บทที่ 7: คำศัพท์และคำจำกัดความ
7.1 โมดูลอินเทอร์เฟซ
ในโมดูลอินเทอร์เฟซ ข้อมูลเซ็นเซอร์จะถูกแปลงเป็นสัญญาณอะนาล็อกมาตรฐาน (1 Vpp) หรือสัญญาณดิจิทัลมาตรฐาน (TTL)
- สัญญาณถูกขยาย
- ข้อผิดพลาดเฟสระหว่างสัญญาณไซน์และโคไซน์ได้รับการแก้ไข
- ออฟเซตได้รับการชดเชย
โมดูลอินเทอร์เฟซดิจิทัลยังรวมถึงอินเทอร์โพเลเตอร์ที่แปลงสัญญาณอะนาล็อกเป็นสัญญาณดิจิทัล สำหรับข้อมูลเพิ่มเติม ดูหัวข้อ 6.2 "การอินเทอร์โพเลต"
7.1.1 การเปรียบเทียบโมดูลอินเทอร์เฟซแบบอะนาล็อกและดิจิทัล
| ดิจิทัล (D) | อะนาล็อก (A) | |
|---|---|---|
| ข้อดี |
|
|
| ข้อเสีย | ความถี่สูงมากที่ความเร็วสูงและความละเอียดสูง | ไม่สามารถปรับเทียบใหม่ที่สถานที่ของลูกค้าได้ ซึ่งหมายความว่าต้องเปลี่ยนทั้งระบบ (รางนำและโมดูลอินเทอร์เฟซ) เมื่อเกิดข้อบกพร่อง |

ดิจิทัล พร้อมเคส

อะนาล็อก พร้อมเคส

มุมมองบน: ดิจิทัล ไม่มีเคส

มุมมองบน: อะนาล็อก ไม่มีเคส

มุมมองล่าง: ดิจิทัล ไม่มีเคส

มุมมองล่าง: อะนาล็อก ไม่มีเคส
7.2 ระดับความแม่นยำ
ระดับความแม่นยำระบุค่าเบี่ยงเบนการวัดสูงสุดที่คาดหวังของระบบภายใต้เงื่อนไขการทำงานที่ระบุ ระบบวัดระยะทางที่มีระดับความแม่นยำ 3 µm อนุญาตให้มีค่าเบี่ยงเบน +/- 3 µm
7.3 ความสามารถในการทำซ้ำ
ความสามารถในการทำซ้ำแบบทิศทางเดียวของระบบวัดโดยทั่วไปหมายถึงความสามารถในการทำซ้ำผลลัพธ์ที่ระบบส่งคืนภายใต้เงื่อนไขสภาพแวดล้อมที่เหมือนกันทุกประการ ในการประเมินนี้ ต้องทราบค่าเบี่ยงเบนการวัดและนำมาพิจารณาในการวิเคราะห์
ความสามารถในการทำซ้ำของตำแหน่งแกนสามารถกำหนดได้สำหรับความเร็วในการเคลื่อนที่ที่เฉพาะเจาะจงโดยใช้วิธีง่ายๆ โดยการคำนวณค่าเฉลี่ยเลขคณิตและส่วนเบี่ยงเบนมาตรฐานของการวัดจำนวนมาก
7.4 การอ้างอิงตำแหน่ง
ระบบวัดแบบอินครีเมนทัลไม่สามารถกำหนดตำแหน่งที่แน่นอนหลังจากเปิดเครื่อง ด้วยเหตุนี้ จึงมีการเพิ่มแทร็กอ้างอิงควบคู่กับแทร็กอินครีเมนทัล สามารถทำเครื่องหมายจุดอ้างอิงหนึ่งจุดหรือหลายจุดบนแทร็กอ้างอิง
จำเป็นต้องวิ่งอ้างอิงของแคร่เลื่อนเพื่ออ้างอิงระบบ โดยปกติแกนจะเคลื่อนที่ในทิศทางเดียวจนถึงตัวหยุดทางกล จากนั้นแกนจะเคลื่อนที่ย้อนกลับจนกว่าจะผ่านเครื่องหมายอ้างอิง โดยปกติเครื่องหมายอ้างอิงแบบระยะห่างเท่ากันจะเข้าถึงจากทิศทางเดียวเสมอ (แบบทิศทางเดียว)
จากนั้นคอนโทรลเลอร์สามารถปรับเปลี่ยนตัวนับภายในเป็นค่าที่ระบุโดยใช้สัญญาณอ้างอิง สำหรับโมดูลอินเทอร์เฟซอะนาล็อก คอนโทรลเลอร์จะจดจำตำแหน่งที่กำหนดไว้ล่วงหน้าสำหรับสัญญาณอินครีเมนทัล (โดยปกติ SIN = COS และทั้งคู่มากกว่าศูนย์) รวมถึง REF = "high" เป็นตำแหน่งอ้างอิง
7.5 การเบี่ยงเบนเป็นคาบ
ระบบวัดระยะทางแบบอินครีเมนทัลทุกระบบได้รับอิทธิพลจากผลของการเบี่ยงเบนเป็นคาบ ซึ่งความยาวคลื่นสอดคล้องกับระยะห่างของสเกลหรือเศษส่วนของมัน การเบี่ยงเบนเป็นคาบนี้ เรียกอีกอย่างว่าค่าเบี่ยงเบนคลื่นสั้น (SWD) เกิดขึ้นเนื่องจากความเบี่ยงเบนเล็กน้อยในระบบเซ็นเซอร์หรือการประมวลผลสัญญาณไฟฟ้า ซึ่งหมายความว่าสัญญาณไซน์และโคไซน์เบี่ยงเบนจากรูปแบบทางคณิตศาสตร์ที่แน่นอน สามารถจำแนกการเบี่ยงเบนตามการจัดเรียง (ฮาร์โมนิก)
| คาบ SWD | การเบี่ยงเบนเกิดขึ้นเนื่องจาก |
|---|---|
| 1 คาบสัญญาณ | ออฟเซตไซน์/โคไซน์ |
| 1/2 คาบสัญญาณ | แอมพลิจูดไซน์และโคไซน์แตกต่างกัน |
| 1/3 - 1/8 คาบสัญญาณ | เซ็นเซอร์ส่งสัญญาณที่แตกต่างจากรูปไซน์โดยพื้นฐาน |
7.5.1 ข้อผิดพลาดการอินเทอร์โพเลต
หากการเบี่ยงเบนเป็นคาบเกิดขึ้นเฉพาะระหว่างการดิจิไทซ์และการคำนวณตำแหน่ง เรียกว่าข้อผิดพลาดการอินเทอร์โพเลต
7.6 ข้อผิดพลาดตัวเปรียบเทียบ (Comparator Error)
ข้อผิดพลาดตัวเปรียบเทียบ เรียกอีกอย่างว่าข้อผิดพลาด Abbe คือความเบี่ยงเบนเชิงระบบที่เกิดขึ้นเมื่อแกนของมาตรฐานความยาวไม่ตรงกับแกนของมาตรฐานระยะทาง สาเหตุของความเบี่ยงเบนคือการเคลื่อนที่หมุนเล็กน้อยในการออกแบบแกน ซึ่งส่งผลต่อผลการวัด
7.7 อัตราการสุ่มตัวอย่าง
อัตราการสุ่มตัวอย่างอธิบายความถี่ที่สัญญาณอะนาล็อกถูกสุ่มตัวอย่างต่อช่วงเวลา โดยปกติช่วงเวลาคือหนึ่งวินาที ซึ่งเป็นเหตุผลที่หน่วยของอัตราการสุ่มตัวอย่างคือ Hz เพื่อรับประกันการสร้างสัญญาณต้นฉบับที่สมบูรณ์ ความถี่การสุ่มตัวอย่างควรมากกว่าสัญญาณต้นฉบับอย่างน้อยสองเท่าตามทฤษฎีบทการสุ่มตัวอย่าง Nyquist-Shannon
7.8 การส่งสัญญาณแบบ Single-Ended
สำหรับการส่งสัญญาณแบบ single-ended แรงดันจะเปลี่ยนแปลงเทียบกับศักย์อ้างอิง (กราวด์ไฟฟ้า) นี่เป็นวิธีง่ายและสะดวกในการถ่ายโอนข้อมูล โดยใช้สายเพียงเส้นเดียวต่อสัญญาณ
ข้อเสียคือมีความไวต่อสัญญาณรบกวนค่อนข้างสูง ดังนั้นควรใช้การส่งสัญญาณประเภทนี้เฉพาะระยะทางสั้นและความเร็วต่ำ
7.9 การส่งสัญญาณแบบดิฟเฟอเรนเชียล
สำหรับการส่งสัญญาณแบบดิฟเฟอเรนเชียล สัญญาณถูกอธิบายด้วยความต่างแรงดันโดยไม่อ้างอิงกับกราวด์ไฟฟ้า แทนที่จะใช้สายนำสัญญาณเส้นเดียว จะใช้สายคู่ เส้นหนึ่งนำสัญญาณ และอีกเส้นหนึ่งนำสัญญาณอินเวิร์ส คอนโทรลเลอร์จะสร้างความแตกต่างระหว่างสองสัญญาณเป็นสัญญาณความแตกต่าง (เช่น สัญญาณ A+ และ A- กลายเป็น A)
การส่งสัญญาณแบบดิฟเฟอเรนเชียลเป็นวิธีที่ดีกว่าสำหรับการใช้งานส่วนใหญ่เนื่องจากทนต่อสัญญาณรบกวนได้ดีกว่า การจับคู่กับสัญญาณเกือบเหมือนกันสำหรับทั้งสองสายทำให้สัญญาณรบกวนเกือบถูกกำจัดเมื่อสร้างความแตกต่าง
มาตรฐาน RS422 (ดิฟเฟอเรนเชียล) ได้รับการพัฒนาขึ้นโดยเฉพาะสำหรับระยะทางที่ยาวกว่าและอัตราการถ่ายโอนที่สูงกว่า
7.10 ทิศทางการเคลื่อนที่
ทิศทางการเคลื่อนที่สามารถอ่านได้จากความสัมพันธ์เฟสของสัญญาณไฟฟ้า สัญญาณหนึ่งนำหน้าหรือตามหลังอีกสัญญาณหนึ่ง ขึ้นอยู่กับทิศทาง
ด้วยโมดูลอินเทอร์เฟซดิจิทัล: หากแคร่เลื่อนเคลื่อนที่ในทิศทางของ flexprint สัญญาณบนช่อง A จะนำหน้าช่อง B 90° จากนี้คอนโทรลเลอร์จะจดจำทิศทางการเคลื่อนที่เป็นบวก ซึ่งหมายความว่าตัวนับนับขึ้น ในทิศทางอื่น สัญญาณบนช่อง A จะตามหลังช่อง B 90° ตัวนับนับลง
ทิศทางการนับสำหรับโมดูลอินเทอร์เฟซอะนาล็อกจะกลับกัน
บทที่ 8: คำแนะนำการประยุกต์ใช้งาน
8.1 เงื่อนไขการทำงานของ MINISLIDE MSQscale
MINISLIDE MSQscale มีระบบวัดออปติคัลแบบเปิด เช่นเดียวกับระบบออปติคัลทุกประเภท สิ่งปนเปื้อนเช่นฝุ่นจะขัดขวางการทำงานของระบบ ดังนั้นไม่แนะนำให้ใช้ MINISLIDE MSQscale ในการใช้งานที่คาดว่าจะมีฝุ่น เศษชิ้นส่วน อนุภาค หรือของเหลวระหว่างการทำงาน รอยขีดข่วนขนาดใหญ่หรือความเสียหายอื่นๆ ต่อสเกลมิติก็เป็นอันตรายเช่นกัน
โดยทั่วไป MINISLIDE MSQscale เหมาะสมที่สุดสำหรับการใช้งานในสภาพแวดล้อมที่สะอาด โดยทั่วไปในสถานการณ์ที่ใช้อุปกรณ์ออปติคัลอื่นๆ หรือมีสภาพแวดล้อมที่สะอาด
ในแง่นี้ MINISLIDE MSQscale แตกต่างจากระบบวัดระยะทาง AMS ซึ่งได้รับการออกแบบมาเฉพาะสำหรับสภาพแวดล้อมที่รุนแรงกว่า
8.2 คุณสมบัติ EMC ของ MINISLIDE MSQscale
MINISLIDE MSQscale และอุปกรณ์เสริมได้รับการทดสอบตามมาตรฐาน EN 61000 ผลการทดสอบยืนยันว่า MINISLIDE MSQscale เป็นไปตามข้อกำหนดของมาตรฐาน อย่างไรก็ตาม สิ่งนี้ไม่ได้กำจัดความเป็นไปได้ของการรบกวนแม่เหล็กไฟฟ้าที่ไม่ต้องการในกรณีการใช้งานเฉพาะ การปฏิบัติตามแนวปฏิบัติการออกแบบ EMC ที่เกี่ยวข้องเป็นสิ่งจำเป็นเสมอ
8.3 ผลกระทบจากสนามแม่เหล็กต่อ MINISLIDE MSQscale
สนามแม่เหล็กสถิตไม่มีผลต่อ MINISLIDE MSQscale ผลการเหนี่ยวนำอาจเกิดขึ้นกับสนามสลับ ขึ้นอยู่กับการวางสาย
บทที่ 9: การแก้ปัญหา
9.1 การปรับเทียบโมดูลอินเทอร์เฟซดิจิทัล
การปรับเทียบจำเป็นเฉพาะสำหรับการส่งมอบโมดูลอินเทอร์เฟซดิจิทัลภายหลัง ไม่สามารถปรับเทียบโมดูลอินเทอร์เฟซอะนาล็อกโดยลูกค้าได้
ขั้นตอน:
- เปิด MINISLIDE MSQscale
- กดและถือปุ่มปรับเทียบ A ค้างไว้
- เคลื่อนรางนำช้าๆ ตลอดความยาวช่วงชักทั้งหมด
- ปล่อยปุ่มปรับเทียบ
- รีเซ็ต MINISLIDE MSQscale (= ปิดและเปิดใหม่)
- ขับรางนำตลอดความยาวช่วงชักทั้งหมดและตรวจสอบว่ามีเฉพาะ LED สีเขียวที่ติดสว่าง
- หาก LED สีแดงติดสว่าง ต้องทำซ้ำขั้นตอนการปรับเทียบ
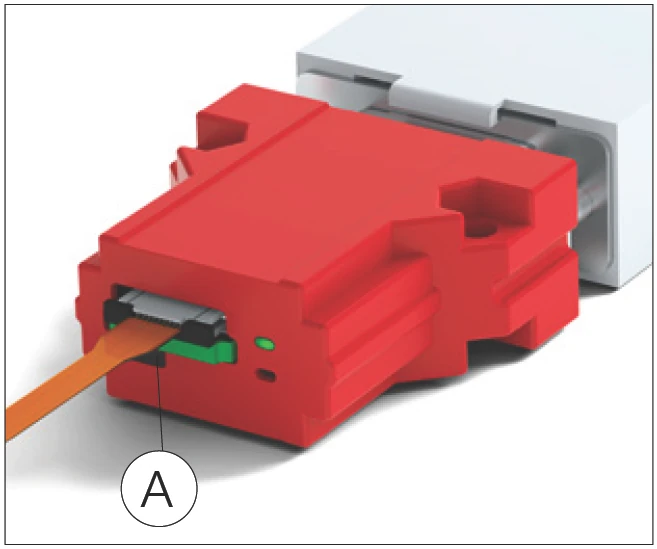
โมดูลอินเทอร์เฟซพร้อมเคส
A ปุ่มปรับเทียบ
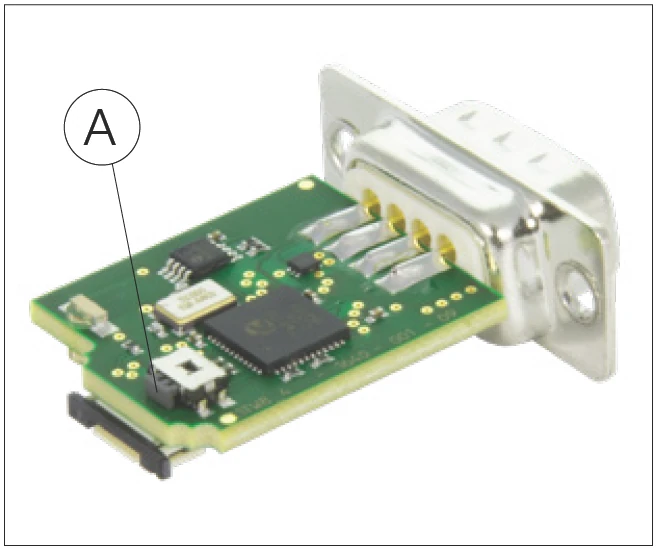
โมดูลอินเทอร์เฟซไม่มีเคส
A ปุ่มปรับเทียบ
9.2 คำอธิบายข้อผิดพลาด
| ข้อผิดพลาด | สาเหตุที่เป็นไปได้ | วิธีแก้ไข |
|---|---|---|
| LED สีเขียวบนโมดูลอินเทอร์เฟซไม่ติด | ไม่มีแรงดันไฟเลี้ยงหรือแรงดันไม่ถูกต้องที่โมดูลอินเทอร์เฟซ | ตรวจสอบแรงดันไฟเลี้ยง (+5V DC) |
| การกำหนดขาสายลูกค้าไม่ถูกต้อง | ตรวจสอบการกำหนดขา | |
| ขั้วต่อ D-Sub 9 หรือ Micro Match เชื่อมต่อไม่สมบูรณ์ | ตรวจสอบการเชื่อมต่อ | |
| MINISLIDE MSQscale ได้รับความเสียหายจากการจัดการที่ไม่ถูกต้อง (ไม่เป็นไปตามข้อกำหนด ESD) | เปลี่ยน MINISLIDE MSQscale | |
| LED สีแดงบนโมดูลอินเทอร์เฟซติดสว่าง | แรงดันไฟเลี้ยงไม่ถูกต้องที่โมดูลอินเทอร์เฟซ | ตรวจสอบแรงดันไฟเลี้ยง (+5V DC) |
| สายเซ็นเซอร์แบบยืดหยุ่นไม่ได้เชื่อมต่อกับโมดูลอินเทอร์เฟซ | เชื่อมต่อสายเซ็นเซอร์แบบยืดหยุ่น | |
| สายเซ็นเซอร์แบบยืดหยุ่นเชื่อมต่อไม่ถูกต้องกับโมดูลอินเทอร์เฟซ พื้นผิวสัมผัสของสายถูกหมุน 180° | หมุนสายเซ็นเซอร์แบบยืดหยุ่น 180° | |
| สายเซ็นเซอร์แบบยืดหยุ่นไม่ได้สอดเข้าขั้วต่อ ZIF อย่างสมบูรณ์ | ตรวจสอบการเชื่อมต่อ | |
| สายเซ็นเซอร์แบบยืดหยุ่นเสียหายหรือพับงอ (เช่น รอยแตกร้าวเล็กๆ ที่หน้าสัมผัส) | เปลี่ยน MINISLIDE MSQscale | |
| MINISLIDE MSQscale ได้รับความเสียหายจากการจัดการที่ไม่ถูกต้อง (ไม่เป็นไปตามข้อกำหนด ESD) | เปลี่ยน MINISLIDE MSQscale | |
| สัญญาณอินพุตเซ็นเซอร์อยู่นอกช่วงปกติ เช่น เนื่องจากสเกลมิติสกปรก | ทำความสะอาดและเคลือบสเกลมิติตามที่อธิบายในหัวข้อ 3.3 การปรับเทียบใหม่เป็นไปได้กับระบบดิจิทัล (ดูหัวข้อ 9.1) | |
| LED สีแดงติดสว่างจางๆ | เอาต์พุต "ERR NOT" เชื่อมต่อกับอินพุตที่มีอิมพีแดนซ์ต่ำ ทำให้กระแสเล็กน้อยไหลผ่าน LED | เชื่อมต่อเอาต์พุต "ERR NOT" กับอินพุตที่มีอิมพีแดนซ์สูง หรือไม่ต้องสนใจ LED ที่ติดจาง |
| ข้อมูลตำแหน่งไม่สอดคล้องกับระยะทางการเคลื่อนที่ | ความถี่อินพุตสูงสุดของคอนโทรลเลอร์ลูกค้าเกิน | ลดความเร็วในการเคลื่อนที่หรือความละเอียด |
| ตั้งค่าความละเอียดในคอนโทรลเลอร์ลูกค้าไม่ถูกต้อง | ปรับการตั้งค่าในคอนโทรลเลอร์ลูกค้า | |
| ตัวประกอบการประเมินขอบต่ำเกินไป | ตั้งค่าการประเมิน X4 ในคอนโทรลเลอร์ลูกค้า | |
| การรบกวนแม่เหล็กไฟฟ้า | ใช้มาตรการป้องกัน EMC: ใช้สายชีลด์แบบคู่บิดเกลียว เดินสายมอเตอร์และสายควบคุมแยกกัน เป็นต้น | |
| สายเซ็นเซอร์แบบยืดหยุ่นเสียหายหรือพับงอ (เช่น รอยแตกร้าวเล็กๆ ที่หน้าสัมผัส) | เปลี่ยน MINISLIDE MSQscale | |
| ข้อมูลตำแหน่งไม่สอดคล้องกับระยะทางการเคลื่อนที่ (ต่อ) | สเกลมิติสกปรกมาก | ทำความสะอาดและเคลือบสเกลมิติตามที่อธิบายในหัวข้อ 3.3 เปลี่ยนระบบหากจำเป็น |
| ความเร็วสูงสุด 3.2 m/s เกิน (ที่ความละเอียด 0.1 µm) | จำกัดความเร็วเป็น 3.2 m/s หรือลดความละเอียด | |
| ขัดข้องในโมดูลอินเทอร์เฟซดิจิทัล | หมายเลขบนโมดูลอินเทอร์เฟซไม่ตรงกับหมายเลขแคร่เลื่อน MINISLIDE MSQscale | ตรวจสอบการจับคู่โมดูลอินเทอร์เฟซและรางนำ |
| ทำการปรับเทียบตามที่อธิบายในหัวข้อ 9.1 | ||
| ส่งระบบกลับไปที่ SCHNEEBERGER | ||
| ขัดข้องในโมดูลอินเทอร์เฟซอะนาล็อก | หมายเลขบนโมดูลอินเทอร์เฟซไม่ตรงกับหมายเลขแคร่เลื่อน MINISLIDE MSQscale | ตรวจสอบการจับคู่โมดูลอินเทอร์เฟซและรางนำ |
| ส่งระบบกลับไปที่ SCHNEEBERGER เพื่อปรับเทียบ | ||
| ไม่พบเครื่องหมายอ้างอิง | ไม่ได้ผ่านเครื่องหมายอ้างอิง | ปรับระยะทางการเคลื่อนที่ |
| รางนำสกปรก | ทำความสะอาดและเคลือบสเกลมิติตามที่อธิบายในหัวข้อ 3.3 | |
| ส่งระบบกลับไปที่ SCHNEEBERGER | ||
| การแสดงตำแหน่งไม่ถูกต้องกับ USB counter Heilig & Schwab | อะนาล็อก: อินเทอร์โพเลเตอร์มีตัวประกอบการอินเทอร์โพเลตคงที่ 256 ส่งผลให้ความละเอียด 0.39 µm | คำนวณด้วยความละเอียดที่สอดคล้องกัน |
| ความถี่อินพุตสูงสุดของอินพุตดิจิทัลคือ 500 kHz ดังนั้นที่ความละเอียด 0.1 µm ความเร็วถูกจำกัดที่ 0.2 m/s (counter 026) หรือ 0.4 m/s (counter 046) | ลดความเร็วหรือความละเอียด | |
| ข้อผิดพลาดอื่นๆ | ต้องการการสืบสวนเพิ่มเติม | ติดต่อ SCHNEEBERGER |