7 คำนิยามและคำศัพท์
7.1 โมดูลอินเทอร์เฟซ
ในโมดูลอินเทอร์เฟซ ข้อมูลจากเซ็นเซอร์จะถูกแปลงเป็นสัญญาณอะนาล็อกมาตรฐาน (1 Vpp) หรือสัญญาณดิจิทัลมาตรฐาน (TTL)
- สัญญาณได้รับการขยาย
- ข้อผิดพลาดเฟสระหว่างสัญญาณไซน์และโคไซน์ได้รับการแก้ไข
- ออฟเซ็ตได้รับการชดเชย
โมดูลอินเทอร์เฟซดิจิทัลยังรวมอินเทอร์โพเลเตอร์ที่แปลงสัญญาณอะนาล็อกเป็นสัญญาณดิจิทัล สำหรับข้อมูลเพิ่มเติม ดูบทที่ 6.2 "การอินเทอร์โพเลต"
7.1.1 การเปรียบเทียบโมดูลอินเทอร์เฟซอะนาล็อกและดิจิทัล
| ดิจิทัล | อะนาล็อก | |
|---|---|---|
| ชื่อย่อ | D | A |
| ข้อดี |
|
|
| ข้อเสีย | ความถี่สูงมากที่ความเร็วสูงและความละเอียดสูง | การปรับเทียบซ้ำที่ไซต์ลูกค้าไม่สามารถทำได้ ซึ่งหมายความว่าต้องเปลี่ยนระบบทั้งหมด (รางนำและโมดูลอินเทอร์เฟซ) ในกรณีที่เกิดข้อบกพร่อง |






7.2 ระดับความแม่นยำ
ระดับความแม่นยำระบุการเบี่ยงเบนการวัดสูงสุดที่คาดได้ของระบบภายใต้เงื่อนไขการทำงานที่กำหนด ระบบวัดระยะทางที่มีระดับความแม่นยำ 3 μm อนุญาตให้มีการเบี่ยงเบน ± 3 μm
7.3 ความสามารถในการทำซ้ำ
ความสามารถในการทำซ้ำแบบทิศทางเดียวของระบบวัดโดยทั่วไปหมายถึงความสามารถในการทำซ้ำผลลัพธ์ที่ระบบเฉพาะส่งคืนภายใต้สภาพแวดล้อมที่เหมือนกันทุกประการ ในการประเมินนี้ การเบี่ยงเบนการวัดต้องเป็นที่ทราบและนำมาพิจารณาในการวิเคราะห์
ความสามารถในการทำซ้ำของตำแหน่งแกนสามารถกำหนดได้สำหรับความเร็วเคลื่อนที่เฉพาะโดยใช้วิธีง่ายๆ โดยการคำนวณค่าเฉลี่ยเลขคณิตและส่วนเบี่ยงเบนมาตรฐานของการวัดจำนวนมาก
7.4 การอ้างอิง
ระบบวัด incremental ไม่สามารถกำหนดตำแหน่งที่แน่นอนหลังเปิดเครื่อง ด้วยเหตุนี้จึงเพิ่มแทร็กอีกแทร็กหนึ่งข้างแทร็ก incremental ซึ่งเรียกว่าแทร็กอ้างอิง หนึ่งหรือหลายจุดอ้างอิงสามารถทำเครื่องหมายบนแทร็กอ้างอิง
การวิ่งอ้างอิงของแคร่เลื่อนจำเป็นสำหรับการอ้างอิงระบบ แกนโดยปกติจะเคลื่อนที่ในทิศทางหนึ่งจนถึงจุดหยุดกลไก จากนั้นแกนเคลื่อนที่กลับจนกว่าจะครอบคลุมเครื่องหมายอ้างอิง โดยทั่วไป เครื่องหมายอ้างอิงแบบระยะเท่ากันมักเข้าถึงจากทิศทางเดียวกันเสมอ (ทิศทางเดียว)
คอนโทรลเลอร์สามารถปรับเปลี่ยนเคาน์เตอร์ภายในเป็นค่าที่กำหนดโดยใช้สัญญาณอ้างอิง สำหรับโมดูลอินเทอร์เฟซอะนาล็อก คอนโทรลเลอร์รับรู้ตำแหน่งที่กำหนดไว้ล่วงหน้าสำหรับสัญญาณ incremental (โดยปกติคือ SIN = COS และทั้งสองมากกว่าศูนย์) รวมถึง REF = "high" เป็นตำแหน่งอ้างอิง
7.5 การเบี่ยงเบนเป็นคาบ
ระบบวัดระยะทาง incremental ทั้งหมดได้รับผลกระทบจากการเบี่ยงเบนเป็นคาบ ซึ่งความยาวคลื่นสอดคล้องกับช่วงการแบ่งหรือเศษส่วนของมัน การเบี่ยงเบนเป็นคาบนี้ เรียกว่าการเบี่ยงเบนคลื่นสั้น (SWD) เกิดขึ้นจากการเบี่ยงเบนเล็กน้อยในระบบเซ็นเซอร์หรือการประมวลผลสัญญาณไฟฟ้า ซึ่งหมายความว่าสัญญาณไซน์และโคไซน์เบี่ยงเบนจากรูปแบบทางคณิตศาสตร์ที่แน่นอน การเบี่ยงเบนสามารถจำแนกตามการจัดเรียง (ฮาร์โมนิก)
| คาบ SWD | การเบี่ยงเบนเกิดจาก |
|---|---|
| 1 คาบสัญญาณ | ออฟเซ็ตของไซน์/โคไซน์ |
| 1/2 คาบสัญญาณ | แอมพลิจูดไซน์และโคไซน์แตกต่างกัน |
| 1/3 – 1/8 คาบสัญญาณ | เซ็นเซอร์ส่งสัญญาณที่แตกต่างจากรูปคลื่นไซน์อย่างมีนัยสำคัญ |
7.5.1 ข้อผิดพลาดในการอินเทอร์โพเลต
หากการเบี่ยงเบนเป็นคาบเกิดขึ้นเฉพาะในระหว่างการแปลงเป็นดิจิทัลและการคำนวณตำแหน่ง เรียกว่าข้อผิดพลาดในการอินเทอร์โพเลต
7.6 ข้อผิดพลาดของตัวเปรียบเทียบ
ข้อผิดพลาดของตัวเปรียบเทียบ หรือเรียกว่าข้อผิดพลาด Abbe เป็นการเบี่ยงเบนอย่างเป็นระบบที่เกิดขึ้นเมื่อแกนของมาตรฐานความยาวไม่ตรงกับแกนของมาตรฐานระยะทาง สาเหตุของการเบี่ยงเบนคือการเคลื่อนที่หมุนเล็กน้อยในการออกแบบแกน ซึ่งมีผลต่อผลการวัด
7.7 อัตราการสุ่มตัวอย่าง
อัตราการสุ่มตัวอย่างอธิบายความถี่ที่สัญญาณอะนาล็อกถูกสุ่มตัวอย่างต่อช่วงเวลา โดยปกติช่วงเวลาคือหนึ่งวินาที ดังนั้นหน่วยของอัตราการสุ่มตัวอย่างจึงเป็น Hz เพื่อรับประกันการสร้างสัญญาณต้นฉบับอย่างสมบูรณ์ ความถี่การสุ่มตัวอย่างควรเป็นอย่างน้อยสองเท่าของสัญญาณต้นฉบับตามทฤษฎีการสุ่มตัวอย่างของ Nyquist–Shannon
7.8 การส่งสัญญาณแบบ Single-Ended
สำหรับการส่งสัญญาณแบบ single-ended แรงดันจะเปลี่ยนแปลงสัมพันธ์กับศักย์อ้างอิง (กราวด์ไฟฟ้า) นี่เป็นวิธีที่ง่ายและสะดวกในการถ่ายโอนข้อมูล ต้องการเพียงสายเดียวต่อสัญญาณ
ข้อเสียคือความไวต่อสัญญาณรบกวนค่อนข้างสูง ดังนั้นการส่งสัญญาณประเภทนี้ควรใช้เฉพาะสำหรับระยะทางสั้นและความเร็วต่ำ
7.9 การส่งสัญญาณแบบดิฟเฟอเรนเชียล
สำหรับการส่งสัญญาณแบบดิฟเฟอเรนเชียล สัญญาณถูกอธิบายด้วยความต่างแรงดันโดยไม่อ้างอิงกับกราวด์ไฟฟ้า แทนที่จะใช้ตัวนำสัญญาณเดี่ยว จะใช้สายเคเบิลคู่ สายหนึ่งนำสัญญาณและอีกสายนำสัญญาณกลับขั้ว คอนโทรลเลอร์จากนั้นสร้างผลต่างระหว่างสัญญาณทั้งสองเป็นสัญญาณผลต่าง (เช่น สัญญาณ A+ และ A- กลายเป็น A)
การส่งสัญญาณแบบดิฟเฟอเรนเชียลเป็นวิธีที่ดีกว่าสำหรับการประยุกต์ใช้งานส่วนใหญ่เนื่องจากทนทานต่อสัญญาณรบกวนมากกว่า การคัปปลิ้งกับสัญญาณเกือบเหมือนกันสำหรับสายทั้งสองเส้น ดังนั้นสัญญาณรบกวนจึงถูกกำจัดเกือบหมดเมื่อสร้างผลต่าง
มาตรฐาน RS422 (ดิฟเฟอเรนเชียล) ถูกพัฒนาเฉพาะสำหรับระยะทางยาวและอัตราการถ่ายโอนสูง
7.10 ทิศทางการเคลื่อนที่
ทิศทางการเคลื่อนที่สามารถอ่านได้จากความสัมพันธ์เฟสของสัญญาณไฟฟ้า สัญญาณหนึ่งนำหน้าหรือตามหลังอีกสัญญาณหนึ่ง ขึ้นอยู่กับทิศทาง
โมดูลอินเทอร์เฟซดิจิทัล: หากแคร่เลื่อนเคลื่อนที่ในทิศทางของ flexprint สัญญาณบนช่อง A นำหน้าช่อง B 90° จากนี้คอนโทรลเลอร์รับรู้ทิศทางการเคลื่อนที่เป็นบวก หมายความว่าเคาน์เตอร์นับขึ้น ในทิศทางอื่น สัญญาณบนช่อง A ตามหลังช่อง B 90° เคาน์เตอร์นับลง
โมดูลอินเทอร์เฟซอะนาล็อก: ทิศทางการนับกลับกัน
8 คำแนะนำการประยุกต์ใช้งาน
8.1 เงื่อนไขการทำงานสำหรับระบบวัด MINISCALE PLUS
MINISCALE PLUS มีระบบวัดแบบออปติกแบบเปิด เช่นเดียวกับระบบออปติกทุกระบบ สิ่งปนเปื้อน เช่น ฝุ่นจะรบกวนการทำงานของระบบ ดังนั้นไม่แนะนำให้ใช้ MINISCALE PLUS ในการประยุกต์ใช้งานที่คาดว่าจะมีฝุ่น เศษโลหะ อนุภาค หรือของเหลวในระหว่างการทำงาน รอยขีดข่วนใหญ่หรือความเสียหายประเภทอื่นต่อสเกลขนาดก็มีผลเสียเช่นกัน
โดยทั่วไป MINISCALE PLUS เหมาะที่สุดสำหรับการใช้งานในสภาพแวดล้อมที่สะอาด โดยเฉพาะในสถานการณ์ที่ใช้อุปกรณ์ออปติกอื่นๆ หรือที่มีสภาพแวดล้อมที่สะอาด
ในแง่นี้ MINISCALE PLUS แตกต่างจากระบบวัดระยะทาง AMS ซึ่งออกแบบเฉพาะสำหรับสภาพแวดล้อมที่รุนแรงกว่า
8.2 คุณสมบัติ EMC ของ MINISCALE PLUS
MINISCALE PLUS และอุปกรณ์เสริมได้รับการทดสอบตามมาตรฐาน EN 61000 ผลการทดสอบยืนยันว่า MINISCALE PLUS เป็นไปตามข้อกำหนดของมาตรฐาน อย่างไรก็ตาม นี่ไม่ได้กำจัดความเป็นไปได้ของการรบกวนแม่เหล็กไฟฟ้าที่ไม่ต้องการในกรณีการประยุกต์ใช้งานเฉพาะ การปฏิบัติตามแนวทาง EMC ที่เกี่ยวข้องมีความจำเป็นเสมอ
8.3 ผลกระทบจากสนามแม่เหล็กต่อ MINISCALE PLUS
สนามแม่เหล็กสถิตไม่มีผลต่อ MINISCALE PLUS ผลการเหนี่ยวนำอาจเกิดขึ้นได้กับสนามแม่เหล็กสลับ ขึ้นอยู่กับการจัดวางสายเคเบิล
9 การแก้ปัญหา
9.1 การปรับเทียบโมดูลอินเทอร์เฟซดิจิทัล
การปรับเทียบจำเป็นเฉพาะสำหรับการส่งมอบโมดูลอินเทอร์เฟซดิจิทัลในภายหลังเท่านั้น! การปรับเทียบโดยลูกค้าไม่สามารถทำได้สำหรับโมดูลอินเทอร์เฟซอะนาล็อก
ขั้นตอน:
- เปิด MINISCALE PLUS
- กดและค้างปุ่มปรับเทียบ A
- เลื่อนรางนำช้าๆ ตลอดความยาวช่วงชัก (4 ถึง 5 ครั้ง)
- ปล่อยปุ่มปรับเทียบ
- รีเซ็ต MINISCALE PLUS (= ปิดและเปิดเครื่องใหม่)
- ขับรางนำตลอดความยาวช่วงชักและตรวจสอบว่ามีเพียง LED สีเขียวที่สว่าง
- หาก LED สีแดงสว่าง ต้องทำซ้ำขั้นตอนการปรับเทียบ
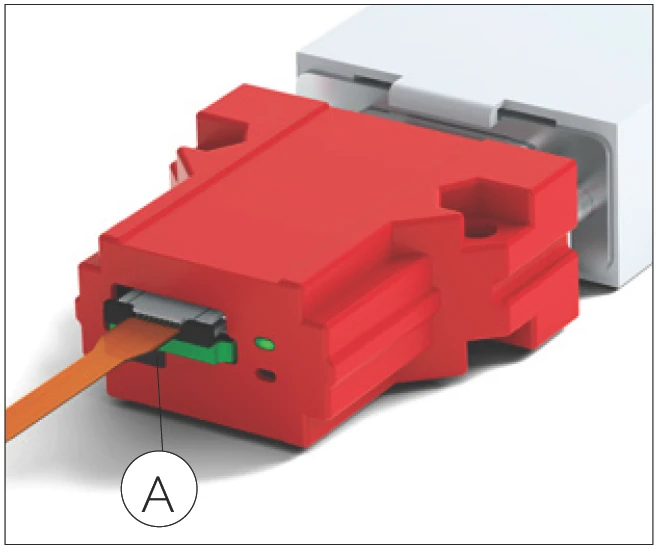
โมดูลอินเทอร์เฟซมีฝาครอบ
A ปุ่มปรับเทียบ
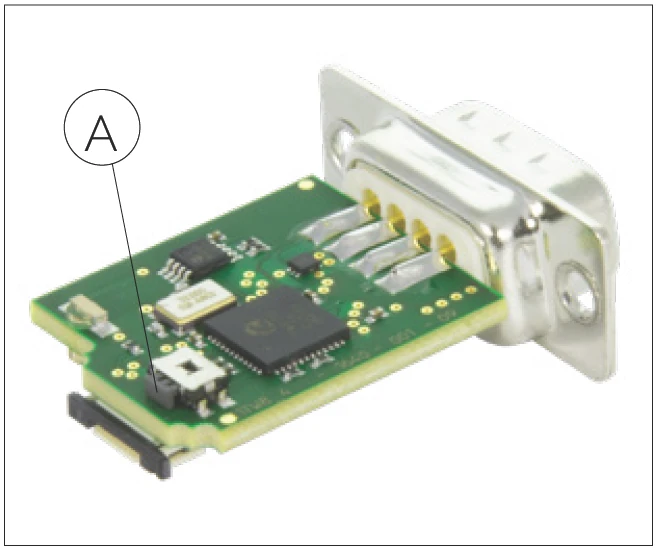
โมดูลอินเทอร์เฟซไม่มีฝาครอบ
A ปุ่มปรับเทียบ
9.2 คำอธิบายข้อผิดพลาด
| ข้อผิดพลาด | สาเหตุที่เป็นไปได้ | วิธีแก้ไข |
|---|---|---|
| LED สีเขียวบนโมดูลอินเทอร์เฟซไม่สว่าง | ไม่มีแรงดันไฟเลี้ยงหรือแรงดันไฟเลี้ยงไม่ถูกต้องที่โมดูลอินเทอร์เฟซ | ตรวจสอบแรงดันไฟเลี้ยง (+5V DC) |
| การกำหนดขาสายเคเบิลของลูกค้าไม่ถูกต้อง | ตรวจสอบการกำหนดขา | |
| คอนเนคเตอร์ D-Sub 9 หรือ Micro Match ไม่ได้ต่ออย่างถูกต้อง | ตรวจสอบการเชื่อมต่อ | |
| MINISCALE PLUS ได้รับความเสียหายจากการจัดการที่ไม่ถูกต้อง (ไม่เป็นไปตามข้อกำหนด ESD) | เปลี่ยน MINISCALE PLUS | |
| LED สีแดงบนโมดูลอินเทอร์เฟซสว่าง | แรงดันไฟเลี้ยงไม่ถูกต้องที่โมดูลอินเทอร์เฟซ | ตรวจสอบแรงดันไฟเลี้ยง (+5V DC) |
| แผงเซ็นเซอร์แบบยืดหยุ่นไม่ได้เชื่อมต่อกับโมดูลอินเทอร์เฟซ | เชื่อมต่อแผงเซ็นเซอร์แบบยืดหยุ่น | |
| แผงเซ็นเซอร์แบบยืดหยุ่นไม่ได้เชื่อมต่ออย่างถูกต้องกับโมดูลอินเทอร์เฟซ พื้นผิวหน้าสัมผัสหมุน 180° | หมุนแผงเซ็นเซอร์แบบยืดหยุ่น 180° | |
| แผงเซ็นเซอร์แบบยืดหยุ่นไม่ได้เสียบเต็มในคอนเนคเตอร์ ZIF | ตรวจสอบการเชื่อมต่อ | |
| แผงเซ็นเซอร์แบบยืดหยุ่นเสียหายหรือพับงอ (เช่น รอยแตกเส้นผมบนหน้าสัมผัส) | เปลี่ยน MINISCALE PLUS | |
| MINISCALE PLUS ได้รับความเสียหายจากการจัดการที่ไม่ถูกต้อง (ไม่เป็นไปตามข้อกำหนด ESD) | เปลี่ยน MINISCALE PLUS | |
| สัญญาณอินพุตเซ็นเซอร์อยู่นอกช่วงปกติ เช่น เนื่องจากสเกลขนาดสกปรก | ทำความสะอาดและเคลือบสเกลขนาดตามที่อธิบายในบทที่ 3.3 การปรับเทียบซ้ำเป็นไปได้กับระบบดิจิทัล (ดูบทที่ 9.1) | |
| LED สีแดงเรืองแสงเล็กน้อย | เอาต์พุต "ERR NOT" เชื่อมต่อกับอินพุตความต้านทานต่ำ ทำให้กระแสเล็กน้อยไหลผ่าน LED | เชื่อมต่อเอาต์พุต "ERR NOT" กับอินพุตความต้านทานสูง หรือละเว้น LED ที่เรืองแสง |
| ข้อมูลตำแหน่งไม่ตรงกับระยะทางเคลื่อนที่ | ความถี่อินพุตสูงสุดของคอนโทรลเลอร์ลูกค้าเกิน | ลดความเร็วเคลื่อนที่หรือความละเอียด |
| ตั้งค่าความละเอียดในคอนโทรลเลอร์ลูกค้าไม่ถูกต้อง | ปรับการตั้งค่าในคอนโทรลเลอร์ลูกค้า | |
| ตัวคูณการประเมินขอบต่ำเกินไป | ตั้งการประเมิน X4 ขอบในคอนโทรลเลอร์ลูกค้า | |
| การรบกวนแม่เหล็กไฟฟ้า | ดำเนินมาตรการป้องกัน EMC: ใช้สายเคเบิลมีชีลด์แบบบิดเป็นคู่ เดินสายมอเตอร์และสายควบคุมแยกกัน ฯลฯ | |
| แผงเซ็นเซอร์แบบยืดหยุ่นเสียหายหรือพับงอ (เช่น รอยแตกเส้นผมบนหน้าสัมผัส) | เปลี่ยน MINISCALE PLUS | |
| สเกลขนาดสกปรกมาก | ทำความสะอาดและเคลือบสเกลขนาดตามที่อธิบายในบทที่ 3.3 เปลี่ยนระบบหากจำเป็น | |
| ความผิดปกติในโมดูลอินเทอร์เฟซดิจิทัล | ความเร็วสูงสุด 3.2 m/s เกิน (ที่ความละเอียด 0.1 μm) | จำกัดความเร็วเป็น 3.2 m/s หรือลดความละเอียด |
| หมายเลขบนโมดูลอินเทอร์เฟซไม่ตรงกับหมายเลขแคร่เลื่อน MINISCALE PLUS | ตรวจสอบการจับคู่โมดูลอินเทอร์เฟซและรางนำ | |
| ปรับเทียบตามที่อธิบายในบทที่ 9.1 ส่งระบบกลับไปยัง SCHNEEBERGER | ||
| ความผิดปกติในโมดูลอินเทอร์เฟซอะนาล็อก | หมายเลขบนโมดูลอินเทอร์เฟซไม่ตรงกับหมายเลขแคร่เลื่อน MINISCALE PLUS | ตรวจสอบการจับคู่โมดูลอินเทอร์เฟซและรางนำ |
| ส่งระบบกลับไปยัง SCHNEEBERGER เพื่อปรับเทียบ | ||
| ไม่ตรวจพบเครื่องหมายอ้างอิง | ไม่ได้ผ่านเครื่องหมายอ้างอิง | ปรับระยะทางเคลื่อนที่ |
| รางนำสกปรก | ทำความสะอาดและเคลือบสเกลขนาดตามที่อธิบายในบทที่ 3.3 | |
| ส่งระบบกลับไปยัง SCHNEEBERGER | ||
| การแสดงตำแหน่งไม่ถูกต้องกับ USB counter Heilig & Schwab | อะนาล็อก: อินเทอร์โพเลเตอร์มีตัวคูณการอินเทอร์โพเลตคงที่ 256 ทำให้ความละเอียด 0.39 μm | คำนวณด้วยความละเอียดที่สอดคล้องกัน |
| ความถี่อินพุตสูงสุดของอินพุตดิจิทัลคือ 500 kHz ดังนั้นที่ความละเอียด 0.1 μm ความเร็วจำกัดเป็น 0.2 m/s (counter 026) หรือ 0.4 m/s (counter 046) | ลดความเร็วหรือความละเอียด | |
| ข้อผิดพลาดอื่นๆ | ต้องการการตรวจสอบเพิ่มเติม | ติดต่อ SCHNEEBERGER |