham chiếu hệ thống. Trục thường di chuyển theo một chiều cho đến khi gặp điểm dừng cơ học. Từ đó, trục di chuyển ngược lại cho đến khi phủ qua dấu tham chiếu. Thông thường, dấu tham chiếu cách đều nhau luôn được tiếp cận từ cùng một chiều (một chiều).
Sau đó bộ điều khiển có thể sử dụng tín hiệu tham chiếu để điều chỉnh bộ đếm nội bộ về một giá trị xác định. Đối với mô-đun giao diện tương tự, bộ điều khiển nhận ra một vị trí được xác định trước cho các tín hiệu gia số (thông thường là SIN = COS và cả hai đều lớn hơn không), cùng với REF = "cao" làm vị trí tham chiếu.
7.5 Sai lệch tuần hoàn
Tất cả các hệ thống đo khoảng cách gia số đều bị ảnh hưởng bởi hiệu ứng sai lệch tuần hoàn, có bước sóng chính xác tương ứng với khoảng cách vạch chia hoặc một phần của nó. Sai lệch tuần hoàn này, còn được gọi là sai lệch sóng ngắn (SWD), xảy ra do các sai lệch nhỏ trong hệ thống cảm biến hoặc xử lý tín hiệu điện. Điều này có nghĩa là các tín hiệu sine và cosine lệch khỏi dạng toán học chính xác. Sai lệch có thể được phân loại tùy thuộc vào cách sắp xếp (sóng hài).
| Chu kỳ SWD | Nguyên nhân sai lệch |
|---|---|
| 1 chu kỳ tín hiệu | Độ lệch offset sine/cosine |
| 1/2 chu kỳ tín hiệu | Biên độ sine và cosine khác nhau |
| 1/3 – 1/8 chu kỳ tín hiệu | Cảm biến tạo ra tín hiệu khác biệt cơ bản so với dạng sóng sine |
7.5.1 Lỗi nội suy
Nếu sai lệch tuần hoàn chỉ xảy ra trong quá trình số hóa và tính toán vị trí, thì đó được gọi là lỗi nội suy.
7.6 Lỗi bộ so sánh
Lỗi bộ so sánh, còn được gọi là lỗi Abbe, là sai lệch hệ thống xảy ra khi trục của tiêu chuẩn độ dài không trùng với trục của tiêu chuẩn khoảng cách. Nguyên nhân của sai lệch là chuyển động quay nhỏ trong thiết kế trục, ảnh hưởng đến kết quả đo lường.
7.7 Tần suất lấy mẫu
Tần suất lấy mẫu mô tả tần suất mà tín hiệu tương tự được lấy mẫu trong mỗi khoảng thời gian. Thông thường khoảng thời gian là một giây, do đó đơn vị cho tần suất lấy mẫu là Hz. Để đảm bảo tái tạo hoàn chỉnh tín hiệu gốc, tần suất lấy mẫu phải ít nhất gấp đôi tần số tín hiệu gốc theo định lý lấy mẫu Nyquist–Shannon.
7.8 Truyền tín hiệu đơn đầu
Đối với truyền tín hiệu đơn đầu, điện áp thay đổi so với điện thế tham chiếu (mass điện). Đây là cách truyền dữ liệu đơn giản và tiện lợi, chỉ cần một dây cho mỗi tín hiệu.
Nhược điểm là độ nhạy nhiễu tương đối cao. Do đó loại truyền tín hiệu này chỉ nên được sử dụng cho khoảng cách ngắn và tốc độ thấp.
7.9 Truyền tín hiệu vi sai
Đối với truyền tín hiệu vi sai, các tín hiệu được mô tả bằng hiệu điện áp mà không cần tham chiếu đến mass điện. Thay vì một dây tín hiệu đơn, một cặp dây được sử dụng. Một dây mang tín hiệu, và dây kia mang tín hiệu đảo của nó. Bộ điều khiển sau đó tổng hợp hiệu giữa hai tín hiệu thành tín hiệu vi sai (ví dụ tín hiệu A+ và A- trở thành A).
Truyền tín hiệu vi sai là giải pháp tốt hơn cho hầu hết các ứng dụng vì nó chịu đựng nhiễu tốt hơn. Nhiễu ghép vào tín hiệu gần như giống nhau đối với cả hai dây, do đó nhiễu gần như bị loại bỏ khi tạo hiệu.
Tiêu chuẩn RS422 (vi sai) được phát triển đặc biệt cho khoảng cách dài hơn và tốc độ truyền cao hơn.
7.10 Chiều di chuyển
Chiều di chuyển có thể được đọc từ mối quan hệ pha của các tín hiệu điện. Một tín hiệu dẫn trước hoặc trễ sau tín hiệu kia, tùy thuộc vào chiều.
Mô-đun giao diện số: Nếu bàn trượt di chuyển theo chiều của cáp cảm biến linh hoạt, tín hiệu trên kênh A vượt trước kênh B 90°. Từ đó bộ điều khiển nhận biết chiều di chuyển dương, tức là bộ đếm đếm lên. Ở chiều ngược lại, tín hiệu trên kênh A trễ sau kênh B 90°. Bộ đếm đếm xuống.
Mô-đun giao diện tương tự: Chiều đếm bị đảo ngược.
8 Mẹo ứng dụng
8.1 Điều kiện vận hành cho hệ thống đo lường MINISCALE PLUS
MINISCALE PLUS có hệ thống đo lường quang học hở. Như với mọi hệ thống đo lường quang học, các chất gây ô nhiễm như bụi bẩn làm giảm hiệu suất hoạt động của hệ thống. Do đó không khuyến nghị sử dụng MINISCALE PLUS trong các ứng dụng mà bụi, mảnh cắt, hạt hoặc chất lỏng được dự kiến xuất hiện trong quá trình vận hành. Vết xước lớn hoặc các loại hư hỏng khác trên thước đo kích thước cũng gây hại tương tự.
Nhìn chung, MINISCALE PLUS phù hợp nhất để sử dụng trong môi trường sạch. Thường dùng trong các tình huống có các thiết bị quang học khác hoặc có môi trường sạch.
Về khía cạnh này, MINISCALE PLUS khác với hệ thống đo khoảng cách AMS, được thiết kế đặc biệt cho môi trường khắc nghiệt hơn.
8.2 Đặc tính EMC của MINISCALE PLUS
MINISCALE PLUS và các phụ kiện của nó đã được kiểm tra theo tiêu chuẩn EN 61000. Kết quả kiểm tra xác nhận MINISCALE PLUS đáp ứng các yêu cầu của tiêu chuẩn. Tuy nhiên, điều này không loại trừ khả năng xảy ra nhiễu điện từ không mong muốn trong các trường hợp ứng dụng cụ thể. Luôn cần tuân thủ các thực hành thiết kế EMC liên quan.
8.3 Ảnh hưởng của từ trường lên MINISCALE PLUS
Từ trường tĩnh không có ảnh hưởng đến MINISCALE PLUS. Hiệu ứng cảm ứng có thể xảy ra với từ trường xoay chiều, tùy thuộc vào cách bố trí cáp.
9 Khắc phục sự cố
9.1 Căn chỉnh mô-đun giao diện số
Chỉ cần căn chỉnh khi giao mô-đun giao diện số sau! Không thể căn chỉnh mô-đun giao diện tương tự bởi khách hàng.
Quy trình:
- Bật MINISCALE PLUS
- Nhấn và giữ nút căn chỉnh A
- Di chuyển thanh dẫn hướng chậm rãi dọc theo toàn bộ hành trình (4 đến 5 lần)
- Nhả nút căn chỉnh
- Đặt lại MINISCALE PLUS (= tắt và bật lại)
- Chạy thanh dẫn hướng dọc theo toàn bộ hành trình và đảm bảo chỉ đèn LED xanh sáng
- Nếu đèn LED đỏ sáng, phải lặp lại quy trình căn chỉnh
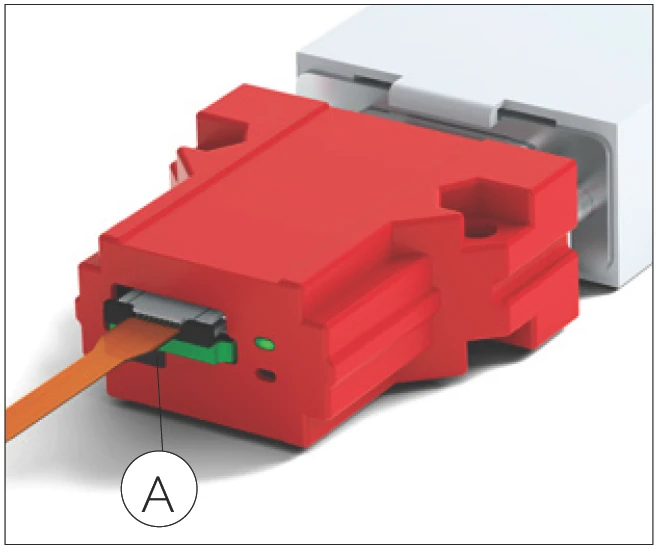
Mô-đun giao diện có vỏ bảo vệ
A Nút căn chỉnh
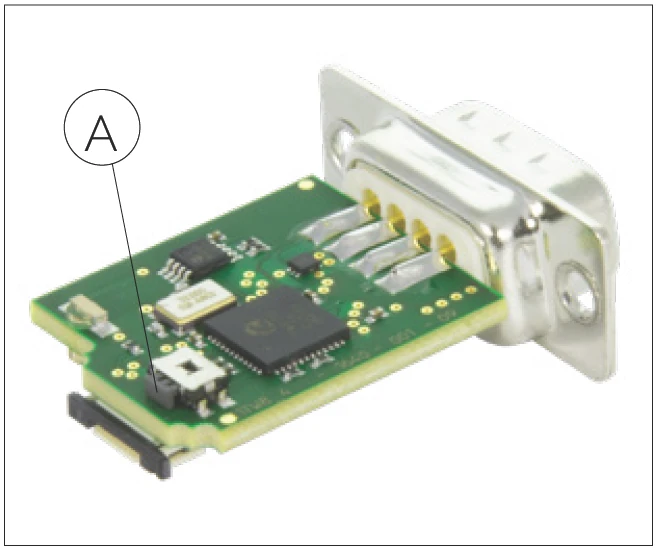
Mô-đun giao diện không có vỏ bảo vệ
A Nút căn chỉnh
9.2 Mô tả lỗi
| Lỗi | Nguyên nhân có thể | Giải pháp |
|---|---|---|
| Đèn LED xanh trên mô-đun giao diện không sáng | Không có điện áp nguồn hoặc điện áp nguồn không đúng tại mô-đun giao diện | Kiểm tra điện áp nguồn (+5V DC) |
| Phân bổ chân kết nối của cáp do khách hàng cung cấp không đúng | Kiểm tra phân bổ chân kết nối | |
| Đầu nối D-Sub 9 hoặc Micro Match không được kết nối đúng cách | Kiểm tra kết nối | |
| MINISCALE PLUS bị hư hỏng do xử lý không đúng cách (không tuân thủ yêu cầu ESD) | Thay thế MINISCALE PLUS | |
| Đèn LED đỏ trên mô-đun giao diện sáng | Điện áp nguồn không đúng trên mô-đun giao diện | Kiểm tra điện áp nguồn (+5V DC) |
| Cáp cảm biến linh hoạt chưa kết nối với mô-đun giao diện | Kết nối cáp cảm biến linh hoạt | |
| Cáp cảm biến linh hoạt không kết nối đúng cách với mô-đun giao diện. Mặt tiếp xúc bị lật 180° | Lật cáp cảm biến linh hoạt 180° | |
| Cáp cảm biến linh hoạt chưa được cắm hoàn toàn vào đầu nối ZIF | Kiểm tra kết nối | |
| Cáp cảm biến linh hoạt bị hư hỏng hoặc bị gập (ví dụ vết nứt tóc trên các điểm tiếp xúc) | Thay thế MINISCALE PLUS | |
| MINISCALE PLUS bị hư hỏng do xử lý không đúng cách (không tuân thủ yêu cầu ESD) | Thay thế MINISCALE PLUS | |
| Tín hiệu đầu vào cảm biến ngoài phạm vi bình thường, ví dụ do thước đo kích thước bị bẩn | Làm sạch thước đo kích thước như mô tả trong phần 3.3 Có thể căn chỉnh lại với hệ thống số (xem phần 9.1) | |
| Đèn LED đỏ phát sáng yếu | Đầu ra "ERR NOT" kết nối với đầu vào trở kháng thấp, cho phép một lượng nhỏ dòng điện chạy qua LED | Kết nối đầu ra "ERR NOT" với đầu vào có trở kháng cao, hoặc bỏ qua đèn LED phát sáng yếu |
| Thông tin vị trí không khớp với khoảng cách di chuyển | Vượt quá tần số đầu vào tối đa của bộ điều khiển khách hàng | Giảm tốc độ di chuyển hoặc độ phân giải |
| Độ phân giải cài đặt không đúng trong bộ điều khiển của khách hàng | Điều chỉnh cài đặt trong bộ điều khiển của khách hàng | |
| Hệ số đánh giá cạnh quá thấp | Cài đặt đánh giá cạnh X4 trong bộ điều khiển của khách hàng | |
| Nhiễu điện từ | Thực hiện các biện pháp bảo vệ EMC: Sử dụng cáp dây xoắn có chắn, đi dây cáp nguồn và cáp điều khiển riêng biệt, v.v. | |
| Cáp cảm biến linh hoạt bị hư hỏng hoặc bị gập (ví dụ vết nứt tóc trên các điểm tiếp xúc) | Thay thế MINISCALE PLUS | |
| Thước đo kích thước rất bẩn | Làm sạch thước đo kích thước như mô tả trong phần 3.3; thay thế hệ thống nếu cần thiết | |
| Lỗi mô-đun giao diện số | Vượt quá tốc độ tối đa 3,2 m/s (ở độ phân giải 0,1 μm) | Giới hạn tốc độ ở 3,2 m/s hoặc giảm độ phân giải |
| Số trên mô-đun giao diện không khớp với số bàn trượt MINISCALE PLUS | Kiểm tra sự phù hợp giữa mô-đun giao diện và thanh dẫn hướng | |
| Thực hiện căn chỉnh như mô tả trong phần 9.1 Gửi trả hệ thống về SCHNEEBERGER | ||
| Lỗi mô-đun giao diện tương tự | Số trên mô-đun giao diện không khớp với số bàn trượt MINISCALE PLUS | Kiểm tra sự phù hợp giữa mô-đun giao diện và thanh dẫn hướng |
| Gửi trả hệ thống về SCHNEEBERGER để căn chỉnh | ||
| Không phát hiện được dấu tham chiếu | Chưa đi qua dấu tham chiếu | Điều chỉnh khoảng cách hành trình |
| Thanh dẫn hướng bị bẩn | Làm sạch thước đo kích thước như mô tả trong phần 3.3 | |
| Gửi trả hệ thống về SCHNEEBERGER | ||
| Hiển thị vị trí không đúng với bộ đếm USB Heilig & Schwab | Tương tự: Bộ nội suy có hệ số nội suy cố định là 256, dẫn đến độ phân giải 0,39 μm | Tính toán với độ phân giải tương ứng |
| Tần số đầu vào tối đa của đầu vào số là 500 kHz, vì vậy với độ phân giải 0,1 μm, tốc độ bị giới hạn ở 0,2 m/s (bộ đếm 026) hoặc 0,4 m/s (bộ đếm 046) | Giảm tốc độ hoặc độ phân giải | |
| Lỗi khác | Cần điều tra thêm | Liên hệ SCHNEEBERGER |