6.4.1 การจัดวางระบบวัดและหัวอ่าน
ตำแหน่งหัวอ่านและด้านกำหนดตำแหน่ง
หัวอ่าน AMS สามารถติดตั้งบนแคร่เลื่อนได้ใน 4 ตำแหน่ง ซึ่งช่วยให้ระบบวัดสามารถปรับเข้ากับการออกแบบโครงสร้างได้อย่างยืดหยุ่น
การกำหนดค่าต้องดำเนินการตามขั้นตอนต่อไปนี้:
- กำหนดด้านกำหนดตำแหน่งของรางนำ
- กำหนดด้านของสเกลออปติก
- ทุกการรวมกันเป็นไปได้ คำอธิบายของแต่ละแบบมีดังต่อไปนี้:

- กำหนดด้านกำหนดตำแหน่งของแคร่เลื่อนเทียบกับรางนำ
- ด้านกำหนดตำแหน่งของแคร่เลื่อน:


- ตำแหน่งหัวอ่านสามารถกำหนดได้จากขั้นตอนก่อนหน้า โดยต้องวางหัวอ่านไว้ที่ด้านสเกลออปติก
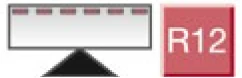
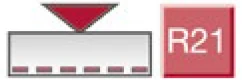
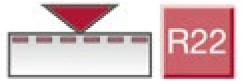
- ตำแหน่งเปลือกหุ้ม:
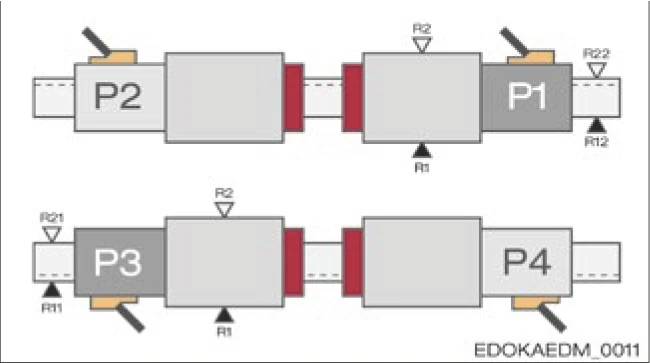
ตำแหน่งเปลือกหุ้ม
การกำหนดค่าระบบวัด
SCHNEEBERGER แนะนำให้วางหัวอ่านระหว่างแคร่เลื่อนบนด้านนอกของรางนำ ซึ่งมีข้อดีดังต่อไปนี้:
- ไม่ต้องการพื้นที่ติดตั้งเพิ่มเติมหรือความยาวรางนำเพิ่มเติมสำหรับรองรับเปลือกหุ้มและหัวอ่าน
- หัวอ่านอยู่ในตำแหน่งที่ได้รับการป้องกันระหว่างแคร่เลื่อน
- โดยทั่วไปหัวอ่านสามารถเข้าถึงได้ง่ายเพื่อการบำรุงรักษา
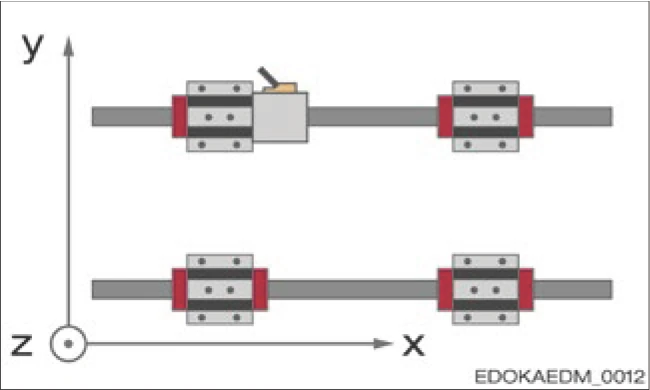
รูปที่ 6.xx - ตำแหน่งหัวอ่านเมื่อมีแคร่เลื่อนหลายตัว
นอกจากนี้ ขึ้นอยู่กับทิศทางการติดตั้งของแกน ควรพิจารณาคำแนะนำต่อไปนี้
แกนแนวนอน
รางนำวางขนานกันแนวนอน แนวตั้ง หรือหมุน 180° คำแนะนำทั่วไปคือให้วางหัวอ่านระหว่างแคร่เลื่อน ตราบใดที่ฝาครอบสไลด์ของเครื่องจักรปิดคลุมพื้นที่รางนำและหัวอ่าน และการออกแบบเครื่องจักรป้องกันไม่ให้สิ่งสกปรกหรือเศษโลหะสะสมข้างรางนำ หัวอ่านจะได้รับการป้องกันเป็นอย่างดีในทุกกรณี เมื่อใช้งานในสภาพแวดล้อมที่มีสิ่งสกปรกและสารระบายความร้อน จำเป็นต้องใช้มาตรการป้องกันเพิ่มเติม
รูปที่ 6.xx - การกำหนดค่าหัวอ่านสำหรับแกนแนวนอน
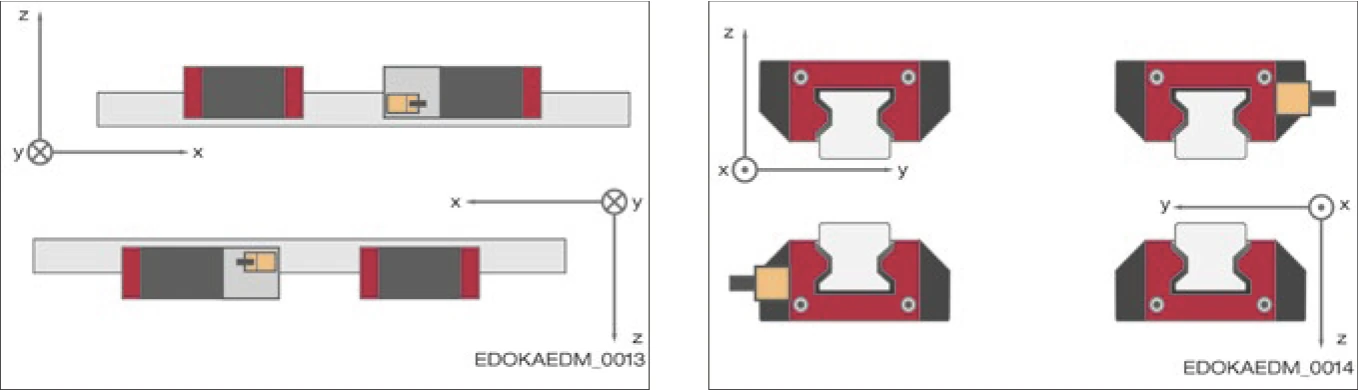
แกนแนวตั้ง
ตำแหน่งที่เหมาะสมที่สุดคือแขวนไว้ใต้แคร่เลื่อนด้านบนตามที่แสดงในรูป อนุภาคสิ่งสกปรกและเศษโลหะที่ตกลงมาจะไม่สะสมบนหัวอ่าน การป้อนสารหล่อลื่นได้รับการรับรองจากข้อต่อหล่อลื่นบนแคร่เลื่อนด้านบน
รูปที่ 6.xx - การกำหนดค่าหัวอ่านสำหรับแกนแนวตั้ง
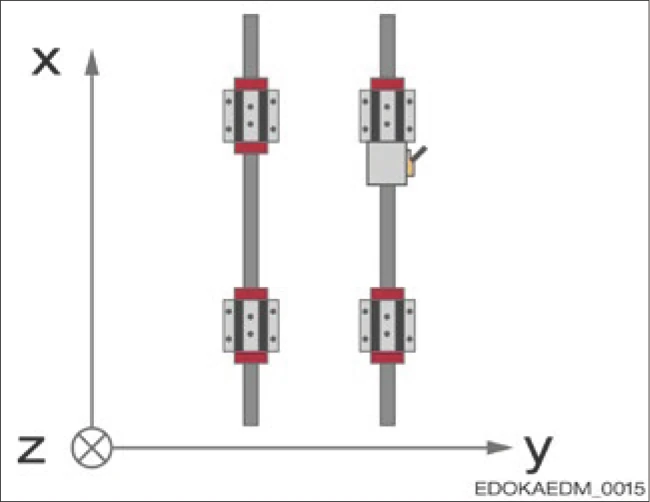
แกนแนวนอนแบบยึดผนัง
รางนำจัดเรียงทับซ้อนกันและหมุน 90° ตำแหน่งที่เหมาะสมที่สุดของหัวอ่าน ขึ้นอยู่กับการเข้าถึงแกน คือด้านล่างของรางนำล่าง (ตราบใดที่ไม่มีเศษโลหะสะสมในพื้นที่นี้) หรือด้านล่างของรางนำบน คำแนะนำนี้ใช้ได้กับแกนเตียงเอียงด้วย เช่น แกนที่ติดตั้งโดยหมุนรอบแกนยาว
รูปที่ 6.xx - การกำหนดค่าหัวอ่านสำหรับแกนแนวนอนแบบยึดผนัง; หมุน 90° รอบแกนยาว หรือเอียง เช่น เอียง 45° รอบแกนยาว
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการกำหนดค่ารางนำ ทิศทางการติดตั้ง และการหล่อลื่น โปรดดูหัวข้อ 4.8 - การกำหนดค่ารางนำ และหัวข้อ 4.9 - วิธีการติดตั้งระบบรางนำ
6.4.2 การเดินสายและการเชื่อมต่อกับตัวควบคุม อินเทอร์เฟซหัวอ่าน
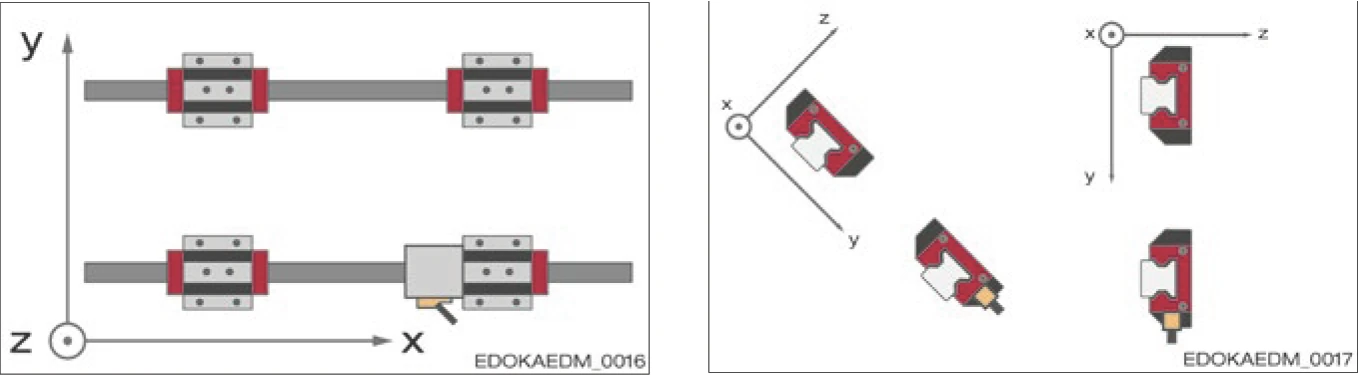
ขึ้นอยู่กับประเภท ระบบวัด AMS สามารถมาพร้อมกับอินเทอร์เฟซเชิงกลที่แตกต่างกัน โปรดดูแคตตาล็อกผลิตภัณฑ์ SCHNEEBERGER MONORAIL และ AMS โดยหลักการมีขั้วต่อ 3 ประเภทให้เลือก:
- A: ประเภท S
- B: ประเภท R
- C: ประเภท M
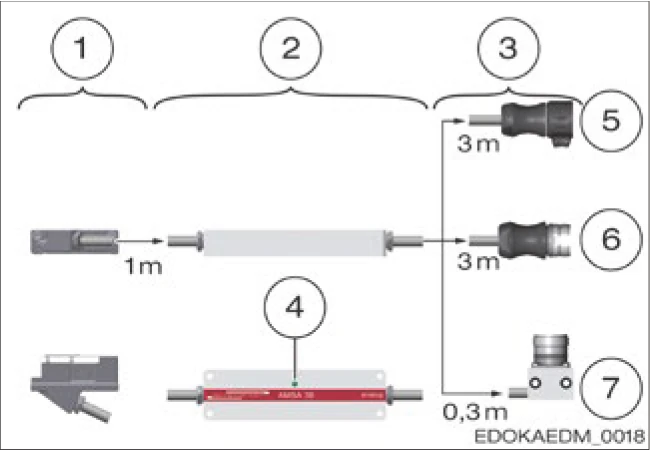
รูปที่ 6.xx - ภาพรวมชุดประกอบหัวอ่าน AMS
SCHNEEBERGER แนะนำให้ใช้ขั้วต่อประเภท M เนื่องจากสามารถติดตั้งโดยตรงบนเครื่องจักรใกล้กับท่อร้อยสายผ่านรูยึดในแผ่นยึด จากจุดนี้ สำหรับ AMSA และ AMSD สามารถใช้สายต่อ KAO 13 เพื่อต่อการเชื่อมต่อไปยังจุดเชื่อมต่อตัวควบคุม
สำหรับภาพรวมของอินเทอร์เฟซ สายต่อ และสายเชื่อมต่อ โปรดดูแคตตาล็อกผลิตภัณฑ์ SCHNEEBERGER MONORAIL และ AMS
สำหรับการใช้งานแบบพิเศษ อินเทอร์เฟซหัวอ่านยังสามารถมีสายเชื่อมต่อยาว 0.17 m ระหว่างหัวอ่านและกล่องอิเล็กทรอนิกส์
กล่องอิเล็กทรอนิกส์
กล่องอิเล็กทรอนิกส์ของหัวอ่านควรติดตั้งในตำแหน่งที่เข้าถึงได้ง่ายเพื่อการบำรุงรักษา มี LED สำหรับแสดงสถานะการทำงาน นอกจากนี้ สิ่งสำคัญคือต้องแน่ใจว่าสายไฟที่เข้าและออกจากกล่องถูกดึงตึงหลังการวาง และมีรัศมีดัดโค้งขั้นต่ำ (ดูด้านล่าง)
สายไฟ
เมื่อวางสายไฟของระบบวัด ต้องปฏิบัติตามข้อกำหนดต่อไปนี้:
- ควรใช้สาย 12 ขาที่มีหน้าตัดขั้นต่ำ [4 x (2 x 0.14) + (2 x (2 x 0.5)] mm2 เป็นสายต่อและสายเชื่อมต่อระหว่างระบบวัดและตัวควบคุม
- ความยาวสายสูงสุด:
| ประเภทสัญญาณ | ความยาวสายสูงสุด |
|---|---|
| อนาล็อก | 30 m |
| ดิจิทัล | 50 m |
| แบบ Absolute | 30 m |
- เมื่อใช้ AMS กับสัญญาณอนาล็อกและอิเล็กทรอนิกส์แปลงสัญญาณดิจิทัล SMEa ความยาวสายที่ระบุยังคงใช้ได้ หมายความว่าสูงสุด 30 m ระหว่างระบบวัดและ SMEa และสูงสุด 50 m ระหว่าง SMEa และตัวควบคุม
- สำหรับท่อร้อยสาย ให้ดูขนาดแผ่นยึดหรือเส้นผ่านศูนย์กลางขั้วต่อ (Ø = 28 mm) ในแคตตาล็อก
- อย่าวางสายไฟใกล้แหล่งสัญญาณรบกวน เช่น สนามแม่เหล็กจากแหล่งจ่ายไฟ สายไฟหลัก มอเตอร์ วาล์ว รีเลย์ และสายป้อนไฟฟ้า ระยะห่างที่เพียงพอจากสายรบกวนสามารถทำได้โดยปฏิบัติตาม:
- ระยะห่าง 0.1 m
- เมื่อใช้ท่อร้อยสายโลหะ ต้องมีผนังกั้นที่ต่อสายดิน
- รักษาระยะห่างอย่างน้อย 0.2 m จากตัวเหนี่ยวนำเก็บประจุในแหล่งจ่ายไฟแบบสวิตชิ่ง
- แยกสายยางไฮดรอลิกและสายไฟออกจากกัน
- วางสายหัวอ่านให้อยู่นิ่งที่สุดเท่าที่เป็นไปได้ เช่น อย่าวางในท่อร้อยสายที่เคลื่อนไหว ให้ใช้สายต่อสำหรับท่อร้อยสาย
- อย่าใช้ท่อที่มีขอบคม
- วางสายไฟโดยไม่มีแรงดึงใดๆ
- ปฏิบัติตามรัศมีดัดโค้งของสาย:
- เชื่อมต่อเปลือกของระบบวัดและตัวควบคุมขับเคลื่อนกับสายดินของตัวควบคุมขับเคลื่อนผ่านตัวเครื่องและ/หรือตู้ควบคุม
- เชื่อมต่อการป้องกันสัญญาณรบกวนของสายเชื่อมต่อโดยตรงกับตัวควบคุมขับเคลื่อน โดยเปลือกขั้วต่อครอบคลุมพื้นที่ผิวขนาดใหญ่ และลดค่าอินดักแตนซ์ให้น้อยที่สุดเท่าที่เป็นไปได้
- หลีกเลี่ยงการสัมผัสทางไฟฟ้าระหว่างขั้วต่อ (ปลั๊ก) กับชิ้นส่วนโลหะอื่นๆ เมื่อมีขั้วต่อในเส้นทางการเดินสาย
- เพื่อป้องกันการต่อสายดินผ่านเปลือกโลหะ ให้ใช้เฉพาะสายส่งที่มีขั้วต่อโลหะหุ้มพลาสติก
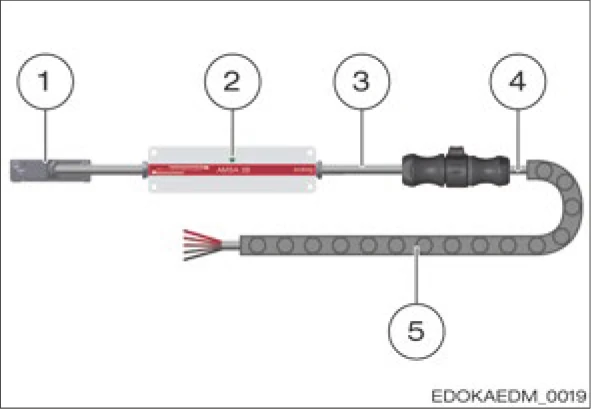
รูปที่ 6.xx - อินเทอร์เฟซหัวอ่านพร้อมท่อร้อยสาย
| เส้นผ่านศูนย์กลางสาย | รัศมีดัดโค้งที่อนุญาต | |
|---|---|---|
| การดัดสลับกัน | การดัดครั้งเดียว | |
| 6 mm | > 75 mm | > 20 mm |
| 8 mm | > 100 mm | > 40 mm |
การป้องกันสัญญาณรบกวน
สายไฟของระบบวัด AMS มาพร้อมการป้องกันสัญญาณรบกวนจากสนามแม่เหล็กไฟฟ้าเป็นมาตรฐาน การป้องกันสัญญาณรบกวนในสายเชื่อมต่อเชื่อมต่อกับตัวควบคุมผ่านเปลือกขั้วต่อ นอกจากการป้องกันสัญญาณรบกวนของสาย เปลือกโลหะของระบบวัดและตัวควบคุมขับเคลื่อนยังทำหน้าที่ป้องกันสัญญาณรบกวนด้วย เปลือกเหล่านี้ต้องมีศักย์ไฟฟ้าเท่ากันทุกประการ และต้องเชื่อมต่อกับสายดินป้องกันของตัวควบคุมขับเคลื่อนผ่านตัวเครื่องหรือตู้ควบคุม หน้าตัดของสายต่อศักย์ไฟฟ้าต้องมีขนาดอย่างน้อย 6 mm2 (Cu)
หมายเหตุ
การเข้าถึงระบบวัดหลังการติดตั้ง
สำหรับแกนที่เข้าถึงได้ยาก แนะนำให้เปิดช่องตรวจสอบบนเครื่องจักรเพื่อให้ดำเนินการบำรุงรักษาระบบวัดได้สะดวก วิธีนี้ทำให้หัวอ่านรวมถึงจุดเชื่อมต่อของสายหัวอ่านและสายต่อสามารถเข้าถึงได้ง่าย