บทที่ 5: การใช้งานครั้งแรก
5.1 การส่งสัญญาณ
เพื่อเพิ่มภูมิต้านทานต่อสัญญาณรบกวน แนะนำให้ใช้สัญญาณแบบดิฟเฟอเรนเชียลตามมาตรฐาน RS-422 การส่งสัญญาณแบบสมดุลด้วยเฟสสัญญาณตรงข้ามสามารถป้องกันสัญญาณรบกวนได้เกือบทั้งหมด คอนโทรลเลอร์ไดรฟ์ที่ทันสมัยเกือบทุกรุ่นรองรับตัวเลือกนี้
ใช้สายคู่บิดเกลียวในการส่งสัญญาณ (A+, B+, R+) และสัญญาณอินเวิร์สที่สอดคล้องกัน (A-, B-, R-) ที่ตัวรับสัญญาณ สัญญาณจะถูกสร้างขึ้นโดยนำความต่างระหว่างสองระดับสัญญาณ
ในการส่งสัญญาณแบบ single-ended ระดับสัญญาณจะเปลี่ยนแปลงเทียบกับศักย์อ้างอิง การส่งสัญญาณประเภทนี้ไวต่อสัญญาณรบกวนมากกว่า แอมพลิจูดสัญญาณในกรณีนี้เป็นครึ่งหนึ่งของสัญญาณที่ส่งแบบดิฟเฟอเรนเชียล
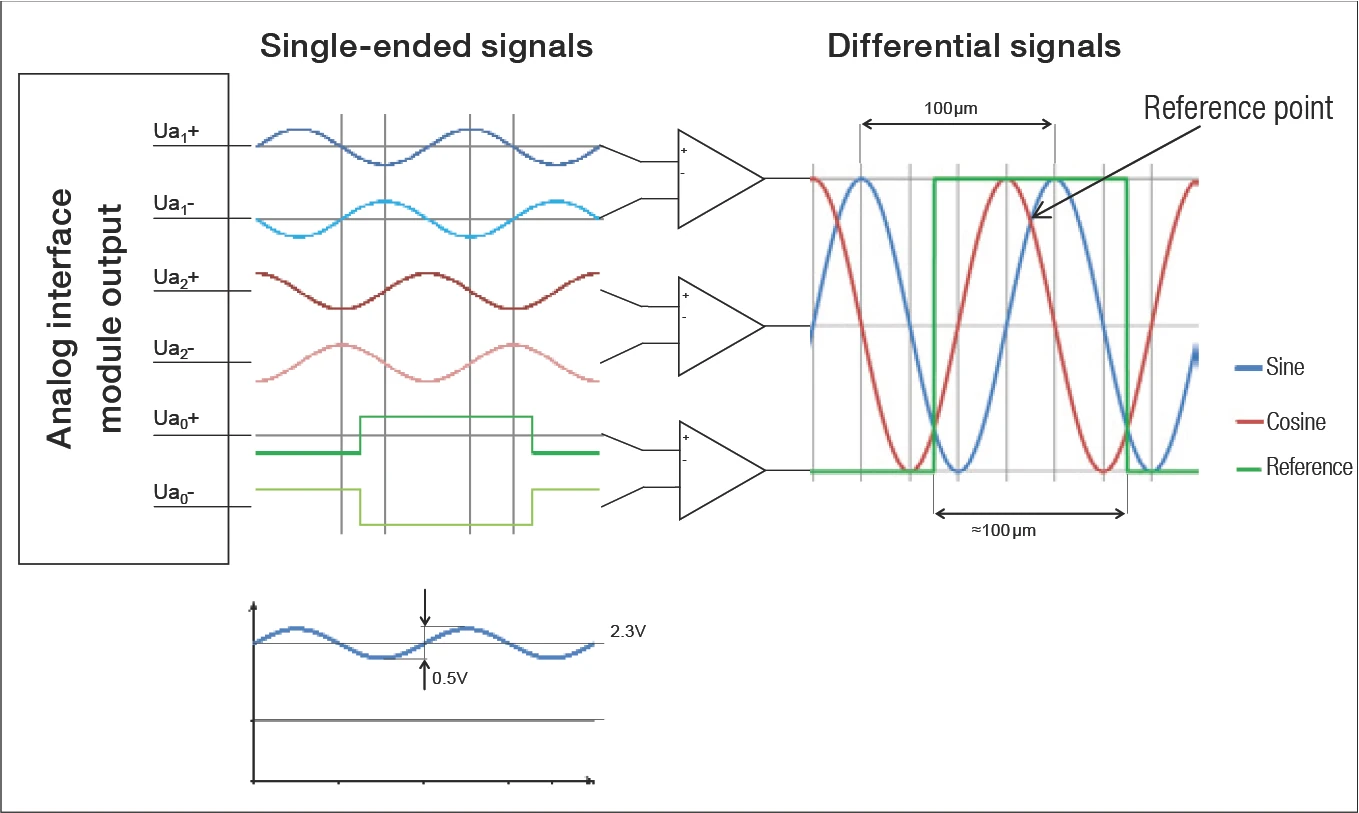
สัญญาณเอาต์พุตแบบอะนาล็อกที่โมดูลอินเทอร์เฟซ สามารถใช้แบบ single-ended (อ้างอิงกับกราวด์) หรือแบบดิฟเฟอเรนเชียล
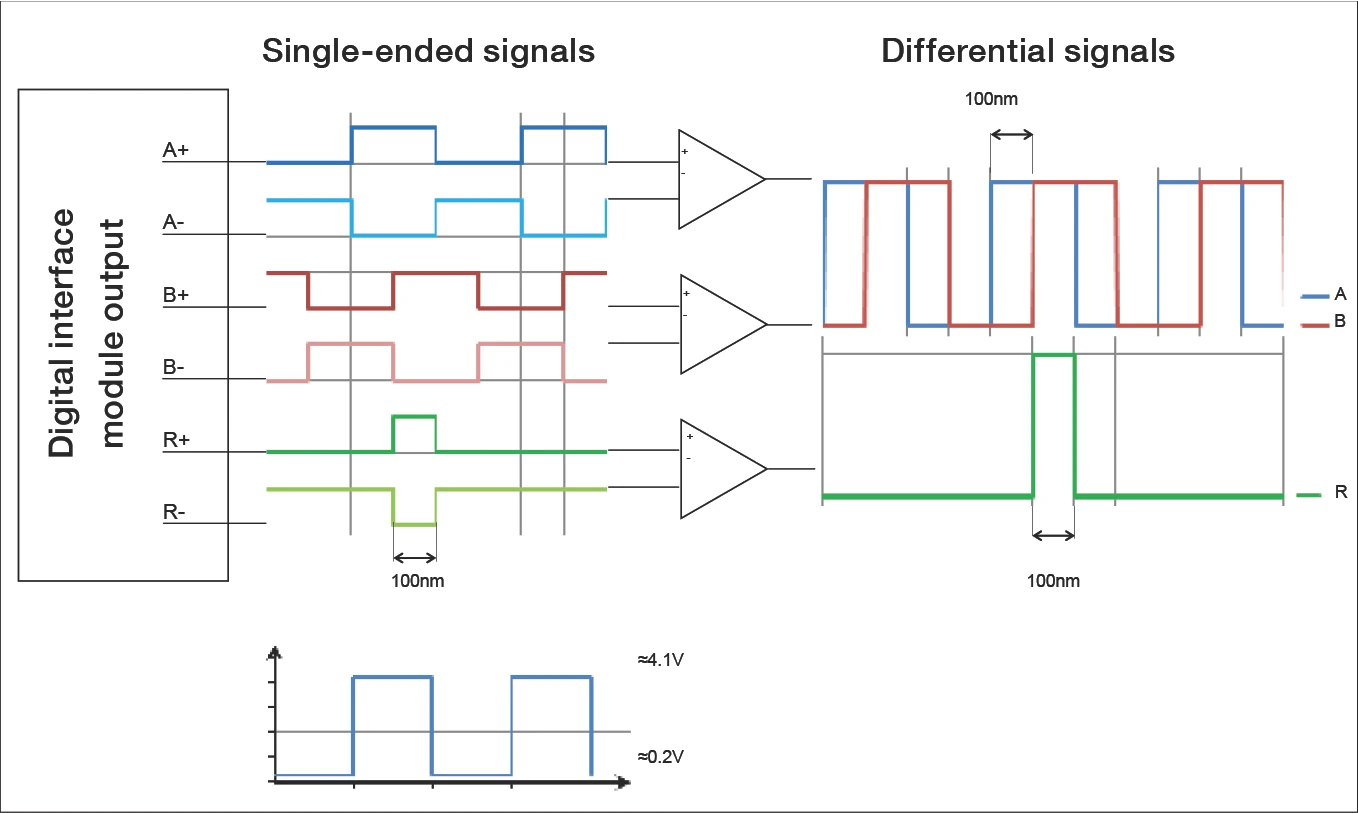
สัญญาณเอาต์พุตแบบดิจิทัลที่โมดูลอินเทอร์เฟซ สามารถใช้แบบ single-ended (อ้างอิงกับกราวด์) หรือแบบดิฟเฟอเรนเชียล
ตัวต้านทานสิ้นสุดบัส RS-422 ควรเป็น 120 โอห์ม
5.2 การกำหนดขา
5.2.1 โมดูลอินเทอร์เฟซแบบอะนาล็อกและดิจิทัล
ขั้วต่อ D-Sub 9 พินแบบตัวผู้ หรือหน้าสัมผัสบัดกรี:
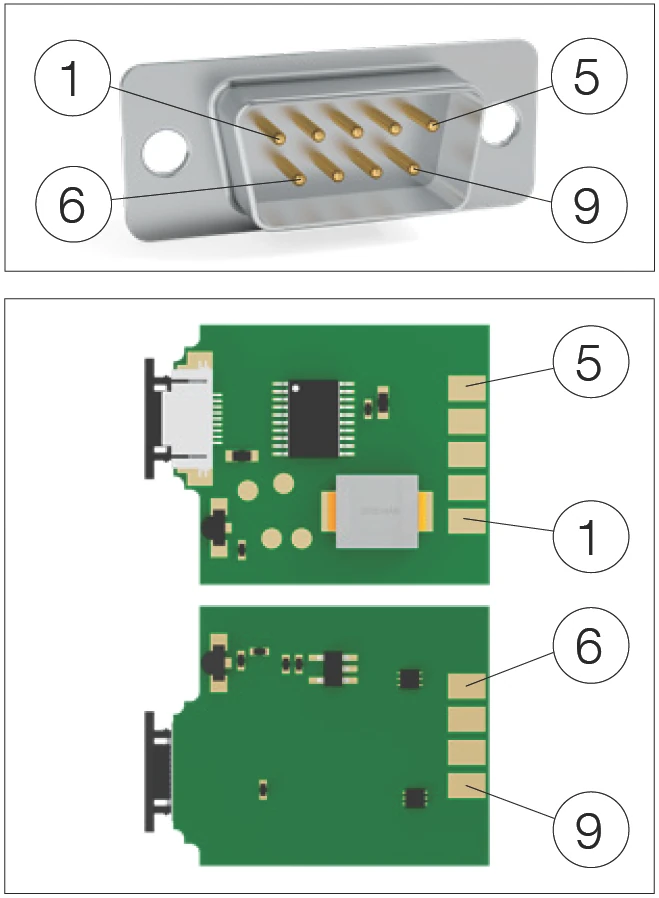
ผังขาขั้วต่อ D-Sub 9
| ขา | สัญญาณอะนาล็อก | สัญญาณดิจิทัล | คำอธิบาย |
|---|---|---|---|
| 1 | Ua1- | A - | สัญญาณ Quadrature |
| 2 | 0V | 0V | กราวด์ |
| 3 | Ua2- | B - | สัญญาณ Quadrature |
| 4 | ERR NOT | ERR NOT | สัญญาณข้อผิดพลาด (Low = ข้อผิดพลาด) |
| 5 | Ua0 - | R - | สัญญาณอ้างอิง |
| 6 | Ua1 + | A + | สัญญาณ Quadrature |
| 7 | + 5V DC | + 5V DC | แรงดันไฟเลี้ยง |
| 8 | Ua2 + | B + | สัญญาณ Quadrature |
| 9 | Ua0 + | R + | สัญญาณอ้างอิง |
ภาพที่ 1: การเชื่อมต่อขาของขั้วต่อ D-Sub 9 ที่โมดูลอินเทอร์เฟซ
ภาพที่ 2: การเชื่อมต่อขาที่โมดูลอินเทอร์เฟซแบบหน้าสัมผัสบัดกรี
ขั้วต่อ Micro Match 10 พินแบบตัวผู้:
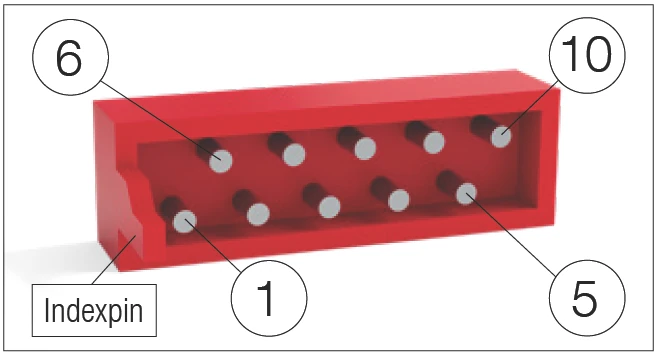
การเชื่อมต่อขาของขั้วต่อ Micro Match ที่โมดูลอินเทอร์เฟซ
| ขา | สัญญาณอะนาล็อก | สัญญาณดิจิทัล | คำอธิบาย |
|---|---|---|---|
| 1 | nc | nc | |
| 2 | Ua1 + | A + | สัญญาณ Quadrature |
| 3 | + 5V DC | + 5V DC | แรงดันไฟเลี้ยง |
| 4 | Ua2 + | B + | สัญญาณ Quadrature |
| 5 | Ua0 + | R + | สัญญาณอ้างอิง |
| 6 | Ua1 - | A - | สัญญาณ Quadrature |
| 7 | 0V | 0V | กราวด์ |
| 8 | Ua2 - | B - | สัญญาณ Quadrature |
| 9 | ERR NOT | ERR NOT | สัญญาณข้อผิดพลาด (Low = ข้อผิดพลาด) |
| 10 | Ua0 - | R - | สัญญาณอ้างอิง |
5.2.2 สายเซ็นเซอร์แบบยืดหยุ่น (Sensor Print)
หมายเหตุ: ข้อมูลนี้เกี่ยวข้องเฉพาะกับลูกค้าที่ประมวลผลสัญญาณดิบโดยตรงและไม่ใช้โมดูลอินเทอร์เฟซที่มีให้
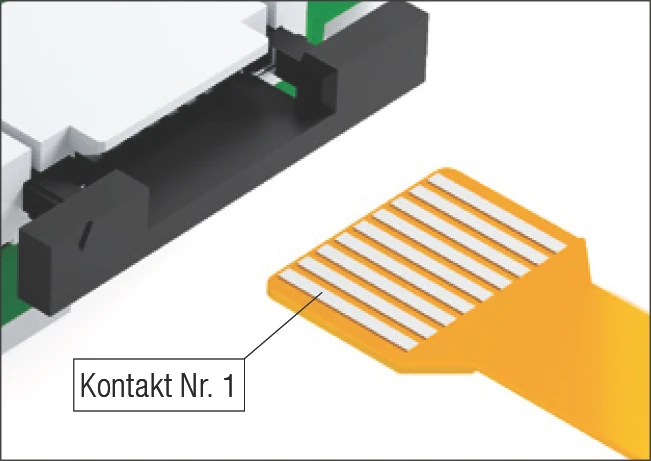
การเชื่อมต่อขาของสายเซ็นเซอร์แบบยืดหยุ่น
| ขา | สัญญาณ | คำอธิบาย |
|---|---|---|
| 1 | PZ | สัญญาณดิบอ้างอิง |
| 2 | GND | กราวด์ |
| 3 | NZ | สัญญาณดิบอ้างอิง |
| 4 | +5V DC | แรงดันไฟเลี้ยง |
| 5 | Diode | ไฟเลี้ยงแสงสว่าง |
| 6 | PSIN | สัญญาณดิบไซน์ |
| 7 | NSIN | สัญญาณดิบไซน์ |
| 8 | PCOS | สัญญาณดิบโคไซน์ |
| 9 | NCOS | สัญญาณดิบโคไซน์ |
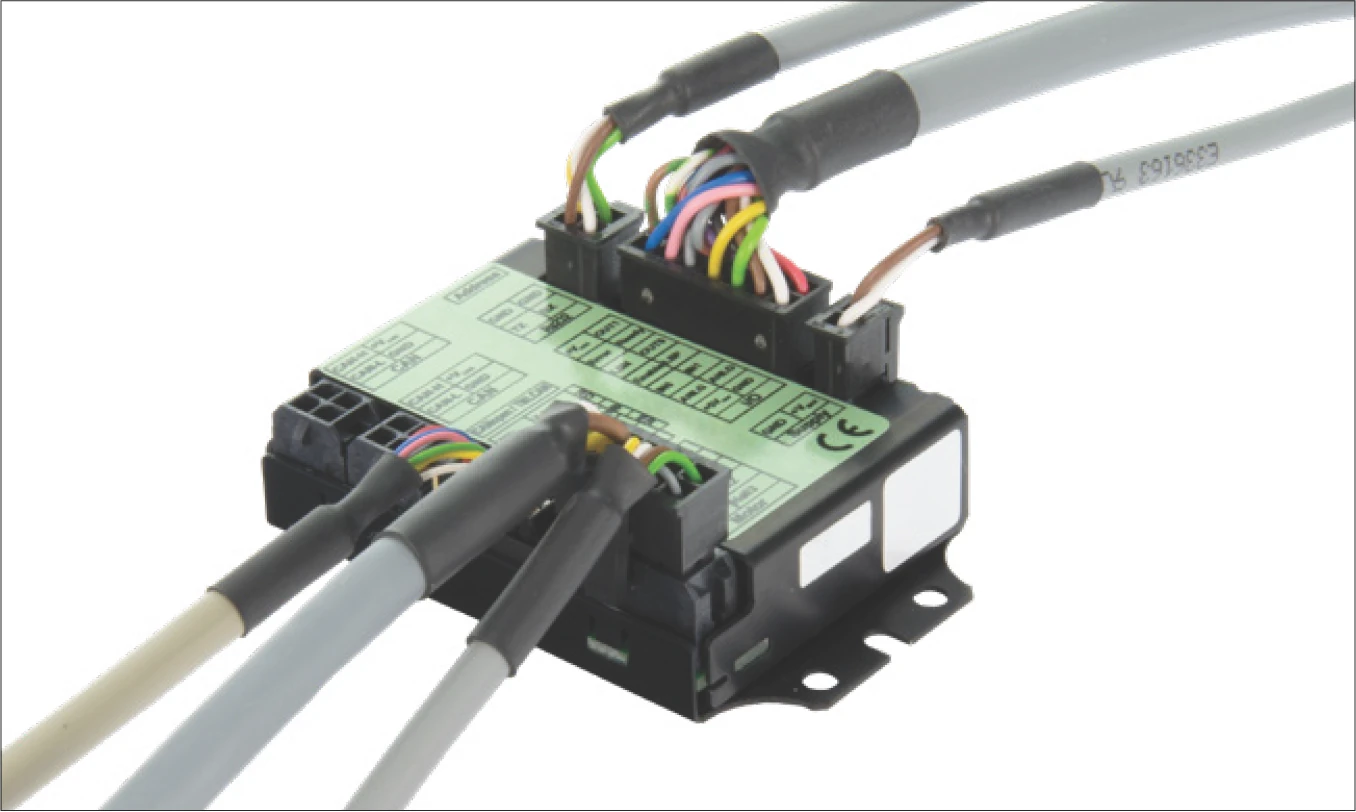
5.3 คอนโทรลเลอร์
MINISLIDE MSQscale ใช้ได้กับคอนโทรลเลอร์ทุกประเภทที่มีพอร์ตเอ็นโค้ดเดอร์แบบอินครีเมนทัลสำหรับสัญญาณ 1 Vpp (อะนาล็อกไซน์/โคไซน์) หรือพอร์ต RS-422 (ดิจิทัล TTL) MINISLIDE MSQscale สามารถเชื่อมต่อกับอินพุตเอ็นโค้ดเดอร์ RS-422 หรือ RS-485
โมดูลที่เหมาะสมมีจำหน่ายจากผู้ผลิตคอนโทรลเลอร์ชั้นนำ ได้แก่ Siemens, Beckhoff, ACS เป็นต้น
สำหรับการใช้งานขั้นพื้นฐาน สามารถใช้ USB counter (เช่น จาก Heilig & Schwab; ดูแค็ตตาล็อกผลิตภัณฑ์หัวข้อ 5.2) เพื่อเชื่อมต่อ MINISLIDE MSQscale โดยตรงกับ PC
ต้องพิจารณาความถี่อินพุตสูงสุดเมื่อเลือกคอนโทรลเลอร์ ความถี่สูงถึง 8 MHz อาจเกิดขึ้นขึ้นอยู่กับความเร็วในการเคลื่อนที่และความละเอียด ดูหัวข้อ 6.4 สำหรับตัวอย่างการคำนวณ
คอนโทรลเลอร์พร้อมพอร์ตเอ็นโค้ดเดอร์สำหรับสัญญาณ 1 Vpp หรือสัญญาณ Quadrature
5.3.1 การตั้งค่า
สำหรับสัญญาณอะนาล็อก
สัญญาณอะนาล็อกต้องผ่านการอินเทอร์โพเลตในอุปกรณ์ที่ลูกค้าจัดหาเพื่อให้ได้ความละเอียดที่ต้องการ คาบสัญญาณสอดคล้องกับระยะทาง 100 µm
ตัวอย่าง: คาบสัญญาณ 100 µm การอินเทอร์โพเลต 250 เท่าและการประเมิน 4 ขอบ ได้ความละเอียด 0.1 µm
สำหรับสัญญาณดิจิทัล
ขนาดก้าวในคอนโทรลเลอร์ไดรฟ์ต้องตั้งค่าตามความละเอียดที่เลือกและประเภทของการประเมินขอบ
ความละเอียดมาตรฐานของ MINISLIDE MSQscale คือ 0.1 µm สามารถสั่งซื้อความละเอียด 1 µm หรือ 10 µm เป็นตัวเลือก
คอนโทรลเลอร์ส่วนใหญ่อนุญาตให้เลือกประเภทการประเมินขอบ ตัวเลือกคือ การประเมิน 4 ขอบ 2 ขอบ และ 1 ขอบ (ดูหัวข้อ 6.3)
5.4 การตรวจสอบฟังก์ชัน
ไฟ LED สีเขียวจะติดสว่างหาก MINISLIDE MSQscale ได้รับไฟเลี้ยงอย่างถูกต้อง
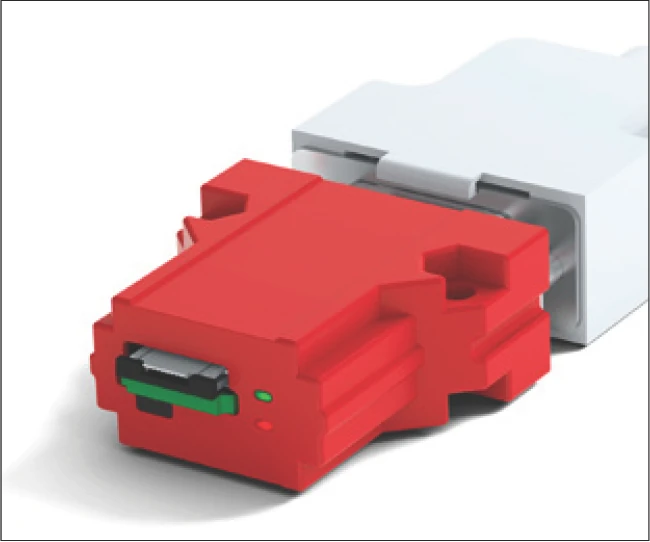
โมดูลอินเทอร์เฟซโดยไม่มีสายเซ็นเซอร์แบบยืดหยุ่น MINISLIDE MSQscale ทั้ง LED สีเขียวและสีแดงจะติดสว่าง
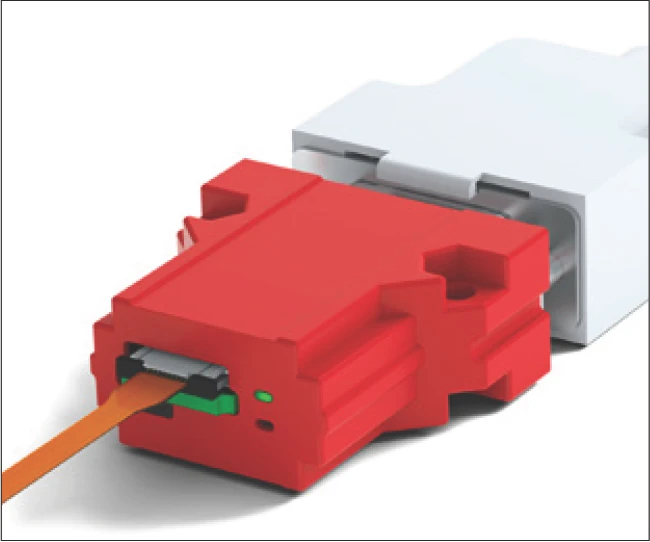
โมดูลอินเทอร์เฟซพร้อมสายเซ็นเซอร์แบบยืดหยุ่น MINISLIDE MSQscale ที่เชื่อมต่ออย่างถูกต้อง LED สีเขียวจะติดสว่าง
หากแคร่เลื่อนอยู่บนรางนำและ LED ติดสีแดงแม้จะเสียบสายเซ็นเซอร์แล้ว ให้ค้นหาข้อผิดพลาดโดยใช้ตารางในบทที่ 9.2 "คำอธิบายข้อผิดพลาด"
| LED | ไม่มีไฟเลี้ยง | เชื่อมต่อไฟเลี้ยง การทำงานปกติ | สภาวะข้อผิดพลาด |
|---|---|---|---|
| สีแดง | ไม่ติด | ไม่ติด | ติดสีแดง |
| สีเขียว | ไม่ติด | ติดสีเขียว | ติดสีเขียว |
สถานะของโมดูลอินเทอร์เฟซแสดงทางอิเล็กทรอนิกส์ด้วยเอาต์พุต ("ERR NOT") ERR NOT เป็นเอาต์พุต 5 โวลต์ (ระดับ TTL) โดย "สัญญาณ low" = "มีข้อผิดพลาด" และ "สัญญาณ high" = "ไม่มีข้อผิดพลาด"
สัญญาณข้อผิดพลาดควรเชื่อมต่อกับอินพุตที่มีอิมพีแดนซ์สูง หากอิมพีแดนซ์อินพุตต่ำเกินไป กระแสจะไหลผ่าน LED สีแดงและทำให้ติดสว่าง
บทที่ 6: หลักการทางเทคนิค
6.1 ความแม่นยำของระบบ
6.1.1 ความแม่นยำของระบบ
ความแม่นยำของระบบประกอบด้วยค่าเบี่ยงเบนคลื่นยาว (ความเป็นเส้นตรงของสเกลมิติ) และค่าเบี่ยงเบนคลื่นสั้น (เช่น ความแม่นยำในการอินเทอร์โพเลต) ของระบบสแกน (เซ็นเซอร์และโมดูลอินเทอร์เฟซ) ค่าความแม่นยำอ้างอิงที่อุณหภูมิห้อง 20°C
ค่าเบี่ยงเบนคลื่นยาว
ความเป็นเส้นตรงของสเกลมิติหมายถึงความยาวรางทั้งหมด ที่ความยาวนี้ ค่าเบี่ยงเบนของสเกลมิติจะน้อยกว่า ±3 µm เสมอที่สเกลในอุดมคติ
ค่าเบี่ยงเบนคลื่นสั้น
ระบบวัดระยะทางแบบอินครีเมนทัลทุกระบบได้รับอิทธิพลจากผลของการเบี่ยงเบนเป็นคาบ การเบี่ยงเบนเป็นคาบนี้ เรียกอีกอย่างว่าค่าเบี่ยงเบนคลื่นสั้น เกิดขึ้นเนื่องจากความเบี่ยงเบนเล็กน้อยในระบบเซ็นเซอร์หรือการประมวลผลสัญญาณไฟฟ้า ซึ่งหมายความว่าสัญญาณไซน์และโคไซน์เบี่ยงเบนจากรูปแบบทางคณิตศาสตร์ที่แน่นอน หากการเบี่ยงเบนเป็นคาบเกิดขึ้นเฉพาะระหว่างการดิจิไทซ์และการคำนวณตำแหน่ง เรียกว่าข้อผิดพลาดการอินเทอร์โพเลต
ค่าเบี่ยงเบนคลื่นสั้นของ MINISLIDE MSQscale อยู่ในช่วง ±0.6 µm เสมอ
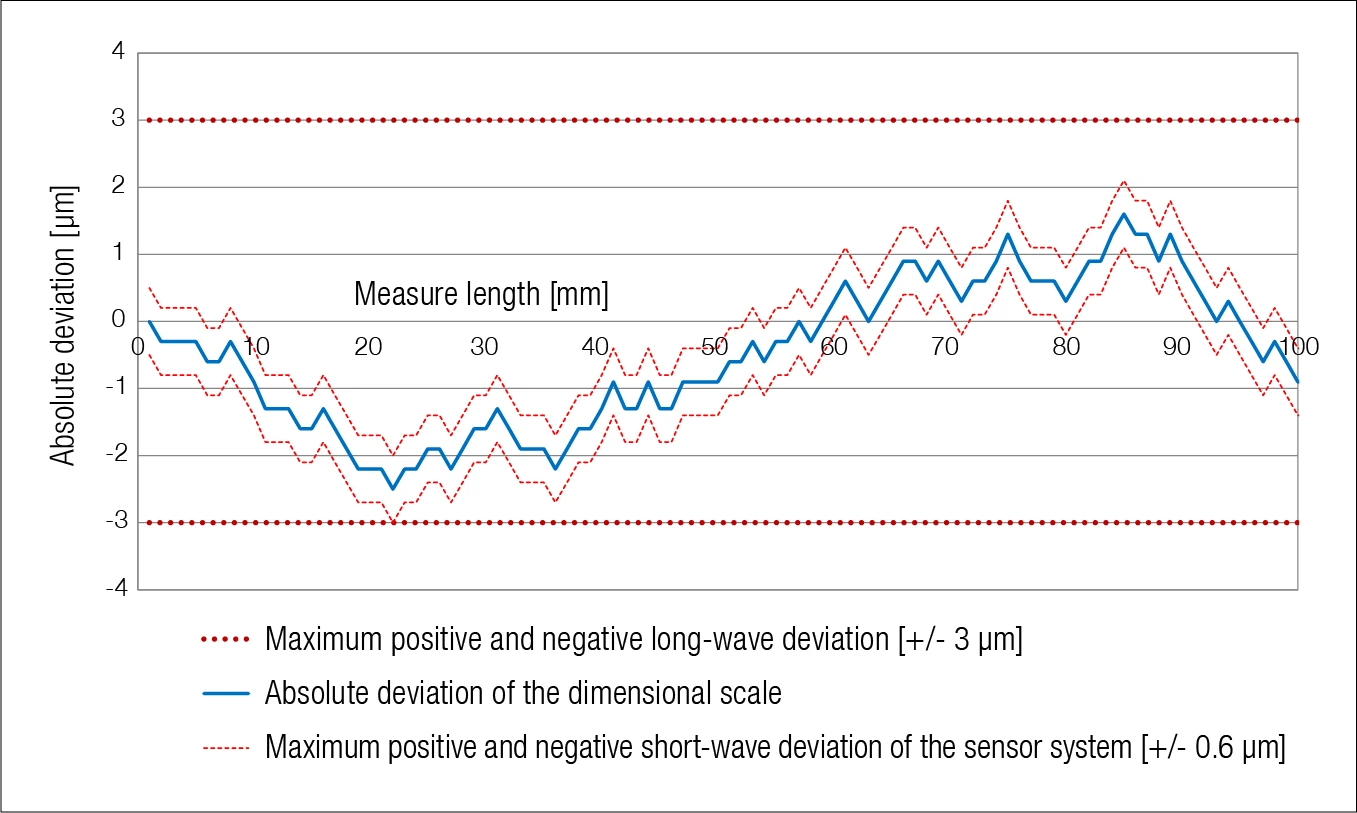
ความแม่นยำของระบบถูกกำหนดโดยค่าเบี่ยงเบนคลื่นยาวและค่าเบี่ยงเบนคลื่นสั้น
ความเป็นเส้นตรงของสเกลมิติถูกบันทึกสำหรับแต่ละระบบและสามารถให้กับลูกค้าตามคำขอ บันทึกนี้อ้างอิงกับรางนำเฉพาะ (ดูหมายเลขราง)
6.2 การอินเทอร์โพเลต
สำหรับการใช้งานวัดระยะทาง การอินเทอร์โพเลตหมายถึงการแปลงสัญญาณอะนาล็อกอินพุตเป็นสัญญาณดิจิทัลเอาต์พุตที่มีคาบสัญญาณเล็กกว่า สิ่งนี้จำเป็นเนื่องจากไม่สามารถสร้างค่าการนับและ/หรือค่าตำแหน่งได้โดยตรงจากสัญญาณอะนาล็อก
ตัวประกอบการอินเทอร์โพเลตกำหนดอัตราส่วนของคาบสัญญาณจากสัญญาณอินพุตอะนาล็อกต่อสัญญาณเอาต์พุตดิจิทัล
เอาต์พุตของกระบวนการอินเทอร์โพเลตคือสัญญาณ Quadrature ซึ่งหมายถึงรูปคลื่นพัลส์สองรูปที่มีเฟสออฟเซต 90° ความละเอียดถูกกำหนดโดยระยะห่างระหว่างสองขอบของสัญญาณ Quadrature
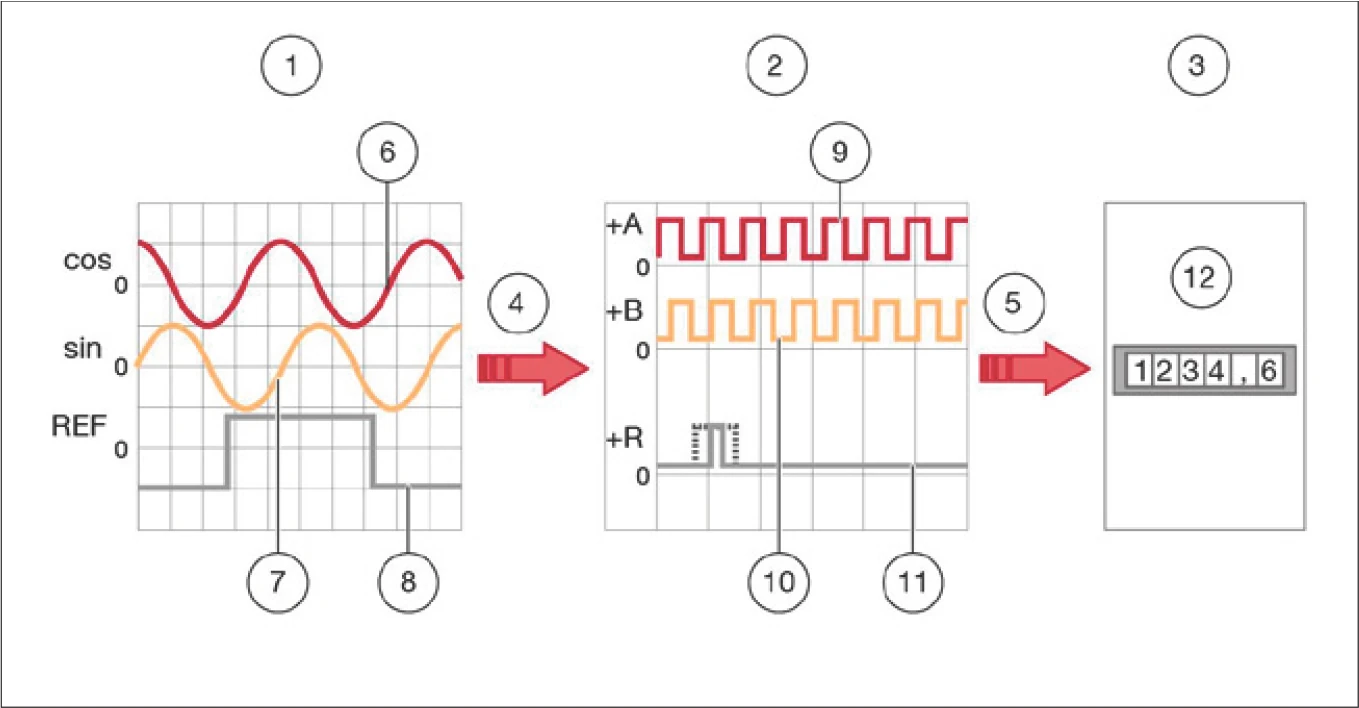
สัญญาณอินพุตอะนาล็อก (sin, cos, REF) ถูกอินเทอร์โพเลต (ลูกศรสีแดง) เป็นสัญญาณเอาต์พุตดิจิทัล (+A, +B, +R)
6.3 การประเมินสัญญาณดิจิทัล
สัญญาณดิจิทัล ประกอบด้วยสัญญาณอินครีเมนทัล A และ B สองสัญญาณ และสัญญาณอ้างอิง R ถูกส่งไปยังอิเล็กทรอนิกส์ดาวน์สตรีม ซึ่งอาจเป็นจอแสดงผลขั้นพื้นฐาน, PC หรือคอนโทรลเลอร์เครื่องจักร
อิเล็กทรอนิกส์ดาวน์สตรีมกำหนดค่าตำแหน่งจากสัญญาณดิจิทัลโดยการนับขอบสัญญาณ ทิศทางการนับกำหนดจากความสัมพันธ์เฟสของสัญญาณ A และ B ขึ้นอยู่กับจำนวนขอบที่ถูกประเมิน เรียกว่า:
1. การประเมินขอบเดียว (Single edge)
นับขอบเดียวต่อช่องสัญญาณ ดังนั้นหนึ่งขั้นการวัดจะสอดคล้องกับหนึ่งคาบสัญญาณดิจิทัล
2. การประเมินสองขอบ (Two-edge)
นับทั้งขอบขึ้นและขอบลงของช่องสัญญาณ ดังนั้นหนึ่งขั้นการวัดจะสอดคล้องกับครึ่งหนึ่งของคาบสัญญาณดิจิทัล
3. การประเมินสี่ขอบ (Four-edge)
นับทั้งขอบขึ้นและขอบลงของทั้งสองช่องสัญญาณ ดังนั้นหนึ่งขั้นการวัดจะสอดคล้องกับหนึ่งในสี่ของคาบสัญญาณดิจิทัล
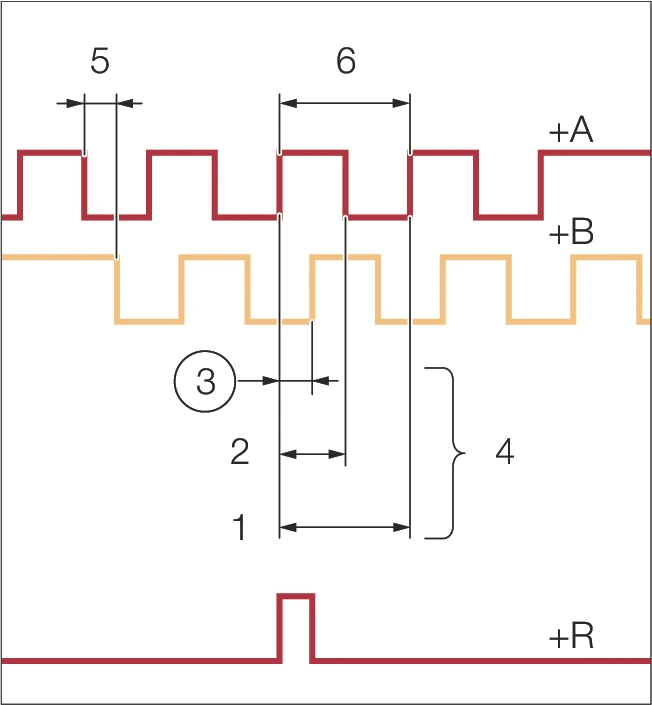
1. การประเมินขอบเดียว 2. การประเมินสองขอบ 3. การประเมินสี่ขอบ
4. หนึ่งขั้นการวัดในแต่ละกรณี 5. ความละเอียด 6. คาบสัญญาณดิจิทัล
6.3.1 ความละเอียด
ความละเอียดคือการเปลี่ยนแปลงตำแหน่งที่เล็กที่สุดที่ระบบวัดสามารถวัดได้ ซึ่งสอดคล้องกับระยะห่างระหว่างสองขอบของสัญญาณ Quadrature ความละเอียดถูกกำหนดโดยคาบของสัญญาณอะนาล็อก ตัวประกอบการอินเทอร์โพเลต และวิธีการประเมิน
ตัวอย่างการคำนวณความละเอียด (A)
| I ตัวประกอบการอินเทอร์โพเลต (ค่าเริ่มต้น) | 250 |
| P คาบของสัญญาณอินพุต | 100 µm |
| E การประเมิน (4 ขอบ) | ตัวประกอบ = 4 |
A = PI × E = 100 µm250 × 4 = 0.1 µm
6.4 ความถี่สัญญาณ
ความถี่สัญญาณที่เอาต์พุตโมดูลอินเทอร์เฟซขึ้นอยู่กับความเร็วในการเคลื่อนที่และความละเอียด (โมดูลดิจิทัล) หรือขนาดอินครีเมนต์ของสเกลมิติ (โมดูลอะนาล็อก) เพื่อให้แน่ใจว่าไม่มีขั้นตอนที่หายไป ความถี่อินพุตสูงสุดของคอนโทรลเลอร์ต้องมากกว่าความถี่เอาต์พุตสูงสุดที่คำนวณได้ของโมดูลอินเทอร์เฟซ
f = vP
f = ความถี่ (Hz) v = ความเร็ว (m/s) P = ขนาดอินครีเมนต์ (m)
6.4.1 ตัวอย่างการคำนวณสำหรับ MINISLIDE MSQscale แบบอะนาล็อก
| v ความเร็วในการเคลื่อนที่ | 2 m/s |
| P คาบสัญญาณ (สอดคล้องกับขนาดอินครีเมนต์ของสเกลมิติ) | 100 µm |
f = vP = 2 m/s100 × 10-6 m = 20,000 Hz = 20 kHz
6.4.2 ตัวอย่างการคำนวณสำหรับ MINISLIDE MSQscale แบบดิจิทัล
ความถี่เอาต์พุตสูงสุดของโมดูลอินเทอร์เฟซดิจิทัลคือ 8 MHz ต่อช่อง ซึ่งหมายความว่าสัญญาณ A และสัญญาณ B แต่ละสัญญาณมีความถี่สูงสุดได้ 8 MHz ด้วยการประเมิน 4 ขอบของสัญญาณ A/B อัตราการนับคือ 32 MHz ซึ่งสอดคล้องกับความเร็วสูงสุด 3.2 m/s ที่ความละเอียด 0.1 µm
ประสิทธิภาพสูงสุดของ MINISLIDE MSQscale แบบดิจิทัล
| v ความเร็วสูงสุด | 3.2 m/s |
| A ความละเอียด | 0.1 µm |
| P คาบสัญญาณดิจิทัล (4 × ความละเอียด) | 0.4 µm |
การคำนวณความถี่เอาต์พุตสูงสุดของโมดูลอินเทอร์เฟซ ซึ่งสอดคล้องกับช่วงความถี่อินพุตขั้นต่ำที่คอนโทรลเลอร์ต้องการ:
f = vP = 3.2 m/s0.4 × 10-6 m = 8,000,000 Hz = 8 MHz
การคำนวณความถี่การนับขั้นต่ำที่คอนโทรลเลอร์ต้องการ (ด้วยการประเมิน 4 ขอบ):
fนับ = vA = 3.2 m/s0.1 × 10-6 m = 32,000,000 Hz = 32 MHz
ตัวอย่างความเร็ว v
ในทางกลับกัน ความเร็วหรือความละเอียดสามารถคำนวณได้จากความถี่ที่กำหนด (เช่น ถูกจำกัดโดยคอนโทรลเลอร์ที่เลือก)
| f ความถี่อินพุตสูงสุดของคอนโทรลเลอร์ | 1 MHz |
| A ความละเอียด | 0.1 µm |
| P คาบสัญญาณดิจิทัล (4 × ความละเอียด) | 0.4 µm |
Vสูงสุด = f × P = 1 MHz × 0.4 µm = 0.4 m/s