3.1.1 การจำแนกประเภทระบบวัดระยะ
ประเภทต่าง ๆ ของหลักการวัดระยะ
การวัดระยะเชิงเส้นในงานอุตสาหกรรมใช้ระบบวัดระยะที่มีความแม่นยำสูงหลากหลายประเภท ระบบเหล่านี้สามารถแบ่งประเภทได้ตามหลักการวัดทางฟิสิกส์ที่ใช้
ระบบแมกนีโตรีซิสทีฟ
ใช้เซนเซอร์ MR หรือเซนเซอร์ Hall Effect บันทึกการเปลี่ยนแปลงเป็นคาบของสเกลแม่เหล็ก แตกต่างจากระบบออปติก ระบบแม่เหล็กไม่ได้รับผลกระทบจากสิ่งสกปรก ระยะพิทช์ทั่วไปอยู่ระหว่าง 0.4 ถึง 10 mm
ระบบออปติก
ใช้เซนเซอร์สแกนระยะพิทช์ บันทึกการเปลี่ยนแปลงเป็นคาบของความสว่างแสงสะท้อน/ส่งผ่าน หรือเฟส สามารถบรรลุระยะพิทช์ที่ละเอียดมากด้วยคาบสัญญาณน้อยกว่า 10 µm ให้ความละเอียดสูงสุด
ระบบเหนี่ยวนำ
ใช้สเกลโลหะที่มีโครงสร้างเชิงกลด้วยการออกแบบที่แข็งแกร่งมาก แถบเหล่านี้ทำงานเหมือนแกนหม้อแปลง ยากที่จะบรรลุระยะพิทช์ต่ำกว่า 1 mm
การวัดโดยตรง กับ การวัดแบบอ้อม
วิธีที่ชิ้นส่วนขับเคลื่อนและชิ้นส่วนระบบวัดระยะทำงานร่วมกันมีความสำคัญมาก เราแยกแยะระหว่างการวัดแบบอ้อมและการวัดโดยตรงตามหลักการทำงาน
การวัดแบบอ้อม
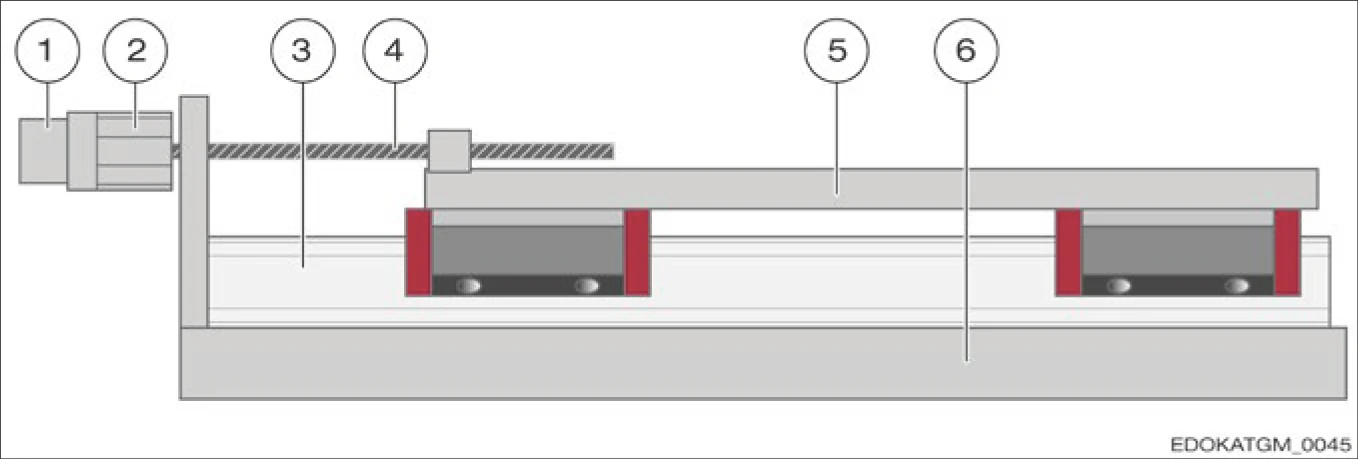
รางนำเชิงเส้นที่ไม่มีระบบวัดตำแหน่งแบบรวม
ส่วนประกอบ:
- การเคลื่อนที่เชิงเส้นถูกแปลงเป็นค่าวัดอื่น
- ตัวอย่าง: สกรูบอลพร้อมโรตารีเอ็นโค้ดเดอร์
- ข้อดี: ต้นทุนต่ำและโครงสร้างกะทัดรัด
- ข้อเสีย: กระบวนการแปลงทำให้เกิดข้อผิดพลาด
การวัดโดยตรง (MONORAIL AMS)
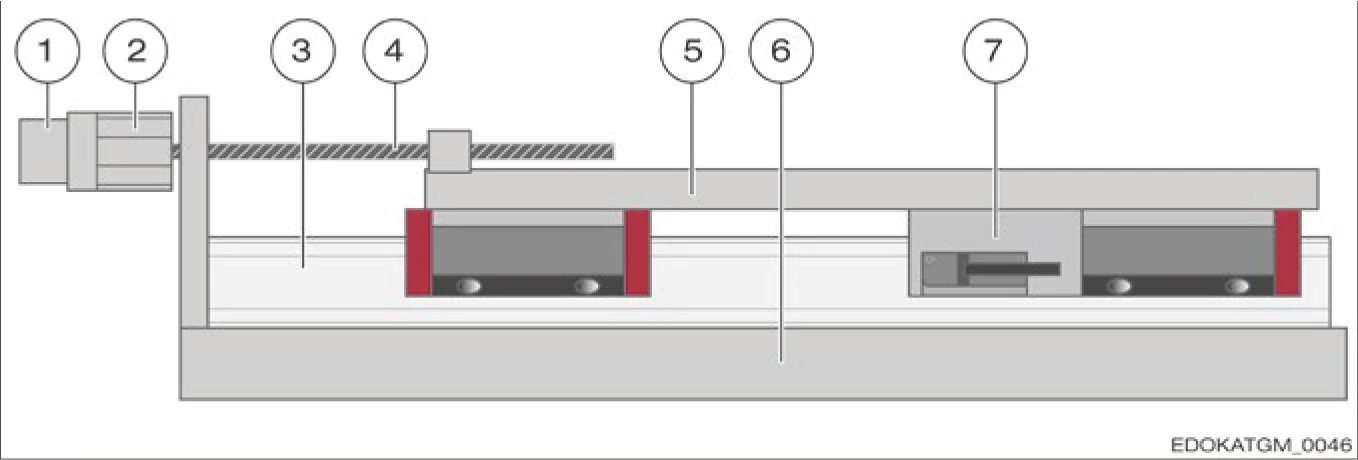
รางนำเชิงเส้นพร้อมระบบวัดตำแหน่งแบบรวม (MONORAIL AMS)
ส่วนประกอบ:
- ระบบวัดระยะรวมอยู่ในรางนำเชิงเส้น
- การอ่านค่าแม่นยำกว่า
- ได้รับผลกระทบจากสภาพแวดล้อมน้อยกว่า
- แนะนำสำหรับงานที่ต้องการความแม่นยำสูง
3.1.2 ภาพรวมหลักการวัดระยะ
| หลักการวัดระยะ | ออปติก | แมกนีโตรีซิสทีฟ | เหนี่ยวนำ |
|---|---|---|---|
| ความละเอียด | ● ● ● | ● ● ● | ● |
| ความง่ายในการรวมระบบ | ● | ● ● ● | ● ● ● |
| ความทนต่อสิ่งสกปรก | ● | ● ● | ● ● ● |
| พื้นที่การติดตั้ง | ● | ● ● ● | ● ● ● |
| การติดตั้ง | ● ● | ● ● ● | ● ● ● |
● = พอใช้ได้, ● ● ● = ดีมาก
3.1.3 เทคโนโลยีการวัดแบบแมกนีโตรีซิสทีฟ
ปรากฏการณ์แมกนีโตรีซิสทีฟ
ปรากฏการณ์แมกนีโตรีซิสทีฟทั้งหมดอาศัยความจริงที่ว่าชั้นบางของวัสดุเฟอร์โรแมกเนติก เปลี่ยนแปลงความต้านทานโอห์มิกเนื่องจากสนามแม่เหล็กภายนอก เซนเซอร์ในระบบวัดระยะของ SCHNEEBERGER ใช้ปรากฏการณ์ความต้านทานแม่เหล็กแบบแอนไอโซทรอปิก (AMR)
ปรากฏการณ์ที่รู้จักสามประเภท
- AMR (Anisotropic Magnetoresistance) - ใช้โดย SCHNEEBERGER
- GMR (Giant Magnetoresistance)
- TMR (Tunnel Magnetoresistance)
เซนเซอร์ในระบบวัดระยะของ SCHNEEBERGER ใช้ปรากฏการณ์ความต้านทานแม่เหล็กแบบแอนไอโซทรอปิก (AMR) ซึ่งถูกค้นพบโดย Thomson ในปี 1857 ในวัสดุเฟอร์โรแมกเนติก เมื่อทิศทางกระแสในตัวนำขนานกับทิศทางการแมกนีไทซ์ ความต้านทานจะเพิ่มขึ้นไม่กี่เปอร์เซ็นต์เมื่อเทียบกับกรณีที่ทิศทางกระแสตั้งฉากกับทิศทางการแมกนีไทซ์
การใช้ชั้นบางของวัสดุเฟอร์โรแมกเนติก สามารถผลิตเซนเซอร์สนามแม่เหล็กได้ โดยการกำหนดทิศทางสนามแม่เหล็กภายในผ่านสนามแม่เหล็กภายนอก หลังจากสนามแม่เหล็กภายนอกถูกนำออก สนามแม่เหล็กภายในยังคงถูกกำหนดทิศทาง นี่คือคุณสมบัติพื้นฐานของวัสดุเฟอร์โรแมกเนติก
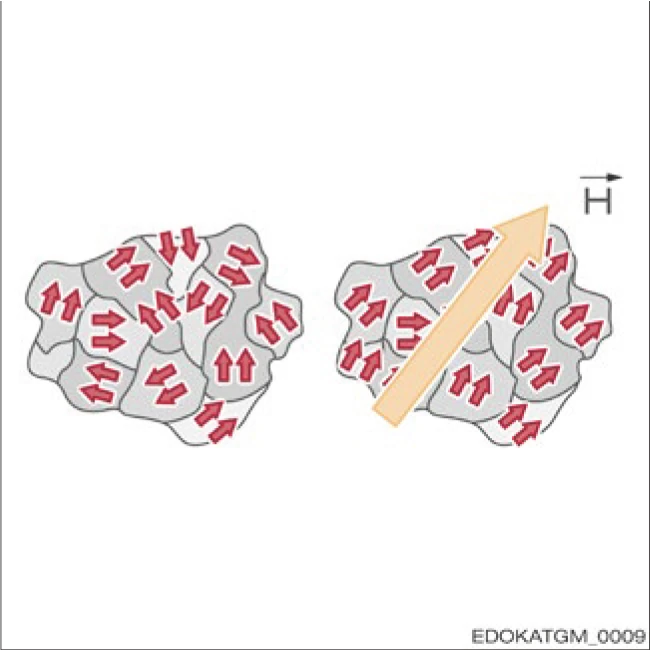
การกำหนดทิศทางโดเมน Weiss
การกำหนดทิศทางโดเมน Weiss
บริเวณแม่เหล็ก (โดเมน Weiss) ถูกกำหนดทิศทางตามสนามแม่เหล็กภายนอก
ปรากฏการณ์ทางฟิสิกส์:
- สนามแม่เหล็กภายนอก H⃗r กระทำต่อวัสดุ
- โดเมนแม่เหล็กจัดเรียงตัวเองโดยอัตโนมัติ
- ทิศทางการแมกนีไทซ์ส่งผลต่อค่าความต้านทาน
- เป็นพื้นฐานทางฟิสิกส์ของปรากฏการณ์แมกนีโตรีซิสทีฟ
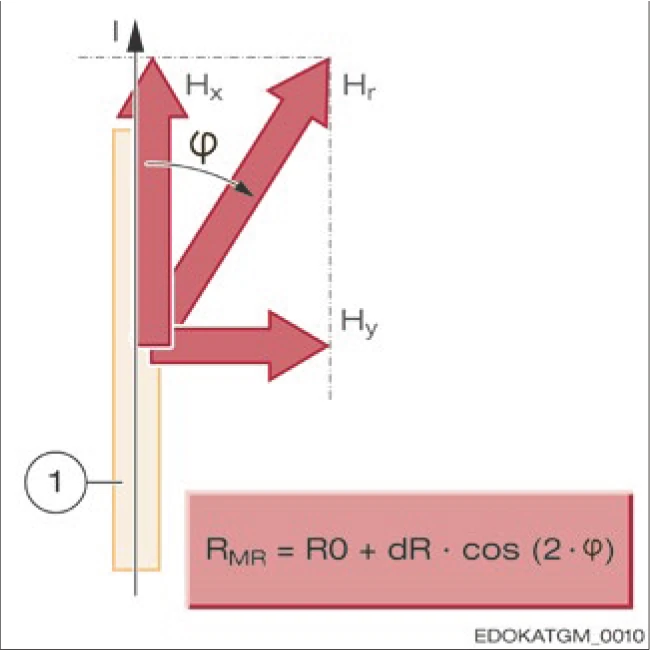
หลักการเซนเซอร์แมกนีโตรีซิสทีฟพร้อมแถบ MR
หลักการเปลี่ยนแปลงความต้านทานของแถบ MR
สูตรความต้านทาน: RMR = R0 + dR · cos(2·φ)
คุณสมบัติของแถบ MR
เซนเซอร์แบบ Incremental แมกนีโตรีซิสทีฟ
เนื่องจากความต้านทานของแถบ MR แผ่นเดียวได้รับผลกระทบจากการเปลี่ยนแปลงอุณหภูมิและสนามแม่เหล็กรบกวน โดยทั่วไปจึงใช้แถบสี่แผ่นเป็นเซนเซอร์โดยกำหนดค่าเป็นวงจร Wheatstone bridge ลักษณะเด่นคือการเปลี่ยนแปลงที่เหมือนกันในความต้านทานทั้งสี่ (เช่น เนื่องจากอุณหภูมิที่เพิ่มขึ้น) จะไม่สร้างความต่างแรงดันที่เอาต์พุต เพื่อให้ได้ผลที่วัดได้ ความต้านทานต้องเบี่ยงเบนอย่างเหมาะสม เช่น ความต้านทาน 1 เพิ่ม、2 ลด、3 เพิ่ม、4 ลด สิ่งนี้สามารถทำได้โดยการวางตำแหน่งแถบ MR อย่างเหมาะสมในการแมกนีไทซ์เป็นคาบ
จากนั้นเซนเซอร์แต่ละตัวจะถูกปรับให้เข้ากับคาบสเกลแม่เหล็กของมัน และสามารถใช้ได้กับคาบนั้นเท่านั้น นอกจากนี้ แถบ MR ไม่ได้ออกแบบแยกกัน แต่เป็นการต่อแบบอนุกรมของแถบหลายแผ่น โดยแต่ละแผ่นห่างกันหนึ่งคาบแม่เหล็ก เรียกว่าตำแหน่งที่เทียบเท่า วิธีนี้ช่วยให้ค่าเฉลี่ยของความแปรปรวนในความเข้มแมกนีไทซ์และความยาวขั้วของสเกล
จากเส้นโค้งคุณสมบัติกำลังสองของเซนเซอร์ (ค่าความแรงสนามแม่เหล็กวัด) สามารถได้สัญญาณเริ่มต้นที่มีความยาวครึ่งหนึ่งของคาบสเกลแม่เหล็ก สเกลแม่เหล็กของเซนเซอร์ MONORAIL AMS คือ 400 µm ดังนั้นคาบสัญญาณไฟฟ้าคือ 200 µm
ในที่สุด โครงสร้างที่เหมือนกันสองชุดถูกเลื่อนออกไป 1/4 ของคาบสัญญาณ (50 µm) จึงได้สัญญาณไซน์และโคไซน์ ซึ่งสามารถวัดทิศทางการเคลื่อนที่และระยะทาง
โครงสร้างเซนเซอร์แบบแผนผังทั้งหมดแสดงด้านล่าง:
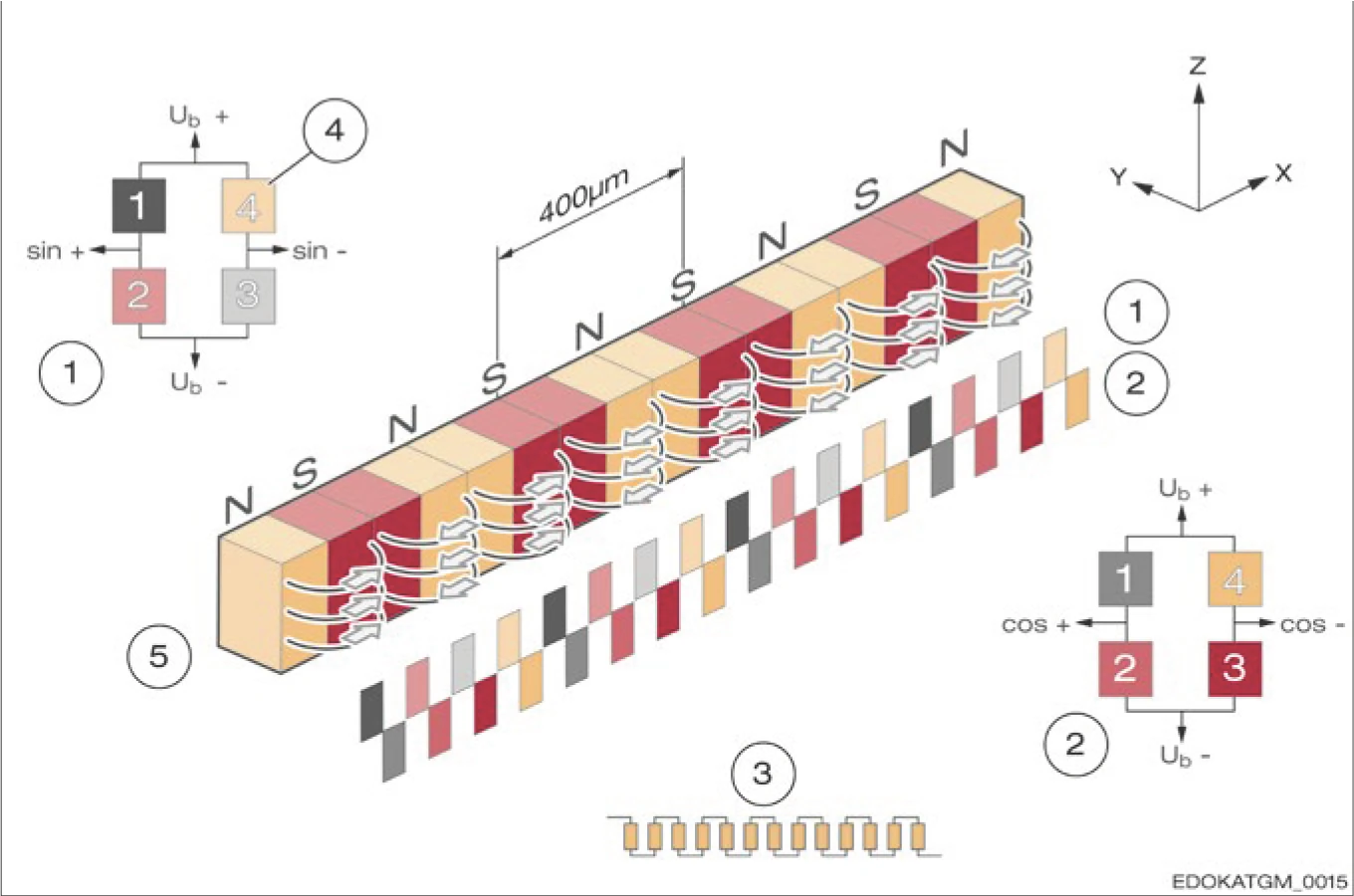
โครงสร้างแผนผังของเซนเซอร์ไซน์และโคไซน์
คำอธิบายส่วนประกอบ:
การกำหนดค่าทางฟิสิกส์:
เนื่องจากสัญญาณทั้งสองมาจากตำแหน่งเดียวกันบนสเกลวัด เซนเซอร์นี้จึงไม่ไวต่อการเคลื่อนที่ในแนวขวางและการหมุน ในทางปฏิบัติ ทำให้ได้คุณสมบัติที่เสถียรของการเปลี่ยนแปลงการวัดเป็นคาบ ความแรงสนามของสเกลเปลี่ยนแปลงในทิศทาง y จากสเกล ทำให้สนามแม่เหล็กหักล้างกันในระยะห่างไกลจากสเกล ในช่วงใกล้ ที่ระยะห่างประมาณหนึ่งความยาวคาบ ความแรงสนามแม่เหล็กลดลงแบบเอ็กซ์โพเนนเชียลตามระยะทางในทิศทาง y
สเกลแม่เหล็ก
SCHNEEBERGER ผลิตรางนำรางร่องที่มีสเกลวัดแบบรวม สเกลแม่เหล็กที่มีสนามแม่เหล็กเปลี่ยนแปลงเป็นคาบ (N-S-N-S-N-S...) สามารถใช้กับเซนเซอร์ MR สำหรับการวัดระยะแบบ Incremental
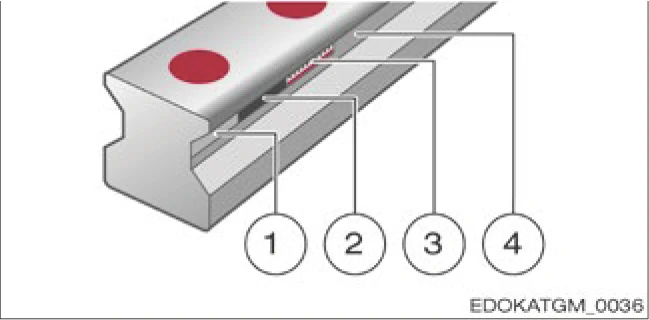
โครงสร้างสเกลแม่เหล็กในรางรีดรางนำ
โครงสร้างสเกลแม่เหล็ก:
ส่วนประกอบระบบ
ระบบ AMS ที่ทำงานได้สมบูรณ์ประกอบด้วย:
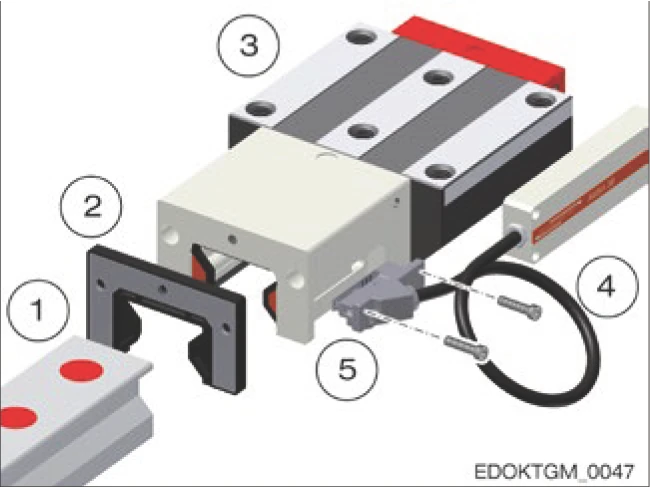
ส่วนประกอบระบบวัด AMS ที่สมบูรณ์
- รางนำ พร้อมสเกลวัดแบบรวม
- อุปกรณ์เสริม สำหรับการติดตั้งและการเชื่อมต่อ
- แคร่เลื่อนวัด เป็นหน่วยสมบูรณ์
- สกรู สำหรับการติดตั้งหัวอ่าน
- หัวอ่าน ที่มีเซนเซอร์และอิเล็กทรอนิกส์
แคร่เลื่อนวัดประกอบด้วยแคร่ MONORAIL พร้อมเปลือกนอกที่ติดตั้งด้านข้าง เปลือกนอกมีช่องตัดพร้อมพื้นผิวรองรับสำหรับการติดตั้งหัวอ่าน หัวอ่านยึดกับเปลือกนอกด้วยสกรู ทำให้เปลี่ยนแทนได้ง่าย
การสุ่มตัวอย่างแบบสัมผัส
สำหรับการประมวลผลสัญญาณ Incremental ที่ถูกต้อง ต้องรักษาระยะทำงานที่สม่ำเสมอ ระหว่างเซนเซอร์และสเกลวัด เนื่องจากไม่สามารถบรรลุความคลาดเคลื่อนเล็กน้อยนี้ผ่านโครงสร้างการปรับที่แข็งแกร่ง ระบบวัดระยะ AMS จึงใช้หลักการวัดแบบเลื่อนสัมผัส
เซนเซอร์ MR ถูกบรรจุในเปลือกรองเท้า รักษาตำแหน่งแนวนอนด้วยสปริงแผ่น และกดลงบนสเกลวัดด้วยสปริงอัด เปลือกรองเท้ามีพื้นผิวเลื่อนที่เจียรแล้ว ซึ่งผ่านพื้นผิวเหล่านี้ทำให้ตั้งค่าและรักษาระยะทำงานที่คงที่ระหว่างเซนเซอร์และสเกลวัด
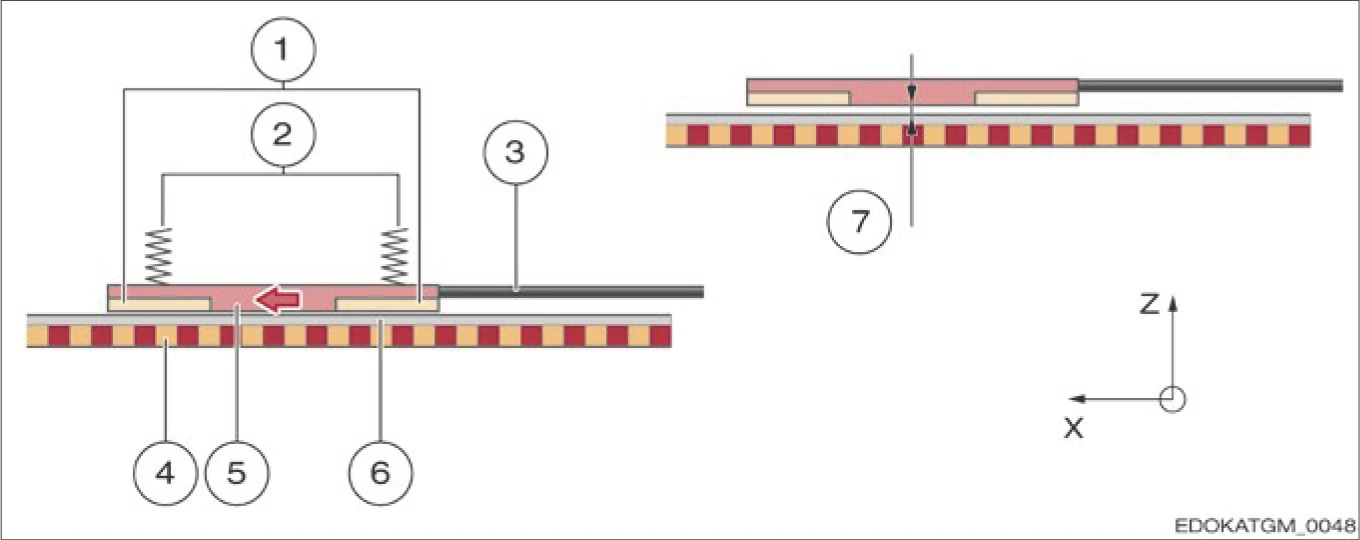
ชุดการสุ่มตัวอย่างแบบสัมผัสสำหรับระบบวัดระยะ AMS
คำอธิบายส่วนประกอบ:
รองเท้ายังสร้างขอบที่ขูด ซึ่งอนุภาคขนาดใหญ่และของเหลวไม่สามารถผ่านได้ นอกจากนี้ ที่ขูดของเปลือกนอกด้านบนต้องสมบูรณ์เพื่อให้มีสภาพการทำงานที่มีประสิทธิภาพสำหรับการสุ่มตัวอย่างแบบสัมผัส
โครงสร้างนี้รับประกันว่าชิ้นส่วนที่สึกหรอง่ายและอิเล็กทรอนิกส์เฉพาะทั้งหมดอยู่ในหัวอ่าน เนื่องจากการติดตั้งด้านข้าง หัวอ่านสามารถเปลี่ยนได้ง่ายมาก ความคลาดเคลื่อนการผลิตที่เล็กน้อยรับประกันว่าหัวอ่านสามารถเปลี่ยนได้ง่ายในสนาม ในขณะที่รางนำพร้อมสเกลยังคงนิ่ง
3.1.4 ระบบวัดระยะ
การแทรกค่า
สำหรับงานวัดระยะ การแทรกค่าหมายถึงการแปลงสัญญาณอินพุตอนาล็อกเป็นสัญญาณเอาต์พุตดิจิทัล ที่มีคาบสัญญาณเล็กกว่า สิ่งนี้จำเป็นเพราะไม่สามารถสร้างการอ่านตัวนับและ/หรือการอ่านตำแหน่งโดยตรงจากสัญญาณอนาล็อก
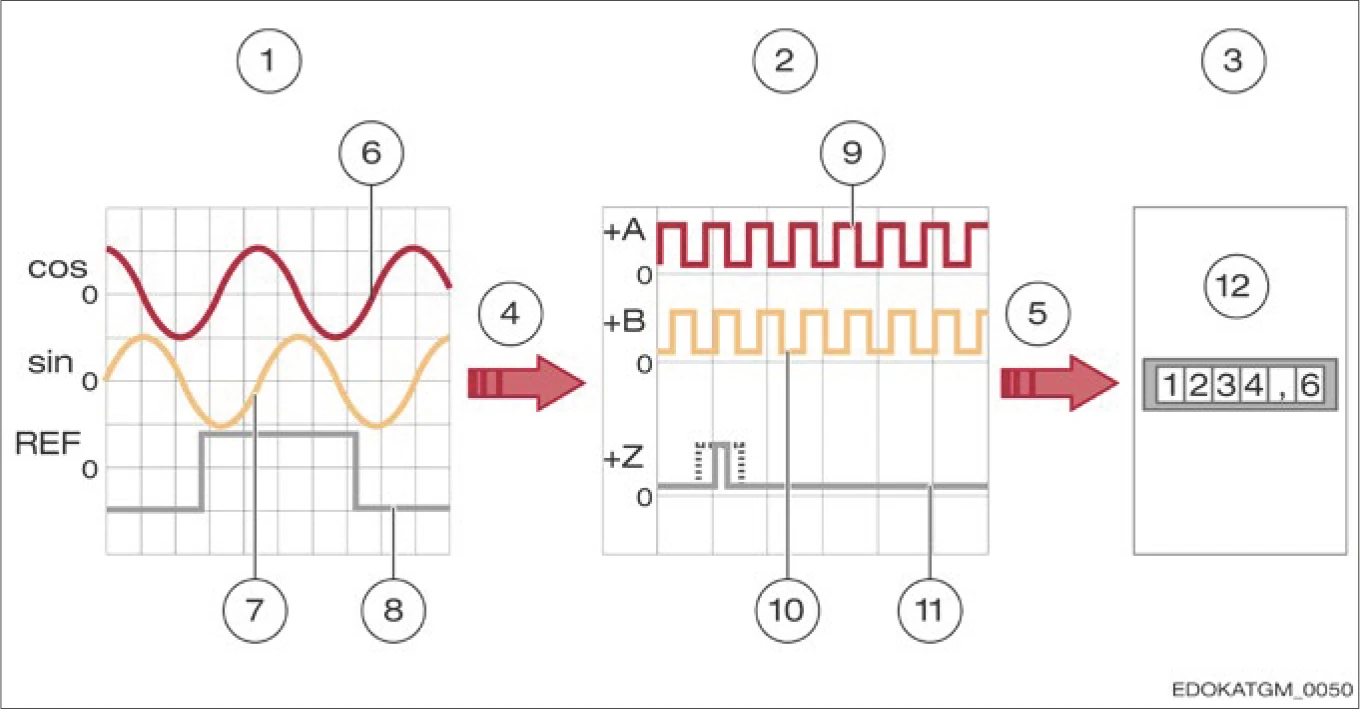
สัญญาณอินพุตอนาล็อก (sin, cos, Ref) ถูกแทรกค่า (ลูกศรสีแดง) กับสัญญาณเอาต์พุตดิจิทัล (+A, +B, +Z) สัญญาณกลับเฟสไม่ได้แสดง
สำหรับวัตถุประสงค์นี้ อัตราส่วนการแทรกค่ากำหนดอัตราส่วนคาบสัญญาณของสัญญาณอินพุตอนาล็อกต่อสัญญาณเอาต์พุตดิจิทัล
การส่งสัญญาณและการประเมิน
สัญญาณดิจิทัลประกอบด้วยสัญญาณ Incremental สองตัว +A และ +B และสัญญาณอ้างอิง +R ส่งไปยังอิเล็กทรอนิกส์ปลายทาง ซึ่งอาจเป็นตัวนับวัดง่าย ๆ PC หรือตัวควบคุมเครื่อง อิเล็กทรอนิกส์ปลายทางกำหนดค่าตำแหน่งจากสัญญาณดิจิทัลโดยการนับขอบสัญญาณ ทิศทางการนับถูกกำหนดโดยระดับของช่องที่เกี่ยวข้อง ขึ้นอยู่กับจำนวนขอบที่ประเมิน เราเรียกว่า:
การประเมินขอบเดี่ยว
นับเพียงขอบเดียวของช่องหนึ่ง หนึ่งขั้นวัด = หนึ่งคาบสัญญาณดิจิทัล
การประเมินขอบคู่
นับขอบขาขึ้นและขาลงของช่องหนึ่ง หนึ่งขั้นวัด = ครึ่งคาบสัญญาณ
การประเมินสี่ขอบ
นับขอบทั้งหมดของทั้งสองช่อง หนึ่งขั้นวัด = หนึ่งในสี่ของคาบสัญญาณ (ความละเอียดสูงสุด)
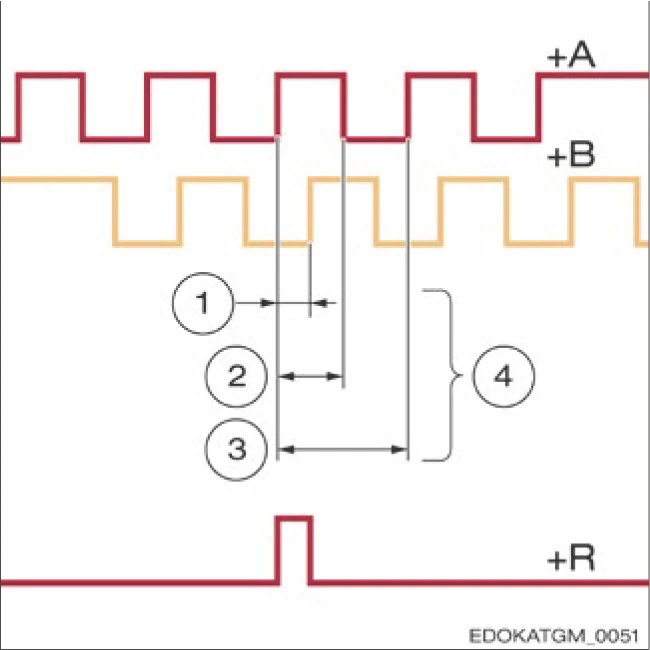
การเปรียบเทียบวิธีการประเมินขอบ
การควบคุมแอมพลิจูด (AGC - Automatic Gain Control)
การควบคุมแอมพลิจูดหมายถึงฟังก์ชันของอิเล็กทรอนิกส์ประเมิน SCHNEEBERGER AMS เพื่อปรับแอมพลิจูดเอาต์พุตให้ได้ค่าที่กำหนด ในระบบ AMS ค่าชั่วขณะของสัญญาณไซน์และโคไซน์จะถูกดิจิไทซ์ และคำนวณแอมพลิจูดตามนั้น ค่าที่คำนวณได้จะถูกเปรียบเทียบกับค่าระบุ และปรับแรงดัน bridge Ub ของเซนเซอร์ MR ตามนั้น ผลลัพธ์คือค่าเอาต์พุตแรงดันที่เสถียร หลังการปรับจะสร้างค่าชั่วขณะที่ดีขึ้น
ข้อกำหนด MONORAIL AMS
- เวลาควบคุม: ระหว่าง 2 kHz ถึง 10 kHz
- ปรับแรงดัน bridge โดยอัตโนมัติเพื่อรักษาเอาต์พุตที่เสถียร
- ปรับคุณภาพสัญญาณอย่างต่อเนื่อง
ฟังก์ชัน Power Sense
ผลิตภัณฑ์ AMS ทั้งหมดติดตั้งสาย Power Sense (ดูรูปขาสำหรับการตอบรับแรงดันไฟจ่าย) เพื่อชดเชยการลดแรงดันในสายจ่ายไฟยาว หากตัวควบคุมที่ใช้รองรับฟังก์ชันนี้ เราแนะนำให้ใช้เพื่อรับประกันการทำงานที่เชื่อถือได้ของหัวอ่าน
คุณสมบัติหลัก
- สาย Power Sense รวมอยู่ในผลิตภัณฑ์ AMS ทั้งหมด
- ชดเชยการลดแรงดันในสายไฟยาว
- ปรับปรุงความน่าเชื่อถือในการทำงานของหัวอ่าน
- ฟังก์ชันตัวเลือก (ต้องการการรองรับจากตัวควบคุม)
ระดับความแม่นยำ
ระดับความแม่นยำระบุความเบี่ยงเบนการวัดสูงสุดที่คาดหวังของระบบ ภายใต้สภาพการทำงานที่กำหนด ระบบวัดระยะที่มีระดับความแม่นยำ 5 µm อนุญาตให้มีความเบี่ยงเบน ±5 µm สำหรับวัตถุประสงค์การเปรียบเทียบ ระดับความแม่นยำระบุโดยอ้างอิงความยาว 1 เมตร
แนวคิดสำคัญ
- นิยาม: ความเบี่ยงเบนการวัดสูงสุดที่คาดหวัง
- เงื่อนไข: ทำงานภายใต้สภาพแวดล้อมที่กำหนด
- ตัวอย่าง: ระดับความแม่นยำ 5 µm = ความเบี่ยงเบน ±5 µm
- ความยาวอ้างอิง: 1 เมตร (สำหรับการระบุ)
ความละเอียด
ความละเอียดอธิบายการเปลี่ยนแปลงตำแหน่งที่เล็กที่สุดที่สามารถวัดได้ในระบบวัดระยะ ถูกกำหนดโดยคาบสัญญาณอนาล็อก อัตราส่วนการแทรกค่า และขั้นตอนการประเมิน (เวลารวมหรืออัตราการสุ่มตัวอย่าง) ตัวอย่างเช่น ด้วยอัตราส่วนการแทรกค่าที่ตั้งไว้ที่ 100 และคาบสัญญาณอินพุต 200 µm คาบสัญญาณเอาต์พุตคือ 2 µm และด้วยการประเมินสี่ขอบในตัวควบคุม ความละเอียดคือ 0.5 µm
การคำนวณความละเอียด
- ขึ้นอยู่กับ: คาบสัญญาณอนาล็อก × อัตราส่วนการแทรกค่า × วิธีการประเมิน
- ตัวอย่าง: สัญญาณ 200 µm × การแทรกค่า 100 = สัญญาณเอาต์พุต 2 µm
- การประเมินสี่ขอบ: 2 µm ÷ 4 = ความละเอียด 0.5 µm
อัตราการสุ่มตัวอย่าง
อัตราการสุ่มตัวอย่างอธิบายความถี่ที่สัญญาณอนาล็อกถูกสุ่มตัวอย่างต่อช่วงเวลา โดยทั่วไปช่วงเวลาคือหนึ่งวินาที ดังนั้นหน่วยของอัตราการสุ่มตัวอย่างคือ Hz ตามทฤษฎีบท Nyquist-Shannon ความถี่การสุ่มตัวอย่างควรอย่างน้อยเป็นสองเท่าของความถี่สัญญาณต้นฉบับ เพื่อรับประกันการทำสำเนาสัญญาณต้นฉบับที่สมบูรณ์โดยประมาณ
หลักการสำคัญ
- กำหนดเป็น: ความถี่ต่อช่วงเวลา
- หน่วยมาตรฐาน: Hz (ตัวอย่างต่อวินาที)
- ทฤษฎีบท Nyquist-Shannon: ความถี่การสุ่มตัวอย่าง ≥ 2 × ความถี่สัญญาณ
- รับประกัน: การทำสำเนาสัญญาณที่แม่นยำ
ข้อผิดพลาดจากการกลับทิศ / ฮิสเทอรีซิส
หากทำการวัดความสามารถทำซ้ำในการกำหนดตำแหน่งซ้ำ ๆ สลับกันในทิศทางตรงกันข้าม โดยใช้การตั้งค่าการทดสอบที่เหมาะสมในแต่ละกรณี สามารถพบความแตกต่างตำแหน่งเฉลี่ยของระบบวัดระยะระหว่างการเข้าถึงจากขวาและจากซ้าย ความแตกต่างนี้เรียกว่าข้อผิดพลาดจากการกลับทิศหรือฮิสเทอรีซิส SCHNEEBERGER ระบุค่านี้ในเอกสารข้อมูลทางเทคนิค ความสามารถทำซ้ำทิศทางเดียวมักต่ำกว่าค่าฮิสเทอรีซิสที่ระบุอย่างมีนัยสำคัญ
ความสามารถทำซ้ำ
ความสามารถทำซ้ำทิศทางเดียวของระบบวัดระยะโดยทั่วไปเข้าใจว่าเป็นความสามารถ ของระบบเฉพาะในการทำซ้ำผลลัพธ์ภายใต้สภาพแวดล้อมที่เหมือนกันทุกประการ ในการประเมินนี้ ต้องทราบข้อผิดพลาดการวัดและรวมไว้ในการวิเคราะห์ ความสามารถทำซ้ำของเครื่องมือกลสามารถกำหนดได้โดยใช้วิธีการง่าย ๆ สำหรับตำแหน่งเฉพาะและทิศทางการเดินทางเฉพาะ ในการประเมินความสามารถทำซ้ำ จะทำการวัดหลายครั้งและคำนวณค่าเฉลี่ยและค่าเบี่ยงเบนมาตรฐาน
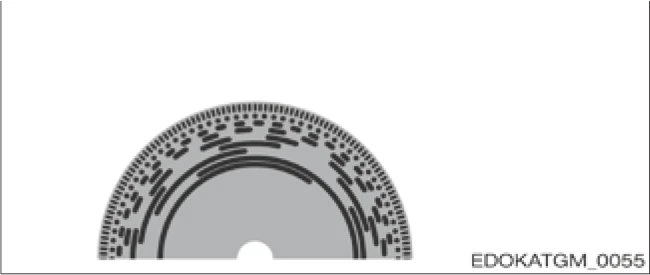
แผนผังการวัดฮิสเทอรีซิสและความสามารถทำซ้ำ
แผนผังการวัด:
การอ้างอิง (Referencing)
ระบบวัดแบบ Incremental (เช่น AMS-3B และ AMS-4B) ไม่สามารถกำหนดตำแหน่งสัมบูรณ์หลังจากเปิดเครื่อง จึงมีการเพิ่มรางแม่เหล็กอีกหนึ่งราง คือรางอ้างอิง เข้าไปในรางแบบ Incremental สามารถตั้งจุดอ้างอิงเดี่ยว กริดจุดอ้างอิง หรือจุดอ้างอิงที่เข้ารหัสระยะทางบนรางอ้างอิงนี้ได้ ต้องดำเนินการเคลื่อนที่อ้างอิงเพื่ออ้างอิงระบบ
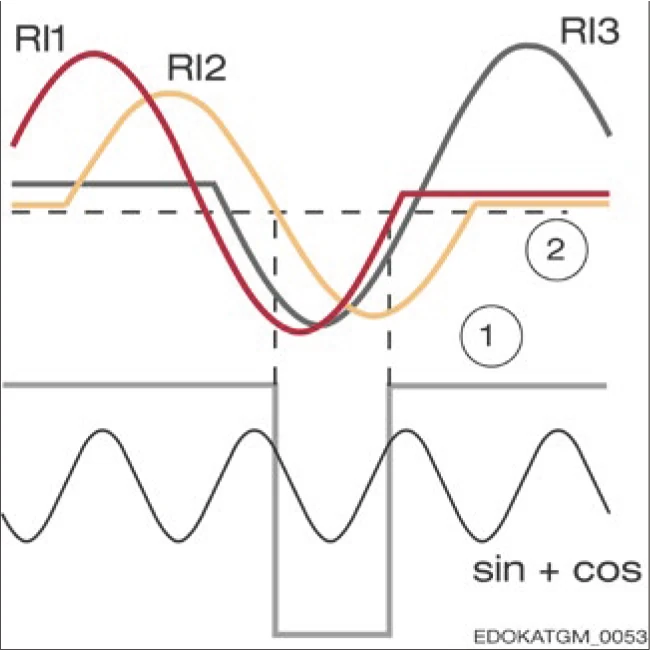
ตัวนับจึงสามารถใช้สัญญาณอ้างอิงเพื่อแก้ไขตัวนับภายในให้เป็นค่าที่กำหนด ในกระบวนการนี้ ตัวนับจะรับรู้ตำแหน่งที่กำหนดไว้ล่วงหน้าของสัญญาณ Incremental สัมพันธ์กัน ซึ่งโดยปกติคือ SIN = COS และทั้งสองมากกว่าศูนย์ เป็นข้อมูลเพิ่มเติม REF = "high" รูปต่อไปนี้แสดงเส้นทางสัญญาณกลับเฟส ซึ่งหมายความว่าค่าลบของสัญญาณแสดงไว้
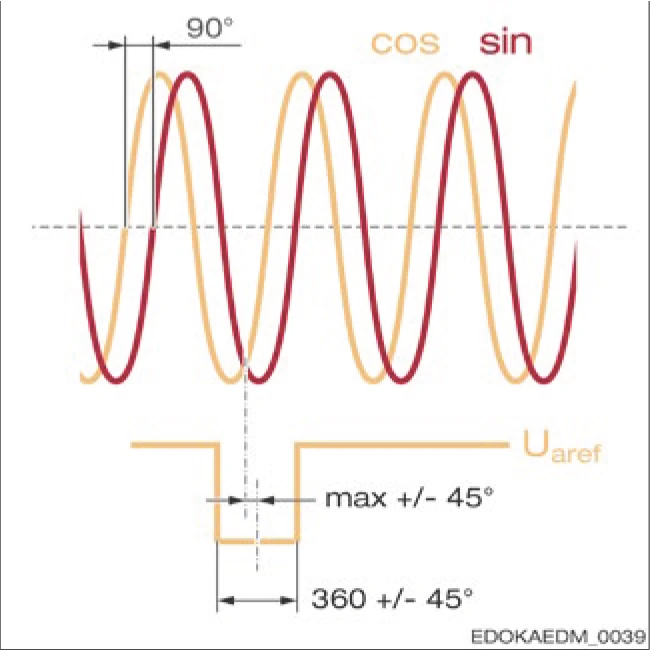
อินเทอร์เฟซสัญญาณอ้างอิง (แรงดันอนาล็อก)
การระบุสัญญาณอ้างอิง
- SIN = COS ความสัมพันธ์สัญญาณ
- สัญญาณทั้งสองมากกว่าศูนย์
- สัญญาณ REF = "high"
- ต้องการการเคลื่อนที่อ้างอิง เพื่อสร้างตำแหน่ง
- อินเทอร์เฟซแรงดันอนาล็อก: TSU/TRU/TMI
- คาบสัญญาณ: 200 µm
จุดอ้างอิงเดี่ยว
จุดอ้างอิงเดี่ยวแสดงฟังก์ชันที่ง่ายที่สุดของรางอ้างอิง ซึ่งสามารถตั้งไว้ที่ตำแหน่งใดก็ได้บนสเกล ที่ SCHNEEBERGER จุดอ้างอิงหนึ่งจุดประกอบด้วยเครื่องหมายอ้างอิงแม่เหล็กสามตัว ซึ่งสุ่มตัวอย่างโดยใช้ MR bridge แยกต่างหากโดยไม่มีการหาค่าเฉลี่ย ข้อมูลอ้างอิงหนึ่งแสดงขอบขาขึ้นของพัลส์อ้างอิง อีกหนึ่งแสดงขอบขาลง ข้อมูลอ้างอิงที่สามซ้ำซ้อน ใช้เพื่อปรับปรุงความน่าเชื่อถือในการทำงานของระบบระบุจุดอ้างอิง
ระบบระบุจุดอ้างอิง
ส่วนประกอบระบบ:
กริดจุดอ้างอิง
ในกรณีของกริดจุดอ้างอิง จุดอ้างอิงหลายจุดจะถูกตั้งไว้ที่ระยะเท่ากันตลอดสเกล ลูกค้าเลือกจุดอ้างอิงหนึ่งจากเหล่านี้สำหรับการอ้างอิงแกน
เมื่อเทียบกับจุดอ้างอิงเดี่ยว ข้อดีของกริดคือประการแรกการลดระยะช่วงชักอ้างอิง โดยการใช้องค์ประกอบเพิ่มเติมภายนอก (ลูกเบี้ยว สวิตช์ความใกล้ชิด ฯลฯ) อย่างมีเป้าหมาย แต่ยังสามารถทำงานกับแคร่เลื่อนวัดหลายตัวบนรางนำเดียวได้ สำหรับวัตถุประสงค์นี้ จุดอ้างอิงเดี่ยวตามสเกลจะถูกกำหนดให้กับแคร่เลื่อนวัดที่แตกต่างกัน สำหรับการอ้างอิงที่เกี่ยวข้อง
ข้อดีเมื่อเทียบกับจุดอ้างอิงเดี่ยว
- ลดระยะช่วงชักอ้างอิง
- รองรับแคร่เลื่อนหลายตัว
- ตัวเลือกการเลือกที่ยืดหยุ่น
- การรวมเข้ากับระบบอัตโนมัติของเครื่องที่ดีกว่า
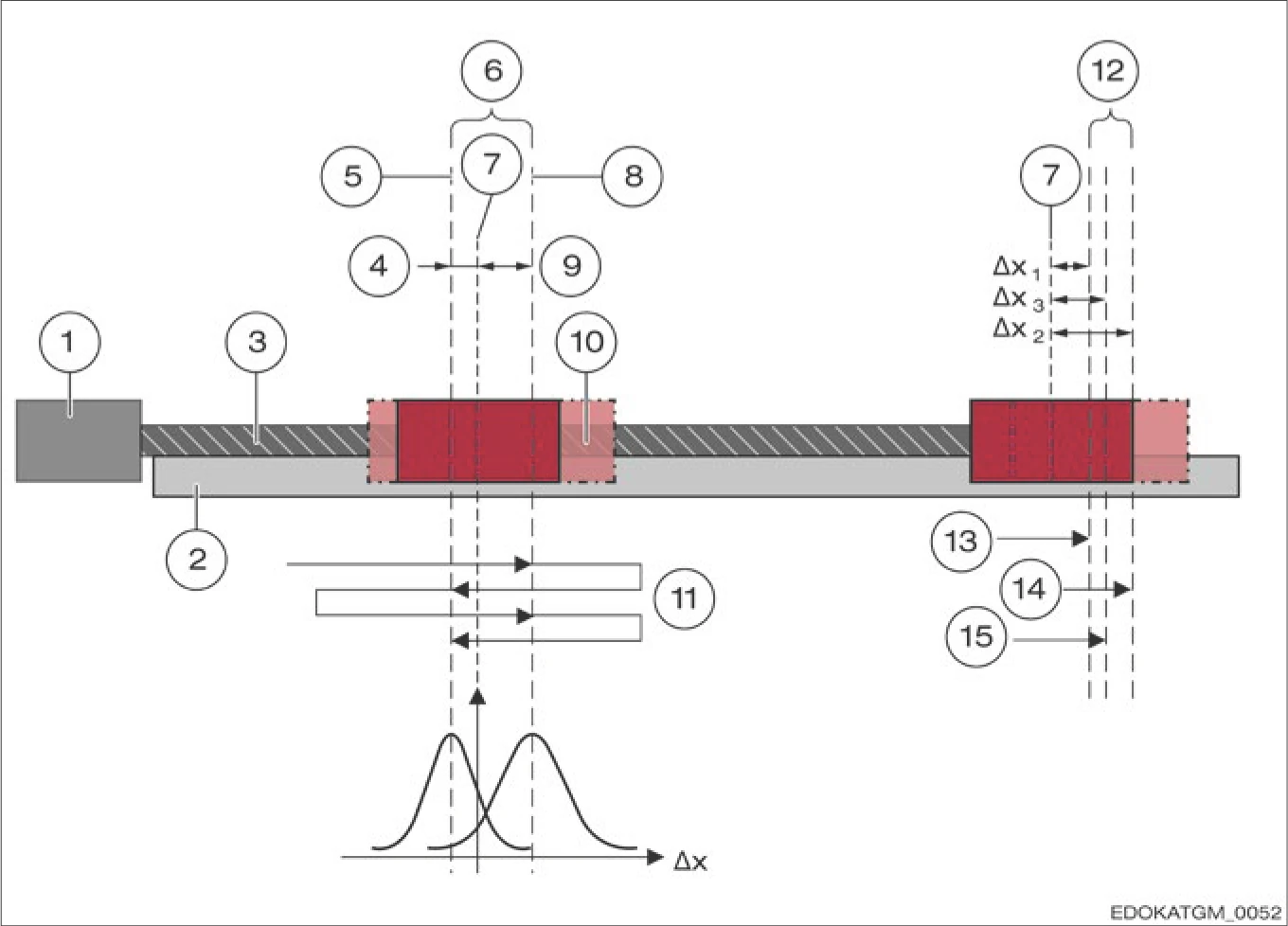
การเข้ารหัสระยะทาง
ในกรณีของจุดอ้างอิงที่เข้ารหัสระยะทาง จุดเหล่านั้นจะถูกจัดเรียงบนสเกล ให้ระยะห่างระหว่างจุดอ้างอิงสองจุดแต่ละจุดปรากฏเพียงครั้งเดียว ตัวอย่างเช่น หากคุณข้ามจุดอ้างอิงสามจุดบนรางนำระบบวัดระยะ ตัวควบคุมสามารถคำนวณตำแหน่งสัมบูรณ์ได้ นี่แสดงถึงมาตรฐานอุตสาหกรรมที่ได้รับการรองรับจากผู้ผลิตตัวควบคุมหลายราย
ค่า 100 โดยทั่วไประบุเป็นคาบฐาน แสดงถึงระยะทางที่ต้องเดินทางในกรณีที่เลวร้ายที่สุด เพื่อให้การอ้างอิงสมบูรณ์ คาบฐานกำหนดความยาวสูงสุดที่สามารถเข้ารหัสได้ สำหรับแกนสั้น ควรเลือกคาบฐานที่เล็กกว่าเพื่อลดระยะทางเดินทางสูงสุดที่จำเป็น
ดังนั้น SCHNEEBERGER เสนอจุดอ้างอิงที่เข้ารหัสระยะทางเฉพาะลูกค้า พร้อมคาบฐานที่แตกต่างกันสำหรับผลิตภัณฑ์ AMS ของตน
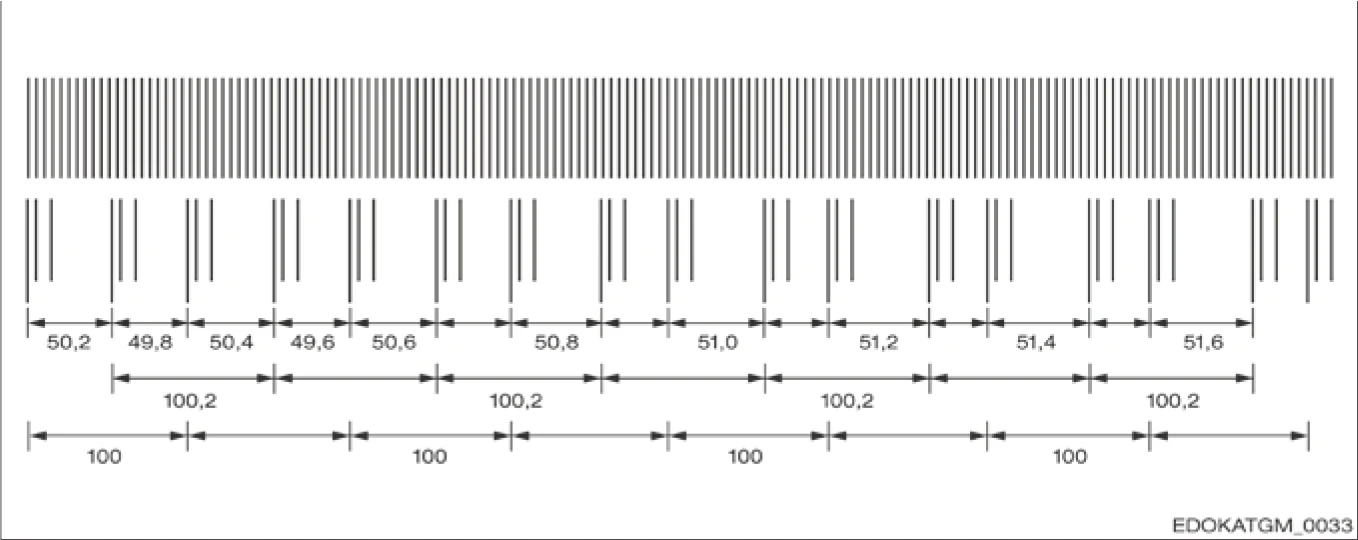
แผนผังหลักการเข้ารหัสระยะทาง
การเข้ารหัสสัมบูรณ์
สำหรับระบบวัดสัมบูรณ์ รางที่มีการเข้ารหัสสัมบูรณ์จะใช้แทนรางอ้างอิง ระบบการเข้ารหัสนี้ใช้แบบอนุกรมบนรางเดียวหรือแบบขนานบนรางหลายราง ในทางทฤษฎี ควรสามารถวัดระยะทางได้โดยใช้รางนี้เพียงอย่างเดียว แต่เนื่องจากความละเอียดของรหัสนี้ค่อนข้างเล็ก รางการเข้ารหัสสัมบูรณ์มักใช้ร่วมกับรางแบบ Incremental ดังนั้นรหัสสัมบูรณ์กำหนดคาบสัญญาณที่ระบบวัดอยู่ และความละเอียดละเอียดภายในคาบสัญญาณนั้นได้จากการแทรกค่าสัญญาณ Incremental
กราฟิกต่อไปนี้ให้ตัวอย่างของระบบการเข้ารหัส:
การเข้ารหัสอนุกรม (Serial-coded)
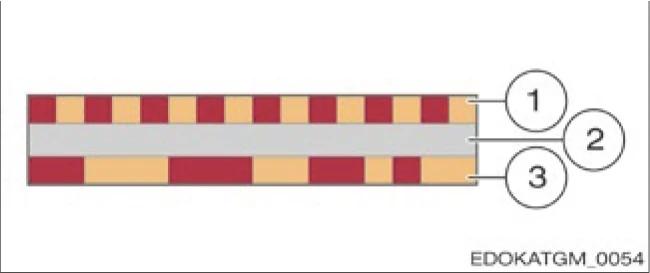
รางแทรกค่าแบบการเข้ารหัสอนุกรม
คำอธิบายส่วนประกอบ:
การเข้ารหัสขนาน (Parallel-coded)
แผ่นพัลส์แบบการเข้ารหัสขนาน
คุณสมบัติ:
ในกรณีของรางที่เข้ารหัสอนุกรม ตำแหน่งสัมบูรณ์สามารถกำหนดได้โดยการเปรียบเทียบสองคาบสัญญาณต่อเนื่องเท่านั้น ดังนั้น แม้ว่าตำแหน่งสัมบูรณ์เป็นที่รู้จัก แต่ก็ใช้สองขั้นตอนที่แตกต่างกัน
ความเป็นไปได้หนึ่งคือการใช้เซนเซอร์ที่ยาวพอที่จะครอบคลุมรหัสที่จำเป็นเพื่อกำหนดตำแหน่งสัมบูรณ์ ดังนั้นพวกมันสามารถกำหนดตำแหน่งสัมบูรณ์ได้โดยตรงที่ตำแหน่งใดก็ได้
ความเป็นไปได้อีกอย่างคือการสร้างอิเล็กทรอนิกส์ประเมินบนพื้นฐานสองช่อง แม้ว่าเครื่องจะปิด ช่องหนึ่งยังคงทำงานตลอดเวลา (บัฟเฟอร์แบตเตอรี่) และกำหนดการเปลี่ยนแปลงตำแหน่งใด ๆ ของแกน เมื่อเครื่องเปิด ข้อมูลตำแหน่งความละเอียดต่ำนี้จะรวมกับข้อมูลตำแหน่งความละเอียดสูง จากช่องอื่นเพื่อให้ได้ตำแหน่งสัมบูรณ์ที่ถูกต้อง
SCHNEEBERGER ใช้การสแกนแบบบัฟเฟอร์แบตเตอรี่สำหรับการกำหนดตำแหน่งสัมบูรณ์ สำหรับวัตถุประสงค์นี้ รางอ้างอิงที่เข้ารหัสระยะทางพิเศษจะถูกใช้กับรางนำเป็นรางสัมบูรณ์ ระบบวัดกำหนดระยะทางระหว่างเครื่องหมายอ้างอิงสามตัวที่อยู่ติดกัน และกำหนดตำแหน่งสัมบูรณ์ชั่วขณะโดยการจับคู่ค่าที่กำหนดกับเมทริกซ์ที่จัดเก็บไว้ ในตัวอย่างนี้ หัวอ่านผ่านเครื่องหมายอ้างอิงสามตัวและกำหนดระยะห่าง "1" (รหัส Y) และ "5" (รหัส X) จากนั้นสามารถกำหนดตำแหน่งสัมบูรณ์ "Pos 1:5" ให้กับค่าที่วัดได้สองค่าเหล่านี้ในเมทริกซ์สองมิติ
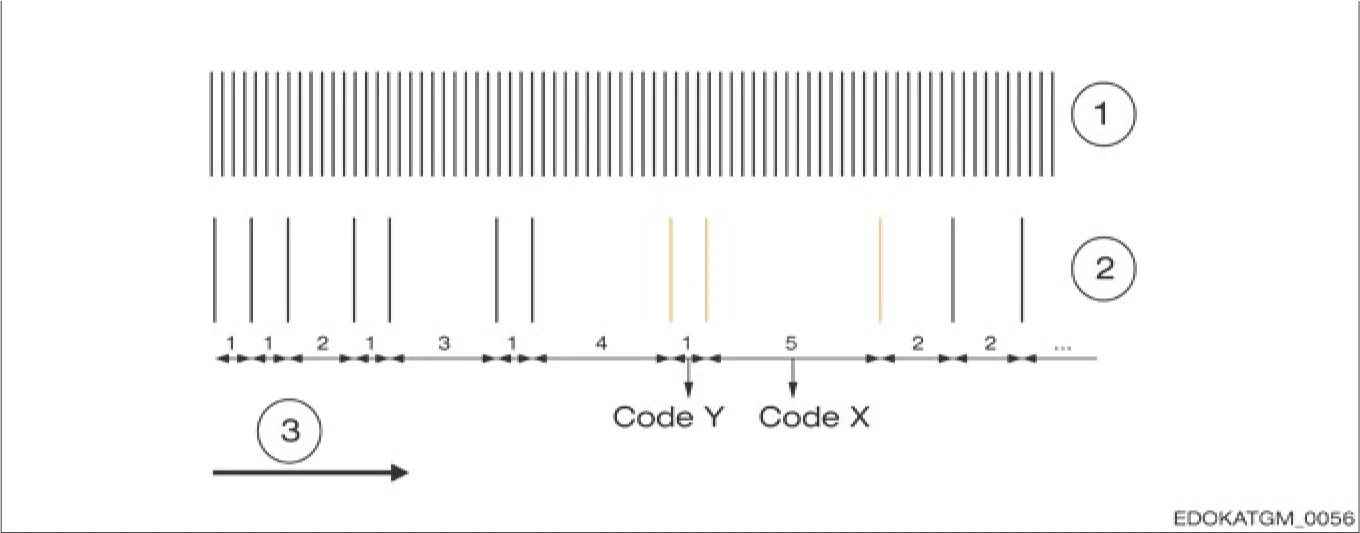
ตัวอย่างการกำหนดตำแหน่งโดยใช้การสแกนแบบบัฟเฟอร์แบตเตอรี่
ส่วนประกอบแผนผัง:
ความเบี่ยงเบนการวัดระยะหนึ่งมิติ
เมทริกซ์สองมิติ
| รหัส Y/รหัส X | 1 | 2 | 3 | 4 | 5 | ... |
|---|---|---|---|---|---|---|
| 1 | Pos 1;1 | Pos 1;2 | Pos 1;3 | Pos 1;4 | Pos 1;5 | ... |
| 2 | Pos 2;1 | Pos 2;2 | Pos 2;3 | Pos 2;4 | Pos 2;5 | ... |
| 3 | Pos 3;1 | Pos 3;2 | Pos 3;3 | Pos 3;4 | Pos 3;5 | ... |
| 4 | Pos 4;1 | Pos 4;2 | Pos 4;3 | Pos 4;4 | Pos 4;5 | ... |
| 5 | Pos 5;1 | Pos 5;2 | Pos 5;3 | Pos 5;4 | Pos 5;5 | ... |
| ... | ... | ... | ... | ... | ... | Pos Y;X |
เพื่อประเมินคุณภาพสเกลวัด SCHNEEBERGER ใช้ขั้นตอนที่รองรับ "แนวทาง VDI/VDE 2617 สำหรับการตรวจสอบการวัดระยะโดยใช้ DIN EN ISO 10360-2" ในกระบวนการนี้ เน้นที่การได้ประโยชน์สูงสุดสำหรับลูกค้าในแง่ของข้อกำหนดทางเทคนิค ข้อมูลทางเทคนิคใช้ข้อกำหนดความเบี่ยงเบนการวัดระยะสามประเภทที่แตกต่างกัน:
- ความเบี่ยงเบนเป็นคาบ
- ความเบี่ยงเบนการวัดระยะตลอดเส้นทาง 40 mm
- ความเบี่ยงเบนการวัดระยะตลอดเส้นทาง 1 m
เพื่อรักษาคุณภาพสเกล จะสร้างเส้นโค้งขีดจำกัดสำหรับความเบี่ยงเบนที่อนุญาต เส้นโค้งขีดจำกัดและความเบี่ยงเบนการวัดสำหรับความยาวอ้างอิงที่แตกต่างกัน ที่ลูกค้าใช้โดยทั่วไปจะแสดงในแผนภูมิ
ดังนั้น อนุญาตให้มีการแทรกค่าระหว่างข้อกำหนดของระบบวัด SCHNEEBERGER
ความเบี่ยงเบนเป็นคาบ
ระบบวัดระยะแบบ Incremental ทั้งหมดมีผลของความเบี่ยงเบนเป็นคาบ ซึ่งความยาวคลื่นสอดคล้องกับระยะพิทช์สเกลหรือเศษส่วนของระยะพิทช์สเกล ความเบี่ยงเบนเป็นคาบหรือความเบี่ยงเบนคลื่นสั้นนี้เกิดจากความเบี่ยงเบนเล็กน้อย ในเซนเซอร์หรือการประมวลผลสัญญาณไฟฟ้า ดังนั้นสัญญาณไซน์และโคไซน์จึงเบี่ยงเบนจากรูปร่างที่แม่นยำทางคณิตศาสตร์ ความเบี่ยงเบนสามารถจำแนกได้ตามการจัดเรียง (ฮาร์โมนิก)
| คาบ KWF | ความเบี่ยงเบนเกิดจาก |
|---|---|
| 1 คาบสัญญาณ | ออฟเซ็ตไซน์/โคไซน์ |
| 1/2 คาบสัญญาณ | แอมพลิจูดไซน์และโคไซน์ต่างกัน |
| 1/3 - 1/8 คาบสัญญาณ | เซนเซอร์ส่งสัญญาณที่แตกต่างจากรูปร่างคลื่นไซน์พื้นฐาน |
ข้อผิดพลาดการแทรกค่า
หากความเบี่ยงเบนเป็นคาบเกิดขึ้นเฉพาะระหว่างการดิจิไทซ์และการคำนวณตำแหน่ง เรียกว่าข้อผิดพลาดการแทรกค่า ในบางกรณีนี้สามารถเกิดขึ้นได้ง่ายเมื่อวงจรผู้ส่งและผู้รับไม่ตรงกันอย่างแม่นยำ
ข้อผิดพลาดตัวเปรียบเทียบ / ข้อผิดพลาด Abbe
ข้อผิดพลาดตัวเปรียบเทียบ หรือที่เรียกว่าข้อผิดพลาด Abbe คือความเบี่ยงเบนเป็นระบบที่เกิดขึ้นเมื่อแกนของมาตรฐานความยาวและแกนของมาตรฐานระยะทางไม่ตรงกัน สาเหตุของความเบี่ยงเบนคือการเคลื่อนที่หมุนเล็กน้อยในการออกแบบแกน ซึ่งส่งผลต่อผลการวัด
สรุปวิธีการกำหนดตำแหน่งสัมบูรณ์
1. วิธีการอิงเซนเซอร์:
- เซนเซอร์ยาวครอบคลุมรหัสที่จำเป็น
- กำหนดตำแหน่งสัมบูรณ์โดยตรง
- ไม่ต้องการการเปรียบเทียบคาบตามลำดับ
2. วิธีการบัฟเฟอร์แบตเตอรี่สองช่อง:
- ช่องหนึ่งทำงานตลอดเวลา (บัฟเฟอร์แบตเตอรี่)
- ช่องที่สองความละเอียดสูงเมื่อมีไฟ
- ความสามารถติดตามตำแหน่งเมื่อเครื่องปิด
- รวมความละเอียดต่ำและสูงเมื่อเปิดเครื่อง