1.6.1 ความแม่นยำ
ความแม่นยำของรางนำ SCHNEEBERGER MONORAIL ร่วมกับโครงสร้างรองรับ เป็นตัวกำหนดความแม่นยำในการเคลื่อนที่ของระบบทั้งหมด ความแม่นยำของรางนำมีความสำคัญอย่างยิ่งสำหรับการวางตำแหน่งที่แม่นยำและการตัดเฉือนคุณภาพสูง
ความแม่นยำในการเคลื่อนที่เชิงเส้นขึ้นอยู่กับความแม่นยำของฐานเครื่องที่รางนำติดตั้งอยู่ รวมถึงความแม่นยำของรางนำ SCHNEEBERGER MONORAIL เอง ความแม่นยำครอบคลุมทั้งพิกัดความเผื่อมิติ (ค่าเบี่ยงเบนด้านความสูงและความกว้าง) และความแม่นยำในการเคลื่อนที่ (ค่าเบี่ยงเบนขณะแคร่เลื่อนไปตามรางนำ)
1.6.2 ระดับความแม่นยำของรางนำ SCHNEEBERGER MONORAIL
SCHNEEBERGER แบ่งรางนำ MONORAIL ออกเป็นระดับความแม่นยำต่างๆ โดยควบคุมพิกัดความเผื่อมิติด้านความสูงและความกว้างระหว่างรางนำและแคร่เลื่อน
SCHNEEBERGER จำกัดค่าพิกัดความเผื่อของขนาดเหล่านี้ตามข้อกำหนดการผลิตภายใน เพื่อให้มั่นใจถึงความสม่ำเสมอและความน่าเชื่อถือของผลิตภัณฑ์ ระดับความแม่นยำกำหนดพิกัดความเผื่อด้านความสูงและความกว้างของแคร่เลื่อนเทียบกับรางนำ ค่าโดยละเอียดสามารถพบได้ในแคตาล็อก SCHNEEBERGER MONORAIL และ AMS
คำอธิบายระดับความแม่นยำ
SCHNEEBERGER เสนอระดับความแม่นยำหลายระดับเพื่อตอบสนองความต้องการการใช้งานที่แตกต่างกัน รางนำระดับความแม่นยำสูงเหมาะสำหรับเครื่องมือกลที่มีความแม่นยำและอุปกรณ์วัด ในขณะที่ระดับความแม่นยำมาตรฐานเหมาะสำหรับงานอุตสาหกรรมทั่วไป
1.6.3 ความแม่นยำในการเคลื่อนที่
ในอุดมคติ การเคลื่อนที่ของแคร่เลื่อนตามรางนำควรเป็นแนวเส้นตรงอย่างสมบูรณ์ อย่างไรก็ตาม เนื่องจากพิกัดความเผื่อในการผลิต การเคลื่อนที่จริงจะมีค่าเบี่ยงเบนอยู่บ้าง ความแม่นยำในการเคลื่อนที่อธิบายค่าเบี่ยงเบนระหว่างเส้นทางการเคลื่อนที่จริงของแคร่เลื่อนกับแนวเส้นตรงอุดมคติ
ความคลาดเคลื่อนของแคร่เลื่อนเดี่ยว
แคร่เลื่อนเดี่ยวที่เคลื่อนที่ตามรางนำจะเกิดความคลาดเคลื่อน 5 ประเภท ได้แก่ การหมุน 3 แบบและการเลื่อน 2 แบบ:
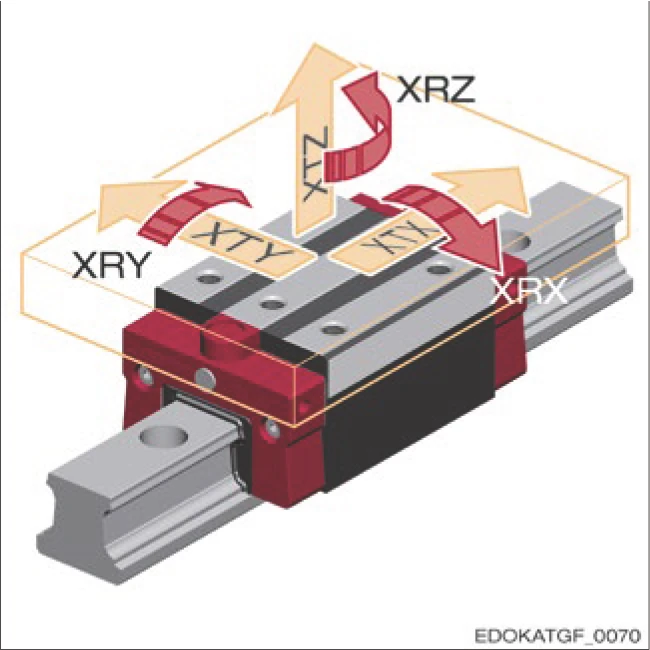
ความคลาดเคลื่อน (5 องศาอิสระ) ของแคร่เลื่อนเดี่ยว
สัญลักษณ์ความคลาดเคลื่อน:
ความคลาดเคลื่อนเชิงหมุน (3 แบบ)
- XRX: หมุนรอบแกน X (แนวการเคลื่อนที่) — Roll
- XRY: หมุนรอบแกน Y — Pitch
- XRZ: หมุนรอบแกน Z — Yaw
ความคลาดเคลื่อนเชิงเลื่อน (2 แบบ)
- XTY: การเลื่อนด้านข้างในทิศทาง Y
- XTZ: การเลื่อนในแนวตั้งในทิศทาง Z
ระบบนิยามตัวย่อ
ตัวอักษรแรก X: ระบุความคลาดเคลื่อนที่เกิดขึ้นระหว่างการเคลื่อนที่ตามแกน X (ทิศทางการเคลื่อนที่)
ตัวอักษรที่สอง R/T: R = การหมุน (Rotation); T = การเลื่อน (Translation)
ตัวอักษรที่สาม X/Y/Z: ระบุแกนการหมุนหรือทิศทางการเลื่อน
ผลของความคลาดเคลื่อน
เมื่อพิจารณาแกนเครื่องเป็นตัวอย่าง พฤติกรรมทางเรขาคณิตถูกกำหนดโดยความคลาดเคลื่อนของแคร่เลื่อนแต่ละตัว เมื่อต่อแกนหลายแกนเข้าด้วยกัน ความคลาดเคลื่อนจะมีอิทธิพลต่อกัน ดังนั้นจึงสำคัญมากที่จะต้องรักษาความแปรปรวนของแต่ละแคร่เลื่อนให้น้อยที่สุดเท่าที่เป็นไปได้ในระบบ
การเคลื่อนที่ของแคร่เลื่อนหลายตัวที่ต่อกัน
ในทางปฏิบัติ มักใช้การตั้งค่าที่มีแคร่เลื่อน 4 ตัวบนรางนำ 2 ราง เมื่อแคร่เลื่อนต่อกันผ่านอานหรือโต๊ะงาน การเคลื่อนที่เชิงหมุนของแคร่เลื่อนแต่ละตัวจะถูกยับยั้ง และระบบโดยรวมจะแสดงเฉพาะการเคลื่อนที่เชิงเลื่อน
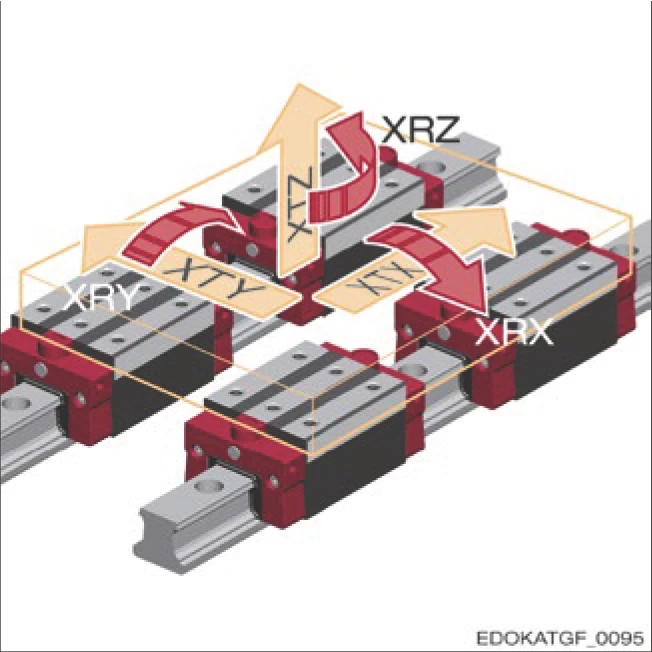
แคร่เลื่อน 4 ตัวที่ต่อกัน แสดงการเคลื่อนที่ XRX, XRY และ XRZ
ในระบบโดยรวม การเคลื่อนที่เชิงหมุน XRX, XRY และ XRZ ของแคร่เลื่อนแต่ละตัวจะไม่ปรากฏอีกต่อไป การเคลื่อนที่โดยรวมเป็นผลรวมของการเคลื่อนที่ย่อยแต่ละส่วน ระบบแคร่เลื่อนที่ต่อกันยังคงเหลือเฉพาะองศาอิสระเชิงเลื่อน:
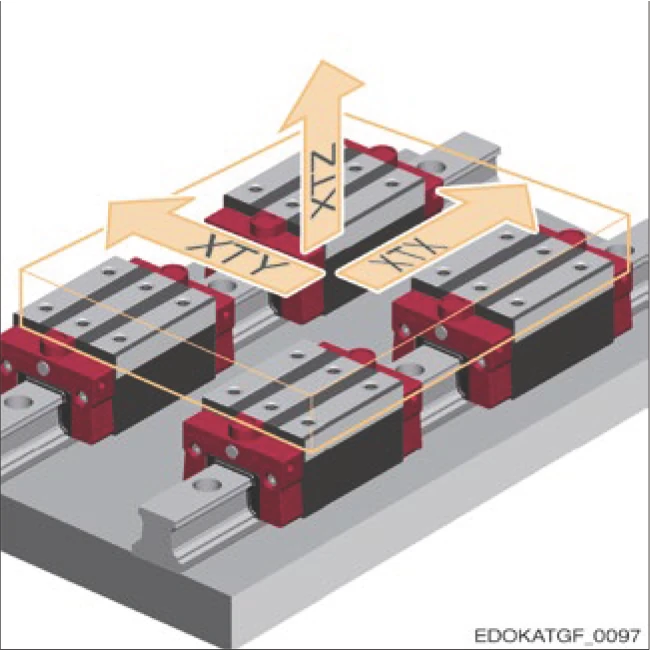
แคร่เลื่อน 4 ตัวที่ต่อกัน แสดงเฉพาะการเคลื่อนที่เชิงเลื่อน XTX, XTY และ XTZ
คุณสมบัติการเคลื่อนที่ของแคร่เลื่อนที่ต่อกัน
เมื่อแคร่เลื่อนหลายตัวต่อกันอย่างแข็งแรง องศาอิสระเชิงหมุนของแคร่เลื่อนแต่ละตัวจะถูกจำกัด และระบบโดยรวมจะแสดงเฉพาะทิศทางการเคลื่อนที่เชิงเลื่อน 3 ทิศทาง (XTX, XTY, XTZ) นี่คือเหตุผลที่เครื่องมือกลที่มีความแม่นยำมักใช้การตั้งค่า 4 แคร่, 2 รางนำ
1.6.4 ปัจจัยที่ส่งผลต่อความแม่นยำในการเคลื่อนที่
ความแม่นยำในการเคลื่อนที่ของรางนำ SCHNEEBERGER MONORAIL ได้รับผลกระทบไม่เพียงจากความแม่นยำในการผลิตของชิ้นส่วนกลิ้ง แต่ยังจากปัจจัยต่อไปนี้ ซึ่งสามารถแบ่งเป็น 3 ประเภทตามระยะอิทธิพล:
ความแปรปรวนระยะไกล
ปัจจัยที่ส่งผลต่อระยะชักทั้งหมด
- ความคลาดเคลื่อนทางเรขาคณิตของร่องทางวิ่งรางนำ (ความตรง, ความขนาน)
- ความคลาดเคลื่อนทางเรขาคณิตของพื้นผิวรองรับฐานเครื่อง
- ความแข็งแกร่งและความแม่นยำของโครงสร้างรอบข้าง
ความแปรปรวนระยะกลาง
ความแปรปรวนเป็นคาบ มีคาบเท่ากับระยะพิตช์สกรู
- การเสียรูปเฉพาะที่ของรางนำจากแรงสกรู
- พิกัดความเผื่อตำแหน่งของรูรางนำ
- ความไม่สม่ำเสมอของแรงบิดขันสกรู
ความแปรปรวนระยะสั้น
ความแปรปรวนเป็นคาบความถี่สูง
- การสั่นของการเดินทาง (การสัมผัสเป็นคาบของชิ้นส่วนกลิ้ง)
- จุดเปลี่ยนผ่านของรางนำหลายท่อน
- ความแตกต่างเล็กน้อยในเส้นผ่านศูนย์กลางของชิ้นส่วนกลิ้ง
ความคลาดเคลื่อนทางเรขาคณิตของโครงสร้างเชื่อมต่อ
เพื่อให้ได้การนำที่มีความแม่นยำสูง พื้นผิวรองรับของโครงสร้างเชื่อมต่อต้องมีความแม่นยำสูงด้วย ความคลาดเคลื่อนทางเรขาคณิตเพิ่มเติมมาจากความแม่นยำและความแข็งแกร่งของเครื่อง รวมถึงอิทธิพลของโครงสร้างรอบข้างทั้งหมด ความแม่นยำในการเคลื่อนที่ของรางนำท้ายที่สุดขึ้นอยู่กับผลรวมของความแม่นยำของรางนำเองและความแม่นยำของพื้นผิวรองรับ
ผลของแรงสกรู
แรงสกรูระหว่างการติดตั้งรางนำทำให้เกิดการอัดและการเสียรูปเฉพาะที่ ปัจจัยต่อไปนี้ส่งผลต่อการเสียรูปนี้:
- ขนาดของแรงบิดขันสกรู
- สภาพการหล่อลื่นของหัวสกรู (ส่งผลต่อแรงเสียดทานของหัวสกรู)
- ความราบของพื้นผิวรองรับ
- สภาพการสัมผัสระหว่างรางนำและพื้นผิวรองรับ
1.6.5 การสั่นของการเดินทาง (Travel Pulsation)
การสั่นของการเดินทางหมายถึงการเคลื่อนที่เป็นคาบเล็กๆ น้อยๆ ในทิศทาง XTY (ด้านข้าง) และ XTZ (แนวตั้ง) ที่เกิดขึ้นขณะแคร่เลื่อนเคลื่อนที่ตามรางนำ สาเหตุคือการสัมผัสเป็นคาบขณะชิ้นส่วนกลิ้งเข้าและออกจากโซนรับภาระ
สาเหตุของการสั่นของการเดินทาง
การสั่นของการเดินทางเกิดจากปัจจัยหลักดังนี้:
- แรงกระแทกขณะชิ้นส่วนกลิ้งเข้าสู่โซนรับภาระ
- การปลดปล่อยขณะชิ้นส่วนกลิ้งออกจากโซนรับภาระ
- ความแตกต่างเล็กน้อยในเส้นผ่านศูนย์กลางของชิ้นส่วนกลิ้ง
- การเสียรูปแบบยืดหยุ่นที่จุดสัมผัสของชิ้นส่วนกลิ้งและร่างทางวิ่ง
ปัจจัยที่ส่งผลต่อการสั่นของการเดินทาง
แอมพลิจูดของการสั่นของการเดินทางสามารถควบคุมได้ด้วยพารามิเตอร์ต่อไปนี้:
ความยาวแคร่เลื่อน L
แคร่เลื่อนที่ยาวกว่ามีชิ้นส่วนกลิ้งรับภาระพร้อมกันมากกว่า ซึ่งช่วยเฉลี่ยอิทธิพลของชิ้นส่วนกลิ้งแต่ละตัว จึงลดการสั่นของการเดินทางได้
ระดับแรงดึงล่วงหน้า V
แรงดึงล่วงหน้าที่ต่ำกว่าช่วยลดแรงกระแทกขณะชิ้นส่วนกลิ้งเข้าสู่โซนรับภาระ จึงลดแอมพลิจูดของการสั่นของการเดินทาง
คำแนะนำในการออกแบบ
แคร่เลื่อนที่ยาวกว่าและแรงดึงล่วงหน้า V ที่ต่ำกว่าสามารถลดการสั่นของการเดินทางได้
หมายเหตุ: แรงดึงล่วงหน้าที่ต่ำกว่าจะลดความแข็งแกร่งของระบบ จำเป็นต้องสร้างสมดุลระหว่างความแม่นยำและความแข็งแกร่ง
SCHNEEBERGER ให้ความสำคัญเป็นพิเศษกับการออกแบบหน่วยหมุนเวียนชิ้นส่วนกลิ้งและโซนทางเข้า โดยการปรับแต่งรูปทรงของพื้นที่เหล่านี้ ชิ้นส่วนกลิ้งสามารถเข้าและออกจากโซนรับภาระได้อย่างราบรื่น จึงลดการสั่นของการเดินทางให้น้อยที่สุด
1.6.6 มาตรการเพื่อปรับปรุงความแม่นยำ
รายการต่อไปนี้แสดงภาพรวมของมาตรการที่สามารถใช้เพื่อปรับปรุงความแม่นยำในการเคลื่อนที่ ครอบคลุมการออกแบบเครื่อง การเลือกรางนำ และวิธีการติดตั้ง:
การออกแบบเครื่อง
- ใช้โครงสร้างเครื่องที่แข็งแกร่งที่สุดเท่าที่เป็นไปได้
- กลึงละเอียดพื้นผิวรองรับรางนำ
- ใช้ระยะห่างรางนำและระยะห่างแคร่เลื่อนที่มากขึ้น
การเลือกรางนำ
- เลือกรางนำระดับความแม่นยำสูง
- เลือกคู่รางนำที่มีพฤติกรรมการเคลื่อนที่คล้ายกัน (ระบบจับคู่ ดูหัวข้อ 4.6)
- ใช้แคร่เลื่อนที่ยาวกว่าเพื่อลดการสั่นของการเดินทาง
การตั้งค่าการติดตั้ง
- ติดตั้งรางนำด้วยตำแหน่งอ้างอิงด้านข้างเพียงด้านเดียว
- เลือกระยะพิตช์รูรางนำที่เล็กลง
- ใช้การตั้งค่า 2 ราง พร้อมแคร่เลื่อนอย่างน้อย 2 ตัวต่อราง
การขันสกรู
- ลดแรงบิดขันสกรู (ขณะยังคงรับประกันความสามารถรับภาระเพียงพอ)
- รักษาแรงบิดขันสกรูให้สม่ำเสมอ
- หล่อลื่นหัวสกรูอย่างเหมาะสมเพื่อลดแรงเสียดทาน
คำอธิบายระบบจับคู่
SCHNEEBERGER เสนอระบบจับคู่ที่ช่วยให้เลือกชุดรางนำและแคร่เลื่อนที่มีคุณสมบัติพฤติกรรมการเคลื่อนที่คล้ายกัน รางนำที่จับคู่กันใช้ในระบบเดียวกันสามารถลดความคลาดเคลื่อนในการเคลื่อนที่ได้มากขึ้น สำหรับข้อมูลโดยละเอียด โปรดดูหัวข้อ 4.6 - ความแม่นยำ