AMS อินเทอร์เฟซหัวอ่าน
Read Head Interfaces
ภาพรวมประเภทขั้วต่อ
SCHNEEBERGER มีขั้วต่ออินเทอร์เฟซหลายประเภทเพื่อรองรับระบบควบคุมและความต้องการในการใช้งานที่แตกต่างกัน

TSU/TSD ขั้วต่อ 12 ขา

TRU/TRD ขั้วต่อ 12 ขา

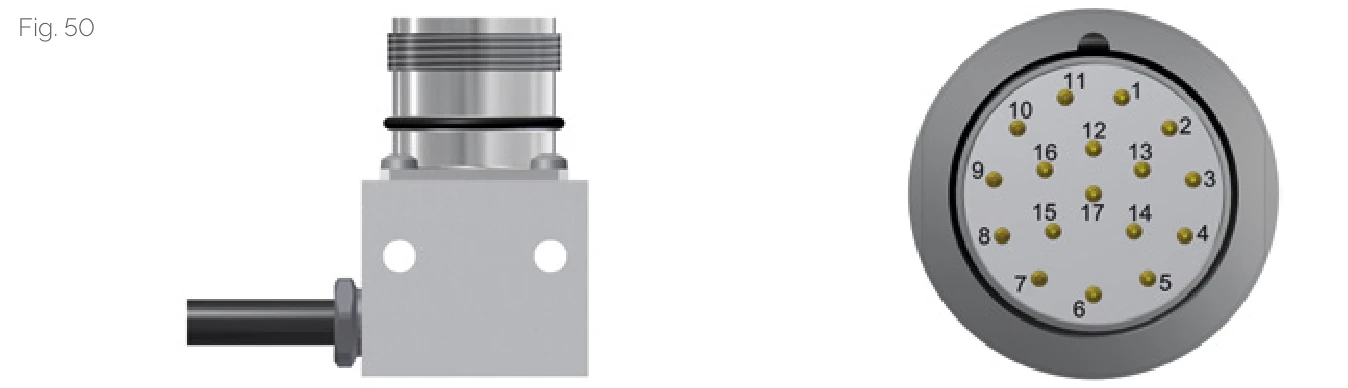
TRH ขั้วต่อ 17 ขา

TMU/TMD ฐานติดตั้ง
TMH ฐานติดตั้ง 17 ขา

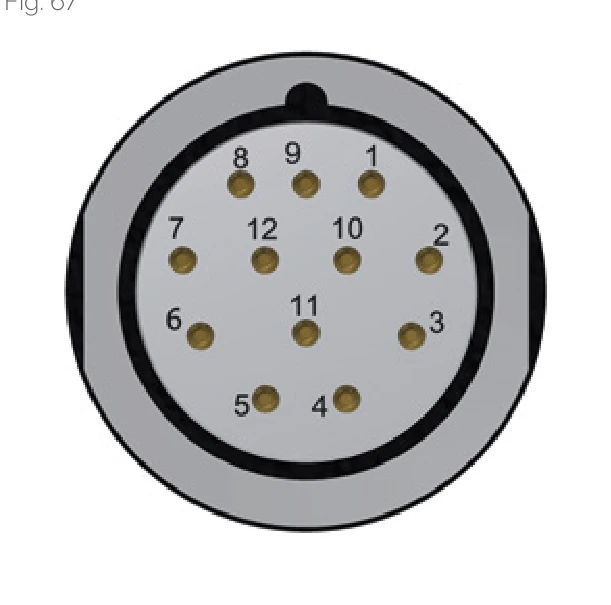
TDC เปลือกอิเล็กทรอนิกส์ 8 ขา
| รหัสอินเทอร์เฟซ | ประเภท | รูปแบบขั้วต่อ | ความยาวสาย |
|---|---|---|---|
| TSU / TSD | ขั้วต่อวงกลม 12 ขา (ตัวเมีย) | น็อตยึดและเกลียวตัวเมีย | 3 ม. |
| TRU / TRD | ขั้วต่อวงกลม 12 ขา (ตัวผู้) | เกลียวตัวผู้ | 3 ม. |
| TRH | ขั้วต่อวงกลม 17 ขา (ตัวผู้) | เกลียวตัวผู้ | 3 ม. |
| TMU / TMD | ขั้วต่อวงกลม 12 ขา (ฐานติดตั้ง) | ฝังในฐานติดตั้ง | 0.3 ม. |
| TMH | ขั้วต่อวงกลม 17 ขา (ฐานติดตั้ง) | ฝังในฐานติดตั้ง | 0.3 ม. |
| TDC | ขั้วต่อวงกลม 8 ขา (ตัวผู้) | เกลียวตัวผู้ฝังในเปลือกอิเล็กทรอนิกส์ | - |
อินเทอร์เฟซแอนะล็อก TSU/TRU/TMU
สัญญาณอินครีเมนทัลถูกส่งออกแบบดิฟเฟอเรนเชียล (สัญญาณแรงดันเทียบกับกราวด์) โดยระดับความแม่นยำกำหนดความสัมพันธ์ระหว่างสัญญาณอินครีเมนทัลและสัญญาณอ้างอิง R1-R5
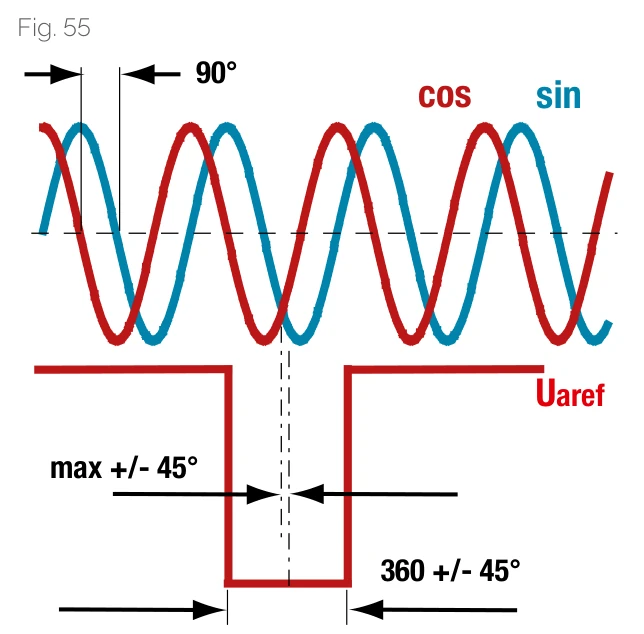
รูปคลื่นสัญญาณอินเทอร์เฟซแอนะล็อก

ผังขา TSU/TRU/TMU
การกำหนดขา
| ขา | สัญญาณ | คำอธิบาย |
|---|---|---|
| 1 | 0V | สัญญาณ A quasi B |
| 2 | - | ฟีดแบ็กแรงดันไฟฟ้า |
| 3 | +UA0 | สัญญาณอ้างอิง |
| 4 | -UA0 | สัญญาณอ้างอิง (ซิงโครนัส) |
| 5 | +UA | สัญญาณ A quasi B |
| 6 | -UA | Sine |
| 7 | +UB | สัญญาณ A quasi B |
| 8 | -UB | +Cosine |
| 9 | - | NC |
| 10 | 0V GND1 | แรงดันไฟฟ้า |
| 11 | 0V | ฟีดแบ็กแรงดันไฟฟ้า |
| 12 | 0V+ | ฟีดแบ็กแรงดันไฟฟ้า |
อินเทอร์เฟซดิจิทัล TSD/TRD/TMD
สัญญาณอินครีเมนทัล A+, A-, B+, B- และสัญญาณอ้างอิง R+, R- ถูกส่งแบบคอมพลีเมนทารีตามมาตรฐาน RS 422 ไดอะแกรมแสดงสัญญาณบวก โดยระดับสัญญาณมีดังนี้:
| High | > 2.5 V |
| Low | < 0.5 V |
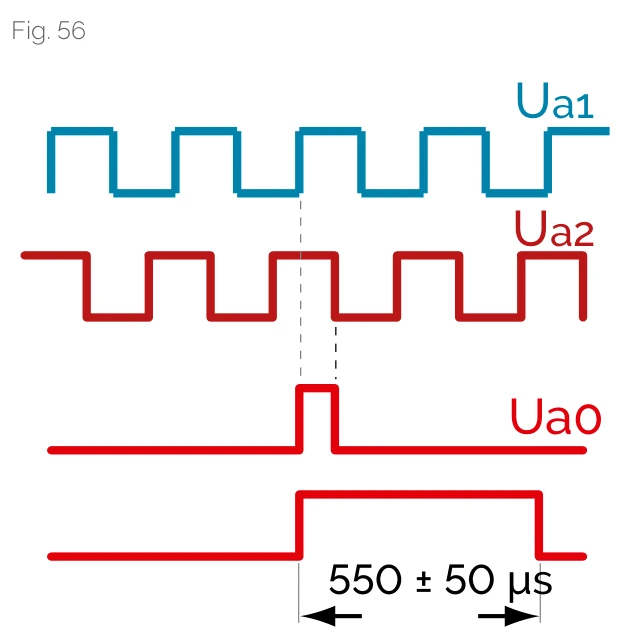
ไดอะแกรม timing อินเทอร์เฟซดิจิทัล
ผังขา TRD/TMD
เวลา rise และ fall น้อยกว่า 20 ns ระยะห่างสัญญาณขั้นต่ำคำนวณได้จากความถี่เอาต์พุตสูงสุด วงจรอิเล็กทรอนิกส์ต่อเชื่อมต้องรองรับความถี่เอาต์พุตสูงสุดได้โดยไม่มีปัญหา
ตัวเลือก Reference Pulse
ตัวเลือก ZN
Reference pulse ถูกซิงโครไนซ์อย่างเคร่งครัดกับสัญญาณอินครีเมนทัล
ตัวเลือก ZF
Reference pulse ถูกขยายเป็น 550 us +/- 50 us ตัวเลือกนี้เหมาะสำหรับวงจรประมวลผลที่ไม่สามารถรองรับ reference pulse ระยะสั้นหลายชุดได้
การรวมกันของค่า interpolation ความถี่เอาต์พุตสูงสุด และ reference pulse
การรวมกันต่อไปนี้ใช้กับอินเทอร์เฟซหัวอ่านทุกรุ่น:
| รหัส | ความละเอียด | ค่า Interpolation | ความถี่เอาต์พุตสูงสุด |
|---|---|---|---|
| -010-80-ZN | 5 um | 10x | 8 MHz |
| -050-80-ZN | 1 um | 50x | 8 MHz |
| -250-80-ZN | 0.2 um | 250x | 8 MHz |
| -010-80-ZF | 5 um | 10x | 8 MHz |
| -050-80-ZF | 1 um | 50x | 8 MHz |
| -250-80-ZF | 0.2 um | 250x | 8 MHz |
ตัวอย่างรหัสสั่งซื้อ
-010-80-ZN- interpolation 10x ความถี่เอาต์พุตสูงสุด 8 MHz reference pulse มาตรฐาน
การกำหนดขา TSD/TRD/TMD
| ขา | สัญญาณ | ฟังก์ชัน |
|---|---|---|
| 1 | +24 V | แรงดันไฟฟ้า (บวก) |
| 2 | TXD (service only) | การสื่อสารกับโปรแกรม service |
| 3 | RXP | รับข้อมูล + |
| 4 | RXN | รับข้อมูล - |
| 5 | GND (0V) | แรงดันไฟฟ้า (ลบ) |
| 6 | TXN | ส่งข้อมูล - |
| 7 | TXP | ส่งข้อมูล + |
| 8 | RXD (service only) | การสื่อสารกับโปรแกรม service |
อินเทอร์เฟซแบบแอบโซลูท TRH / TMH / TSH
ข้อมูลตำแหน่งแบบแอบโซลูทสามารถส่งผ่านอินเทอร์เฟซดิจิทัลแบบสมบูรณ์หรืออินเทอร์เฟซแบบไฮบริด
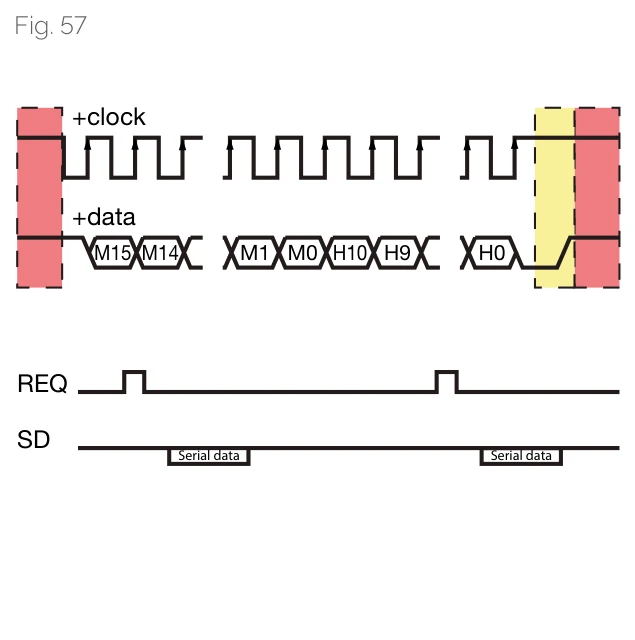
ไดอะแกรม timing อินเทอร์เฟซ TRH/TMH/TSH

ผังขา TRH/TMH/TSH
อินเทอร์เฟซ SSI แบบดิจิทัลสมบูรณ์
ในอินเทอร์เฟซ SSI แบบดิจิทัลสมบูรณ์ ช่องแรก (+clock) ส่งสัญญาณ clock จากตัวรับไปยังระบบวัด ในขณะที่ช่องที่สอง (+data) ส่งค่าตำแหน่งแบบแอบโซลูทจากระบบวัดไปยังวงจรอิเล็กทรอนิกส์ต่อเชื่อมพร้อมกัน
อินเทอร์เฟซแบบ Fanuc Serial
ตัวอย่างอินเทอร์เฟซดิจิทัลสมบูรณ์อีกประเภทคือ "Fanuc Serial Interface" ตัวควบคุมมอเตอร์ส่งเพียงสัญญาณคำขอ (REQ) แทนพัลส์ ระบบวัดคำนวณอัตรา clock ตามนั้น ซึ่งใช้ส่งข้อมูลตำแหน่งและข้อมูลเพิ่มเติม (SD) ไปยังตัวรับ
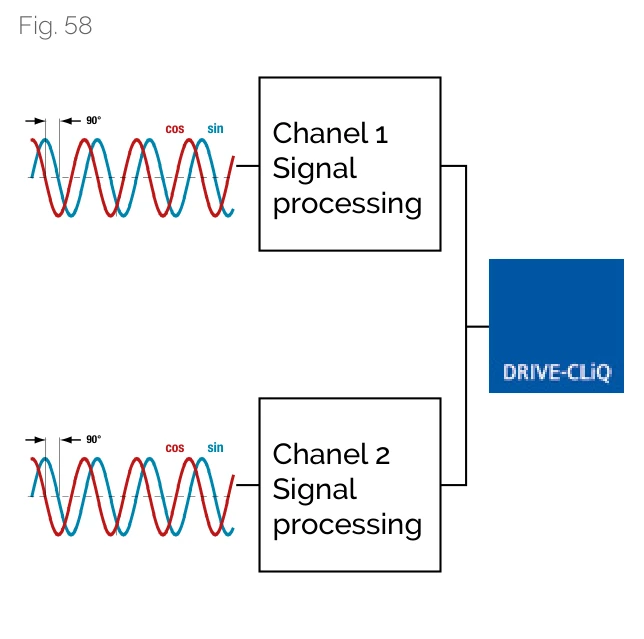
อินเทอร์เฟซไฮบริด SSI+SinCos
อินเทอร์เฟซไฮบริด SSI+SinCos ส่งเฉพาะตำแหน่งเริ่มต้นแบบดิจิทัลแอบโซลูทเมื่อเปิดเครื่อง จากนั้นส่งสัญญาณอินครีเมนทัล 1 Vpp
ความเข้ากันได้ของอินเทอร์เฟซ
- อินเทอร์เฟซ SSI: เชื่อมต่อกับตัวควบคุมเชิงพาณิชย์ที่มีอินเทอร์เฟซ SSI ได้ทุกรุ่น
- อินเทอร์เฟซ Fanuc Serial: ออกแบบเฉพาะสำหรับตัวควบคุม Fanuc
- อินเทอร์เฟซ SSI+SinCos: ออกแบบเฉพาะสำหรับตัวควบคุม Siemens
การกำหนดขา TRH/TMH (อินเทอร์เฟซ SSI / Fanuc / Mitsubishi)
| ขา | สัญญาณ | ประเภทสัญญาณ |
|---|---|---|
| 1 | A+ | สัญญาณ A quasi B / SSI(pos) feedback |
| 2 | NC | - |
| 3 | 0V (sens) | ฟีดแบ็กแรงดันไฟฟ้า |
| 4 | RQ | ใช้ภายใน/บำรุงรักษา |
| 5 | NC | - |
| 6 | +5 to 24V | แรงดันไฟฟ้า |
| 7 | CLK+ | - |
| 8 | CLK- | - |
| 9 | +UB | +Cosine |
| 10 | -UB | -Cosine |
| 11 | +UA | +Sine |
| 12 | -UA | -Sine |
| 13 | A- | แรงดันไฟฟ้า |
| 14 | DATA+ | - |
| 15 | DATA- | - |
| 16 | 0V | Gnd |
| 17 | 0V(+) | - |
อินเทอร์เฟซแอบโซลูท TDC (DRIVE-CLiQ)
ข้อมูลแอบโซลูทจากระบบวัดถูกส่งผ่านอินเทอร์เฟซการสื่อสาร DRIVE-CLiQ ซึ่งเป็นอินเทอร์เฟซอนุกรมแบบเรียลไทม์สำหรับการรับส่งข้อมูลแบบสองทิศทางกับตัวควบคุม Siemens
อินเทอร์เฟซ TDC DRIVE-CLiQ

ผังขา TDC
การเชื่อมต่อระบบวัดเหมาะสำหรับการใช้งานด้านความปลอดภัย และรองรับฟังก์ชัน SAFETY INTEGRATED สำหรับตัวควบคุม Siemens SINAMCS และ SINUMERIK ระบบเป็นไปตามข้อกำหนดความปลอดภัยเชิงฟังก์ชัน IEC 61508-1:2010
DRIVE-CLiQ เป็นเครื่องหมายการค้าจดทะเบียนของ Siemens
การกำหนดขา TDC
| ขา | สัญญาณ | ฟังก์ชัน |
|---|---|---|
| 1 | GN+ | แรงดันไฟฟ้า (บวก) |
| 2 | GND(M) (sensor only) | - |
| 3 | RXD- | รับข้อมูล |
| 4 | RXD+ | - |
| 5 | GND (DC) | แรงดันไฟฟ้า (ลบ) |
| 6 | TXD- (M) (sensor only) | - |
| 7 | TXD+ | ส่งข้อมูล |
| 8 | - | การสื่อสารกับโปรแกรม service |